
Винтокрылые лошадки
За последнее время в мире вертолетной техники произошло несколько значимых событий. Американская компания Kaman Aerospace объявила о намерении возобновить производство синхроптеров, Airbus Helicopters пообещала разработать первый гражданский вертолет с электродистанционным управлением, а немецкая e-volo — испытать 18-роторный двухместный мультикоптер. Чтобы не запутаться во всем этом разнообразии, мы решили составить краткий ликбез по основным схемам вертолетной техники.

Фотография: Official U.S. Navy Page / flickr.com
Впервые идея летательного аппарата с несущим винтом появилась около 400 года нашей эры в Китае, однако дальше создания детской игрушки дело не пошло. Всерьез инженеры взялись за создание вертолета в конце XIX века, а первый вертикальный полет нового типа летательного аппарата состоялся в 1907 году, спустя всего четыре года после первого полета братьев Райт. В 1922 году авиаконструктор Георгий Ботезат испытал вертолет-квадрокоптер, разработанный по заказу Армии США. Это был первый в истории устойчиво управляемый полет техники такого типа. Квадрокоптер Ботезата сумел взлететь на высоту пяти метров и провел в полете несколько минут.
С тех пор вертолетная техника претерпела множество изменений. Появился класс винтокрылых летательных аппаратов, который сегодня делится на пять типов: автожир, вертолет, винтокрыл, конвертоплан и X-крыло. Все они отличаются конструкцией, способом взлета и полета, управлением несущим винтом. В этом материале мы решили рассказать именно о вертолетах и их основных типах. При этом за основу была взята классификация по компоновке и расположению несущих винтов, а не традиционная — по типу компенсации реактивного момента несущего винта.

Фотография: Official U.S. Navy Page / flickr.com
Вертолет является винтокрылым летательным аппаратом, у которого подъемная и движущая силы создаются одним или несколькими несущими винтами. Такие винты располагаются параллельно земле, а их лопасти устанавливаются под определенным углом к плоскости вращения, причем угол установки может изменяться в достаточно широких пределах — от нуля до 30 градусов. Установка лопастей на ноль градусов называется холостым ходом винта или флюгированием. В этом случае несущий винт не создает подъемной силы.
Во время вращения лопасти захватывают воздух и отбрасывают его в направлении, противоположном движению винта. В результате перед винтом создается зона пониженного давления, а за ним — повышенного. В случае вертолета так возникает подъемная сила, которая очень похожа на образование подъемной силы фиксированным крылом самолета. Чем больше угол установки лопастей, тем большую подъемную силу создает несущий винт.
Характеристики несущего винта определяются двумя основными параметрами — диаметром и шагом. Диаметр винта определяет возможности вертолета по взлету и посадке, а также отчасти величину подъемной силы. Шаг винта — это воображаемое расстояние, которое воздушный винт пройдет в несжимаемой среде при определенном угле установки лопастей за один оборот. Последний параметр влияет на подъемную силу и скорость вращения ротора, которую на большей части полета летчики стараются держать неизменной, меняя только угол установки лопастей.

Фотография: Wikimedia Commons

Фотография: Phillip Capper / flickr.com
При полете вертолета вперед и вращении несущего винта по часовой стрелке, набегающий поток воздуха сильнее воздействует на лопасти с левой стороны, из-за чего возрастает и их эффективность. В результате левая половина окружности вращения винта создает большую подъемную силу, чем правая, и возникает кренящий момент. Для его компенсации конструкторы придумали автомат перекоса — это особая система, которая уменьшает угол установки лопастей слева и увеличивает его справа, выравнивая таким образом подъемную силу по обе стороны винта.
В целом, вертолет имеет несколько преимуществ и несколько недостатков перед самолетом. К преимуществам относится возможность вертикального взлета и посадки на площадки, диаметр которых в полтора раза превосходит диаметр несущего винта. При этом вертолет может на внешней подвеске перевозить крупногабаритные грузы. Вертолеты отличаются и лучшей маневренностью, поскольку могут висеть вертикально, лететь боком или задом-наперед, поворачиваться на месте.
К недостаткам же относятся большее, чем у самолетов, потребление топлива, большая инфракрасная заметность из-за горячего выхлопа двигателя или двигателей, а также повышенная шумность. Кроме того, вертолетом в целом сложнее управлять из-за ряда особенностей. Например, летчикам вертолетов знакомы явления земного резонанса, флаттера, вихревого кольца, эффекта запирания несущего винта. Эти факторы могут приводить к разрушению или падению машины.
У вертолетной техники любых схем существует режим авторотации. Он относится к аварийным режимам. Это означает, что при отказе, например, двигателя несущий винт или винты при помощи обгонной муфты отсоединяются от трансмиссии и начинают свободно раскручиваться набегающим потоком воздуха, тормозя падение машины с высоты. В режиме авторотации возможна управляемая аварийная посадка вертолета, причем вращающийся несущий винт через редуктор продолжает раскручивать рулевой винт и генератор.

Классическая схема
Фотография: Official U.S. Navy Page / flickr.com
Из всех типов вертолетных схем сегодня самой распространенной является классическая. При такой схеме машина имеет только один несущий винт, который может приводиться в движение одним, двумя или даже тремя двигателями. К этому типу, например, относятся ударные AH-64E Guardian, AH-1Z Viper, Ми-28Н, транспортно-боевые Ми-24 и Ми-35, транспортные Ми-26, многоцелевые UH-60L Black Hawk и Ми-17, легкие Bell 407 и Robinson R22.
При вращении несущего винта на вертолетах классической схемы возникает реактивный момент, из-за которого корпус машины начинает раскручиваться в сторону, противоположную вращению ротора. Для компенсации момента используют рулевое устройство на хвостовой балке. Как правило им является рулевой винт, но это может быть и фенестрон (винт в кольцевом обтекателе) или несколько воздушных сопел на хвостовой балке.

Белл AH-1Z «Вайпер».
Фотография: Wikimedia Commons
Особенностью классической схемы являются перекрестные связи в каналах управления, обусловленные тем, что рулевой винт и несущий приводятся одним и тем же двигателем, а также наличием автомата перекоса и множества других подсистем, ответственных за управление силовой установкой и роторами. Перекрестная связь означает, что при изменении какого-либо параметра работы воздушного винта, поменяются и все остальные. Например, при увеличении частоты вращения несущего винта возрастет и частота вращения рулевого.
Управление полетом осуществляется наклоном оси вращения несущего винта: вперед — машина полетит вперед, назад — назад, вбок — вбок. При наклоне оси вращения возникнет движущая сила и уменьшается подъемная. По этой причине для сохранения высоты полета летчику необходимо менять и угол установки лопастей. Направление полета задается изменением шага рулевого винта: чем он меньше, тем меньше компенсируется реактивный момент, и вертолет поворачивает в сторону, противоположную вращению несущего винта. И наоборот.
В современных вертолетах в большинстве случаев управление полетом по горизонтали осуществляется при помощи автомата перекоса. Например, для движения вперед летчик при помощи автомата уменьшает угол установки лопастей для передней половины плоскости вращения крыла и увеличивает — для задней. Таким образом сзади подъемная сила увеличивается, а спереди — уменьшается, благодаря чему изменяется наклон винта и появляется движущая сила. Такая схема управления полетом применяется на всех вертолетах почти всех типов, если на них установлен автомат перекоса.

AH-64 «Апач».
Фотография: Wikimedia Commons

Соосная схема
Фотография: Wikimedia Commons
Второй по распространенности вертолетной схемой является соосная. В ней рулевой винт отсутствует, зато есть два несущих винта — верхний и нижний. Они располагаются на одной оси и вращаются синхронно в противоположных направлениях. Благодаря такому решению винты компенсируют реактивный момент, а сама машина получается несколько более устойчивой по сравнению с классической схемой. Кроме того, у вертолетов соосной схемы практически отсутствуют перекрестные связи в каналах управления.

Камов Ка-27.
Фотография: Wikimedia Commons
Наиболее известным производителем вертолетов соосной схемы является российская компания «Камов». Она выпускает корабельные многоцелевые вертолеты Ка-27, ударные Ка-52 и транспортные Ка-226. Все они имеют по два винта, расположенных на одной оси друг под другом. Машины соосной схемы, в отличие от вертолетов классической схемы, способны, например, делать воронку, то есть выполнять облет цели по кругу, оставаясь на одном и том же расстоянии от нее. При этом носовая часть всегда остается развернутой в сторону цели. Управление рысканием осуществляется подтормаживанием одного из несущих винтов.

Камов Ka-52.
Фотография: Wikimedia Commons
В целом управлять вертолетами соосной схемы несколько проще, чем обычными, особенно в режиме висения. Но существуют и свои особенности. Например, при выполнении петли в полете может случиться перехлест лопастей нижнего и верхнего несущего винтов. Кроме того, в проектировании и производстве соосная схема более сложна и дорога, чем классическая схема. В частности из-за редуктора, передающего вращение вала двигателя на винты, а также автомата перекоса, синхронно устанавливающего угол лопастей на винтах.

Камов Ka-52.
Фотография: Wikimedia Commons

Продольная и поперечная схемы
Фотография: Wikimedia Commons
Третьей по популярности является продольная схема расположения несущих винтов вертолета. В этом случае винты располагаются параллельно земле на разных осях и разнесены друг от друга — один находится над носовой частью вертолета, а другой — над хвостовой. Типичным представителем машин такой схемы является американский тяжелый транспортный вертолет CH-47G Chinook и его модификации. Если винты располагаются на законцовках крыльев вертолета, то такая схема называется поперечной.
Серийных представителей вертолетов поперечной схемы сегодня не существует. В 1960-1970-х годах конструкторское бюро Миля разрабатывало тяжелый грузовой вертолет В-12 (также известен, как Ми-12, хотя этот индекс неверен) поперечной схемы. В августе 1969 года прототип В-12 установил рекорд грузоподъемности среди вертолетов, подняв на высоту 2,2 тысячи метров груз массой 44,2 тонны. Для сравнения самый грузоподъемный в мире вертолет Ми-26 (классическая схема) может поднимать грузы массой до 20 тонн, а американский CH-47F (продольная схема) — массой до 12,7 тонны.

Боинг CH-47 «Чинук»
Фотография: Wikimedia Commons
У вертолетов продольной схемы несущие винты вращаются в противоположных направлениях, однако это компенсирует реактивные моменты лишь отчасти, из-за чего в полете летчикам приходится учитывать возникающую боковую силу, уводящую машину с курса. Движение в стороны задается не только наклоном оси вращения несущих винтов, но и разными углами установки лопастей, а управление рысканием производится за счет изменения частоты вращения роторов. Задний винт у вертолетов продольной схемы всегда располагается чуть выше переднего. Это сделано для исключения взаимного влияния от их воздушных потоков.
Кроме того, на определенных скоростях полета вертолетов продольной схемы иногда могут возникать значительные вибрации. Наконец, вертолеты продольной схемы оснащаются сложной трансмиссией. По этой причине такая схема расположения винтов распространена мало. Зато вертолеты продольной схемы меньше других машин подвержены возникновению вихревого кольца. В этом случае во время снижения воздушные потоки, создаваемые винтом, отражаются от земли вверх, затягиваются винтом и снова направляются вниз. При этом подъемная сила несущего винта резко снижается, а изменение частоты вращения ротора или увеличение угла установки лопастей эффекта практически не оказывает.

Боинг CH-47 «Чинук».
Фотография: Wikimedia Commons

Синхроптер
Фотография: Wikimedia Commons
Сегодня вертолеты, построенные по схеме синхроптера, можно отнести к самым редким и наиболее интересными с конструктивной точки зрения машинами. Их производством до 2003 года занималась только американская компания Kaman Aerospace. В 2017 году компания планирует возобновить выпуск таких машин под обозначением K-Max. Синхроптеры можно было бы отнести к вертолетам поперечной схемы, поскольку валы двух их винтов расположены по бокам корпуса. Однако оси вращения этих винтов расположены под углом другу к другу, а плоскости вращения — пересекаются.
У синхроптеров, как у вертолетов соосной, продольной и поперечной схем, рулевой винт отсутствует. Несущие же винты вращаются синхронно в противоположные стороны, а их валы связаны друг с другом жесткой механической системой. Это гарантированно предотвращает столкновение лопастей при разных режимах и скоростях полета. Впервые синхроптеры были изобретены немцами во время второй мировой войны, однако серийное производство велось уже в США с 1945 года компанией Kaman.

Kaman K-1200 K-Max.
Фотография: Wikimedia Commons
Направлением полета синхроптера управляют исключительно изменением угла установки лопастей винтов. При этом из-за перекрещивания плоскостей вращения винтов, а значит сложения подъемных сил в местах перекрещивания, возникает момент кабрирования, то есть подъема носовой части. Этот момент компенсируется системой управления. В целом же, считается, что синхроптером проще управлять в режиме висения и на скоростях больше 60 километров в час.
К достоинствам таких вертолетов относится экономия топлива за счет отказа от рулевого винта и возможность более компактного размещения агрегатов. Кроме того, синхроптерам характерна большая часть положительных качеств вертолетов соосной схемы. К недостаткам же относится необычайная сложность механической жесткой связи валов винтов и системы управления автоматами перекоса. В целом это делает вертолет дороже, по сравнению с классической схемой.

Kaman K-MAX.
Фотография: Wikimedia Commons

Мультикоптер
Фотография: Ville Hyvönen / flickr.com
Разработка мультикоптеров началась практически одновременно с работами над вертолетом. Именно по этой причине первым вертолетом, совершившим управляемый взлет и посадку стал в 1922 году квадрокоптер Ботезата. К мультикоптерам относят машины, как правило имеющие четное количество несущих винтов, причем их должно быть больше двух. В серийных вертолетах сегодня схема мультикоптеров не используется, однако она чрезвычайно популярна у производителей малой беспилотной техники.
Дело в том, что в мультикоптерах используются винты с неизменяемым шагом винта, причем каждый из них приводится в движение своим двигателем. Компенсация реактивного момента производится вращением винтов в разные стороны — половина крутится по часовой стрелке, а другая половина, расположенная по диагонали, — в противоположном направлении. Это позволяет отказаться от автомата перекоса и в целом значительно упростить управление аппаратом.
Для взлета мультикоптера частота вращения всех винтов увеличивается одинаково, для полета в сторону — вращение винтов на одной половине аппарата ускоряется, а на другой — замедляется. Поворот мультикоптера производится замедлением вращения, например, винтов, крутящихся по часовой стрелке или наоборот. Такая простота конструкции и управления и послужила основным толчком к созданию квадрокоптера Ботезата, однако последующее изобретение рулевого винта и автомата перекоса практически затормозило работы над мультикоптерами.

Гексакоптер DJI S800.
Фотография: Wikimedia Commons
Причиной же, по которой сегодня не существует мультикоптеров, предназначенных для перевозки людей, является безопасность полетов. Дело в том, что в отличие от всех остальных вертолетов, машины с несколькими винтами не могут совершать аварийную посадку в режиме авторотации. При отказе всех двигателей мультикоптер становится неуправляемым. Впрочем, вероятность такого события невысока, однако отсутствие режима авторотации является главным препятствием для прохождении сертификации на безопасность полетов.
Впрочем, в настоящее время немецкая компания e-volo занимается разработкой мультикоптера с 18 роторами. Этот вертолет предназначен для перевозки двух пассажиров. Как ожидается, он совершит первый полет в ближайшие несколько месяцев. По расчетам конструкторов, прототип машины сможет находиться в воздухе не больше получаса, однако этот показатель планируется довести по меньшей мере до 60 минут.
Следует также отметить, что помимо вертолетов с четным количеством винтов существуют и мультикоптерные схемы с тремя и пятью винтами. У них один из двигателей расположен на отклоняемой в стороны платформе. Благодаря этому осуществляется управление направлением полета. Впрочем, в такой схеме становится сложнее гасить реактивный момент, поскольку два винта из трех или три из пяти всегда вращаются в одном направлении. Для нивелирования реактивного момента некоторые из винтов вращаются быстрее, а это создает ненужную боковую силу.

Скоростная схема
Фотография: Wikimedia Commons
Сегодня наиболее перспективной в вертолетной технике считается скоростная схема, позволяющая вертолетам летать на существенно большей скорости, чем могут современные машины. Чаще всего такую схему называют комбинированным вертолетом. Машины этого типа строятся по соосной схеме или с одним винтом, однако имеют небольшое крыло, создающее дополнительную подъемную силу. Кроме того, вертолеты могут быть оснащены толкающим винтом в хвостовой части или двумя тянущими на законцовках крыла.
Ударные вертолеты классической схемы AH-64E способны развивать скорость до 293 километров в час, а соосные Ка-52 — до 315 километров в час. Для сравнения, комбинированный вертолет — демонстратор технологий Airbus Helicopters X3 с двумя тянущими винтами может разгоняться до 472 километров в час, а его американский конкурент с толкающим винтом — Sikorksy X2 — до 460 километров в час. Перспективный разведывательный скоростной вертолет S-97 Raider сможет летать на скоростях до 440 километров в час.

Sikorsky X2
Фотография: Sikorsky
Строго говоря, комбинированные вертолеты относятся скорее не к вертолетам, а к другому типу винтокрылых летательных аппаратов — винтокрылам. Дело в том, что движущая сила у таких машин создается не только и не столько несущими винтами, сколько толкающими или тянущими. Кроме того, за создание подъемной силы отвечают и несущие винты, и крыло. А на больших скоростях полета управляемая обгонная муфта отключает несущие винты от трансмиссии и дальнейший полет идет уже в режиме авторотации, при которой несущие винты работают, фактически, как крыло самолета.
В настоящее время разработкой скоростных вертолетов, которые в перспективе смогут развивать скорость свыше 600 километров в час, занимаются несколько стран мира. Помимо Sikorsky и Airbus Helicopters такие работы ведут российские «Камов» и конструкторское бюро Миля (Ка-90/92 и Ми-X1 соответственно), а также американская Piacesky Aircraft. Новые комбинированные вертолеты смогут совместить в себе скорость полета турбовинтовых самолетов и вертикальные взлет и посадку, присущие обычным вертолетам.
Василий Сычев
nplus1.ru
Лопасти несущего винта вертолета
Условия работы лопасти несущего винта вертолета во многом отличаются от условий работы крыла самолета. Основная особенность в том, что действующие на нее нагрузки являются переменными во времени. Поэтому при выборе материала элементов лопасти в качестве главных выдвигаются следующие требования:
— усталостная прочность: трещино стойкость (сопротивление распространению усталостной трещины) и слабая чувствительность к концентраторам напряжений;
— неизменность механических свойств материала элементов и их соединений от заданного времени эксплуатации, температуры и атмосферных условий окружающей среды;
— технологические требования: возможности производства по обеспечению заданных форм сечения элементов конструкции; повышение ресурса элементов конструкции методами упрочнения; контроль за качеством соединений и заданными геометрическими
размерами при изготовлении элементов конструкции в процессе сборки лопасти; ремонтопригодность конструкции лопасти в процессе ее эксплуатации.
Кроме перечисленного, необходимо учитывать стоимость материала и технологического процесса изготовления лопасти и стоимость ее эксплуатации.
С учетом вышеизложенных требований выбирают тот материал, а который имеет максимальные удельную прочность — и удельный Е модуль упругости — р.
При формировании лонжерона лопасти из гибридных композиционных материалов стремятся к максимальной их совместимости с материалом матрицы, например, по величине динамического удлинения, степени адгезии, по коэффициенту линейного и объемного расширения, влагоёмкости, времени старения, чувствительности к ударным нагрузкам.
Чувствительность к ударным нагрузкам определяется величиной ударной вязкости. Для волокнистых композитов ударная вязкость характеризуется отношением. Одним из способов повышения ударной вязкости композитов является введение в их состав более прочных и менее жестких волокон, например стеклянных или органических — в углепластики.
В процессе развития вертолетостроения основной силовой элемента лопасти — лонжерон — выполнялся из дерева, легированных сталей, алюминиевых сплавов, нержавеющей стали, титановых сплавов. В настоящее время широко практикуется изготовление лонжерона из композиционных материалов.

Агрегаты каркаса — обшивка, нервюры, хвостовой стрингер, ранее изготовляемые из фанеры, полотна, алюминиевых сплавов, в современных лопастях изготавливаются также из КМ.
Дерево нашло применение в практике Ухтомского вертолетного завода им. Ы.И. Камова в период его становления. Определяющими в выборе этого материала являлись следующие соображения: древесина малочувствительна к концентраторам напряжений, трещино стойкая; она не требует сложного технологического оборудования при изготовлении лонжерона и каркаса лопасти; затраты на изготовление лопасти не велики.
Центральная часть лонжерона выполнялась из дельта- древесины (склеенные тонкие листы древесины), носовая часть профиля состояла из набора склеенных сосновых реек. Хвостовая часть представляла собой каркас из фанерной обшивки, приклеенной к пенопласту. Поверхность лопасти покрывалась полотном и влагостойким лаком.
В процессе эксплуатации выявились существенные недостатки деревянной лопасти:
— несмотря на влагостойкое покрытие поверхности лопасти элементы конструкции насыщались влагой, что приводило к изменению центра тяжести сечения (смещался назад) и уменьшению критической скорости флаттера лопасти;
— пропитка антисептиками не устраняла в процессе эксплуатации гнилостного разрушения древесины, при том что ее механические свойства ухудшались.
В практике Московского вертолетного завода им. М.Л. Миля в лопастях НВ применялась смешанная конструкция — лонжерон выполнялся из стальной трубы, а в элементах каркаса использовалось дерево и полотно.
Требования прочности, жесткости и аэродинамики с учетом технологических возможностей привели к необходимости изменения форм сечения лонжерона по радиусу с цилиндрической на эллиптическую. Металлургическая промышленность не располагала оборудованием для формирования данного лонжерона из одной заготовки. Поэтому конструкторы вынуждены были ввести телескопические стыки, соединенные стальными заклепками, с использованием упрочняющей технологии (дорнирование отверстий), плавные переходы жесткости в месте стыка, продольную шлифовку внутренней и внешней поверхностей каждой части лонжерона.
Учитывая характер аэродинамических нагрузок по хорде профиля, переднюю часть профиля лопасти выполняли из фанеры, а заднюю — из полотна в комлевой части лопасти и фанерной обшивки в средней и концевой ее части.
Аэродинамические нагрузки и центробежная сила, действующая на каркас, через нервюры передавались на лонжерон. Передача сил и моментов на лонжерон осуществлялась через фланцы, приклепанные к лонжерону и стенке нервюры.
В процессе эксплуатации выявился ряд недостатков принятой конструктивно-силовой схемы лопасти. Наличие стыков и заклепочных соединений существенно усложнило процесс достижения необходимого ресурса лопасти. Использование в хвостовой части без моментной обшивки (полотна) приводило к тому, что под действием внешних аэродинамических сил и центробежной силы воздуха, находящегося внутри каркаса, существенно искажался профиль лопасти, что ухудшало его аэродинамические характеристики.
Введение дренажного отверстия на нижней поверхности в конце лопасти привело к местным потерям на перетекание воздуха внутри каркаса под действием центробежных сил. Устранение этого недостатка за счет отказа от полотна и переход па фанерную обшивку по всей поверхности лопасти существенно увеличило массу лопасти и сдвигало центр масс лопасти назад. В результате совместной деятельности конструкторов, технологов и металлургов по устранению отмеченных недостатков был создан лонжерон заданного переменного сечения без стыков, а хвостовую часть лопасти стали выполнять из дюралюминевой обшивки, подкрепленной сотовым блоком, не изменяющей форму под действием аэродинамических нагрузок.
Для трубчатого лонжерона применяется обычно труба из высоколегированной стали типа ЗОХГСА или 40ХНМА, закаленной и отпущенной на прочность (с^ = 1100—1300 МПа). После горячей и холодной прокатки, формообразования и закалки наружная и внутренняя поверхности трубы полируются. На внешней и внутренней поверхностях лонжерона создается наклеп виброударным способом, повышающий предел выносливости до а ю = 280—300 МПа mi» при постоянной части нагружения ат= 200—250 МПа.
В конструкции лопасти, основанной на стальной трубе, лонжерон обычно защищен каркасом и не может быть механически поврежден в эксплуатации.
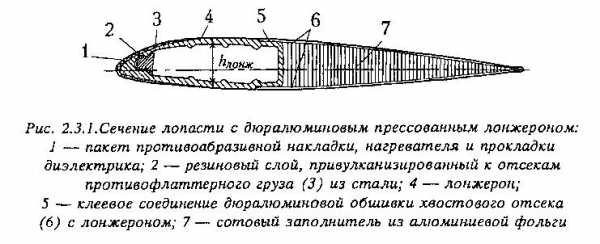
Использование прессованного профиля из дюралюминиевого материала позволило формировать профиль лонжерона с наиболее целесообразным сечением ( 2.3.1). Применение замкнутого профиля, полученного методом прессования (экструзия), ограничил диапазон использования существующих дюралюминиевых сплавов. В процессе прессования происходит разделение материала на две части, поэтому в формирующем профиль инструменте (фильере) эти две части должны соединяться и свариваться давлением. Чтобы структура материала в местах сварки не ухудшалась, необходимо применять материал с высокой коррозионной стойкостью, Усталостная прочность дюралюминиевого лонжерона может снизиться из- за дефектов, возникающих в процессе прессования профиля и механической обработки .лонжерона. Поэтому необходимо не только наружную, но и внутреннюю поверхности лонжерона упрочнять виброударным способом. Предел выносливости может быть доведен до а = 55—60 МПа при о т= 60 МПа. Для исключения минимальной возможности коррозионного повреждения прессованных лонжеронов в процессе производства и в условиях эксплуатации необходимо применять гальванические покрытия (например, анодирование) после промежуточных операций его обработки.
Процесс прессования не позволяет изменять форму сечения по заданному закону, поэтому требуемую высоту профиля по длине лопасти можно обеспечить только за счет фрезерования внешней поверхности. В результате конструктор имеет возможность разрабатывать конструктивно-силовую схему лопасти только прямоугольной формы в плане (сужение r| = 1).
Контакт поверхности лонжерона с потоком воздуха привел к необходимости защиты этой поверхности от эрозионного повреждения.

Была сделана попытка формирования лонжерона лопасти из многослойного тонкого листа нержавеющей стали, соединенного в монолит при помощи склейки. Предполагалось создание конструкции, обладающей большой стойкостью к распространению усталостной трещины. Органическим недостатком данной конструкции была невозможность обеспечения качественной склейки и устранения выявленных дефектов клеевых поверхностей.
Лопасти с лонжероном замкнутой формы позволяют использовать технические средства постоянного контроля усталостных разрушений материала лонжерона. Система сигнализации повреждения цельнометаллических лонжеронов состоит из сигнализатора давления воздуха и заглушек на концах лонжерона ( 2.3.2). Внутренняя полость лонжерона заполняется воздухом под давлением, превышающим давление начала срабатывания сигнализатора.
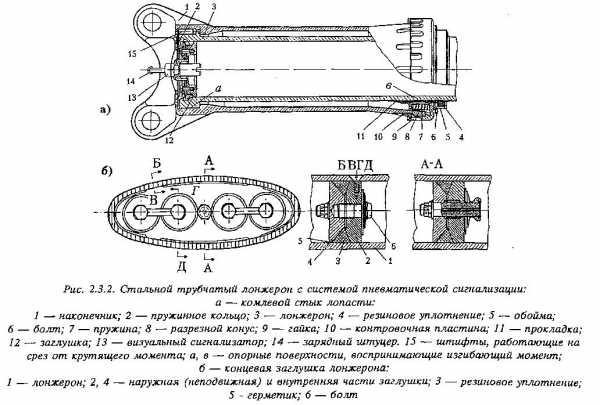
В случае появления в лонжероне трещины давление воздуха в нем падает. Информация о разгерметизации полости лонжерона поступает от сигнализатора давления в виде выдвижения красного колпачка сильфона, установленного в комлевой части каждой лопасти.
Индикация давления воздуха в лонжеронах в кабину экипажа не выводится, т.к. процесс роста трещины до разрушения лонжерона в несколько раз превышает время максимально возможной длительности полета вертолета. Контроль за состоянием лопасти осуществляется при меж полетном осмотре по положению сигнализатора.
Давление воздуха в лонжероне создается с учетом температуры окружающего воздуха и с учетом давления начала срабатывания сигнализатора.
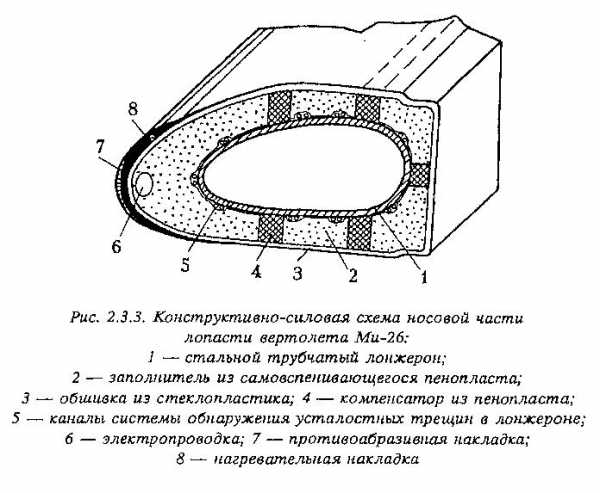
В лопастях вертолета Ми-26 стальные трубчатые лонжероны по наружной поверхности облицованы стеклолентой, за счет чего при возникновении трещины в лонжероне исключается возможность обнаружения повреждения лонжерона с помощью пневматической системы сигнализации. Для обеспечения надежного функционирования системы сигнализации повреждения лонжерона по всей длине его внешней поверхности укладываются двойные фторопластовые шнуры ( 2.3.3) и после обмотки лентами из стеклоткани производится полимеризация в пресс-форме. Фторопластовые шнуры вытягиваются, образуя воздушные каналы диаметром
2 мм, открытые со стороны внешней поверхности трубы лонжерона. Появление усталостной трещины в зоне воздушных каналов приводит к падению давления в полости лонжерона и срабатыванию сигнализатора. Каналы выполняются двойными по технологическим соображениям — всегда имеется вероятность обрыва фторопластового шнура при его вытягивании из полости длиной 14 м.

Анизотропность композиционных материалов открыла широкие возможности применения их в лопастях НВ. Применение КМ позволяет направленно формировать жесткостные характеристики лопасти (изгибные и крутильные) за счет соответствующей ориентации армирующих волокон композита с учетом сложного характера ее нагружения.
Вертолетостроение является наиболее передовой отраслью авиационной техники, здесь стали смело применять КМ в таком ответственном и сложно нагружаемом агрегате, как лопасть НВ.
Эффективность применения КМ в силовых элементах лопастей определяется рядом преимуществ этих материалов по сравнению с металлами. В частности, аэродинамические и аэроупругие параметры лопастей композитов могут выбираться без учета ограничений, вызываемых технологическими процессами получения катаных, экструдированных (прессованных) или механически обработанных металлических конструктивных элементов.
Композитным конструкциям можно придать сложные аэродинамические формы, а регулируемая анизотропия материала позволяет создавать требуемую жесткость в пределах заданных аэродинамических и аэроупругих параметров. В результате достигается большая аэродинамическая эффективность винтов, определяемая отношением подъемной силы к аэродинамическому сопротивлению.
С помощью КМ, обладающих более высокой удельной прочностью, изготавливают лопасти меньшей массы, чем металлические. Снижение массы лопастей, в свою очередь, оказывает влияние па центробежные силы, инерцию ротора, частотные и другие характеристики.
Регулируемая в широких пределах анизотропия КМ позволяет получать необходимые конструктивные и демпфирующие параметры лопасти.
Частота собственных колебаний лопасти может быть изменена не только перераспределением массы, но и выбором армирующих волокон, имеющих низкий или высокий модуль упругости, включая их гибридизацию (смешивание), степени армирования и ориентации армирующих волокон относительно оси лопасти. Крутильная жесткость лопасти может быть существенно увеличена за счет добавления слоев с ориентацией ± 45° относительно размаха лопасти при незначительном изменении частот продольных колебаний.
Одним из возможных критериев оптимальности панели из КМ, обеспечивающим минимум ее массы, является условие совпадения траектории армирования с траекторией максимального главного напряжения. Как правило, КМ представляет собой совокупность однонаправленных или тканевых слоев с различными толщинами и углами ориентации волокон. Свойства такого материала определяются свойствами отдельных слоев и структурой.
Эффективная реализация достоинств композитов в конструкциях лопастей требует решения комплекса задач, связанных с выбором взаимно согласованных исходных компонентов (волокон и матрицы), определением рациональной структуры материала, соответствующей характеру внешних нагрузок и других воздействий с учетом специфических свойств материала и технологических ограничений при разработке элементов лопасти.
Механическое поведение КМ определяется высокой прочностью армирующих волокон, жесткостью матрицы и прочностью связи на границе «матрица — волокно».
Наибольшее применение получили стеклопластиковые КМ на эпоксидной матрице. Это объясняется в первую очередь низкой стоимостью стеклопластика. Дальнейшее развитие конструкции лопасти из КМ связано с использованием гибридных композиций
— сочетания углеволокна с органоволокном и других подобных вариантов.
Углепластик, обладая высокой прочностью, чувствителен к ударным нагрузкам. Введение менее жесткого материала и защита поверхности лонжерона от каких-либо повреждений предоставляет возможности широкого применения подобных композиций.
Лонжерон с замкнутым коробчатым сечением £)-образной формы может быть изготовлен методом намотки однонаправленной лентой на оправке. Этот метод изготовления лонжеронов лопасти широко применяется при крупном серийном производстве, где целесообразно максимально автоматизировать процесс изготовления. В практике ОКБ Н.И. Камова выбрана технология изготовления лонжерона частями методом выкладки из различных тканей или лент однонаправленного материала на оправках.
Листы материала лонжерона собирают в пакеты и подвергают предварительной опрессовке в автоклаве при невысокой температуре. Листы при этом слипаются, пакеты приобретают необходимые для дальнейшей сборки форму и жесткость, а полимеризации связующего практически не происходит. После опрессовки пакеты представляют собой профиль открытого контура.
Затем пакеты собираются совместно с центровочными грузами, нагревательным элементом и комлевыми пластинами в один блок, внутри которого располагается технологическая резиновая пресс- камера. Блок пакетов с пресс- камерой помещают в специальную пресс-форму, внутренний контур которой соответствует внешнему контуру носовой части лопасти.
В пресс-камеру подается сжатый азот, а пресс-форму нагревают. При этом лонжерон приобретает необходимую форму, связующее полимеризуется и все элементы лонжерона прочно склеиваются между собой. По окончании процесса прессования лонжерон извлекают из пресс-формы, удаляют из него пресс-камеру и обрезают припуски. Такой способ производства позволяет получить лонжерон замкнутого контура из различных армирующих наполнителей на разных связующих, в любом сочетании с неограниченными возможностями по их размещению в конструкции. К сборочному приспособлению для изготовления лонжерона заданного сечения предъявляется ряд требований при назначении режимов давления, нагрева, охлаждения и выдержки при отвердении. Эти требования направлены для исключения остаточных деформаций и коробления за счет температурных напряжений и неравномерности распределения массы материала и толщин в процессе формирования лонжерона.
Тип исходных КМ для лонжеронов выбирается в зависимости от летно-технических данных вертолета. Для малонагруженных лопастей вертолетов используется дешевая стеклоткань сатинового переплетения. Для высоконагруженных лопастей используются гибридные КМ на основе высокопрочной стеклоткани, углеродной ленты и технической ткани на эпоксидном связующем.
Применение гибридных КМ позволяет основной силовой элемент — лонжерон — изготавливать с практически любым заданным распределением масс и жесткостей по длине лопасти.
В силу требований, предъявляемых к лопастям, и учитывая действующие нагрузки, хвостовые секции лопасти должны отвечать следующим требованиям: прочность конструкции, минимальная масса, жесткость конструкции, достаточный ресурс (не менее ресурса лонжерона лопастей), гладкость аэродинамической поверхности, возможность изготовления в серийном производстве, возможность ремонта в полевых условиях и др.
В эксплуатации хорошо зарекомендовали себя хвостовые секции лопасти трёхслойной сотовой конструкции. Такая секция имеет обшивку, торцевые нервюры и стрингеры из технической ткани на основе органических волокон и заполнитель из сот. Применение в конструкции хвостовых секций самого легкого КМ дает возможность снизить массу секций по сравнению со стеклопластиком и увеличить ресурс.
Большой опыт, накопленный при эксплуатации вертолетов «Ка», показал, что лопасти из КМ имеют наилучшие эксплуатационные качества. Важнейшие из них состоят в следующем:
— большой запас прочности при фактически неограниченном по условиям выносливости ресурсе. Практический срок службы лопастей из КМ определяется степенью их естественного износа, зависящего от условий эксплуатации;
— повышение срока службы не только лопастей несущего винта, но и всего вертолета за счет снижения статических и динамических нагрузок в несущей системе, благоприятных частотных характеристик и уменьшения уровня вибраций вертолета. Это обеспечивается технологическим процессом, который позволяет изготавливать лонжерон с переменными по длине формой сечения и толщиной стенки, а также применять совместно разные типы армирующего материала с разной ориентацией. Эти важнейшие качества дают существенные преимущества не только перед металлическими лопастями, но и перед другими конструкциями лопастей из КМ;
— высокая степень ремонтопригодности. Благодаря ценным свойствам КМ — высокой стойкости к концентраторам напряжений и низкой скорости разрушения материала — достигается простота и доступность ремонта даже крупных повреждений лопасти в полевых условиях;
— высокая стойкость лопастей практически ко всем видам агрессивных веществ, топливам, ядохимикатам, маслам и пр.;
— стабильность летно-технических характеристик лопасти в процессе длительной эксплуатации в любых климатических условиях. Длительный опыт эксплуатации вертолетов с лопастями из КМ показал, что изменения механических свойств материала настолько незначительны, что они не влияют ни на летно-технические характеристики, ни на срок службы лопастей.
На характеристики КМ в процессе эксплуатации оказывает влияние влажность.
ФОРМИРОВАНИЕ УПРУГО-МАССОВЫХ ХАРАКТЕРИСТИК ЛОПАСТИ НВ
Узлы и агрегаты техники
avia.pro
Физические параметры лопастей и их влияние на поведение модели.
Лопасти для вертолета как резина для автомобиля. Мягкие лопасти сглаживают реакции вертолета, делают его более ленивым. Жесткие, напротив, заставляют вертолет реагировать на управление без задержек. Тяжелые лопасти замедляют реакции, легкие обостряют. Лопасти с высоким профилем отбирают больше энергии, а с низким склонны к срыву потока, когда подъемная сила резко снижается. Выбирая лопасти, стоит учесть их параметры и выбрать те, что подойдут вашему стилю и опыту больше всего.Длина
Когда мы выбираем лопасти, то в первую очередь смотрим на их длину, поскольку длина лопасти зависит от класса вертолета. Чаще под длиной подразумевается расстояние от крепежного отверстия лопасти до ее концевой части. Некоторые немногочисленные производители указывают полную длину лопасти от комля до концевой части. К счастью таких случаев мало.От длины зависит подъемная сила, и сопротивление вращения которые создает лопасть. Длинная лопасть способна создать большую подъемную силу, но при этом отнимает больше энергии на вращение. С длинными лопастями модель стабильнее при висении и обладает большей «летучестью», т.е. способна на более крупные маневры и лучше выполняет авторотацию.
Хорда (ширина лопасти)
Важный параметр лопасти, который чаще всего не указывают вовсе, и остается только измерить хорду самостоятельно. Чем шире лопасть, тем больше подъемную силу она может создать при тех же углах атаки и тем резче вертолет при управлении по циклическому шагу. Широкая лопасть имеет более высокое сопротивление вращения и потому сильнее нагружает силовую установку. При использовании лопастей с широкой хордой важна точная работа шагом, иначе можно легко «задушить» мотор. Наибольший разброс ширины встречается у лопастей для вертолетов 50-ого класса и выше.
Длина и хорда.
Материал
Следующее, на что нужно обратить внимание, это материал, из которго сделаны лопасти. Сегодня наиболее распространенные материалы, из которых изготавливают лопасти вертолетов это карбон и стеклопластик. Деревянные лопасти постепенно сходят со сцены, так как не обладают достаточной прочностью и сильно ограничивают вертолет в летных возможностях. К тому же деревянные лопасти склонны к изменению формы, что приводит к постоянному появлению «бабочки». Пожалуй, наименьшее, на что сегодня стоит соглашаться, это стеклопластиковые лопасти. Они не страдают изменением формы, обладают достаточной жесткостью для выполнения легкого 3D и отлично подойдут начинающим вертолетчикам. Пилоты со стажем непременно выберут карбоновые лопасти как наиболее жесткие, позволяющие вертолету выполнять экстремальные фигуры высшего пилотажа и наделяют вертолет молниеносной реакцией на управление.Вес
Важный параметр — вес лопасти. При прочих равных более тяжелая лопасть сделает вертолет более стабильным, снизит скорость управления по циклическому шагу. Тяжелая лопасть добавит стабильности и размеренности и запасет больше энергии при выполнении авторотации, что сделает маневр более комфортным. Если вы стремитесь к 3D полетам, выбирайте более легкие лопасти.Форма лопасти
Прямая, трапециевидная. Чаще встречается прямая форма, трапециевидная скорее относится к экзотике. Последняя позволяет снизить сопротивление вращения ценой снижения отдачи.
Форма лопасти.
Профиль
Симметричный — высота профиля одинаковая сверху и снизу лопасти. Лопасти с симметричным профилем способны создавать подъемную силу только при ненулевом шаге. Такие лопасти наиболее распространены среди современных вертолетов и используются на всех моделях, выполняющих 3D пилотаж.Полусимметричный – снизу лопасти профиль имеет меньшую высоту. Такие лопасти способны создавать подъемную силу даже при нулевых углах атаки, т.е. Создают подъемную силу аналогично тому, как это делает крыло самолета. Такие лопасти используются редко, как правило, только на больших копийных вертолетах.
Высота профиля
Чем выше профиль, тем лучше он сопротивляется срыву потока, но тем выше его сопротивление. Деревянные лопасти обычно имеют более высокий профиль, но лишь для того, что бы обладать достаточной прочностью.
Форма профиля и его высота.
Толщина комля
Толщина комля напрямую связана с размером цапф вашего вертолета. Если комель толще, то лопасть не влезет в цапфу, если наоборот – будет болтаться. Обычно в пределах одного класса вертолетов толщина комля стандартна, тем не менее, при покупке лопастей убедитесь, что они подходят к вашему вертолету. Некоторые производители комплектуют лопасти шайбами-проставками, которые можно использовать, если посадочное место цапфы больше толщины комля. Такие шайбы надо устанавливать парами сверху и снизу комля, что бы лопасть была закреплена по центру цапфы.
Толщина комля.
Диаметр крепежного отверстия
Диаметр отверстия должен совпадать с диаметром крепежного винта цапфы. Как и толщина комля, этот параметр стандартный, тем не менее, стоит его проверить перед покупкой лопастей.Положение крепежного отверстия относительно наступающей кромки.
Определяет то, насколько наступающая кромка лопасти выступает вперед цапфы. Смещенное назад отверстие приводит к тому, что при вращении лопасть отстает от цапфы, что делает такие лопасти более стабильными. Напротив, смещение отверстия к наступающей кромке заставляет лопасть при вращении выдвигаться вперед цапфы, и такое положение делает лопасть менее стабильной.
Положение крепежного отверстия.
Форма концевой части лопасти.
Форма концевой части влияет на сопротивление вращения ротора. Различают прямую, закругленную и скошенную форму. Более прямая форма создает подъемную силу по всей длине лопасть, но и имеет наибольшее сопротивление вращения.
Форма концевой части лопасти.
Продольный центр тяжести.
Положение центра тяжести в продольном направлении. Чем ближе центр тяжести к концевой части лопасти, тем лопасть более стабильна и лучше выполняет авторотацию. Наоборот, смещение центра тяжести к комлю делает лопасть более маневренной, но страдает накопление лопастью энергии при авторотации.Поперечный центр тяжести.
Положение центра тяжесть поперек лопасти, от наступающей кромки к отступающей. Обычно стараются размещать центр тяжести так, чтобы при вращении лопасть не отставала от цапфы и не выступала вперед. Лопасть с сильно смещенным назад центром тяжести выступает при вращении вперед цапфы и, следовательно, более динамична.
Продольный и поперечный центр тяжести.
Динамическая балансировка: выступающая/отступающая лопасть.
Параметр зависит от положения крепежного отверстия, веса, положения поперечного и продольного центров тяжести. В целом, если лопасть при вращении выступает вперед цапфы, то такая лопасть более маневренная и больше подходит для 3D полетов, но отбирает больше энергии и делает вертолет недостаточно стабильным. Если напротив лопасть при вращении отстает от цапфы, то такая лопасть более стабильная. Если лопасть не отстает и не выступает, то это нейтральная лопасть. Такая лопасть наиболее универсальная и одинаково хорошо подходит как для маневров висения, так и для 3D полетов.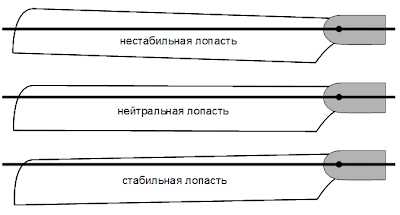
Динамическая балансировка.
Ночные лопасти.
Ночные лопасти со встроенными светодиодами и встроенным, либо съемным аккумулятором служат для комплектации вертолета для ночных полетов. Совместно с лопастями используются различные способы подсветки корпуса вертолета.Лопасти с защитным стержнем.
Стержень не дает лопасти разлетаться на отдельные части в случае падения. Очень полезный элемент безопасности, который к сожалению присутствует только в дорогих лопастях известных производителей. Случается, что обломки лопастей, не оборудованных таким стержнем, разлетаются на расстояние до 10 метров от места падения и могут привести к травме.onheli.blogspot.com
Максимальная высота полета вертолета | Техкульт
 Для того, чтобы лучше понять, какая высота является максимальной для вертолета, нужно разобраться в принципе его работы. Но сперва пару слов об истории изобретения вертолетов.
Для того, чтобы лучше понять, какая высота является максимальной для вертолета, нужно разобраться в принципе его работы. Но сперва пару слов об истории изобретения вертолетов.Немного истории
Сама идея полёта с помощью вращающегося параллельно поверхности Земли винта и создающего при этом подъёмную силу возникла задолго до появления первых самолётов. Подтверждение тому — чертежи летательного аппарата, сделанные Леонардо да Винчи на рубеже XV-XVI веков. В России вертолётной тематикой впервые занялся гениальный М. В. Ломоносов в середине XVIII века.
Однако к началу XX столетия пальму первенства надолго захватили самолёты. Чтобы «догнать» их и утвердиться вертолётам понадобилось без малого полвека. Все споры о том, кто из них лучше, лишены основания только потому, что эти машины по-разному летают.
Суть вопроса в способе создания необходимой подъёмной силы. Если у самолёта это происходит с помощью крыла, то у вертолёта – благодаря несущим винтам, приводимым в движение поршневым или турбовинтовым двигателем. Основному достоинству самолётов – скорости, вертолёт противопоставляет свои, не менее весомые козыри – способность вертикально взлетать и садиться без традиционного разбега, зависать в воздухе и перемещаться в любом направлении.
Сколько у вертолёта потолков
Термин «потолок» в самолетной авиации означает некую предельную высоту, которую способен достичь летательный аппарат. У вертолёта всё несколько сложнее, поэтому у него несколько потолков.
Первый потолок – статический. Его вертолёт достигает строго вертикально, не совершая горизонтальных перемещений. Второй – динамический. В этом случае набор высоты происходит в процессе полёта по наклонной траектории. Неслучайно, что в разделе технических характеристик вертолёта «потолки» стоят отдельно и численно заметно отличаются друг от друга.
В обоих случаях потолки имеют свои максимальные пределы. Ограничения связаны с опасностью общего срыва воздушного потока с лопастей. Чем выше поднимается вертолёт, тем на большие углы атаки разворачиваются лопасти для создания нужной подъёмной силы. «Висеть» вертолёту предпочтительнее на малых высотах при взлёте, посадке и в особых случаях.
На предельных высотах
В силу особой аэродинамики у вертолётов предельные высотные характеристики (по сравнению с самолётами) ограничены примерно 6000 метрами. Правда не обошлось и без рекордов. Так в 1972 году во Франции Жан Буле на своём Aerospatiale SA 315B превысил более чем вдвое данный показатель, достигнув высоты почти 12,5 тыс. метров. Однако тот рекордный полёт чуть не закончился трагически: двигатель загорелся, и только высочайший профессионализм позволил пилоту посадить вертолёт.
В повседневной жизни с такими высотами вертолётчики не имеют дела. Да это и не нужно. Обычно забираться выше 3000 метров им приходится при работе или ведении боевых действий в гористой местности. Существующие инструкции допускают взлёт и посадку с площадок, расположенных не выше 4500 метров, а уже при высоте свыше 3000 метров при посадке лётчикам запрещается выключать двигатели.
У российских вертолётов с высотой всё в порядке. Так многоцелевой транспортник Ми-26 без труда забирается на высоту 6,5 км. У его боевых «собратьев» — Ка-50 и Ка-52 этот показатель равен 5,7 км у Ми-28 – 5,8 км. Не менее достойно выглядит американский АН-64 Apache – 6,4 км.
www.techcult.ru
Что дает увеличение количества лопастей у вертолета?
заполнение ометаемой площади
Большую площадь и как следствие увеличенную подъемную силу.
вообще-то — одно безобразие, воздух не успевает успокоиться между лопастями, лопасти оказываются в турбулентности.
Грузоподъёмность минус маневренность .
Можно применять менее оборотистые двигатели.
Ничего хорошего.
применяют только по одной причине: идеальный пропеллер — однолопастной. Но его балансировать запаришься. Поэтому делают двухлопастные. Предельная длина лопасти ограничена оборотами, т. к. если законцовка выйдет на сверхзвук, то потеряет всю свою подъёмную силу. А раз бесконечно увеличивать обороты несущего винта нельзя, то приходится ради грузоподъемности ставить много лопастей. Ну и диаметр получается меньше, что позволяет садиться на более компактные площадки. А кроме того, на длинных лопастях вылазят проблемы прочности лопасти. В итоге двухлопастные винты остаются уделом лёгких вертолётов. А если надо грузоподъёмность поднять ещё больше, то приходится ставить несколько несущих винтов, т. к. сильно количество лопастей не увеличишь из-за выше описанных проблем с турбулентностями и всяких там индуктивных сопротивлениий.
touch.otvet.mail.ru
Об особенностях проектирования скоростных вертолетов
В публикации http://maxpark.com/community/547/content/2736361 говорилось, что в России приступили к разработке перспективного скоростного вертолета. Данная статья более подробно развивает эту тему.
В публикации http://www.plam.ru/transportavi/vzlyot_2009_08_09/p11.php сообщается, что журнал «Взлёт» уже рассказывал о работах по проектированию перспективных скоростных вертолетов, ведущихся обоими конструкторскими центрами ОАО «Вертолеты России» (дочернее предприятие ОАО «ОПК «Оборонпром») — фирмой «Камов», разрабатывающей проект Ка-92, и МВЗ им. М.Л Миля, работающим по теме Ми-Х1. Несмотря на разные подходы и отличающиеся технические решения, эти исследования имеют одну цель: создание вертолета, способного летать заметно быстрее — достигать в крейсерском полете скорости 450–500 км/ч. Главный редактор «Взлёта» Андрей Фомин встретился с генеральным конструктором ОАО «Камов» Сергеем Михеевым и попросил его рассказать о новых проектах и особенностях работ по скоростным вертолетам в целом. И хотя данному интервью уже несколько лет, описанные в нем проблемы с тех пор пока сохранены, а само интервью не потеряло своей актуальности.
Сергей Викторович, к проектированию скоростных вертолетов в последнее время обратились сразу несколько ведущих вертолетостроительных компаний мира. С чем связан такой интерес к этому направлению развития винтокрылой техники?
На самом деле работа по совершенствованию вертолета, направленная на увеличение скорости его полета, ведется в мире уже довольно давно. Перепробовано много идей и решений. Например, фирма «Белл» занимается своей концепцией аппарата вертикального взлета и посадки с поворотными винтами еще с 50-х гг. прошлого столетия — и, надо отдать должное, уже достигла определенных результатов. Помимо ряда экспериментальных моделей ей создан, запущен в серийное производство и поставляется Вооруженным силам США конвертоплан «Оспри», способный летать со скоростью более 500 км/ч. На основе его концепции совместно с итальянской компаний «Агуста» создан коммерческий конвертоплан BA609, который намечено сертифицировать для поставок заказчикам в следующем году.
Другая знаменитая американская вертолетостроительная фирма — «Сикорский» — еще при жизни своего основателя, в 1972 г., спроектировала экспериментальный вертолет S-69 (XH-59A), реализующий принципиально иной подход к решению задачи повышения скорости полета, — машину с так называемыми жесткими соосными несущими винтами и отдельным (в данном случае — реактивным) движителем для обеспечения горизонтальной составляющей скорости. Сформированная тогда «концепция наступающей лопасти» (ABC) недавно получила развитие уже на новом, втором этапе программы, идеологически не отличающемся от прежнего, но реализованным на современной технологической базе: в прошлом году совершил первый полет экспериментальный вертолет «Сикорского» Х2 с жесткими соосными несущими винтами, которые работают в процессе всего полета, не меняя своего положения, и дополнительным толкающим пропеллером для создания пропульсивной силы.
Работают по тематике скоростных вертолетов и другие «гранды» мирового вертолетостроения. Так, недавно стало известно о программе Х3, ведущейся западноевропейским концерном «Еврокоптер». Естественно, не могут остаться в стороне от мировых тенденций и российские вертолетостроители. Еще на прошлом авиасалоне МАКС-2007, в августе2007 г., наша фирма «Камов» впервые продемонстрировала модель своего видения концепции скоростного вертолета — машины Ка-92. Несколько позднее к подобным работам приступили и наши коллеги с МВЗ им. М.Л. Миля, предлагающие проект Ми-Х1.
С чем связан такой интерес к скоростным вертолетам? Я бы поставил вопрос несколько шире. Главная проблема на пути создания перспективных вертолетов — не столько повышение скорости полета как таковой, а увеличение аэродинамического качества несущего винта и вертолета в целом. Повышение скорости — это частная задача. Ведь для сохранения конкурентных преимуществ вертолетов на фоне бурно развивающегося самолетостроения нам предстоит летать не только быстрее, но и дальше, и поднимать при этом большую нагрузку. Ведь именно эти показатели в комплексе определяют коммерческую привлекательность того или иного летательного аппарата. И только комплексное решение задачи повышения аэродинамического качества (за счет применения новых схем несущего винта, новых подходов к обеспечению поступательного полета, улучшения всей аэродинамики вертолета, использования более эффективных силовых установок и т. п.) даст нам тот выигрыш в скорости, дальности и грузоподъемности, который позволит говорить о создании нового поколения вертолетной техники — с принципиально новыми характеристиками и конкурентными преимуществами на рынке.
Для того, чтобы решать новые задачи, оставаться конкурентоспособным на рынке, надо четко представлять себе все возникающие проблемы и искать пути их решения. За последние три десятилетия все это очень тщательно изучалось, и сегодня проблемы, стоящие на пути создания скоростного вертолета, ведущие компании мира четко представляют. И каждая из этих фирм, так или иначе, основываясь на своем опыте, традициях, взглядах на создание винтокрылой техники, ищет свое принципиальное решение, как продвинуться в решении данной проблемы.
Каковы основные препятствия на пути повышения скорости сегодняшних вертолетов?
Основных препятствий несколько. Главное связано с кинематикой работы шарнирного несущего винта и известно как «ограничение по срыву». При горизонтальном полете вертолета на части диска, ометаемого несущим винтом, лопасти обтекаются потоком с повышенными скоростями, т. е. скорость полета и окружная скорость вращения винта складываются, на другой — с пониженными, когда эти скорости вычитаются. Для выравнивания ассиметрии аэродинамической нагрузки по диску винта лопасти крепят к втулке через горизонтальный шарнир. Там, где обтекание лопасти идет с повышенными скоростями, за счет махового движения лопастей углы атаки сечений лопасти и аэродинамические силы снижаются. Там, где скорости обтекания уменьшаются, маховое движение приводит к увеличению углов атаки сечений лопастей и росту аэродинамических сил. Это и смягчает неравномерность скорости обтекания лопастей по диску. С ростом скорости полета маховое движение лопастей увеличивается и углы атаки в некоторых сечениях могут достигнуть критической величины, после которой наступает срыв потока. Работа винта на таких режимах сопровождается целой группой негативных эффектов, и их стараются не допустить соответствующим выбором параметров при проектировании вертолета.
Можно ли продвинуться дальше по скорости на одновинтовом вертолете с шарнирным винтом классической конфигурации при запасе мощности на борту? Можно. Для этого надо увеличить окружную скорость вращения винта или уменьшить взлетную массу. Но не первое, ни второе не приводят к радикальным результатам. Так, увеличение окружной скорости ограничено числом М, которое должно быть меньше 1 для скорости потока на конце наступающей лопасти, а уменьшение массы приводит к прямому снижению эффективности вертолета как транспортного средства.

Вторым препятствием на пути повышения скорости полета вертолета является увеличение так называемой зоны обратного обтекания, т. е. зоны, где сечения лопасти обтекаются уже не с носка профиля, а с «хвостика». Например, при скорости полета 520 км/ч до 80 % лопасти будет находится в этой зоне и обтекаться с хвостика профиля, снижая аэродинамическое качество винта и ставя проблему балансировки вертолета в ряд главных.
Еще одна проблема увеличения скорости полета вертолета связана со снижением эффективности несущего винта как средства создания пропульсивной силы. На скоростях более 350 км/ч отмечается существенное падение «пропульсивного» коэффициента полезного действия несущего винта.
Кроме перечисленных «физических» ограничений существует ряд препятствий конструкторского характера. Например, создание несущей системы, способной отклонять результирующую силу винта для создания пропульсивной силы на углы более 20° в приемлемых габаритах, является очень сложной конструкторской задачей.
Какие же способы решения стоящих задач Вы видите?
Ка-92
Основные расчетные данные
Тип двигателей ВК-3000
Мощность, л. с 2х3200
Взлетная масса, кг 16 000
Число пассажиров 30
Максимальная скорость полета, км/ч 460
Крейсерская скорость, км/ч 420
Дальность полета, км 1400
Подходы могут быть разными. О концепции американской фирмы «Белл» я уже говорил. Но схема конвертоплана, все-таки, это уже уход немного в сторону от классического вертолета. К этому стоит добавить значительно более высокую стоимость подобных летательных аппаратов, большую массу при той же грузоподъемности, еще более строгие требования к надежности и безопасности полета, например в ситуации с отказом двигателя на режимах висения и полета с малыми скоростями.
Нам, на фирме «Камов», ближе подход, выбранный «Сикорским». В нашем проекте Ка-92 мы остаемся верны нашей «фирменной» схеме с соосными несущими винтами, хотя винт на Ка-92 уже совсем не такой, как на других вертолетах «Камова». Как и у «Сикорского», мы остановили свой выбор на так называемом жестком несущем винте. У него уже нет традиционных горизонтальных шарниров крепления лопастей, соответственно сведены к минимуму маховые движения лопастей (таким образом, в частности, решается задача предотвращения срывного обтекания отступаю щей лопасти). Сами лопасти стали короче и заметно жестче — это стало возможным благодаря применению самых современных композиционных материалов. Законцовки лопастей имеют особую форму — этим мы отодвигаем негативные последствия приближения скорости звука. Рассматриваем также вопрос управления скоростью вращения несущего винта, предусматривающего уменьшение его оборотов в крейсерском полете с высокой скоростью.
Кроме того, мы не используем несущий винт для обеспечения горизонтальной составляющей скорости — для этого на Ка-92 в хвостовой части установлен соосный толкающий воздушный винт. Он приводится в действие посредством трансмиссии от тех же двигателей, которые через редуктор вращают и жесткий соосный несущий винт. «Облагорожена» вся аэродинамика вертолета: фюзеляж его выполнен более обтекаемым, шасси сделано убирающимся, благодаря применению более коротких и жестких лопастей уменьшена высота колонки несущих винтов, а сама втулка и конструктивные элементы крепления и управления лопастями закрыты обтекателями. Все эти решения, по нашим расчетам, позволят получить на Ка-92 максимальную скорость полета не менее460 км/чи крейсерскую — порядка 420 км/ч. Сравните с нынешними 250–270 км/ч у большинства современных вертолетов! При этом Ка-92, имеющий взлетную массу 16 т, сможет брать на борт 30 пассажиров и перевозить их на расстояние до 1400 км.
Таким образом, нашу концепцию скоростного вертолета можно определить несколькими основополагающими моментами: жесткие бесшарнирные соосные несущие винты с новыми принципами управления, толкающий воздушный винт для обеспечения горизонтальной составляющей скорости и общее совершенствование аэродинамики вертолета.
Но подходы к решению задачи повышения скорости полета вертолета могут быть разными. Например, наши коллеги с МВЗ им. М.Л. Миля в своем проекте Ми-Х1 остаются верны одновинтовой схеме с шарнирным креплением лопастей несущего винта в целом традиционной конструкции. Для предотвращения срыва потока на отступающей лопасти ими разрабатывается оригинальное устройство, позволяющее блокировать ее «вредное» маховое движение (так называемая система SLES), а работающая на околозвуковых скоростях наступающая лопасть будет иметь стреловидную законцовку особого профиля. Но, как и у нас на Ка-92, для обеспечения поступательной скорости у Ми-Х1 будет толкающий винт в хвостовой части, который одновременно будет выполнять роль традиционного рулевого винта, т. е. средства компенсации разворачивающего момента. У нас, на Ка-92, с его аэродинамической симметрией, благодаря использованию соосных несущих винтов, как и на большинстве других вертолетов «Камова», этого момента нет по определению.
Тем не менее, создавая научно-технический задел Ка-92, мы нашли ряд новых приложений технологии скоростных вертолетов. Это демонстрирует идея скоростного вертолета продольной схемы Ка-102, которую мы впервые демонстрируем на МАКС-2009.
Расскажите, пожалуйста, поподробней об этом проекте.
Как и Ка-92, предлагаемый нами новый проект Ка-102 предусматривает применение бесшарнирных жестких несущих винтов и отдельных движителей для обеспечения горизонтальной скорости. Но, если Ка-92 выполняется по соосной схеме, то Ка-102 — уже по продольной. Один несущий винт размещается в передней части фюзеляжа, а вращающийся в противоположную сторону второй — в задней. Таким образом, если на Ка-92 возникающие моменты «замыкаются» в колонке несущих винтов, то у Ка-102 они будут восприниматься фюзеляжем, как, например, у строившегося когда-то транспортного вертолета Яковлева Як-24 или продолжающегося выпускаться и поныне американского «Чинука». Но в отличие от «Чинука», наш Ка-102 сможет летать гораздо быстрее — благодаря тем же, в целом, техническим решениям, что нами уже разработаны для Ка-92, а именно бесшарнирным жестким несущим винтам с новыми принципами управления и дополнительным винтовым движителям для обеспечения горизонтальной составляющей скорости.
По нашим расчетам, Ка-102 сможет иметь скорость до 500 км/ч. При этом он будет перевозить до 80–90 пассажиров, имея взлетную массу порядка 30 т. Имеющий компактные размеры соосный вертолет хорош для перевозки относительно небольшого числа пассажиров и грузов (в нашем случае — до 30 человек). А продольная схема позволяет иметь более длинный фюзеляж, в котором с комфортом разместится значительно большее количество пассажиров.
Силовая установка Ка-102 так же будет единой — это будут два газотурбинных двигателя, которые посредством трансмиссии приводят во вращения оба несущих винта, а также два тянущих воздушных винта (нечто подобное нами уже было реализовано полвека назад на знаменитом винтокрыле Ка-22, который, правда, выполнялся по поперечной схеме и мог летать со скоростью350 км/ч).
Таким образом, при всей внешней разнице двух наших новых проектов, философия у них будет одна — жесткий бесшарнирный несущий винт и отдельные винтовые движители для обеспечения поступательного полета.

Основные расчетные данные
Тип двигателей… 2хГТД
Взлетная масса, кг 30 000
Число пассажиров. 80–90
Максимальная скорость полета, км/ч до 500
Есть ли резервы для дальнейшего повышения скорости вертолетов? Как быстро смогут летать винтокрылые аппараты в будущем?
Прорабатываемые в настоящее время технические решения — как на фирме «Камов», так и на МВЗ им. М.Л. Миля — должны обеспечить повышение скорости полета вертолетов с нынешних 300 км/ч примерно до 500 км/ч. Но для этого придется еще многое пройти. Путь от сегодняшних проектов до первых полетов, будь то Ка-92 или Ми-Х1, может занять, по нашим оценкам, не менее пяти-семи лет. Предстоит проработать многие технические вопросы, испытать их в стендовых условиях, а затем на летающих лабораториях. Это относится, в нашем случае, в первую очередь, к конструкции жесткого несущего винта, системе его управления.
Я уже говорил, что нами, например, рассматривается вопрос управления оборотами несущего винта: на этапах вертикального взлета они должны быть максимальными, обеспечивая наибольшую подъемную силу, а при полете с высокой скоростью, для предотвращения попадания наступающей лопасти в режим околозвукового обтекания, их нужно уменьшать. Кроме того, в перспективе предстоит перейти к более сложным законам управления лопастями несущего винта — привычное циклическое изменение шага, изобретенное еще в начале прошлого века нашим великим соотечественником профессором Б.Н. Юрьевым и нашедшее практическое применение в виде автомата перекоса на всех ныне летающих вертолетах, может быть дополнено более сложными алгоритмами, вычисляемыми в каждый момент времени бортовыми компьютерами. Подобное управление несущим винтом позволит лопастям в каждой точке диска занимать наиболее выгодное положение по углу атаки, обеспечивая наилучшие аэродинамические характеристики. В качестве летающей лаборатории для отработки таких решений вполне подойдет, например, самый скоростной из наших сегодняшних вертолетов — Ка-50 (максимальная скорость при полете со снижением — до 350 км/ч), который посредством установки дополнительных движителей (например, турбореактивных двигателей в районе крыла) можно будет разогнать еще на 100–150 км/ч.
Если же заглянуть еще дальше, то, думаю, не все резервы исчерпаны. Вертолет в будущем сможет летать и быстрее 500 км/ч. Однако если при 350–500 км/ч оптимальным средством обеспечения горизонтальной составляющей скорости вертолета является воздушный винт, то, скажем, при полете с 600–700 км/ч целесообразней будет иметь уже для этого двухконтурные турбореактивные двигатели. Чтобы летать еще быстрее, нужно будет уже убирать несущий винт. Проработки таких вертолетов мы делали уже довольно давно. Наверное, Вы заметили на прошлогодней выставке HeliRussia 2008 модель Ка-90 — это как раз один из вариантов реализации такой концепции. Подобный летательный аппарат поднимается в воздух с помощью несущего винта, но затем, при достижении определенной скорости, подъемную силу начинает обеспечивать выдвигающееся из фюзеляжа крыло, а поступательный полет — реактивный двигатель. Несущий винт становится уже «лишним» — его лопасти, для уменьшения сопротивления, укладываются на верхней поверхности фюзеляжа. Но, уверен, несущий винт все равно сохранится: его эффективность на режимах вертикального взлета и посадки в любом случае гораздо выше, чем у реактивных двигателей вертикально взлетающих самолетов-истребителей.
Однако, вышесказанное — это пока еще весьма далекая перспектива. Пока же мы ведем речь о создании вертолета, способного летать со скоростью 450–500 км/ч. ОАО «Вертолеты России» определило эту задачу одной из важнейших тем перспективных НИОКР холдинга. Очень надеюсь, что наши наработки по Ка-92 не пропадут даром и лягут в основу перспективного российского скоростного вертолета.
А как у них?
Жесткий винт «Сикорского»
Впервые об идее построить вертолет с жестким бесшарнирным несущим винтом соосной схемы стало известно в феврале 1972 г., когда компания «Сикорский» официально заявила о получении соответствующего контракта от научно-исследовательской лаборатории проблем аэромобильности Армии США (Army Air Mobility Research and Development Laboratory). Экспериментальный вертолет, получивший название S-69 (XH-59A), строился для практической оценки разработанной «Сикорским» так называемой «концепции наступающей лопасти» (Advancing Blade Concept, ABC), предусматривающей оснащение машины соосным жестким бесшарнирным несущим винтом. Упразднение шарниров крепления лопастей (за исключением осевого — для управления углом атаки лопастей) должно было минимизировать маховое движение лопастей и, как следствие, исключить срывные явления на отступающей лопасти при повышении поступательной скорости полета, повысив одновременно несущие свойства наступающей лопасти (отсюда и название концепции). Поскольку реализовать конструкцию жесткого бесшарнирного несущего винта на одновинтовом вертолете не представлялось возможным (подъемная сила несущего винта создавалась бы только с одного борта вертолета — со стороны наступающих лопастей, что неизбежно «валило» бы машину на другой борт), компания «Сикорский» решила применить соосную компоновку, которая обеспечивала полную аэродинамическую симметрию, отсутствие необходимости в рулевом винте, а заодно позволяла уменьшить размеры несущего винта, потребного для создания той же подъемной силы. Для обеспечения пропульсивной силы вертолет планировалось оснастить двумя дополнительными турбореактивными двигателями.
Экспериментальный вертолет XH-59A, оснащенный одним турбовальным двигателем PT6T-3 «Турбо Твин Пак» мощностью 1825 л.с. компании «Пратт-Уитни Канада» совершил первый полет 26 июля1973 г., однако уже через месяц, 24 августа, потерпел аварию. Второй экземпляр машины, воплотивший ряд конструктивных доработок, впервые поднялся в воздух 21 июля1975 г. Спустя полтора года, в марте 1977-го, по бортам его фюзеляжа установили два турбореактивных двигателя J60-P-3A тягой по 1360 кгс. Испытания его в таком виде начались в1978 г. Без применения «пропульсивных» реактивных двигателей XH-59A продемонстрировал максимальную скорость в горизонтальном полете около340 км/чи при полете со снижением — около 410 км/ч. Использование ТРД позволило поднять скорость вертолета до 507 км/ч(в снижении — почти до 600 км/ч). В испытаниях вертолета принимали участие специалисты НАСА, Армии и ВМС США.
В дальнейшем, в1982 г., экспериментальный вертолет было решено переоборудовать под два турбовальных двигателя T700-GE-700, которые должны были приводить во вращение через систему трансмиссии не только соосный несущий винт, но и толкающий воздушный винт в кольцевом канале за хвостовым оперением (вместо применявшихся ранее для создания пропульсивной силы двух турбореактивных двигателей). Вертолет получил название XH-59B, однако до его летных испытаний дело не дошло.
Тем не менее концепция, отрабатывавшаяся на экспериментальных вертолетах XH-59A/B, не была забыта и получила второе дыхание при реализации проекта Х2, о начале работ по которому компания «Сикорский» объявила в июне 2005г. Как и свои предшественники тремя десятилетиями раньше, Х2 оснащается жестким бесшарнирным соосным несущим винтом, а пропульсивную силу обеспечивает толкающий винт за хвостовым оперением. Разумеется, вся конструкция машины выполнена на новом технологическом уровне, с использованием новейших материалов и технических решений.

Пока Х2 представляет собой исключительно экспериментальный вертолет и способен поднимать в воздух всего два человека. Взлетная масса машины составляет лишь 2400 кг, а силовую установку составляет один турбовальный двигатель Т800-801 мощностью 1450 л.с. Однако в дальнейшем на основе отработанной на Х2 концепции «Сикорский» предполагает создать целое семейство скоростных вертолетов различного назначения — от боевого ударного до транспортных и даже беспилотных аппаратов, имеющих скорость полета 450–500 км/ч.
Небольшая справка.
В 1972 году компания Sikorsky спроектировала вертолет S-69, выиграв контракт на две опытные машины XH-59A для оценки роторной системы, включавшей два трехлопастных жестких несущих винта противоположного вращения и двигатель Pratt & Whitney Canada PT6T-3 Turbo Twin Pac мощностью 1361кВт. Вертолету S-69 не нужен был рулевой винт, он имел обычное горизонтальное оперение с разнесенными килями и рулями направления. Дополнительная тяга обеспечивалась двумя турбореактивными двигателями Pratt & Whitney J60-P-3A тягой 1361кг, вмонтированными в гондолы с каждой стороны фюзеляжа. В таком виде он продемонстрировал скорость 488км/ч. В 1982 году эти аппараты были разработаны по новой конфигурации XH-59B с усовершенствованными винтами, новой силовой установкой и туннельным толкающим воздушным винтом на хвостовом оперении.
Технические данные Sikorsky XH-59
Экипаж: 2, силовая установка: 1xГТД Pratt Whitney of Canada PT6T-3 Turbo Twin Pac мощностью на валу 1360кВт и 2хТРД Pratt & Whitney J60-P-3A тягой по 1350кг, диаметр несущих винтов: 10.97м, длина фюзеляжа: 12.42м, высота: 4.01м, взлетный вес: 4960кг, максимальная скорость: 518км/ч, потолок: 4570м
maxpark.com