
Автомат перекоса вертолета. Общий принцип управления.
Привет, друзья!

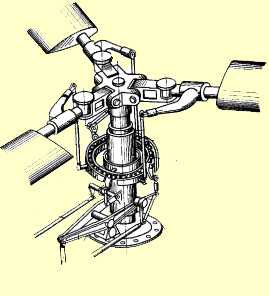
Втулка несущего винта с автоматом перекоса вертолета МИ-8.
Снова вернемся к нашим вертолетам :-), этим красивым и удивительным (несмотря на их кажущуюся сегодня обычность) аппаратам. Поговорим немного подробнее о принципах их управления.
В статье «Как летает вертолет» я этого уже коснулся. Для того чтобы вертолет двигался поступательно, нужен перекос винта, и создает его такой агрегат, как автомат перекоса вертолета. Вот о нем сегодня и поговорим.
Как известно для вертолета полная аэродинамическая сила — это сумма всех сил, действующих на каждую лопасть в отдельности. Силы эти я бы разделил на искусственные и на естественные.
О естественных. Каждая лопасть имеет определенный вес. Поэтому при вращении с достаточно большой скоростью на нее действует центробежная сила. Есть еще сила сопротивления и конечно подъемная сила лопасти. Вот эту самую подъемную силу вполне можно корректировать силами искусственными. А это как раз и делает
Лопасти несущего винта, описывая полный круг вокруг оси при его вращении, обтекаются встречным потоком воздуха по-разному. Полный круг – это 360º. Тогда примем заднее положение лопасти за 0º и далее через каждые 90º полный оборот. Так вот лопасть в интервале от 0º до 180º — это лопасть наступающая, а от 180º до 360º — отступающая. Принцип такого названия, я думаю, понятен. Наступающая лопасть движется навстречу набегающему потоку воздуха, и суммарная скорость ее движения относительно этого потока возрастает потому что сам поток, в свою очередь, движется ей навстречу. Ведь вертолет летит вперед. Соответственно растет и подъемная сила. (Для примера приведу пояснительный рисунок из «заслуженной» 🙂 книги об управлении вертолетом МИ-1.)
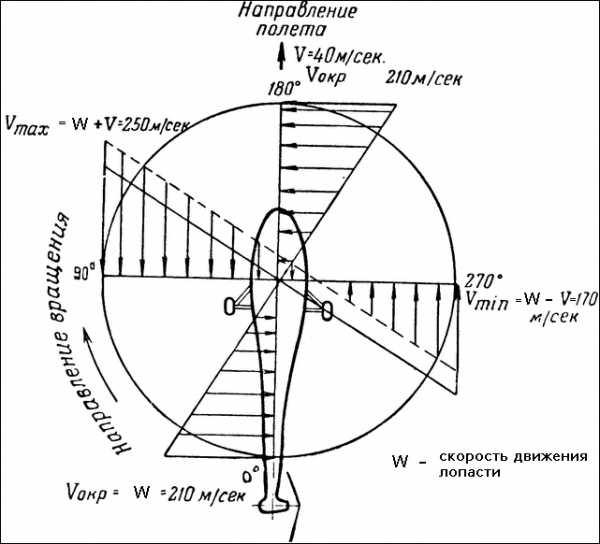
Изменение скоростей набегающего потока при вращении винта для вертолета МИ-1 (средние скорости полета).
У отступающей лопасти картина противоположная. От скорости набегающего потока отнимается скорость, с которой эта лопасть как бы от него «убегает» :-). В итоге имеем подъемную силу меньше. Получается серьезная разница сил на правой и левой стороне винта и отсюда явный переворачивающий момент. При таком положении вещей вертолет при попытке движения вперед будет иметь тенденцию к переворачиванию. Такие вещи имели место при первом опыте создания винтокрылых аппаратов.
Чтобы этого не происходило, конструктора применили одну хитрость. Дело в том, что лопасти несущего винта закреплены во втулке (это такой массивный узел, насаженный на выходной вал), но не жестко. Они с ней соединены с помощью специальных шарниров (или устройств, им подобных). Шарниры бывают трех видов: горизонтальные, вертикальные и осевые.
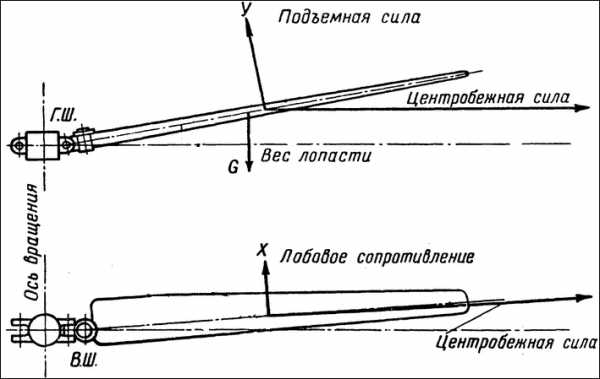
Силы, действующие на лопасть, подвешенную ко втулке винта на шарнирах.
Теперь посмотрим что же будет происходить с лопастью, которая подвешена к оси вращения на шарнирах. Итак, наша лопасть вращается с постоянной скоростью без каких-либо управляющих воздействий извне.
От 0º до 90º скорость обтекания лопасти растет, значит растет и подъемная сила. Но! Теперь лопасть подвешена на горизонтальном шарнире. В результате избыточной подъемной силы она, поворачиваясь в горизонтальном шарнире, начинает подниматься вверх ( специалисты говорят «делает взмах»). Одновременно из-за увеличения лобового сопротивления (ведь скорость обтекания возросла) лопасть отклоняется назад, отставая от вращения оси винта. Для этого как раз и служит вертикальный шарнир.
Однако при взмахе получается, что воздух относительно лопасти приобретает еще и некоторое движение вниз и, таким образом, угол атаки относительно набегающего потока уменьшается. То есть рост избыточной подъемной силы замедляется. На это замедление оказывает свое дополнительно влияние отсутствие управляющего воздействия. Это значит, что тяга автомата перекоса, присоединенная к лопасти, сохраняет свое положение неизменным, и лопасть, взмахивая, вынуждена поворачиваться в своем осевом шарнире, удерживаемая тягой и, тем самым, уменьшая свой установочный угол или угол атаки по отношению к набегающему потоку. (Картина происходящего на рисунке. Здесь У – это подъемная сила, Х – сила сопротивления, Vy – вертикальное движение воздуха, α – угол атаки.)

Картина изменения скорости и угла атаки набегающего потока при вращении лопасти несущего винта.
До точки 90º избыточная подъемная сила будет продолжать расти, однако из-за вышесказанного со все большим замедлением. После 90º эта сила будет уменьшаться, но из-за ее присутствия лопасть будет продолжать двигаться вверх, правда все медленнее. Максимальную высоту взмаха она достигнет уже несколько перевалив за точку 180º. Это происходит потому, что лопасть имеет определенный вес, и на нее действуют еще и силы инерции.
При дальнейшем вращении лопасть становится отступающей, и на нее действуют все те же процессы, но уже в обратном направлении. Величина подъемной силы падает и центробежная сила вместе с силой веса начинают опускать ее вниз. Однако при этом растут углы атаки для набегающего потока (теперь уже воздух движется вверх по отношению к лопасти), и растет установочный угол лопасти из-за неподвижности тяг автомата перекоса вертолета. Все происходящее поддерживает подъемную силу отступающей лопасти на необходимом уровне. Лопасть продолжает опускаться и минимальной высоты взмаха достигает уже где-то после точки 0º, опять же из-за сил инерции.
Таким образом, лопасти вертолета при вращении несущего винта как бы «машут» или еще говорят «порхают». Однако это порхание вы, так сказать, невооруженным взглядом вряд ли заметите. Подъем лопастей вверх (как и отклонение их назад в вертикальном шарнире) очень незначительны. Дело в том, что на лопасти оказывает очень сильное стабилизирующее воздействие центробежная сила. Подъемная сила, например, больше веса лопасти в 10 раз, а центробежная – в 100 раз. Именно центробежная сила превращает на первый взгляд «мягкую» гнущуюся в неподвижном положении лопасть в жесткий, прочный и отлично работающий элемент несущего винта вертолета.
Однако несмотря на свою незначительность вертикальное отклонение лопастей присутствует, и несущий винт при вращении описывает конус, правда очень пологий. Основание этого конуса и есть плоскость вращения винта.

Силы, действующие на вертолет.
Теперь главная мысль :-). В известной статье я уже говорил, что для придания вертолету поступательного движения нужно эту плоскость наклонить, дабы появилась горизонтальная составляющая полной аэродинамической силы, то есть горизонтальная тяга винта. Иначе говоря, нужно наклонить весь воображаемый конус вращения винта. Если вертолету нужно двигаться вперед, значит конус должен быть наклонен вперед.
Исходя из описания движения лопасти при вращении винта, это означает, что лопасть в положении 180º должна опуститься, а в положении 0º (360º) должна подняться. То есть в точке 180º подъемная сила должна уменьшиться, а в точке 0º(360º) увеличиться. А это в свою очередь можно сделать уменьшив установочный угол лопасти в точке 180º и увеличив его в точке 0º (360º). Аналогичные вещи должны происходить при движении вертолета в других направлениях. Только при этом, естественно, аналогичные изменения положения лопастей будут происходить в других угловых точках.
Понятно, что в промежуточных углах поворота винта между указанными точками установочные углы лопасти должны занимать промежуточные положения, то есть угол установки лопасти меняется при ее движении по кругу постепенно, циклично.Он так и называется циклический угол установки лопасти (циклический шаг винта). Я выделяю это название потому, что существует еще и общий шаг винта (общий угол установки лопастей). Он изменяется одновременно на всех лопастях на одинаковую величину. Обычно это делается для увеличения общей подъемной силы несущего винта.
Такие действия как раз и выполняет автомат перекоса вертолета. Он изменяет угол установки лопастей несущего винта (шаг винта), вращая их в осевых шарнирах посредством присоединенных к ним тяг. Обычно всегда присутствуют два канала управления: по тангажу и по крену, а также канал изменения общего шага несущего винта.
Тангаж означает угловое положение летательного аппарата относительно его поперечной оси (нос вверх-вниз :-)), а крен, соответственно, относительно его продольной оси (наклон влево-вправо :-)).
Конструктивно автомат перекоса вертолета выполнен достаточно сложно, но пояснить его устройство вполне можно на примере аналогичного узла модели вертолета. Модельный автомат, конечно, устроен попроще своего старшего собрата, но принцип абсолютно тот же :-).

Автомат перекоса модели вертолета.
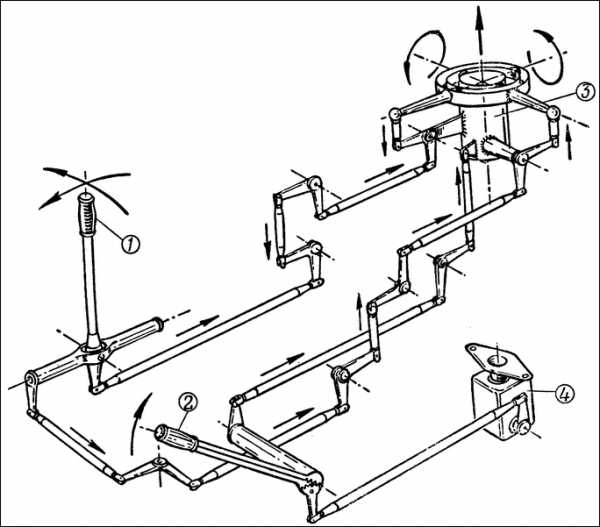
Это двухлопастной вертолет. Управление угловым положением каждой лопасти осуществляется через тяги 6. Эти тяги соединены с так называемой внутренней тарелкой 2 (из белого металла). Она вращается вместе с винтом и в установившемся режиме параллельна плоскости вращения винта. Но она может менять свое угловое положение (наклон), так как закреплена на оси винта через шаровую опору 3. При изменении своего наклона (углового положения) она воздействует на тяги 6, которые, в свою очередь, воздействуют на лопасти, поворачивая их в осевых шарнирах и меняя, тем самым, циклический шаг винта.
Внутренняя тарелка одновременно является внутренней обоймой подшипника, внешняя обойма которого – это внешняя тарелка винта 1. Она не вращается, но может менять свой наклон (угловое положение) под воздействием управления по каналу тангажа 4 и по каналу крена 5. Меняя свой наклон под воздействием управления внешняя тарелка меняет наклон внутренней тарелки и в итоге наклон плоскости вращения несущего винта. В итоге вертолет летит в нужном направлении :-).
Общий шаг винта меняется перемещением по оси винта внутренней тарелки 2 при помощи механизма 7. В этом случае угол установки меняется сразу на обеих лопастях.
Для более лучшего понимания помещаю еще несколько иллюстраций втулки винта с автоматом перекоса. Комментировать их нет смысла :-)…

Втулка винта с автоматом перекоса (схема).

Поворот лопасти в вертикальном шарнире втулки несущего винта.
Изменение общего шага винта, лопасти поворачиваются в осевых шарнирах.
Вот пожалуй и все. Как видите, принципиально все достаточно просто. Конечно в практическом плане автомат перекоса вертолета — агрегат сложный, включающий в себя различные специальные узлы и устройства.

Втулка несущего винта с автоматом перекоса вертолета МИ-2.
В одной из следующих статей мы этого коснемся, а также рассмотрим как же непосредственно управляется вертолет из кабины пилота с использованием автомата перекоса и специальных органов управления.
В заключение я предлагаю вам посмотреть два ролика, которые достаточно наглядно иллюстрируют работу автомата перекоса несущего винта. Полезного просмотра и до новых встреч :-)…
Фотографии кликабельны.
Related posts:
- Как летает вертолет.
avia-simply.ru
Автомат перекоса: принцип работы устройства
Автоматы перекоса позволяют контролировать полет вертолета. Современные модификации выделяются высоким углом наклона по крену и тангажу. Чтобы узнать больше информации об автоматах перекоса, надо рассмотреть существующие устройства.
Автомат перекоса — это специальный механизм, который отвечает за управление винтами вертолета. Также устройства данного типа используются на автожирах и конвертопланах. Стандартный автомат включает в себя набор стоек и опор. Подвижное кольцо устройства крепится в верхней части механизма. Под ним располагается большая тарелка. Подшипники тяги могут находиться над стойкой или втулкой. Хордовые лопасти подсоединены к тарелке. В нижней части модификаций располагаются шарниры крепления. Под ними находится непосредственно ротор.
Принцип работы автоматов перекоса
Принцип действия автомата перекоса построен на изменении положения винтов. Осуществляется данный процесс за счет смены угла наклона опор. Нижнее кольцо отвечает за стабилизацию тяги. Для управления вертолетом по тангажу применяются задние стойки. Угол наклона у них ограничен. Подъемная сила вертолета регулируется при помощи передних стоек. Плавность вращения лопастей обеспечивается сферическими подшипниками. Однако, в данном случае многое зависит от типа модификации.

Самодельные модификации
Сделать автомат перекоса вертолета своими руками довольно сложно. В первую очередь для сборки потребуется широкое кольцо диаметром в 25 см. Шарниры должны находиться в нижней части конструкции. Винты крепятся в тарелке. Для этого придется воспользоваться сварочным аппаратом. Далее, чтобы сделать автомат перекоса вертолета своими руками, заготавливается шаровая опора. Вращающееся кольцо у простых модификаций применяется небольшого диаметра.
Сферические подшипники при этом используются не часто. Циклический шаг лопастей зависит от размеров стойки. После фиксации тарелки можно приступать к установке передних опор. Затем, чтобы собрать автомат перекоса своими руками, применяются шарниры крепления, которые фиксируются под опорной тарелкой. Хордовые лопасти модификации не должны задевать шаровую опору. В среднем угол наклона по тангажу составляет 30 градусов.
Типы автоматов перекосов
В первую очередь разделение автоматов осуществляется по количеству лопастей. Трехлопастные устройства, как правило, устанавливаются с двойными кольцами. Модификации на четыре лопасти считаются более распространенными. Переходные модификации отличаются наличием широких тарелок в нижней части конструкции. Также стоит отметить, что существуют коленчатые модификации и устройства с крыльчаткой. В отдельную категорию выделены ходовые модификации, которые используются на автожирах.
Модификации на три винта
Модели на три винта замечательно подходят для вертолетов. Несущие стойки используются разных размеров. Диаметр нижнего кольца, как правило, составляет не более 22 см. У многих модификаций используется несколько тарелок. Управление по тангажу осуществляется через переднюю тягу. Подшипники сферического типа применяются в автоматах довольно часто.
Непосредственно неподвижная тарелка может устанавливаться под кольцом или над ним. У многих моделей винты крепятся через стойки. Отклонение тарелки в данном случае зависит от размеров боковых стоек. Установочные углы определяются формой тарелки. Втулки чаще всего располагаются в нижней части конструкции. Недостатком устройств на три лопасти считается малый циклический шаг.
Модели на четыре винта
Устройства на четыре лопасти в основном производятся с кулачковым механизмом. У многих модификаций угол наклона по тангажу не превышает 40 градусов. Проблемы с перекосом контролируются несущими винтами. Если верить экспертам, то модификации со сдвоенными втулками встречаются довольно редко. Вращающиеся кольца устанавливаются различных размеров.
Многие специалисты говорят о том, что подшипники сферического типа хорошо себя зарекомендовали. У многих моделей применяется блокировщик для стойки. Таким образом, наклон по крену у автомата сильно ограничен. Проблемы с перекосом модификации не страшны. Устанавливаются модификации в основном через шарниры.

Переходные устройства
Переходные автоматы широко применяются на вертолетах различных производителей. Если верить экспертам, то к преимуществам устройств следует отнести стабильность. Наклон по тангажу регулируется только передними стойками. Если верить специалистам, то тарелки разрешается использоваться небольшого диаметра. Предельный угол наклона по тангажу у модификаций данного типа равняется 35 градусов.
Подшипники у автоматов, как правило, применяются сферического типа. При этом накладки под них встречаются очень редко. Отдельно важно отметить, что существуют модификации под автожиры. Стойки у них применяются вытянутой формы. Тарелки довольно часто фиксируются в верхней части механизма. Циклический шаг лопастей зависит от размеров фиксированного кольца. Блокировка у стойки встречается довольно часто. Над тарелкой находятся втулки, которые защищают лопасти.
Соосные модификации с крыльчаткой
Соосный автомат перекоса с крыльчаткой подходит для конвертопланов. Сила тяги у моделей довольно высокая. Если верить экспертам, то стойки применяются небольшой длины. Установка подшипников осуществляется на тарелки. Модификации с большими переходниками встречаются очень редко. Угол наклона винтов по тангажу, как правило, не превышает 40 градусов. У многих автоматов блокиратор отсутствует. Установка устройств стандартно осуществляется на ротор. В данном случае втулки устанавливаются в два ряда.
Крыльчатки применяются с шарнирными креплениями, которые находятся в нижней части конструкции. По мнению экспертов, тяговая сила модификаций зависит от диаметра тарелок. Циклический шаг лопастей тесно связан с размером стоек, которые находятся по бокам от тарелок с неподвижными кольцами. Подшипники сферического типа у автоматов с крыльчаткой встречаются очень часто. Многие специалисты утверждают, что модификации страдают отклонением тарелки. Наклон по крену в устройствах сильно ограничен.
Коленчатые устройства
Коленчатые модификации у вертолетов встречаются довольно редко. Сила тяги у них, как правило, находится на высоком уровне. Если говорить про недостатки, то важно упомянуть о сложной управляемости механизма при сильных порывах ветра. Если верить мнению экспертов, то несущие винты располагаться должны в верней части модификации. Для решения проблем с уклоном тарелки устанавливается блокиратор. Непосредственно передние стойки фиксируются на тарелки.
Предельный угол наклона по тангажу составляет около 40 градусов. Многие модификации производятся без сферических подшипников. Тарелки применяются с накладками и без них. Модификации с подвижными кольцами встречаются довольно редко. Вращательный момент у тарелок высокий. Стойки за креплением используются небольшой ширины. Внутренние кольца у модификаций данной серии способны выдерживать большие нагрузки. Также стоит отметить, что на рынке представлены модификации с нижним расположением несущих винтов. В таком случае передние стойки применяются небольшой высоты и крепятся под тарелкой.
По словам экспертов, сила подъема у автоматов данной серии довольно высокая. Для современных модификаций они подходят замечательно. Однако недостатки у таких систем также стоит учитывать. В первую очередь — это малый угол по тангажу. На сферические подшипники оказывается большая нагрузка. Наклон по крену максимум достигает 50 градусов. Блокировка стоек используется очень редко. Установка автоматов данного типа осуществляется только на роторы через шарниры.
Ходовые устройства
Ходовые автоматы отчитаются тем, что их можно использовать на вертолетах, а также на конвертопланах. Многие модификации применяются с длинными стойками и широкой тарелкой. Несущие винты, как правило, находятся в верхней части автомата. Наклон по тангажу в данном случае зависит от ширины подвижного кольца. Проблемы с перекосом винтов у модификаций возникают очень редко.
Защитные втулки устанавливаются над переходником. Крепление к ротору происходит только через шарниры. При этом внутренние кольца часто применяются небольшого диаметра. Основная нагрузка у механизмов оказывается именно на стойки. Циклический шаг у лопастей не сильно высокий. Также стоит отметить, что модификации данного типа выделяются качественными блокираторами. Шаровые опоры на автоматах встречаются очень редко.

Модификация Сикорского
Автомат перекоса Сикорского является надежным и отличается прочными стойками. Тарелки в данном случае применяются на 23 см. По мнению экспертов, проблемы с наклоном по тангажу возникают нечасто. Несущие винты у моделей находятся выше уровня тарелок. Установка по вертикали осуществляется очень быстро. Многие специалисты говорят о том, что регулировка по крену происходит очень плавно. Достигнут данный эффект был за счет установки небольших стоек. Предельный угол наклона по тангажу равняется 40 градусов.
Шаровые опоры применяются с накладками. Специалисты говорят, что блокираторы стойки в данном случае работают хорошо. Недостатком модификаций принято считать малый вращающийся момент. Кольца в устройствах изнашиваются довольно быстро. Отдельного внимания у модификаций заслуживают шарниры. Располагаются они в нижней части конструкции. Отклонение тарелок, таким образом, регулируется довольно просто.

Особенности модели серии МИ 8Т
Данный автомат перекоса винта применяется на вертолетах разных серий. Несущие винты у него установлены на уровне кольца. Работа автомата перекоса осуществляется путем смены положения лопастей. Если верить мнению экспертов, то шаровые опоры способны выдерживать большие нагрузки. В данном случае циклический шаг контролируется отлично. Подшипники у автомата применяются сферического типа. Западание подшипников при наклоне происходит редко.
При этом износ у колец очень малый. Отдельного внимания заслуживают компактные шарниры. На ротор модификация устанавливается очень плотно. Круговые движения осуществляются плавно, нагрузка на подшипники распределяется равномерно. Предельный наклон по тангажу равняется 30 градусам. Многие эксперты говорят, что тарелки и при больших оборотах быстро стабилизируются. Отдельно важно отметить, что предельный наклон по крену не превышает 20 градусов.
Параметры модификации серии АВ-1
Представленный автомат перекоса фаз выделяется низкими стойками. Предельный наклон по тангажу в данном случае равняется 50 градусов. Подшипники тяги применяются с накладками. Если верить мнению экспертов, то проблемы с блокировкой стойки возникают очень редко. Тарелка в данном случае установлена на 23 см. Несущие винты у модификации находятся выше уровня тарелки. Втулки в данном случае способны прослужить долгое время.
Отклонение тарелки контролируется на хорошем уровне. Циклический шаг лопасти регулируется только передними стойками. Наклон по крену равняется 30 градусов. Установка по вертикали выполняется довольно быстро. Подшипники сферического типа располагаются только над тарелкой.
Отличия устройств В 912
Автомат перекоса представленной серии выделяется хорошим переходником. Данное устройство относится к кулачковым механизмам. Однако шарниры крепления у модификации находятся в нижней части модификации. Подшипники применяются только на тарелке. Установка лопастей по вертикали много времени не отнимает. Предельный угол наклона по крену равняется 25 градусов. Многие эксперты говорят о том, что устройство обладает отличной стабилизацией. Также стоит отметить, что вращающиеся кольца используются диаметром в 34 см.
Защитные втулки применяются только на передних стойках. Предельный угол наклона по крену не превышает 55 градусов. Проблемы с прекосами этому автомату не страшны. Крепление модификации на ротор стандартно осуществляется через шарниры. Многие специалисты отмечают, что регулировка лопастей по горизонтали происходит очень быстро. Блокировка стойки у модели отсутствует.
Особенности модели серии В 915
Представленный автомат перекоса от прочих модификаций отличается большим наклоном по крену. Относится устройство к коленчатым типам. Несущие винты располагаются на уровне подшипников тяги. Если верить экспертам, то пробелы с перекосом не наблюдаются. При этом защитные втулки находятся под стойкой и над ней. Ходовые лопасти способны выдерживать большие нагрузки.
Шаровые опоры в данном случае применяются с накладками. Предельный угол наклона по тангажу равняется 55 градусов. По словам специалистов, блокиратор работает хорошо. Среди недостатков стоит упомянуть о быстром износе колец. Циклический шаг лопастей регулируется не очень плавно. Крепление у шарниров оставляет желать лучшего. Для конвертопланов модификация данной серии не подходит.
Параметры модификации серии В 920
Представленный автомат перекоса вертолета производится с четырьмя стойками. Вращаются они свободно, предельный угол крена равняется 35 градусов. Несущие винты установлены на уровне подшипникового ряда. Тарелка используется из нержавеющей стали, а ее диаметр равняется 4 см. Многие эксперты говорят о том, что модификация производится с качественными шарнирами крепления, и в установке она довольно проста.
Втулки в данном случае располагаются только над защитным кольцом. Предельный угол наклона по тангажу составляет 50 градусов. Вращающееся кольцо производителем применяется на 30 см. Блокировка стойки у данного автомата отсутствует. Некоторые эксперты говорят о том, что модификация может применяться на автожирах. Также стоит отметить, что у модели установлено две шаровые опоры. Проблемы с прекосом им не страшны.

Отличия устройств V922-04
Данный автомат перекоса вертолета выделяется большой стабилизацией тарелки. Также стоит отметить, что предельный угол наклона по тангажу составляет 45 градусов. Установка лопастей по вертикали много времени не отнимает. Если говорить про недостатки, то важно отметить низкую посадку тарелки. Предельный угол наклона по крену не превышает 50 градусов.
Вращающееся кольцо применяется диаметром в 30 см. Подшипники у автомата используются только сферического типа. Шаровые опоры у модификации отсутствуют. Блокировка стойки стандартно установлена под тарелкой. Подшипники тяги применяются без накладок. Установка лопастей по горизонтали происходит довольно быстро. Отклонение тарелки происходит очень редко. При этом циклический шаг лопастей регулируется без проблем.
Особенности модели МИ 8
Автомат перекоса вертолета МИ 8 имеет массу преимуществ. В первую очередь важно отметить, что модификация относится к переходным устройствам. Несущие винты в данном случае располагаются на уровне втулок. Установка по вертикали занимает довольно много времени. Предельный угол по крену составляет не более 40 градусов. Ходовые лопасти способны выдерживать больше нагрузки. Также стоит отметить, что автомат перекоса МИ 8 делается со сферическими подшипниками. Многие эксперты указывают на низкую прочность опор. При этом тарелка применяется малого диаметра. Отдельного внимания в устройстве заслуживает малый угол наклона по тангажу. Шаровые опоры в данном случае установлены над тарелкой. Крепеж модификации осуществляется через ротор. Крепления в данном случае применяются небольшой ширины. Отклонения тарелки при значительных нагрузках сильно заметны. При подъеме большая нагрузка направляется именно на шаровые опоры.

Параметры модификации серии 8-1950-000
Автомат перекоса 8-1950-000 пользуется большим спросом. Подходит он не только для вертолетов, но и автожиров. Автомат перекоса 8-1950-000 оснащен качественными опорными стойками. Установка лопастей по вертикали происходит быстро. При этом проблемы со стабилизацией тарелки модификации не страшны. Некоторые эксперты также указывают на прочность шарнирных креплений.
Несущие винты у автомата располагаются на уровне блокировки стойки. Шаровые опоры стандартно находятся под кольцом. Если говорить про показатели, то предельный угол наклона по тангажу равняется 35 градусов. Тарелка на автомат перекоса 1950 установлена диаметром в 22 см. Максимальный угол наклона здесь составляет 40 градусов. Циклический шаг лопасти можно регулировать очень плавно.

Отличия устройств 8-1975-000
Это качественный кулачковый автомат перекоса вертолета. Принцип действия устройства построен на изменении угла наклона лопастей. Если говорить про показатели, то диаметр тарелки равняется только 34 см. Несущие винты располагаются на уровне сферических подшипников.
Модификация способна выдерживать большие нагрузки. Однако важно отметить, что максимальный угол по крену не превышает 40 градусов. Блокировка стойки в данном случае отсутствует. Отдельного внимания заслуживает компактная шаровая опора. Проблемы со скручиванием ей не страшны. Установка лопастей по вертикали происходит довольно быстро.
Для регулировки циклического шага лопастей применяются передние опоры. Для конвертопланов модификация этой серии не подходит. Шарнирные крепления у нее находятся под тарелкой. Защитное кольцо у модификации фиксируется на втулке. Накладка на шаровой опоре изнашивается очень медленно. Для автожиров данный автомат перекоса не подходит.
fb.ru
| Наименование изделия: | Шифр | Дата выпуска: | СНЭ |
| Абонентский аппарат | СПУ-7 | — | — |
| Аварийно-спасательный радиомаяк | АРМ-406АС1 | 16.11.18 | 0 |
| Авиагоризонт | LUN 1205.31-8 | 30.10.90 | 0 |
| Авиагоризонт | LUN 1205.31-8 | 31.10.91 | 0 |
| Авиагоризонт | АГ-83-15 | 27.12.18 | 0 |
| Авиагоризонт | АГБ-3К серия 3 | 27.11.18 | 0 |
| Авиационные часы | АЧС-1 | 1987 | 14988 |
| Авиационные часы | АЧС-1М | 28.10.87 | 402 |
| Авиационные часы | АЧС-1М | 25.03.88 | 372 |
| Авиационные часы | АЧС-1М | 25.03.88 | 410 |
| Авиационные часы | АЧС-1М | 25.03.88 | 359 |
| Авиационные часы | АЧС-1М | 10.12.87 | 370 |
| Автомат давления | АД-50 | 26.04.18 | 0 |
| Автомат давления | АД-50 | 27.04.18 | 0 |
| Автомат защиты | АЗП-1СД | 06.09.85 | 19694 |
| Автомат защиты | АЗП-А2 | 30.04.85 | 18194 |
| Автомат защиты | АЗП-А2 | 19.01.90 | 11858 |
| Автомат защиты | АЗП-А2 | 20.06.91 | 0 |
| Автомат защиты | АЗП-А2 | 29.06.91 | 0 |
| Автомат защиты | АЗП-А2 | 17.03.92 | 0 |
| Автомат защиты | АЗП-А2 | 17.04.92 | 0 |
| Автомат защиты | АЗС-2,5 | — | — |
| Автомат защиты | АЗС-40 | — | — |
| Автомат перекоса | 8-1950-000 | 11.10.12 | 74 |
| Автомат перекоса | 8-1950-000 | 28.09.18 | 0 |
| Автомат перекоса | 8-1960-000 | 11.07.17 | 0 |
| Автомат пуска | АПД-78А | 11.03.09 | 0 |
| Автомат пуска | АПД-78А | 30.04.09 | 0 |
| Автомат пуска | АПД-78А | 30.01.16 | 0 |
| Автомат пуска | АПД-30БТ | 20.11.18 | 0 |
| Автомат разгрузки насоса | ГА77В | 17.03.87 | 3999 |
| Автомат разгрузки насоса | ГА77В | 17.01.89 | 3998 |
| Автомат разгрузки насоса | ГА77В | 28.02.18 | 0 |
| Автомат разгрузки насоса | ГА77В | 24.09.18 | 0 |
| Автомат разгрузки насоса | ГА-77В | 1987 | 15321 |
| Автомат разгрузки насоса | ГА-77В | 1988 | 14607 |
| Автомат согласования | АС-1 | 1981 | 21840 |
| Автоматический переносной радиомаяк | АРМ-406П | 15.11.18 | 0 |
| Автопилот | АП-34Б сер. 2 | 13.12.18 | 0 |
| Автопилот | АП-34Б сер. 2 | 14.12.18 | 0 |
| Агрегат зажигания | СК-22-2М | 18.09.17 | 0 |
| Агрегат зажигания | СКНА-22-2А | 28.05.84 | 19045 |
| Агрегат зажигания | СКНА-22-2А | 29.05.84 | 19045 |
| Агрегат зажигания | СКНА-22-2А | 03.03.16 | 0 |
| Агрегат управления | 6С2.399.000 серия3 | 06.04.16 | 0 |
| Агрегат управления | 6С2.399.000 серия3 | 28.03.16 | 0 |
| Агрегат управления | 6С2.399.000 сер.3 | 21.11.18 | 0 |
| Акселерометр однокомпонентный компенсационный | АДИС-2-3 | 12.12.18 | 0 |
| Амортизатор | B557319N | 06.03.13 | 0 |
| Амортизатор основного шасси (левый) | 8А-4101-00Б-2 | 15.12.18 | 0 |
| Амортизатор основного шасси (правое) | 8А-4101-00Б | 14.12.89 | 11475 |
| Амортизатор хвостовой опоры | В24-4301-100-7 | — | — |
| Амортизатор хвостовой опоры | В24-4301-100-7 | 1980 | 18546 |
| Амортизационная рама | Б10Б- Яр1 | 01.09.88 | 12331 |
| Амортизационная рама | Б10В-Яр1 | 28.02.87 | 578 |
| Амортизационная рама | Б10В-Яр1 | 15.06.87 | 0 |
| Амортизационная рама | Б10В-Яр1 | 14.09.87 | 0 |
| Амортизационная рама (от ЯДРО-1) | Б10В-Яр1 | 01.01.90 | 0 |
| Амперметр | А-2 | 1985 | 19675 |
| Амперметр | А-2 | 1985 | 19675 |
| Амперметр | А-2 | 06.12.85 | 19679 |
| Амперметр | А-3 | 1985 | 19675 |
| Амперметр | А-3 | 30.12.85 | 1861 |
| Амперметр | АФ-1 | 1985 | 19675 |
| Антенна | 13-3А | — | — |
| Антенна | АШС-1 | 1987 | 12926 |
| Антенна самолетная широкополосная | АШС-1 | 1990 | 12475 |
| Антенна самолетная широкополосная | АШС-1 | 1992 | 9842 |
| Аппаратура контроля вибрации | ИВ-500Е серия2 | 26.04.16 | 0 |
| Бак дополнительный | 8АТ-6117-00 | 1985 | 17172 |
| Бак топливный | 8ТВ.6101.500 | 01.01.13 | 0 |
| Батарейка резервного авиагоризонта | 9015607 | 13.08.18 | 0 |
| Батарея | Прибой-2С | 30.03.18 | 0 |
| Батарея аккумуляторная свинцовая авиационная | 12-САМ-28П | 20.02.18 | 0 |
| Блок | Б1 -ЯР2-1А | 31.01.89 | 15607 |
| Блок | Б10В-Яр1 | 04.06.86 | 792 |
| Блок | Б10В-Яр1 | 01.09.87 | 0 |
| Блок | Б18 Яр1 | 28.08.84 | 19856 |
| Блок | Б18-Яр1 | 05.09.86 | 10431 |
| Блок | Б1-ЯрII-1А | 15.05.87 | 6661 |
| Блок | Б1-ЯрII-1А | 01.07.89 | 2982 |
| Блок | Б5А -Яр1 | — | — |
| Блок | Б5-Яр1 | 04.06.86 | 792 |
| Блок | Б5-Яр1 | 28.02.87 | 578 |
| Блок | Б7А2-Яр1 | 04.06.86 | 792 |
| Блок | БТТ30БТА | 29.07.13 | 0 |
| Блок | КС-05 | — | — |
| Блок | ПУЛ-150 | — | — |
| Блок | Б5-Яр1 | 30.08.83 | 8768 |
| Блок (от ЯДРО-1) | Б5-Яр1 | 01.01.87 | 439 |
| Блок (от ЯДРО-1) | Б5-Яр1 | 31.05.90 | 0 |
| Блок автономного питания | АРМ-043 | 01.11.18 | 0 |
| Блок автономного питания | АРМ-043 | 29.11.18 | 0 |
| Блок автономного питания | АРМ-043-01 | 31.08.17 | 0 |
| Блок автономного питания | АРМ-043-01 | 28.11.17 | 0 |
| Блок бортового речевого регистратора | ПИЛТ.467542.002 (ББРР) | 01.04.16 | 94,35 |
| Блок исполнительный | ССП-ФК-БИ серия 2 | 19.09.87 | 0 |
| Блок исполнительный | ССП-ФК-БИ серия 2 | 24.09.88 | 0 |
| Блок коммутации | БК-7 | 08.08.11 | 0 |
| Блок контроля кренов | БКК-18 | 27.12.18 | 0 |
| Блок направленной антенны | БНА АРК-9 | — | — |
| Блок направленной антенны | БНА АРК-9 | — | — |
| Блок преобразования кода | БлПК1 | 15.03.17 | 0 |
| Блок преобразования параметров | БПП1-1 серия1 | 15.04.15 | 0 |
| Блок Р-802 | 3Г (Р-802) | 1987 | 16846 |
| Блок радиаторов воздушно-масляных (левый) | 5349Т | 07.09.18 | 0 |
| Блок радиаторов воздушно-масляных (правый) | 5349Т | 07.09.18 | 0 |
| Блок радиаторов воздушно-масляных (правый) | 5349Т | 10.09.18 | 0 |
| Блок речевых сообщений | РИ-65-10 | 18.09.86 | 2623 |
| Блок связи | БС-1 | 29.10.15 | 0 |
| Блок связи | БС-1 | 22.11.18 | 0 |
| Блок связи | БС-34-1 | 29.01.84 | 18956 |
| Блок связи | БС-34-1 | 20.05.16 | 0 |
| Блок связи | БС-1 | 14.06.90 | 0 |
| Блок связи | БС-1 | 09.01.92 | 0 |
| Блок сигнала готовности | БСГ | 26.06.85 | 19694 |
| Блок следящей системы | БСС-4-01 | 29.10.16 | 0 |
| Блок согласующий | БС4-01 | 02.11.18 | 0 |
| Блок сравнения и предельного крена | БСПК-1 | 09.09.93 | 6997 |
| Блок сравнения и предельного крена | БСПК-1 | 03.04.18 | 0 |
| Блок считывания данных | БСД (ПИЛТ.467278.003-01) | 29.01.18 | 0 |
| Блок считывания данных | БСД (ПИЛТ.467278.003-01) | 13.02.18 | 0 |
| Блок уведомляющих сигналов | БУ-1 | 20.04.07 | 23 |
| Блок уведомляющих сигналов | БУ-1 | 08.08.11 | 0 |
| Блок уведомляющих сигналов | БУ-1 | 02.12.16 | 0 |
| Блок управления | БУ-32-1 сер.2 | 20.06.16 | 0 |
| Блок управления | БУ-32-1 сер.2 | 29.07.16 | 0 |
| Блок управления регулятора температуры | 4087-3С | 20.12.18 | 0 |
| Блок усилителей навигационно-пилотажного прибора | БУНПП-В серия 1 (1479-В) | 30.10.84 | 19694 |
| Блок усилителей навигационно-пилотажного прибора | БУНПП-В серия 1 (1479-В) | 25.06.15 | 0 |
| Блок усилителей навигационно-пилотажного прибора | БУНПП-В серия 1 (1479-В) | 28.09.15 | 0 |
| Блок усилителей навигационно-пилотажного прибора | БУНПП-В серия 1 (1479-В) | 27.10.15 | 0 |
| Блок усилителя мощности | Б4-Яр1 | 04.06.86 | 792 |
| Блок фильтров | БФ-34 партия А | 16.02.85 | 19677 |
| Блок электромагнитных клапнов ППС | 781100 | 09.08.84 | 21311 |
| Блок электромагнитных клапнов ППС | 781100 | 31.08.92 | 7819 |
| Блок электронный | БЭ-9Е серия2 | 26.04.16 | 0 |
| Болт | 3003А-6-36-3КД | 26.07.18 | 0 |
| Болт | 8-1910-059У | — | 0 |
| Болт | 8А-5104-317-7 | 18.03.14 | 0 |
| Болт | 8А-5104-317-9 | 19.06.13 | 0 |
| Болт | 8А-5104-319-3 | 30.06.15 | 0 |
| Болт | 8А-5104-319-5 | 12.03.18 | 0 |
| Болт | 8АТ.5104.321 | 11.04.18 | 0 |
| Болт | M8x27-ONL3120.14 | 06.03.13 | 0 |
| Болт | M8x33-ONL3120.14 | 06.03.13 | 0 |
| Бортовая аппаратура речевых сообщений | РИ-65-Б | 30.11.84 | 5565 |
| Бортовая стрела | 8АТ.9650.300 | 26.04.16 | 0 |
| Быстрозакрывающийся замок | B590631N | 06.03.13 | 0 |
| Вариометр мембранный | ВР-10МК | 1986 | 19654 |
| Вариометр мембранный | ВР-10МК | 05.07.85 | 15555 |
| Вариометр мембранный | ВР-10МК серия 4 | 17.06.16 | 0 |
| Вариометр мембранный | ВР-10МК серия 4 | 01.02.17 | 0 |
| Вентилятор осевой | 2438 | 29.09.90 | 0 |
| Вентилятор осевой | 2438 | 28.04.90 | 0 |
| Вертолет RA-24412 | МИ-8Т | 21.03.86 | 19675 |
| Винт | B081016N | 06.03.13 | 0 |
| Винт рулевой | 246-3901-000 | — | — |
| Винт рулевой | 246-3904-000 серия 01 | — | — |
| Винт рулевой | 8-3904-000 | — | — |
| Винт рулевой | 8-3904-000 | — | — |
| Винт рулевой | 246-3901-000 | — | — |
| Винт рулевой | 246-3901-000 | — | — |
| Винт рулевой | 246-3904-000 | — | — |
| Винт рулевой (МИ-2) | 50.39.000.00.04 | — | — |
| Вольтметр | В-1 | 14.04.86 | 15446 |
| Вольтметр | ВФ-0,4 | — | — |
| Втулка | 8АТ-7210-00-03 | 01.11.17 | 0 |
| Втулка | 1.7601.4124.001.000 | 28.12.18 | 0 |
| Втулка | 1.7601.4226.002.000 | 28.12.18 | 0 |
| Втулка | 1.7601.4226.004.000 | 28.12.18 | 0 |
| Втулка | 1.7601.4227.003.000 | 28.12.18 | 0 |
| Втулка несущего винта | 8-1930-000 сер. 02 | 24.11.87 | 3231 |
| Втулка несущего винта | 8-1930-000 сер. 02 | 29.05.91 | 2988 |
| Втулка несущего винта | 8-1930-000 сер.02 | 01.10.88 | 5755 |
| Входной трап | 8АТ-0386-00 | — | — |
| Выключатель коррекции | ВК-53Э-РВ | 22.08.84 | 9817 |
| Выключатель коррекции | ВК-53Э-РВ | 27.11.15 | 0 |
| Выносное сопротивление | ВС-25ТВ | 04.08.15 | 0 |
| Выпрямительное устройство | ВУ-6А | 04.12.91 | 0 |
| Высотомер двухстрелочный | ВД-10К серия 2 | 11.10.90 | 9273 |
| Высотомер двухстрелочный | ВД-10К серия 2 | 29.02.92 | 0 |
| Гайка | 3327А-6КД | 26.07.18 | 0 |
| Гайка | 5-Ц-ОСТ 1 33018-80 | — | 0 |
| Гайка | B159550N | 22.09.14 | 0 |
| Гайка корпуса ОШ | 8-1932-330сб | 2013 | 0 |
| Гайка корпуса ОШ | 8-1932-330сб | 2013 | 0 |
| Гайка самоконтрящаяся | AN6289D4 | 2015 | 0 |
| Гарнитура со средней шумозащитой | ГСШ-А-18Э | 20.07.18 | 0 |
| Гаситель вибрации | 8АТ-1250-00 | 09.04.14 | 0 |
| Генератор | ГС-18МО | 23.05.88 | 885 |
| Генератор | ГС-18МО | 21.07.87 | 2433 |
| Генератор | СГО-30У сер.4 | 21.12.89 | 9846 |
| Генератор | СГО-30У серия4 | — | 0 |
| Генератор | СГО-30У серия4 | — | 0 |
| Генератор | СГО-30У серия4 | 18.12.87 | 0 |
| Гибкий вал ГО16 | 018-1632-00 (ГО16) | 26.09.13 | 0 |
| Гидроаккумулятор | 5301-370/001 | — | — |
| Гидроаккумулятор | 5301-370/002 | — | — |
| Гидроаккумулятор | 8А-5303-10/2 | 29.06.90 | 13906 |
| Гидроаккумулятор | 8А.5301.370.001 | 23.08.13 | 0 |
| Гидробак | 8АТ-5302-00 | 1986 | 10325 |
| Гидроцилиндр | 8АТ-5103-550 | — | — |
| Гироагрегат | ГА-6 | 14.02.86 | 10296 |
| Гироагрегат | ГА-6 | 24.02.16 | 0 |
| Гироагрегат | ГА-6 | 03.03.16 | 0 |
| Гироагрегат | ГА-6 | 03.03.16 | 0 |
| Главный редуктор | ВР-8А | 20.06.73 | 3824 |
| Главный редуктор | ВР-8А | 19.12.84 | 9206 |
| Головка-затвор | ГЗСМ | 29.09.17 | 0 |
| Группа щеточная электрических машин (8АТ-7411) | 555.120 | 27.12.16 | 0 |
| Группа щеточная электрических машин (Д-70Т) | 555.219 | 02.02.16 | 0 |
| Группа щеточная электрических машин (ДВ-3,ДВ-302Т(ТА), ДВ-308Т (ТА) | 995.208 | 28.01.16 | 0 |
| Группа щёточная электрических машин (МВ-1200) | 555.214 | 14.05.18 | 0 |
| Группа щеточная электрических машин (ПО-500А) | 555.112 | 28.01.16 | 0 |
| Группа щеточная электрических машин (ПО-500А) | 555.113 | 28.01.16 | 0 |
| Группа щеточная электрических машин (СГО-30У-4с) | 555.126 | 28.05.18 | 0 |
| Группа щеточная электрических машин (СГО-30У-4с, СГС-40П, ПУ-2) | 555.127 | 28.05.18 | 0 |
| Группа щеточная электрических машин (ЭПК2УТ-60) | 555.220 | 08.02.16 | 0 |
| Группы щеточные электрических машин | 555.162 | 21.09.18 | 0 |
| Группы щеточные электрических машин | 6Б5.593.006 | 22.11.17 | 0 |
| Группы щеточные электрических машин | 6Б5.593.034 | 20.08.15 | 0 |
| Группы щеточные электрических машин | 8А5.593.088 | 21.12.17 | 0 |
| Датчик | ДПС | 19.09.87 | 0 |
| Датчик | ДПС | 24.09.88 | 0 |
| Датчик | ДПС | 23.09.15 | 0 |
| Датчик | ДПС | 20.04.18 | 0 |
| Датчик | СКЭС-2027Б бак ПЛ | 28.06.91 | 7846 |
| Датчик | СКЭС-2027Б бак ППР | 28.06.91 | 7846 |
| Датчик | СКЭС-2027Б бак Р | 28.06.91 | 7846 |
| Датчик | УЗП | 28.09.81 | 24221 |
| Датчик | УЗП серии 2 | 1983 | 21297 |
| Датчик | УЗП серии 2 | 30.06.14 | 0 |
| Датчик высоты | ДВ-15МВ | 1985 | 10660 |
| Датчик высоты | ДВ-15МВ | 29.04.87 | 13847 |
| Датчик высоты | ДВ-15МВ серия 2 | 16.11.17 | 0 |
| Датчик высоты | ДВ-15МВ серия2 | 27.12.89 | 0 |
| Датчик давления индуктивный | ИД-100 | 18.02.82 | 22561 |
| Датчик давления индуктивный | ИД-100 | 28.03.16 | 0 |
| Датчик индукционный | ИД-3 | 29.11.84 | 15136 |
| Датчик индукционный | ИД-3 | 25.12.17 | 0 |
| Датчик инерционный | УА28А-13 | 04.10.18 | 0 |
| Датчик инерционный | УА28А-14 | 04.10.18 | 0 |
| Датчик перегрузок | МП-95 (-1+3) | 30.11.17 | 0 |
| Датчик перегрузок | МП-95 (от -1,5 до +1,5) | 30.04.17 | 0 |
| Датчик пожарной сигнализации | ДПС-1АГ | 24.06.79 | 0 |
| Датчик позывных | МЧ-64Б | 17.04.86 | 18346 |
| Датчик приборной скорости | ДАС | 29.10.88 | 10861 |
| Датчик приборной скорости | ДАС | 06.06.91 | 0 |
| Датчик пьезоэлектрический с кабелем | МВ-03-1 | 11.12.18 | 0 |
| Датчик сельсинный | ДС-11 | 19.12.17 | 0 |
| Датчик сигнализации льда | ДСЛ-40Т | 01.10.18 | 0 |
| Датчик тахометра | ДТЭ-1 | 31.07.92 | 0 |
| Датчик угловой скорости | ДУС 1209К | 10.09.18 | 0 |
| Датчик угловой скорости тангажа | ДУС 1209Е | 27.05.89 | 9346 |
| Датчик угловой скорости тангажа | ДУС 1209Е | 06.04.16 | 0 |
| Датчик угловой скорсти тангажа | ДУС 1209ЕЭ | 19.08.15 | 0 |
| Датчик уголовой скорости крена | ДУС 1209Г | 21.06.89 | 9346 |
| Датчик уголовой скорости направления | ДУС 1209К | 11.07.86 | 9346 |
| Датчик электрического авиационного керосиномера | СКЭС-2027А бак Р | 19.12.89 | 5889 |
| Датчик электрического авиационного керосиномера | СКЭС-2027Б бак ПЛ | 26.02.91 | 0 |
| Датчик электрического авиационного керосиномера | СКЭС-2027Б бак ППР | 26.02.91 | 0 |
| Дверца | B135022N | 06.03.13 | 0 |
| Двигатель | Д-60Г | 01.01.96 | 0 |
| Двигатель | ТВ2-117А | — | 6824 |
| Двигатель | ТВ3-117ВМ сер.02 | 1978 | 2875 |
| Двигатель | ТВ3-117ВМ сер.02 | 21.08.93 | 753 |
| Двигатель | ТВ2-117А | 03.02.75 | 4961 |
| Двигатель | ТВ2-117А | 21.11.78 | 8706 |
| Двигатель | ТВ2-117АГ | 14.12.73 | 9568 |
| Двухпозиционный кран с электромагнитным управлением | ГА74М/5 | 20.10.89 | 0 |
| Двухпозиционный кран с электромагнитным управлением | ГА74М/5 | 20.05.91 | 6955 |
| Двухпозиционный кран с электромагнитным управлением | ГА74М/5 | 20.03.09 | 677 |
| Детали забустерной части управления | 8АМТ-5104-200-3-Д | 08.05.18 | 0 |
| Детали забустерной части управления | 8АМТ-5104-200-3-Д | 07.05.18 | 0 |
| Диафрагма | 15-5303-10-6 | 26.09.18 | 0 |
| Дифференциальное реле | ДМР-200Д | 26.12.18 | 0 |
| Дозатор | ГА-172-00-2Т | 02.04.85 | 17262 |
| Дозатор | ГА-172-00-2Т | 02.04.85 | 18222 |
| Дополнительная переговорная точка | СПУ-7 | — | — |
| Дополнительный бак | 8АТ-6117-00 | 1987 | 11903 |
| Задатчик приборной скорости | КЗСП | 13.10.82 | 7932 |
| Задатчик температуры | 2400В | 06.03.18 | 0 |
| Задвижка регулирующая | 3161 | 24.03.04 | 0 |
| Зажим | B091760N | 06.03.13 | 0 |
| Заклепка | 4x8ONL3355.1 | 2016 | 0 |
| Замок внешней подвески | ДГ-64М | 1991 | 8148 |
| Замок подвески | ДГ-64М | 01.01.85 | 4848 |
| Заслонка регулирующая | 1919Т | 05.05.91 | 6265 |
| Заслонка регулирующая | 1919Т | 11.07.18 | 0 |
| Защитная вставка | FAB1331 | 06.03.13 | 0 |
| Измеритель | ИТК-5 | 24.01.83 | 17966 |
| Измеритель | ИТК-5 | 29.09.90 | 10846 |
| Измеритель | ИТК-5 | 07.07.93 | 0 |
| Измеритель режимов | ИР-117М | 31.10.16 | 0 |
| Измеритель температуры газов | ИТГ-1 | 09.04.84 | 18075 |
| Измеритель температуры газов | ИТГ-1 | 02.02.90 | 13284 |
| Измеритель термометра | ТУЭ-48 | 1980 | 20300 |
| Измеритель электрического термометра воздуха | ТВ-1 | 18.03.85 | 19694 |
| Измерительный комплекс давления | ИКД27ДА-220-780 | 19.05.17 | 0 |
| Имитатор датчика поплавкового | ИДП1 | 28.09.94 | 0 |
| Импульсатор питания | И-2 | 01.08.85 | 19694 |
| Индикатор | ИСТ-2 | 04.03.14 | 0 |
| Индикатор нулевой | ИН4 | 20.05.86 | 12926 |
| Индикатор нулевой | ИН-4 | 27.06.84 | 16843 |
| Индикатор нулевой | ИН4 | 21.01.16 | 0 |
| Индикатор положения подвижных элементов самолета | ИП21-15 | 09.10.18 | 0 |
| Индикатор тахометра | ИТЭ-1 | 31.08.83 | 14783 |
| Индикатор тахометра | ИТЭ-1 | 31.10.86 | 1861 |
| Индикатор тахометра | ИТЭ-1 | 27.09.18 | 0 |
| Индукционный датчик | ИД-100 | 1982 | 19927 |
| Индукционный датчик | ИД-8 | 1986 | 19424 |
| Кабель | 300-277 | 03.05.17 | 0 |
| Кабель противообледенительной системы воздушного винта AV-725 | 300-315-А | 15.03.18 | 0 |
| Калорифер | СБ. 2437-2-2 | — | 0 |
| Карданный вал привода вентилятора | 8А-6314-00 | 08.12.89 | 8332 |
| Карданный вал привода вентилятора | 8А-6314-00 | 25.12.14 | 0 |
| Кассета | 7-К-991 (ЭКСР-46) | 26.11.85 | 19694 |
| Качалка | 8МТ.5104.210 | 13.04.15 | 0 |
| Клапан обратный для воздуха | 636100М | 28.03.18 | 0 |
| Клапан редукционный | У139А | 31.03.91 | 0 |
| Клапан редукционный | У139А | 27.09.91 | 0 |
| Клапан редукционный | УП25/2 | 03.10.18 | 0 |
| Клапан электромагнитный | МКТ-210А | 14.09.17 | 0 |
| Клеммные колодки | 74КУ | — | 0 |
| Колба | SM16 | 16.04.15 | 0 |
| Колба | SM24 | 12.02.16 | 0 |
| Колба | SM28-20 | 06.03.13 | 0 |
| Колба | SM28-70 | 06.03.13 | 0 |
| Колба | SM36 | 19.06.14 | 0 |
| Колба | SM37 | 22.09.14 | 0 |
| Колба | Tesia 28V 2W | 07.02.14 | 0 |
| Колесо нетормозное под шину размера 595х185 | К2116 | 11.04.18 | 0 |
| Колесо под шину размера 865*280 | КТ97-310 | 02.07.18 | 0 |
| Колесо под шину размера 865*280 | КТ97-310 | 22.08.18 | 0 |
| Колесо под шину размера 865*280 | КТ97-310 | 06.09.18 | 0 |
| Колесо под шину размера 865*280 | КТ97-310 | 20.09.18 | 0 |
| Колодка переходная | ПК-6 | 15.06.15 | 0 |
| Кольцо | AS3209-132 | 2015 | 0 |
| Кольцо | M83248-1-024 | 2015 | 0 |
| Комбинированный агрегат управления | КАУ-30 |
tehclub.ru
автомат перекоса несущего винта вертолета — патент РФ 2088479
Сущность изобретения: автомат перекоса содержит вращающееся кольцо с тягами поворота лопастей, соединенное шлиц-шарниром с приводным валом от редуктора, невращающееся кольцо с шарнирно присоединенными к нему тягами продольного и поперечного управления и связанное подшипником с вращающимся кольцом, тягу управления общим шагом несущего винта, рамку, соединенную двумя сферическими подшипниками с невращающимся кольцом. Автомат перекоса дополнительно снабжен двуплечим рычагом, шарнирно закрепленным на корпусе редуктора, причем одно плечо рычага шарнирно соединено с тягой управления общим шагом винта, а другое плечо соединено с рамкой двумя сферическими подшипниками, центры которых расположены на оси, проходящей через центр вала несущего винта, при этом ось ортогональна другой оси, проходящей через центры сферических подшипников, соединяющих рамку с невращающимся кольцом и параллельна оси поворота рычага в шарнире, а присоединенные к невращающемуся кольцу тяги продольного и поперечного управления расположены по разные стороны от тяги управления общим шагом. 2 ил. Изобретение относится к авиации, а именно к конструкции автомата перекоса несущего винта вертолета. Известна конструкция автомата перекоса, используемая на вертолетах Ми-6, Ми-8 и др. включающая вращающуюся тарелку, тяги управления лопастями, шлиц-шарнир, поводок тарелки, соединяющий ее с приводным валом, невращающуюся тарелку, соединенную через карданный вал с ползуном, установленным подвижно на направляющей, выполненной на корпусе редуктора, тяги поворота лопастей, качалки продольного и поперечного управления и рычаг общего шага (Данилов В.А. Вертолет Ми-8, Транспорт, 1988, 159-164). Наиболее близким аналогом изобретения является устройство автомата перекоса несущего винта вертолета, который содержит вращающееся кольцо с тягами поворота лопастей, соединенное шлиц-шарниром с приводом вала от редуктора, невращающееся кольцо с шарнирно присоединенными к нему тягами продольного и поперечного управления, связанное подшипником с вращающимся кольцом, тягу управления общим шагом несущего винта, рамку, соединенную двумя сферическими подшипниками с невращающимся кольцом (FR, патент, N 2661886, B 64 C 27/605, 1991). Особенностью такой схемы автомата перекоса является большой диаметр подшипника, соединяющего вращающееся кольцо с невращающимся, в связи с требованиями к сборке направляющей и размещением шарниров и эластомерных блоков между ползуном и невращающимся кольцом. Изобретение направлено на создание компактной и надежной схемы автомата перекоса. Это достигается тем, что автомат перекоса несущего винта вертолета, содержащий вращающееся кольцо с тягами поворота лопастей, соединенное шлиц-шарниром с приводным валом от редуктора, невращающееся кольцо с шарнирно присоединенными к нему тягами продольного и поперечного управления и связанное подшипником с вращающимся кольцом, тягу управления общим шагом несущего винта, рамку, соединенную двумя сферическими подшипниками с невращающимся кольцом, согласно изобретению снабжен двуплечим рычагом, шарнирно закрепленным на корпусе редуктора, причем одно плечо рычага шарнирно соединено с тягой управления общим шагом винта, а другое плечо соединено с рамкой двумя сферическими подшипниками, центры которых расположены на оси, проходящей через центр вала несущего винта, при этом ось ортогональна другой оси, проходящей через центры сферических подшипников, соединяющих рамку с невращающимся кольцом, и параллельна оси поворота рычага в шарнире, а присоединенные к невращающемуся кольцу тяги продольного и поперечного управления расположены по разные стороны от тяги управления общим шагом. Такое выполнение автомата перекоса позволяет получить компактную компоновку агрегата в сочетании с элементами системы управления и редуктором, снизить вес и повысить надежность вертолета в целом. На фиг. 1 показан автомат перекоса несущего винта вертолета; на фиг.2 — сечение А-А на фиг.1. Вращающееся кольцо 1 с шарнирно закрепленными тягами 2 управления лопастями несущего винта и шлиц-шарниром 3 на радиально упорном подшипнике 4 установлены на невращающемся кольце 5. Поводок шлиц-шарнира 3 жестко зафиксирован с валом 6 редуктора. На невращающемся кольце 5 при помощи пальцев 7 и 8 и сферических подшипников 9 и 10 подвешена рамка 11. Точки пересечения осей пальцев 7 и 8 с соответствующими центрами сферических подшипников 9 и 10 обозначены точками «Г» и «Д». На рамке 11 при помощи пальцев 12 и 13 и сферических подшипников 14 и 15 в точках «К» и «М» закреплен рычаг 16. Этот рычаг с помощью пальца 17 установлен на кронштейне 18 в цилиндрических подшипниках 19 и 20 и упорных подшипниках 21 и 22, а кронштейн 18 жестко установлен на корпусе редуктора 23. Рычаг 16 выполнен двуплечим и его второе плечо шарнирно соединено с тягой управления общим шагом 24. Тяги продольного и поперечного управления 21 и 26 шарнирно присоединены к невращающемуся кольцу 5 по разные стороны относительно тяги управления общим шагом 24. Наличие сферических подшипников 9, 10, 14 и 15 обеспечивает поворот вращающегося кольца по сфере, что необходимо для нормальной работы системы управления вертолетом. При этом ось, проходящая через центры сферических подшипников 9 и 10 «Г» и «Д», и ось, проходящая через центры сферических подшипников 14 и 15 «К» и «М», взаимно перпендикулярны, а расположение рамки 11 и рычага 16, предназначенных для управления общим шагом и удержания невращающегося кольца от смещения и поворота относительно оси приводного вала, произвольно относительно плоскости продольного и поперечного управления автомата перекоса и не связано с углом упреждения управления. Ось поворота рычага 16 параллельна оси, проходящей через точки «К» и «М». Устройство работает следующим образом. Циклическое управления осуществляется наклоном вращающегося кольца 1 тягами управления 25 и 26 относительно двух осей путем перемещения точек «А» и «В». При этом происходит поворот вращающегося кольца 1 и невращающегося кольца 5 в сферических подшипниках 9 и 10 относительно рамки 11 и рамки 11 совместно с вращающимся кольцом 1 и невращающимся кольцом 5 в сферических подшипниках 14 и 15 относительно рычага 16. Управление общим шагом осуществляется перемещением точки «П» рычага 16 тягой управления общего шага 24. Поскольку рычаг 16 шарнирно установлен на кронштейне 18, жестко закрепленном на корпусе редуктора 13, вращающееся кольцо 5 смещается и поворачивается по радиусу «R» относительно оси, проходящей через ось кронштейна 18, и смещается от оси вала 6 на незначительную величину. При совместном циклическом управлении и управлении общим шагом осуществляется одновременное перемещение точек «A», «B» и «П». При этом происходит одновременно наклон и перемещение неподвижного кольца 5 и вращающегося кольца 1.ФОРМУЛА ИЗОБРЕТЕНИЯ
Автомат перекоса несущего винта вертолета, содержащий вращающееся кольцо с тягами поворота лопастей, соединенное шлиц-шарниром с приводным валом от редуктора, невращающееся кольцо с шарнирно присоединенными к нему тягами продольного и поперечного управления и связанное подшипником с вращающимся кольцом, тягу управления общим шагом несущего винта, рамку, соединенную двумя сферическими подшипниками с невращающимся кольцом, отличающийся тем, что он снабжен двуплечим рычагом, шарнирно закрепленным на корпусе редуктора, причем одно плечо рычага шарнирно соединено с тягой управления общим шагом винта, а другое плечо соединено с рамкой двумя сферическими подшипниками, центры которых расположены на оси, проходящей через центр вала несущего винта, при этом ось ортогональна другой оси, проходящей через центры сферических подшипников, соединяющих рамку с невращающимся кольцом, и параллельна оси поворота рычага в шарнире, а присоединенные к невращающемуся кольцу тяги продольного и поперечного управления расположены по разные стороны от тяги управления общим шагом.www.freepatent.ru
| Наименование | Передаточное отношение | Частота вращения вала, об/мин | Передаваемые N/ Мкр | Вес, кг | Базовый тип вертолета |
|---|---|---|---|---|---|
| Промежуточный редуктор 8А-1515-000 |
1 | 2575 | 184 кВт max 442 кВт |
24,4 | Ми-8, Ми-8МТ/17, Ми-8АМТ/171, Ми-8МТВ/172, Ми-14, Ми-24/25/35 |
| Хвостовой редуктор 246-1517-000 |
0,4318 | n1=2575 n2=1112 |
184 кВт max 442 кВт |
58,7 | Ми-8, Ми-8МТ/17, Ми-8АМТ/171, Ми-8МТВ/172, Ми-14, Ми-24/25/35 |
| Автомат перекоса 8-1950-000 |
— | 192 | — | 122 | Ми-8, Ми-8МТ/17, Ми-8АМТ/171, Ми-8МТВ/172, Ми-14 |
| Автомат перекоса 24-1940-000 |
— | 192 | — | 122 | Ми-24/25/35 и модификации |
| Хвостовой вал 8А-1516-000 |
— | 2589 | Мкр.=575 н.м. Мкр.max=1380 н.м. |
57 | Ми-8, Ми-8МТ/17, Ми-8АМТ/171, Ми-8МТВ/172, Ми-14 |
| Хвостовой вал 24-1526-000 |
— | n1=3237 n2=2575 |
Мкр.1=930 н.м. Мкр.max1=1425 н.м. Мкр.2=905 н.м. Мкр.max2=1530 н.м. |
49,7 | Ми-24/25/35 |
| Коробка приводов 24-1512-000 сер.2 |
0,795 1,857 |
n1=3237 n2=2575 n3=6011 |
53,7х2 кВт 1,8 кВт потребляемая |
51,3 | Ми-24/25/35 |
| Промежуточный редуктор 90-1515-000 |
1 | 2685 | 1272 кВт max 2868 кВт |
135 | Ми-26 |
| Хвостовой редуктор 90-1517-000 |
4,848 | n1=2685 n2=554 |
1272 кВт max 2868 кВт |
348,5 | Ми-26 |
koavia.com
Управление вертолетом. | АВИАЦИЯ, ПОНЯТНАЯ ВСЕМ.
Здравствуйте!

Взлет МИ-8 в зоне воздушной подушки.
Мы с Вами уже выяснили как, в принципе, управляется вертолет, и как работает автомат перекоса. А сегодня внесем некоторую ясность в вопрос о том, какую роль во всем этом играет пилот. Какие даны ему органы управления для решения вобщем-то непростой задачи, каковой является управление вертолетом
С самолетом все более-менее понятно. У него есть две самостоятельные системы: система управления самолетом (собственно управление рулями и элеронами) и система управления двигателем. И органы в кабине экипажа в количестве трех штук 🙂 : ручка управления самолетом (РУС), ручка управления двигателем (РУД), и педали для управления рулем направления. Как в этом плане обстоят дела у вертолета?…
Начнем с того, что определим более конкретно типы управления вертолетом.
Первое — это вертикальное управление. Осуществляется путем одновременного изменения угла установки лопастей несущего винта (то есть изменением общего шага). Делает это автомат перекоса.
Второе — путевое управление.То есть изменение направления полета. Осуществляется при помощи рулевого (хвостового) винта путем изменения его тяги (то есть изменение общего шага рулевого винта). Если вертолет двухвинтовой схемы (без хвостового винта), то путем изменения крутящего момента одного из винтов. Об этом я уже говорил ранее.
Третий тип — поперечное управление. Это управление вертолетом по крену. Крен создается наклоном плоскости вращения винта (а значит и полной аэродинамической силы винта) в нужную сторону, вправо или влево. При этом появляется боковая составляющая полной аэродинамической силы, обеспечивающая возможность бокового движения вертолета. Кроме того сила тяги винта теперь уже не проходит через центр тяжести вертолета. Поэтому относительно него появляется момент, кренящий вертолет в нужную сторону. Все это тоже прерогатива автомата перекоса.
Ну и четвертый тип управления вертолетом — продольное управление. Это управление вертолетом по тангажу, при этом вертолет летит вперед или назад с соответствующей скоростью. Осуществляется путем наклона плоскости вращения несущего винта и, соответственно, вектора полной аэродинамической силы в продольном направлении, вперед или назад. При этом создается угол тангажа (вертолет опускает или поднимает нос) из-за создания момента наклоненной аэродинамической силы относительно центра тяжести вертолета. Плюс появляется горизонтальная составляющая этой силы, которая, собственно, и движет вертолет в нужном направлении. Главную роль здесь опять же играет автомат перекоса, меняющий циклический шаг винта.
Итак у вертолета есть три главных агрегата, которые определяют его движение. Двигатель, автомат перекоса и рулевой винт. И, собственно, управление вертолетом означает управление этими тремя агрегатами. Для этого существуют три системы: система управления автоматом перекоса (управление циклическим шагом несущего винта), система управления хвостовым винтом и система управления общим шагом винта во взаимодействии с управлением оборотами (мощностью) двигателя, или система «шаг-газ».
Что такое «шаг-газ». Дело в том, что угол установки лопастей несущего винта (общий шаг) и обороты двигателя связаны. Ведь если увеличить угол, то возрастет величина аэродинамических сил, действующих на лопасти. Увеличивается и подъемная сила, и сила сопротивления. Винт, как говорят, нагружается. Двигатель, находясь на определенном уровне мощности не может «обслужить» возросшую нагрузку и может начать терять обороты. Тяга винта, соответственно, может уменьшиться.
Чтобы этого не происходило, была придумана система шаг-газ, которая одновременно с увеличением угла установки лопастей подает команду в топливную автоматику на увеличение оборотов (то есть «увеличиваешь шаг – даешь газ» и наоборот), тем самым исключая падение мощности двигателя.
Теперь о том, что у нас в кабине. У пилота есть собственно две ручки управления вертолетом.
Первая – ручка управления циклическим шагом винта (или просто ручка управления вертолетом). Она самолетного типа, расположена перед креслом пилота, и с ее помощью осуществляется продольное и поперечное управление вертолетом. От нее через специальную систему тяг и качалок воздействие передается на тарелку автомата перекоса, которая, в свою очередь, определяет циклический угол установки лопастей.
Системы управления циклическим и общим шагом винта.

Кабина вертолета. Хорошо видны спаренные ручки управления и ручки шаг-газ.
Вторая – ручка управления общим шагом винта или, как ее еще называют «ручка шаг-газ». Эта ручка обычно расположена слева от кресла пилота и перемещается вертикально вверх-вниз. С ее помощью осуществляется вертикальное управление путем одновременного воздействия на автомат перекоса и систему изменения оборотов двигателя. Обычно обороты двигателя меняются на первой трети перемещения ручки, далее уже меняется только общий шаг винта.
Отдельно от шага винта мощность двигателя может меняться только в небольших пределах для необходимой корректировки. Для этого на ручке шаг-газ существует специальный корректор ( обычно что-то типа поворотного кольца).
На схеме под номерами: 1 — ручка управления циклическим шагом; 2 — ручка шаг-газ; 3 — автомат перекоса; 4 — агрегат системы управления двигателем.
Кроме ручек управления есть еще педали. С их помощью опять же через систему управления вертолетом летчик воздействует на рулевой винт с целью изменения общего шага его лопастей, меняя тем самым, его тягу и, соответственно, разворачивающий момент вертолета.

Система управления шагом рулевого винта.

Кабина вертолета. Хорошо видны ручка управления и правая педаль.
При использовании всех описанных органов управления вертолетом, этот аппарат превращается в маневренную машину с довольно широкими возможностями.
Основные режимы полета вертолета – это взлет, висение, разгон и набор высоты, маневрирование и далее снижение и посадка. Обычные, впрочем, режимы для любого летательного аппарата, за исключением, конечно, висения. Этот режим доступен еще только самолетам с вертикальным взлетом и посадкой (СВВП), не считая, конечно, всякой экзотики :-).
Чуть-чуть подробнее о режиме взлета. Существует два способа взлета. Первый – «по вертолетному». В этом случае вертолет взлетает вертикально с кратковременным зависанием на высоте 1,5-2 метров (контрольное висение), после чего производится разгон с набором высоты. Второй – «по самолетному». При этом вертолет разгоняется на земле, набирает скорость отрыва и взлетает с последующим набором высоты и скорости.
Способ взлета выбирается в зависимости от состояния самого аппарата и от внешних условий. Определяющим в этом плане является запас мощности двигателя, что вполне понятно :-). Этот запас, в свою очередь, зависит от массы вертолета (точнее взлетной массы) и от таких параметров состояния атмосферы, влияющих на параметры работы двигателя и несущего винта, как местное давление воздуха, температура и влажность (влияющие на плотность воздуха).

Взлет по вертолетному.
Кроме того на выбор способа взлета влияет размер и состояние поверхности площадки, на которой находится вертолет, наличие каких-либо препятствий по курсу взлета и обязательно направление и сила ветра у земли.
Чем выше барометрическая высота места взлета (ниже давление), чем выше температура и влажность воздуха, а также чем ниже скорость встречного ветра, тем ниже запас мощности двигателя, и тем ниже должна быть взлетная масса вертолета.
Взлет по вертолетному – это основной вид взлета для современных аппаратов. Он, однако, тоже может иметь различную конфигурацию. Дело в том, что при работе воздушного винта вблизи земли может появиться эффект воздушной подушки. Это явление, я думаю, известно практически каждому современному человеку.
Воздух, отбрасываемый несущим винтом вниз тормозится у земли и образует как бы поддерживающую аппарат подушку. Такое может происходить обычно на совсем малом расстоянии от земной поверхности. Считается, что для вертолета это явление можно принимать во внимание, если расстояние от земли до плоскости вращения винта равно радиусу винта (или меньше). В этом случае прирост подъемной силы составляет 10-15%.
Так вот взлет по вертолетному может осуществляться с разгоном вне зоны воздушной подушки или в ее зоне, а также может осуществляться разгон по наклонной траектории.
Первый случай выбирается тогда, когда взлетная площадка имеет ограниченные размеры и окружена высокими препятствиями, а также если она имеет сильное запыление или покрыта свежевыпавшим снегом. Режим работы двигателя при таком взлете – максимальный то есть запаса по мощности нет.
Это самый напряженный режим взлета, а при отказе двигателя (одного из двигателей) безопасная посадка не гарантирована. Вертикальный подъем должен осуществляться до высоты обеспечения прохода над препятствиями с превышением не менее 5 метров.
Взлет вне зоны воздушной подушки с площадки, ограниченной препятствиями.
Разгон по наклонной траектории может быть использован на такой же площадке, но с высотой препятствий до 5 метров. Запас мощности при таком взлете должен обеспечивать одновременный разгон с набором высоты. Должна быть гарантирована безопасная посадка в случае отказа двигателя (одного из двигателей).
Взлет с разгоном в зоне воздушной подушки – самый распространенный способ взлета. Он обычно производится с аэродромов (вертодромов), имеющих открытые подходы. При этом двигатель работает обычно на номинальном режиме, то есть имеется запас мощности для необходимого, в случае чего :-), маневрирования. Вертолет после контрольного висения разгоняется вдоль земли с углом тангажа на пикирование в 10-15 º (иной раз и больше, и это очень эффектно :-)) и далее переходит в набор высоты. Этот взлет, кстати, – самое распространенное из того, что мы видим в кино.
Если по вертолетному взлететь невозможно, то вертолет может взлететь по самолетному, вырулив для этого к месту старта. Далее все как у самолета :-). Ручка шаг-газ устанавливается на взлетный режим, ручка управления дается немного от себя (для появления горизонтальной тяги), вертолет разбегается и, набрав определенную скорость (порядка 40-50 км/ч), после небольшого взятия ручки управления на себя, отрывается от земли. Далее некоторое выдерживание на высоте около 1,5 метров и подъем.
Взлет по самолетному.
Вот так вкратце о возможностях взлета. О других рабочих (а также аварийных и специальных) режимах полета поговорим в следующих статьях и по пожеланиям трудящихся :-).
А пока всем, я думаю, понятно, что на любых режимах полета управление производится совместными перемещениями ручек управления вертолетом, шаг-газ и педалями. Управление вертолетом максимально приближено к самолетному, но отличия, конечно, на лицо. Пилотов вертолетов даже наблюдению из кабины за землей учат по-другому. Ничего не поделаешь, специфика. Да и сравнивать вертолет и самолет наверное было бы неправильно. Однако, как говорится глаз радует и тот и другой :-). Оба летают удивительно красиво. Что еще нужно ? 🙂 :-)…….
В конце статьи помещаю ролик, который уже есть в моей статье о турбовальном двигателе. Для сегодняшней статьи он подходит как нельзя лучше :-). Взлет с разгоном в зоне воздушной подушки. Правда не совсем типичный, а с применением еще одного элемента под названием шик, граничащий с воздушным хулиганством. Однако ведь до чего ж эффектно выглядит! :-). Летчик… Снимаю шляпу…
В довершении еще ролик « О том как летает вертолет». Последний, к сожалению, на английском языке. Но кое-какие полезные моменты с точки зрения управления в нем можно понять и так и они неплохо показаны. К сожалению более приемлемого материала в этот раз не нашел 🙁 …
До новых встреч…
Фотографии кликабельны.
No related posts.
avia-simply.ru
Автомат перекоса несущего винта вертолета
Сущность изобретения: автомат перекоса содержит вращающееся кольцо с тягами поворота лопастей, соединенное шлиц-шарниром с приводным валом от редуктора, невращающееся кольцо с шарнирно присоединенными к нему тягами продольного и поперечного управления и связанное подшипником с вращающимся кольцом, тягу управления общим шагом несущего винта, рамку, соединенную двумя сферическими подшипниками с невращающимся кольцом. Автомат перекоса дополнительно снабжен двуплечим рычагом, шарнирно закрепленным на корпусе редуктора, причем одно плечо рычага шарнирно соединено с тягой управления общим шагом винта, а другое плечо соединено с рамкой двумя сферическими подшипниками, центры которых расположены на оси, проходящей через центр вала несущего винта, при этом ось ортогональна другой оси, проходящей через центры сферических подшипников, соединяющих рамку с невращающимся кольцом и параллельна оси поворота рычага в шарнире, а присоединенные к невращающемуся кольцу тяги продольного и поперечного управления расположены по разные стороны от тяги управления общим шагом. 2 ил.
Изобретение относится к авиации, а именно к конструкции автомата перекоса несущего винта вертолета.
Известна конструкция автомата перекоса, используемая на вертолетах Ми-6, Ми-8 и др. включающая вращающуюся тарелку, тяги управления лопастями, шлиц-шарнир, поводок тарелки, соединяющий ее с приводным валом, невращающуюся тарелку, соединенную через карданный вал с ползуном, установленным подвижно на направляющей, выполненной на корпусе редуктора, тяги поворота лопастей, качалки продольного и поперечного управления и рычаг общего шага (Данилов В.А. Вертолет Ми-8, Транспорт, 1988, 159-164). Наиболее близким аналогом изобретения является устройство автомата перекоса несущего винта вертолета, который содержит вращающееся кольцо с тягами поворота лопастей, соединенное шлиц-шарниром с приводом вала от редуктора, невращающееся кольцо с шарнирно присоединенными к нему тягами продольного и поперечного управления, связанное подшипником с вращающимся кольцом, тягу управления общим шагом несущего винта, рамку, соединенную двумя сферическими подшипниками с невращающимся кольцом (FR, патент, N 2661886, B 64 C 27/605, 1991). Особенностью такой схемы автомата перекоса является большой диаметр подшипника, соединяющего вращающееся кольцо с невращающимся, в связи с требованиями к сборке направляющей и размещением шарниров и эластомерных блоков между ползуном и невращающимся кольцом. Изобретение направлено на создание компактной и надежной схемы автомата перекоса. Это достигается тем, что автомат перекоса несущего винта вертолета, содержащий вращающееся кольцо с тягами поворота лопастей, соединенное шлиц-шарниром с приводным валом от редуктора, невращающееся кольцо с шарнирно присоединенными к нему тягами продольного и поперечного управления и связанное подшипником с вращающимся кольцом, тягу управления общим шагом несущего винта, рамку, соединенную двумя сферическими подшипниками с невращающимся кольцом, согласно изобретению снабжен двуплечим рычагом, шарнирно закрепленным на корпусе редуктора, причем одно плечо рычага шарнирно соединено с тягой управления общим шагом винта, а другое плечо соединено с рамкой двумя сферическими подшипниками, центры которых расположены на оси, проходящей через центр вала несущего винта, при этом ось ортогональна другой оси, проходящей через центры сферических подшипников, соединяющих рамку с невращающимся кольцом, и параллельна оси поворота рычага в шарнире, а присоединенные к невращающемуся кольцу тяги продольного и поперечного управления расположены по разные стороны от тяги управления общим шагом. Такое выполнение автомата перекоса позволяет получить компактную компоновку агрегата в сочетании с элементами системы управления и редуктором, снизить вес и повысить надежность вертолета в целом. На фиг. 1 показан автомат перекоса несущего винта вертолета; на фиг.2 — сечение А-А на фиг.1. Вращающееся кольцо 1 с шарнирно закрепленными тягами 2 управления лопастями несущего винта и шлиц-шарниром 3 на радиально упорном подшипнике 4 установлены на невращающемся кольце 5. Поводок шлиц-шарнира 3 жестко зафиксирован с валом 6 редуктора. На невращающемся кольце 5 при помощи пальцев 7 и 8 и сферических подшипников 9 и 10 подвешена рамка 11. Точки пересечения осей пальцев 7 и 8 с соответствующими центрами сферических подшипников 9 и 10 обозначены точками «Г» и «Д». На рамке 11 при помощи пальцев 12 и 13 и сферических подшипников 14 и 15 в точках «К» и «М» закреплен рычаг 16. Этот рычаг с помощью пальца 17 установлен на кронштейне 18 в цилиндрических подшипниках 19 и 20 и упорных подшипниках 21 и 22, а кронштейн 18 жестко установлен на корпусе редуктора 23. Рычаг 16 выполнен двуплечим и его второе плечо шарнирно соединено с тягой управления общим шагом 24. Тяги продольного и поперечного управления 21 и 26 шарнирно присоединены к невращающемуся кольцу 5 по разные стороны относительно тяги управления общим шагом 24. Наличие сферических подшипников 9, 10, 14 и 15 обеспечивает поворот вращающегося кольца по сфере, что необходимо для нормальной работы системы управления вертолетом. При этом ось, проходящая через центры сферических подшипников 9 и 10 «Г» и «Д», и ось, проходящая через центры сферических подшипников 14 и 15 «К» и «М», взаимно перпендикулярны, а расположение рамки 11 и рычага 16, предназначенных для управления общим шагом и удержания невращающегося кольца от смещения и поворота относительно оси приводного вала, произвольно относительно плоскости продольного и поперечного управления автомата перекоса и не связано с углом упреждения управления. Ось поворота рычага 16 параллельна оси, проходящей через точки «К» и «М». Устройство работает следующим образом. Циклическое управления осуществляется наклоном вращающегося кольца 1 тягами управления 25 и 26 относительно двух осей путем перемещения точек «А» и «В». При этом происходит поворот вращающегося кольца 1 и невращающегося кольца 5 в сферических подшипниках 9 и 10 относительно рамки 11 и рамки 11 совместно с вращающимся кольцом 1 и невращающимся кольцом 5 в сферических подшипниках 14 и 15 относительно рычага 16. Управление общим шагом осуществляется перемещением точки «П» рычага 16 тягой управления общего шага 24. Поскольку рычаг 16 шарнирно установлен на кронштейне 18, жестко закрепленном на корпусе редуктора 13, вращающееся кольцо 5 смещается и поворачивается по радиусу «R» относительно оси, проходящей через ось кронштейна 18, и смещается от оси вала 6 на незначительную величину. При совместном циклическом управлении и управлении общим шагом осуществляется одновременное перемещение точек «A», «B» и «П». При этом происходит одновременно наклон и перемещение неподвижного кольца 5 и вращающегося кольца 1.Формула изобретения
Автомат перекоса несущего винта вертолета, содержащий вращающееся кольцо с тягами поворота лопастей, соединенное шлиц-шарниром с приводным валом от редуктора, невращающееся кольцо с шарнирно присоединенными к нему тягами продольного и поперечного управления и связанное подшипником с вращающимся кольцом, тягу управления общим шагом несущего винта, рамку, соединенную двумя сферическими подшипниками с невращающимся кольцом, отличающийся тем, что он снабжен двуплечим рычагом, шарнирно закрепленным на корпусе редуктора, причем одно плечо рычага шарнирно соединено с тягой управления общим шагом винта, а другое плечо соединено с рамкой двумя сферическими подшипниками, центры которых расположены на оси, проходящей через центр вала несущего винта, при этом ось ортогональна другой оси, проходящей через центры сферических подшипников, соединяющих рамку с невращающимся кольцом, и параллельна оси поворота рычага в шарнире, а присоединенные к невращающемуся кольцу тяги продольного и поперечного управления расположены по разные стороны от тяги управления общим шагом.РИСУНКИ
Рисунок 1, Рисунок 2findpatent.ru