
Классификация БПЛА по летных характеристикам — Документация Pioneer September update 2021
Беспилотные летательные аппараты различают не только по способу их применения в определённых сферах нашей жизни или различием конструкции , но и по более устойчивым параметрам и характеристикам, например, взлетной массе, дальности, высоте и продолжительности полета, размерам самих аппаратов и т.д.
Классификация UVS International
Международной ассоциацией по беспилотным летательным системам UVSI (Association for Unmanned Vehicle Systems International, до 2004 года она называлась Европейской ассоциацией по беспилотным системам – EURO UVS) была предложена универсальная классификация БПЛА (Таблица 1), которая объединяет многие из названных критериев.
Таблица 1
| Группа | Категория | Взлетная масса, кг | Дальность полета, км | Высота полета, м | Продолжительность полета, ч |
| Малые БПЛА | Nano БПЛА | < 0,025 | < 1 | 100 | < 0,5 |
| Micro БПЛА | < 5 | < 10 | 250 | 1 | |
| Mini БПЛА | 20 — 150 | < 30 | 150 — 300 | < 2 | |
| Легкие БПЛА для контроля переднего края обороны | 25- 150 | 10 — 30 | 3000 | 2 — 4 | |
| Легкие БПЛА с малой дальностью полета | 50 – 250 | 30 -70 | 3000 | 3 — 6 | |
| Средние БПЛА | 150 — 500 | 70 — 200 | 5000 | 6 — 10 | |
| Тактические | Средние БПЛА с большой продолжительностью полета | 500-1500 | >500 | 8000 | 10 — 18 |
| Маловысотные БПЛА для проникновения в глубину обороны противника | 250 2500 | >250 | 50 — 9000 | 0,5 — 1 | |
| Маловысотные БПЛА с большой продолжительностью полета | 15 — 25 | >500 | 3000 | >24 | |
| Средневысотные БПЛА с большой продолжительностью полета | 1000-500 | > 500 | 5000-8000 | 24 — 48 | |
| Высотные БПЛА с большой продолжительностью полета | 2500-5000 | > 2000 | 20000 | 24 — 48 | |
| Стратегические | Боевые (ударные) БПЛА | >1000 | 1500 | 12000 | 2 |
| БПЛА, оснащенные боевой частью (летательного действия) | 300 | 4000 | 3 — 4 | ||
| БПЛА – ложные цели | 150 – 500 | 0 — 500 | 50 — 5000 | < 4 | |
| Специального назначения | Стратосферные БПЛА | > 2500 | > 2000 | > 20000 | > 48 |
| Экзостратосферные БПЛА | > 30500 |
Приведенная выше классификация на сегодняшний день распространяется, как
на уже существующие, так и на будущие разрабатываемые модели БПЛА. В
основном эта классификация сложилась к 2000 г., когда беспилотные
аппараты только набирали популярность, но с тех пор много раз
пересматривалась. Ее и сейчас нельзя считать устоявшейся. Кроме того,
многие особые типы аппаратов с нестандартными комбинациями параметров
трудно отнести к какому-либо определенному классу.
В
основном эта классификация сложилась к 2000 г., когда беспилотные
аппараты только набирали популярность, но с тех пор много раз
пересматривалась. Ее и сейчас нельзя считать устоявшейся. Кроме того,
многие особые типы аппаратов с нестандартными комбинациями параметров
трудно отнести к какому-либо определенному классу.
Российская универсальная классификация
Для сравнения, на сегодняшний день сложилась и Российская классификация БПЛА, которая ориентирована преимущественно, пока только на военное назначение аппаратов (Таблица 2):
Таблица 2
| Категория | Взлетная масса, кг | Дальность действия, км |
| Микро и мини БПЛА ближнего действия | 0 — 5 | 25 — 40 |
| Легкие БПЛА малого радиуса действия | 5 — 50 | 10 — 70 |
| Легкие БПЛА среднего действия | 50 — 100 | 70 – 150 (250) |
| Средние БПЛА | 100 — 300 | 150 — 1000 |
| Средне – тяжелые БПЛА | 300 – 500 | 70 – 300 |
| Тяжелые БПЛА среднего радиуса действия | < 500 | 70 — 300 |
| Тяжелые БПЛА большой продолжительности полета | < 1500 | 1500 |
| Беспилотные боевые самолеты | < 500 | 1500 |
Российская классификация отличается от предложенной UVS International по
ряду параметров – упразднены группы БПЛА, некоторые классы зарубежной
классификации отсутствуют в РФ, легкие БПЛА в России имеют значительно
большую дальность и т.
Понятно, что у каждый БПЛА выполняет свои поставленные задачи, будь то Микро- дрон, который мы купили в магазине, чтобы только научиться его пилотировать или же Легкий квадрокоптер, который выполняет доставку небольшого груза. Далее мы рассмотрим уже с вами типы БПЛА, которые наиболее популярны в мире или оказали значительный вклад в развитии новых типов беспилотников.
2.2 Правила регистрации БПЛА в РФ. Согласование полётов.
Одна из наиболее важных тем — закон о беспилотных летательных аппаратах в России.
До недавнего времени, мало кто из пилотов понимал, что же будет с его дроном и с ним самим, если полет не согласовывать, БПЛА не регистрировать и т.д. Довольно долго законопроект в России был в разработке и многие из нас томились ожиданиями, что же им делать сейчас и что будет потом, после его принятия.
В 2019 году Государственная Дума приняла законопроект, который
предотвращает использование беспилотных воздушных судов в противоправных
целях.
Заявление необходимо подать в течение 10 рабочих дней со дня приобретения БВС на территории России либо с момента его ввоза на территорию РФ, если покупали дрон за рубежом. Если вы сделали БВС самостоятельно, то необходимо поставить его на учет до того, как начнете запускать изобретение в воздух.
Согласование полетов.
Для осуществления полетов дронов и квадрокоптеров необходимо получить
специальное разрешение на использование воздушного пространство. Разрешение выдает Зональный центр Единой системы организации воздушного
страхования. Если вес дрона или квадрокоптера больше 30 кг, его нужно
обязательно зарегистрировать. Параллельно с этим владелец (внешний
пилот) должен получить сертификат летной годности и свидетельство
внешнего пилота, чтобы иметь возможность управления коптером.
Разрешение выдает Зональный центр Единой системы организации воздушного
страхования. Если вес дрона или квадрокоптера больше 30 кг, его нужно
обязательно зарегистрировать. Параллельно с этим владелец (внешний
пилот) должен получить сертификат летной годности и свидетельство
внешнего пилота, чтобы иметь возможность управления коптером.
Чтобы запустить дрон или квадрокоптер над населенным пунктом, нужно в обязательном порядке получить разрешение от органов местного самоуправления. За сутки до предполагаемого полета следует подать представление на установление режима полета в зональный центр по организации воздушного движения. За 2 часа до вылета внешний пилот должен связаться с диспетчером.
Есть места, где использование квадрокоптеров, дронов и других беспилотных летательных аппаратов полностью запрещено:
- Аэропорты и вокзалы
- Опасные производства
- Военные объекты
- Стратегические государственные объекты
Классификация БПЛА по конструкции
Как известно на сегодняшний день существует большое количество типов
БПЛА, различной конструкции, предназначенные для множество разных задач.
В данном разделе мы с вами рассмотрим самые известные из них, которые приобрели наибольшую популярность и доказали свою превосходность относительно других типов.
Различают следующие типы БПЛА, отличающихся конструкцией и принципом работы, взлета/посадки и назначения:
- БПЛА самолетного типа
- Мультироторные БПЛА
- БПЛА Аэростатического типа
- Беспилотные конвертопланы и гибридные модели
Рассмотрим ниже каждый из этих типов.
БПЛА самолетного типа
Такой тип аппаратов известен также как БПЛА с жестким крылом (англ.: fixed-wing UAV). Подъемная сила у них создается аэродинамическим способом за счет напора воздуха, набегающего на неподвижное крыло. Аппараты такого типа, как правило, отличаются большой длительностью полета, большой максимальной высотой полета и высокой скоростью.
Существует большое разнообразие подтипов БПЛА самолетного типа,
различающихся по форме крыла и фюзеляжа. Практически все схемы
компоновки самолета и типы фюзеляжей, которые встречаются в пилотируемой
авиации, применимы и в беспилотной.
Рисунок — самолет Proteus
На рисунке 1 показан экспериментальный многоцелевой самолет Proteus разработки американской компании Scaled Composites. Разработаны как пилотируемый, так и беспилотный варианты этого самолета. Особенностью конструкции является тандемная схема расположения крыльев. Его длина составляет 17,1 м, размах задних крыльев 28 м, потолок высоты 16 км (при нагрузке 3,2 т), взлетная масса 5,6 т, максимальная скорость 520 км/ч (на высоте 10 км), длительность полета до 18 ч. Силовая установка – два турбореактивных двигателя с тягой по 10,2 кН .
Рисунок 2 — БПЛА RQ-4 Global Hawk
На рисунке 2 показан разведывательный БПЛА RQ-4 Global Hawk,
разработанный американской фирмой Teledyne Ryan Aeronautical, дочерним
предприятием компании Northrop Grumman. Он отличается необычной формой
фюзеляжа, в носовой части которого размещено радиолокационное,
оптическое и связное оборудование. Аппарат изготовлен из композитных
материалов на основе углеволокна и алюминиевых сплавов, имеет длину 13,5
м, размах крыльев 35 м, взлетную массу около 15 тонн, способен нести
полезную нагрузку массой до 900 кг.
Рисунок — БПЛА Х-47В
На рисунке 3 показан перспективный боевой палубный БПЛА Х-47В,
разрабатываемый компанией Northrop Grumman (США). Он имеет форму широко
выгнутой буквы «V» без хвостовой части. Крылья могут складываться, что
немаловажно для ограниченной площади палубы авианосца. Для управления
полетом БПЛА оснащен 6-ю рабочими плоскостями. Турбореактивный двигатель
канадской фирмы Pratt amp. Whitney обеспечивает высокую скорость полета
беспилотного аппарата и расположен в задней части аппарата. Беспилотник
состоит из четырех частей, собранных из композитных материалов и
соединяющихся примерно в середине корпуса. Самолет имеет длину 11,6 м,
размах крыльев 18,9 м (в сложенном состоянии 9,4 м), собственную массу
6,3 т, максимальную взлетную массу 20,2 т. Крейсерская скорость
составляет 900 км/ч. Радиус действия 3900 км. Потолок 12,2 км.
Предположительно аппарат будет приспособлен для выполнения дозаправки в
воздухе. При этом БПЛА будет готов при необходимости беспрерывно
выполнять поставленную боевую задачу в течение 80 часов, что на порядок
больше длительности полета боевых самолетов с пилотами.
Радиус действия 3900 км. Потолок 12,2 км.
Предположительно аппарат будет приспособлен для выполнения дозаправки в
воздухе. При этом БПЛА будет готов при необходимости беспрерывно
выполнять поставленную боевую задачу в течение 80 часов, что на порядок
больше длительности полета боевых самолетов с пилотами.
Компания «Геоскан» разработала сразу несколько беспилотников самолетного типа. Один из них «Геоскан 201» (на рисунке 4). Он предназначен для получения геопривязанных фотографий отдельных объектов, площадной и линейной аэрофотосъемки, развивает скорость до 130 км/ч, а продолжительность полета может достигать до 3-х часов.
Полученные с использованием комплекса материалы могут использоваться для:
- создания ортофотопланов масштаба 1:500 — 1:2000;
- трехмерного моделирования участка местности;
- создания карт высот местности;
- вычисления объемов пород в карьерах и насыпных объектах;
- обследования состояния объектов инфраструктуры, дорожного полотна;
- инвентаризации лесов и посевов;
- оценки ущерба и планирования аварийно-спасательных работ; при ЧС,
таких как наводнения, оползни и пожары.

Рисунок — «Геоскан 201»
В качестве движителей аппаратов самолетного типа обычно используются тянущие или толкающие винты, а также импеллеры (лопаточные машины, заключенные в цилиндрический кожух – англ.: impeller, ducted fan, shrouded propeller) или реактивные двигатели.
Для аппаратов самолетного типа обычно необходима взлетно-посадочная полоса (ВПП) или же стартовые катапульты (рисунок 5). Есть также самолетные БПЛА легкого класса, запускаемые «с руки». При посадке может применяться ВПП, парашют или специальные уловители (тросы, сетки или растяжки)
Рисунок — стартовая катапульта
Взлеты и посадки традиционных БПЛА самолетного типа – процесс достаточно
трудоемкий и затратный, требующий наличия специальных вспомогательных
средств (ВПП, устройств запуска и посадки), поэтому разработчики новой
техники все чаще обращаются к нетрадиционным схемам самолетных БПЛА,
позволяющим создать безаэродромные беспилотные системы. Речь идет прежде
всего о самолетах вертикального взлета и посадки (СВВП). На сегодняшний
день существует много разновидностей аппаратов ВВП. Многие из них
являются гибридами самолетов и вертолетов, и рассмотрены в следующем
разделе. Те же СВВП, которым в большей степени присущи свойства
самолета, чем вертолета, обычно имеют в качестве движителя реактивный
двигатель, импеллер или небольшие по размеру пропеллеры. Их условно
можно разделить по положению фюзеляжа при взлете и посадке на аппараты с
вертикальным положением фюзеляжа (тэйлситтеры, от англ. – tailsitter)
На сегодняшний
день существует много разновидностей аппаратов ВВП. Многие из них
являются гибридами самолетов и вертолетов, и рассмотрены в следующем
разделе. Те же СВВП, которым в большей степени присущи свойства
самолета, чем вертолета, обычно имеют в качестве движителя реактивный
двигатель, импеллер или небольшие по размеру пропеллеры. Их условно
можно разделить по положению фюзеляжа при взлете и посадке на аппараты с
вертикальным положением фюзеляжа (тэйлситтеры, от англ. – tailsitter)
Тэйлситтеры в стартовом положении обычно опираются хвостовой частью на грунт. Если в качестве движителя используются тянущие винты, то они располагаются в носовой части (рис. 2.3.6). Посадка, как и взлет, у таких аппаратов обычно производится вертикально. Самое сложное для СВВП – это переход с вертикальной фазы полета на горизонтальную и обратно. У показанного на рисунке 6 БПЛА SkyTote, например, для управления полетом в этих фазах используется даже специальный нейросетевой контроллер.
Рисунок — БПЛА SkyTote
Существует особый вид БПЛА – аппарат с жестким зонтообразным крылом,
основанных на эффекте Коанда. Хотя эти аппараты мало похожи на самолеты,
по принципу полета они все же больше всего соответствуют этой
классификационной группе.
Хотя эти аппараты мало похожи на самолеты,
по принципу полета они все же больше всего соответствуют этой
классификационной группе.
Эффект Коанда – физическое явление, названное так, потому что в 1932
году румынский ученый Анри Коандэ обнаружил, что поток жидкости или газа
стремится отклониться по направлению к стенке тела с криволинейной
поверхностью и при определенных условиях прилипает к ней, вместо того,
чтобы продолжать движение в начальном направлении. Действие эффекта
Коанды проявляется тогда, когда подача слоя воздуха на поверхность
производится через узкую щель. Этот тонкий скоростной слой захватывает
окружающий воздух. В итоге создается т.н. настилающая струя –
полуограниченная струя, которая всегда развивается только вдоль
поверхности ограждения. Дальность распространения настилающей струи
увеличивается приблизительно в 1,2 раза по сравнению со стесненной
струей (т.е. струей, ограниченной со всех сторон, как в трубе). Таким
образом, струя, которая настилается на поверхность, имеет большую
дальнобойность при остальных одинаковых условиях, чем струя
ненастилающая.
Летательный аппарат на эффекте Коанда (рисунок 7) устроен довольно просто: над зонтообразной поверхностью установлен вентилятор или реактивный двигатель, создающий поток воздуха, выходящий через узкую щель и настилающий криволинейную поверхность.
Рисунок — Летательный аппарат на эффекте Коанда
Такой аппарат имеет преимущество при использовании по сравнению с обычными вертолетами в городских условиях, лесистой и горной местности, где велика вероятность повреждения несущего винта вертолета. У предлагаемого аппарата небольшие столкновения с препятствиями не могут нарушить его работу.
Мультироторные (вертолетные) системы
Одним из наиболее массовых БПЛА является мультикоптер. К этой группе
относятся БПЛА, имеющие больше двух несущих винтов. Реактивные моменты
уравновешиваются за счет вращения несущих винтов попарно в разные
стороны или наклона вектора тяги каждого винта в нужном направлении.
Беспилотные мультикоптеры, как правило, относятся к классам мини- и
микро-БПЛА.
Основное назначение мультикоптеров – это фото- и видеосъемка различных объектов, поэтому они, как правило, оснащаются управляемыми подвесами для камер. Мультикоптеры также используются в качестве устройств для оперативного мониторинга ситуации, проведения сельскохозяйственных работ (например, опрыскивание), для доставки грузов небольшого веса.
Рисунок 8 –“Tricopter” Рисунок 9 – “+Copter Рисунок 10 – “XCopter”
Рисунок — “Y4Copter” Рисунок — “HexaCopter” Рисунок — “H6Copter”
Рисунок 14 — “Y6Copter” Рисунок 15 — “OctoCopter” Рисунок 16 — “ButterflyCopter”
Трикоптер – самая простая схема построения мультикоптеров (рисунок —
17). Обычно трикоптер движется двумя винтами вперед, а третий является
хвостовым. Первые два винта имеют противоположные направления вращения и
взаимно компенсируют реактивные закручивающие моменты, у хвостового же
винта пары нет, поэтому для компенсации его реактивного момента ось
вращения этого винта немного наклоняют в сторону, противоположную
направлению закручивания. Это делают с помощью специального сервопривода
и тяги, которые используются для стабилизации или управления положением
аппарата по курсу.
Это делают с помощью специального сервопривода
и тяги, которые используются для стабилизации или управления положением
аппарата по курсу.
Рисунок — Пример Трикоптера
Квадрокоптер – самая распространенная схема построения мультикоптеров.
Наличие четырех жестко зафиксированных роторов дает возможность
организовать довольно простую схему организации движения. Существуют две
таких схемы движения: схема «+» и схема «х». В первом случае один из
роторов является передним, противоположный ему – задним, и два ротора
являются боковыми. В схеме «х» передними являются одновременно два
ротора, два других являются задними, а смещения в боковом направлении
также реализуются одновременно парой соответствующих роторов (рисунок
18) Алгоритм управления частотами вращения винтов для схемы «+»
несколько проще и понятнее, чем для схемы «х», однако последняя
используется все же чаще из-за конструктивных преимуществ: при такой
схеме проще разместить фюзеляж, который может иметь вытянутую форму,
бортовая видеокамера имеет более свободный обзор.
Рисунок — Геоскан 401
Гексакоптеры и октокоптеры, имеющие соответственно по 6 (рисунок — 19) и 8 (рисунок — 20) моторов обладают гораздо большей грузоподъемностью по сравнению с квадрокоптерами. Они также способны сохранять устойчивый полет при выходе из строя одного двигателя. Такие аппараты отличаются также гораздо меньшим уровнем вибраций, что особенно важно для видеосъемки.
Рисунок – Октокоптер Рисунок – Гексокоптер
БПЛА Аэростатического типа
БПЛА аэростатического типа (blimps) – это особый класс БПЛА, в котором подъемная сила создается преимущественно за счет архимедовой силы, действующей на баллон, заполненный легким газом (как правило, гелием). Этот класс представлен, в основном, беспилотными дирижаблями (рисунок — 21)
Дирижабль (от фр. dirigeable – управляемый) – летательный аппарат легче
воздуха, представляющий собой комбинацию аэростата с движителем (обычно
это винт (пропеллер, импеллер) с электрическим двигателем или ДВС) и
системы управления ориентацией благодаря которой дирижабль может
двигаться в любом направлении независимо от направления воздушных
потоков.
Рисунок — БПЛА аэростатического типа
Отличительное преимущество дирижабля — большая грузоподъемность и дальность беспосадочных полетов. Достижимы более высокая надежность и безопасность, чем у самолетов и вертолетов. (Даже в самых крупных катастрофах дирижабли показали высокую выживаемость людей.) Меньший, чем у вертолетов, удельный расход топлива и, как следствие, меньшая стоимость полета в расчете на единицу массы перевозимого груза. Размеры его внутренних помещений могут быть очень велики, а длительность нахождения в воздухе может измеряться неделями. Дирижаблю не требуется взлетно-посадочной полосы (но зато требуется причальная мачта) — более того, он может вообще не приземляться, а просто «зависнуть» над землей (что, впрочем, осуществимо только при отсутствии сильного бокового ветра).
Рисунок — Дирижабль для аэрофотосъемки
Наиболее типичные применения современных беспилотных дирижаблей – это
реклама и видеонаблюдение (рисунок — 22). Однако в последние годы их все
чаще заказывают телекоммуникационные компании для использования в
качестве ретрансляторов сигналов. Существуют также проекты постройки
дирижаблей очень большой грузоподъемности – 200-500 тонн.
Существуют также проекты постройки
дирижаблей очень большой грузоподъемности – 200-500 тонн.
Привлекают внимание новые концепты дирижаблей, имеющие, как правило, нетрадиционные форму оболочки и способ движения.
Беспилотные дирижабли линзообразной формы планирует выпускать ОАО
«Долгопрудненское конструкторское бюро автоматики» при поддержке
«Рособоронэкспорта» и «Ростехнологий». Они будут иметь от 22 до 200 м в
диаметре и смогут переносить до нескольких сотен тонн груза. Пока
созданы лишь демонстрационные масштабные модели таких дирижаблей. Пример
– успешно испытанная модель ДП-27 «Анюта» (рисунок — 23). Дисковидная
форма этого аппарата обеспечивает устойчивость к боковому ветру,
простоту управления и высокую маневренность этого многоцелевого
беспилотного дирижабля. Диаметр корпуса судна – 17 м с объемом оболочки
– 522 куб. м, грузоподъемность – 200 кг, максимальная высота подъема
достигает 800 м. С помощью 4 двигателей по 25 л.с. аппарат развивает
скорость до 80 км/ч, бензобак объемом 40 л позволяет демонстратору
осуществлять полет на дистанцию 300 км.
Рисунок -ДП-27 «Анюта»
Беспилотные конвертопланы и гибридные схемы
Гибридные винтокрылые аппараты – автожиры и конвертопланы. Кроме рассмотренных классов аппаратов самолетного и мультироторного типа существуют их гибридные разновидности, такие как автожиры и конвертопланы, которые имеют некоторые признаки как вертолетов, так и самолетов.
Автожир (другие названия: гирокоптер, гироплан, ротаплан, англоязычные: autogiro, gyrocopter, gyroplane, rotoplane) – схема, подобная самолету, у которого в качестве крыла (или в дополнение к нему) установлен свободно вращающийся винт (рисунок — 24)
Рисунок — Пример одного их первых автожиров
Как и вертолету, автожиру несущий винт необходим для создания подъемной
силы, однако создание подъемной силы основным винтом автожира основано
на другом принципе. Он создает виртуальную дисковую поверхность, при
набегании на которую встречного потока воздуха и создается подъемная
сила. Здесь существенно, что в полете этот винт наклонен назад, против
потока – подобно фиксированному крылу с положительным углом атаки
(вертолет, наоборот, наклоняет винт в сторону движения, т. к. создает
приводным несущим винтом и подъемную, и горизонтальную пропульсивную
силы одновременно). Кроме несущего ротора, автожир обладает еще и
тянущим или толкающим маршевым винтом (пропеллером), как и у обычного
самолета. Этот маршевый винт и сообщает автожиру горизонтальную
скорость.
к. создает
приводным несущим винтом и подъемную, и горизонтальную пропульсивную
силы одновременно). Кроме несущего ротора, автожир обладает еще и
тянущим или толкающим маршевым винтом (пропеллером), как и у обычного
самолета. Этот маршевый винт и сообщает автожиру горизонтальную
скорость.
Большинство автожиров не могут взлетать вертикально, но им требуется
гораздо более короткий разбег для взлета (10-50 м, с системой
предраскрутки ротора), чем самолетам. Почти все автожиры способны к
посадке без пробега или с пробегом всего несколько метров. По
маневренности они находятся между самолетами и вертолетами, несколько
уступая вертолетам и абсолютно превосходя самолеты. Автожиры превосходят
самолеты и вертолеты по безопасности полета. Самолету опасна потеря
скорости, поскольку он сваливается при этом в штопор. Автожир при потере
скорости начинает снижаться. При отказе мотора автожир не падает, вместо
этого он снижается (планирует), используя эффект авторотации (несущий
винт вертолета при отказе двигателя также переводится в режим
авторотации, но на это теряется несколько секунд и падают обороты
ротора, важные при вынужденной посадке). При посадке автожиру не
требуется посадочная полоса.
При посадке автожиру не
требуется посадочная полоса.
Скорость автожира сравнима со скоростью легкого вертолета и несколько уступает легкому самолету. По расходу топлива они уступают самолетам, техническая себестоимость летного часа автожира в несколько раз меньше, чем у вертолета, благодаря отсутствию сложной трансмиссии. Типичные автожиры летают со скоростью до 180 км/ч), а расход топлива составляет 15 л на 100 км при скорости 120 км/ч. Другими преимуществами автожиров являются гораздо меньшая, чем в вертолетах, вибрация, а также способность летать при значительном (до 20 м/с) ветре.
В настоящее время автожиры производятся и в беспилотном исполнении фирмами разных стран. Назначение их самое разнообразное. Так, российская компания «Рустехресурс» (г. Воронеж) разработала беспилотный автожир «Химик» для сельскохозяйственных работ – опыления посадок химикатами (рисунок — 25)
Рисунок — автожир «Химик»
Конвертоплан (англ.: convertiplane, heliplane) – летательный аппарат с
поворотными винтами, которые на взлете и при посадке работают как
подъемные, а в горизонтальном полете – как тянущие (при этом в полете
подъемная сила обеспечивается крылом самолетного типа). Таким образом,
этот аппарат ведет себя как вертолет при взлете и посадке, но как
самолет в горизонтальном полете. Большие винты конвертоплана помогают
ему при вертикальном взлете, однако в горизонтальном полете они
становятся менее эффективными по сравнению с винтами меньшего диаметра
традиционного самолета.
Таким образом,
этот аппарат ведет себя как вертолет при взлете и посадке, но как
самолет в горизонтальном полете. Большие винты конвертоплана помогают
ему при вертикальном взлете, однако в горизонтальном полете они
становятся менее эффективными по сравнению с винтами меньшего диаметра
традиционного самолета.
Среди конвертопланов можно выделить три принципиально различающихся подкласса: аппараты с поворотными винтами (Tiltrotor), с поворотным крылом (Tiltwing) и со свободным крылом (Freewing).
В конвертопланах с поворотными роторами обычно поворотными являются не сами винты, а гондолы с винтами и двигателями. Крылья (обычно небольшой площади) при этом остаются неподвижными. На рисунке 26 приведен пример беспилотного конвертоплана типа Tiltrotor.
Рисунок — конвертоплан Tiltrotor
В конвертопланах с поворотным крылом поворачивается все крыло вместе с
установленными на нем двигателями и винтами. Достоинством такой схемы
является то, что при вертикальном взлете крылья не закрывают воздушный
поток от винтов (увеличивая тем самым эффективность работы винтов). На
рисунке 27 приведены примеры конвертопланов типа Tiltwing.
На
рисунке 27 приведены примеры конвертопланов типа Tiltwing.
Рисунок — конвертопланов типа Tiltwing
Беспилотные конвертопланы с поворотным крылом, построенные по схеме, показанной на рисунке 28, часто рассматривают как особые подклассы мультикоптеров (точнее – квадрокоптеров) – соответственно QTR UAV (Quad Tilt Rotor UAV) и QTW UAV (Quad Tilt Wing UAV).
Рисунок — Конвертолпан с поворотным крылом
В конвертопланах со свободным крылом (Freewing) в зависимости от фазы полета отклоняются винты, создавая вертикальную или горизонтальную тягу, а крылья свободно вращаются вокруг оси, перпендикулярной фюзеляжу.
Под напором воздуха, создаваемого винтами, крылья принимают вертикальное, горизонтальное или какое-либо промежуточное положение. Аппараты такой конструкции отличаются стабильностью полета. На рисунке 29 показан пример беспилотника типа Freewing.
Рисунок — беспилотник типа Freewing
Вопросы для самопроверки:
- Какие отличия международной классификации от российской?
- Перечислите места, где использование дронов категорически запрещено.

- Если мой дрон весит 251 грамм, его нужно регистрировать?
- За счёт чего летает дирижабль?
- Если у трикоптера и гексакоптера в полете сломался один двигатель, смогут ли они продолжить полёт? Почему?
- В чём особенность конвертоплана?
Список использованных источников
- Сборник научных трудов Харьковского университета Воздушных Сил, 2012, выпуск 4 — “Летательные аппараты: аэродинамика, силовые установки, оборудование и вооружение”
- Беспилотная авиация: терминология, классификация, современное состояние — Владимир Фетисов 2014 год
- *https://russiandrone.ru/news/kvadrokoptery_i_drony_nuzhno_li_razreshenie_v_2020_godu/*
От «Ориона» до «Охотника». Как работают российские беспилотники
Российский беспилотный летательный аппарат «Орион» активно применяется в Сирии, а ударный беспилотник С-70 «Охотник» с плоским реактивным соплом недавно продемонстрировали на Новосибирском авиационном заводе (НАЗ) имени Чкалова. О перспективах беспилотных систем – в авторской колонке журналиста и бывшего милиционера Сергея Лютых специально для «Газеты.Ru».
О перспективах беспилотных систем – в авторской колонке журналиста и бывшего милиционера Сергея Лютых специально для «Газеты.Ru».
Увлеченность США ударными беспилотниками хорошо известна и уже даже отрефлексирована в кино, как в позитивном, так и в негативном плане. Еще в 2014 году на экраны вышел фильм про парней, которые убивают людей на Ближнем Востоке, управляя дронами из Штатов. Они вроде бы находятся вне опасности, но испытывают муки совести, так как не всегда под их ударом гибнут только боевики.
«Александр» против «Наполеона»: как русский бриг разгромил французскую эскадру
29 декабря 1806 года моряки русского флота одержали одну из самых знаковых своих побед. Русский…
29 декабря 10:49
Долгое время эксперты ждали, когда Россия догонит в этом отношении США. Вернее, ждали того, чтобы у нас появились такие же изделия самолетного типа, какие мы уже привыкли наблюдать в голливудском кино.
Интересные полевые образцы я увидел своими глазами в авиационном отряде спецназа «Ястреб» МВД России еще в 2015 году. Они там не стояли без дела, а буквально за месяц до моего визита вернулись с Дальнего Востока, где их применяли для борьбы с браконьерами.
Они там не стояли без дела, а буквально за месяц до моего визита вернулись с Дальнего Востока, где их применяли для борьбы с браконьерами.
Конечно, этих злоумышленников они не уничтожали, а только фиксировали их местонахождение, которое передавалось группе захвата. В данном случае речь шла об ижевских ZALA cамолетного типа. Они были способны развивать скорость более 100 километров в час и работать до трех часов на высоте в несколько километров.
Применялись тогда, шесть лет назад, беспилотники и во время спецопераций на Северном Кавказе. Однажды, по словам командира «Ястреба», с их помощью удалось обнаружить опасную группу боевиков, спрятавшуюся в кукурузном поле.
С началом военной операции Воздушно-космических сил (ВКС) России в Сирии возникла нужда и в ударных беспилотниках.
В 2016 году первый полет совершил российский «Орион», ставший отечественным аналогом американского MQ-1C Grey Eagle. Характеристики экспортного варианта известны, а тот, что применяется российскими ВКС, – засекречен. Не слишком афишируется и опыт его боевого применения.
Не слишком афишируется и опыт его боевого применения.
Лишь на днях источник РИА «Новости» сообщил, что «Орион» уже совершил свыше 40 вылетов для нанесения ударов по террористам. По его словам, этот беспилотник успешно применял управляемые ракеты X-БПЛА и авиабомбы.
Кроме того, «Орион» собирал разведывательные данные, «подсвечивал» инфраструктуру противника для артиллерии и авиации.
Об экспортной модели известно, что она способна сутки находиться в полете, набирать высоту до 7500 метров, нести боезапас весом 200 килограммов, двигаться со скоростью (по разным данным) от 120 до 200 километров в час, работать в радиусе 250 километров, а с применением беспилотника-ретранслятора – 300 километров.
Автор «скифской войны». Как Барклай-де-Толли спас Россию от Наполеона
27 декабря 1761 года родился Михаил Богданович Барклай-де-Толли. Именно он является автором плана…
27 декабря 13:35
Журналистам совсем недавно был продемонстрирован первый летный образец другого новейшего российского ударного беспилотника – презентация С-70 «Охотник» с плоским реактивным соплом прошла на Новосибирском авиационном заводе (НАЗ) имени Чкалова. Замминистра обороны Алексей Криворучко отметил, что его функционал «превосходит немногочисленные иностранные аналоги».
Замминистра обороны Алексей Криворучко отметил, что его функционал «превосходит немногочисленные иностранные аналоги».
Однако и американцы не стоят на месте. Они развивают концепцию, предполагающую использование сразу целого роя дронов. На ум в связи с этим приходят аналогии с армией дроидов из Звездных войн. Но и уязвимость у них пока что схожая: есть пункт управления, который находится относительно недалеко от зоны боевых действий. Если его уничтожить, то дроны рухнут на землю.
Американцы пытаются решить проблему уязвимости с помощью автономных систем, которые будут работать в связке с пилотируемыми самолетами-носителями. Уже проводились экспериментальные запуски беспилотников проекта X-61А Gremlin с транспортника «Геркулес».
Наши разработчики осваивают эту тему. И, вероятно, нашли оригинальное решение. Так, компания «Кронштадт» начала создание системы применения «роя» боевых беспилотных летательных аппаратов разных классов. Такой «рой» будет действовать самостоятельно.
«Управляющий оператор будет выдавать задачи не конкретным аппаратам, а ставить задачу выполнить действие в заданном районе. Группа или «рой» будет самостоятельно распределять роли и определять приоритетность выполнения задачи. Это касается как ударных задач, так и задач воздушной разведки. Проще говоря – самостоятельно обнаруживать, классифицировать и поражать заданные цели»,
– рассказал гендиректор «Кронштадта» Сергей Богатков РИА «Новости».
Есть все основания предполагать, что рой дронов-беспилотников может появиться у России раньше, чем у США.
Биография автора:
Сергей Лютых, журналист, капитан милиции в отставке, работал участковым милиционером, расследовал уголовные дела в дознании, раскрывал преступления, будучи оперативником в МУРе на Петровке, 38.
Мнение автора может не совпадать с позицией редакции «Газеты.Ru».
Страница не найдена | Московский Экономический Журнал
Sorry — that page can’t be found. You can view the most recent articles below or try a search:
Найти:Posted by redaktor
Информационная группа ComNews приглашает принять участие в масштабном отраслевом мероприятии – IV Федеральном ИТ-форуме агропромышленного комплекса России — «Smart Agro: Цифровая трансформация в сельском хозяйстве». Дата проведения: 27 октября 2022 г. Место проведения: Отель «Хилтон Гарден Инн Москва Красносельская», ул. Верхняя Красносельская, д.11а стр. 4, Москва Сайт форума: https://www.comnews-conferences.ru/ru/conference/smartagro2022 Мероприятие предусматривает возможность онлайн-участия. Трансляция для […]
Дата проведения: 27 октября 2022 г. Место проведения: Отель «Хилтон Гарден Инн Москва Красносельская», ул. Верхняя Красносельская, д.11а стр. 4, Москва Сайт форума: https://www.comnews-conferences.ru/ru/conference/smartagro2022 Мероприятие предусматривает возможность онлайн-участия. Трансляция для […]
Posted by redaktor
PDF-файл статьи Научная статья Original article УДК 33 doi: 10.55186/2413046X_2022_7_8_496 К ВОПРОСУ ОБ ОЦЕНКЕ ПОКАЗАТЕЛЕЙ БИЗНЕС-ПРОЦЕССОВ ПРЕДПРИЯТИЙ МАЛОГО И СРЕДНЕГО БИЗНЕСА КАК ОСНОВЫ ИХ ФУНКЦИОНИРОВАНИЯ TO THE QUESTION OF ASSESSMENT OF PERFORMANCE INDICATORS OF BUSINESS PROCESSES OF SMALL AND MEDIUM-SIZED BUSINESSES AS THE BASIS OF THEIR FUNCTIONING Симанов Александр Юрьевич, аспирант, специальность: 38.06.01 Экономика профиль: […]
Posted by redaktor
PDF-файл статьи Научная статья Original article УДК 332. 8 doi: 10.55186/2413046X_2022_7_8_495 ВАРИАНТЫ ПОВЫШЕНИЯ КОНКУРЕНТОСПОСОБНОСТИ ПРЕДПРИЯТИЙ СФЕРЫ ЖИЛИЩНО-КОММУНАЛЬНОГО ХОЗЯЙСТВА OPTIONS FOR IMPROVING THE COMPETITIVENESS OF HOUSING AND COMMUNAL SERVICES ENTERPRISES Учаева Татьяна Владимировна, кандидат экономических наук, Пензенский государственный университет архитектуры и строительства, г. Пенза, E-mail: [email protected] Uchaeva Tatiana Vladimirovna, Candidate of Economic Sciences, Penza State University of […]
8 doi: 10.55186/2413046X_2022_7_8_495 ВАРИАНТЫ ПОВЫШЕНИЯ КОНКУРЕНТОСПОСОБНОСТИ ПРЕДПРИЯТИЙ СФЕРЫ ЖИЛИЩНО-КОММУНАЛЬНОГО ХОЗЯЙСТВА OPTIONS FOR IMPROVING THE COMPETITIVENESS OF HOUSING AND COMMUNAL SERVICES ENTERPRISES Учаева Татьяна Владимировна, кандидат экономических наук, Пензенский государственный университет архитектуры и строительства, г. Пенза, E-mail: [email protected] Uchaeva Tatiana Vladimirovna, Candidate of Economic Sciences, Penza State University of […]
Posted by redaktor
PDF-файл статьи Научная статья Original article УДК 33.304 doi: 10.55186/2413046X_2022_7_8_494 ФОРМИРОВАНИЕ ЦИФРОВЫХ КОМПЕТЕНЦИЙ И ЦИФРОВЫХ РЕШЕНИЙ В ЭКОСИСТЕМНОМ ПОДХОДЕ FORMATION OF DIGITAL COMPETENCES AND DIGITAL SOLUTIONS IN THE ECOSYSTEM APPROACH Пахомова Элина Александровна, аспирант кафедры, «Теории менеджмента и бизнес-технологий», ФГБОУ ВО «РЭУ им. Г.В.Плеханова», e-mail: [email protected] Тихонов Андрей Романович, аспирант кафедры, «Теории менеджмента и бизнес-технологий», […]
Г.В.Плеханова», e-mail: [email protected] Тихонов Андрей Романович, аспирант кафедры, «Теории менеджмента и бизнес-технологий», […]
Posted by redaktor
PDF-файл статьи Научная статья Original article УДК 332 doi: 10.55186/2413046X_2022_7_8_493 ТУРИСТСКО-РЕКРЕАЦИОННЫЕ ВИДЫ ДЕЯТЕЛЬНОСТИ В СОЦИАЛЬНО-ЭКОНОМИЧЕСКИХ СИСТЕМАХ ПОСЕЛЕНИЙ ЮГА ПРИМОРСКОГО КРАЯ TOURIST AND RECREATIONAL ACTIVITIES IN THE SOCIO-ECONOMIC SYSTEMS OF SETTLEMENTS IN THE SOUTH OF PRIMORSKY KRAI Работа выполнена при поддержке гранта РФФИ и Национального научного фонда Болгарии – «Разработка пространственных структурно-функциональных моделей приморских туристской рекреационных […]
Posted by redaktor
PDF-файл статьи Научная статья Original article УДК 33 doi: 10. 55186/2413046X_2022_7_8_492 СОВРЕМЕННЫЕ ПОДХОДЫ К ОЦЕНКЕ ФУНКЦИОНИРОВАНИЯ ПРЕДПРИЯТИЙ МАЛОГО И СРЕДНЕГО БИЗНЕСА MODERN APPROACHES TO ASSESSING THE FUNCTIONING OF SMALL AND MEDIUM-SIZED BUSINESSES Симанов Александр Юрьевич, аспирант, специальность: 38.06.01 Экономика профиль: Экономика и управление народным хозяйством, Московский финансово-юридический университет, г. Москва Simonov Alexander Yurievich, Postgraduate student, specialty: […]
55186/2413046X_2022_7_8_492 СОВРЕМЕННЫЕ ПОДХОДЫ К ОЦЕНКЕ ФУНКЦИОНИРОВАНИЯ ПРЕДПРИЯТИЙ МАЛОГО И СРЕДНЕГО БИЗНЕСА MODERN APPROACHES TO ASSESSING THE FUNCTIONING OF SMALL AND MEDIUM-SIZED BUSINESSES Симанов Александр Юрьевич, аспирант, специальность: 38.06.01 Экономика профиль: Экономика и управление народным хозяйством, Московский финансово-юридический университет, г. Москва Simonov Alexander Yurievich, Postgraduate student, specialty: […]
Posted by redaktor
PDF-файл статьи Научная статья Original article УДК 33 doi: 10.55186/2413046X_2022_7_8_491 ЭКОНОМИКА ЗАМКНУТОГО ЦИКЛА КАК ПЕРСПЕКТИВНАЯ КОНЦЕПЦИЯ В ОБЛАСТИ ПЕРЕРАБОТКИ ОТХОДОВ CYCLIC ECONOMY AS A PROMISING CONCEPT IN THE FIELD OF WASTE PROCESSING Полуэктов Тимофей Юрьевич, аспирант, Институт государственной службы и управления, РАНХиГС, ORCID: 0000-0003-2668-575X, E-mail: kevdurant35@yandex. ru Poluektov Timofey Yurievich, postgraduate student of the Institute of […]
ru Poluektov Timofey Yurievich, postgraduate student of the Institute of […]
БЕСПИЛОТНЫЕ САМОЛЕТЫ: МАКСИМУМ ВОЗМОЖНОСТЕЙ | Наука и жизнь
После того как в журнале были напечатаны статьи о работе «ОКБ Сухого»(см. «Наука и жизнь» № 9, 2001 г. и №№ 1, 2, 4, 2002 г.), в редакцию пришли письма с вопросом: занимается ли фирма гражданской тематикой? Нам ответили: еще как! Гражданские самолеты АООТ «ОКБ Сухого» — это известные проекты Су-80, С-21 и семейство региональных пассажирских самолетов. Сегодня конструкторы КБ создают беспилотный летательный аппарат гражданского назначения с уникальными летно-техническими характеристиками, позволяющими использовать его для решения широкого круга задач в сфере науки, экономики и хозяйственного сектора. О новом направлении — беспилотной авиации рассказывает заместитель главного конструктора доктор технических наук, действительный член Академии военных наук А. Х. Каримов.
ТОЧКА ОТСЧЕТА
Заместитель главного конструктора «ОКБ Сухого» Альтаф Хуснимарзанович Каримов.
Технические характеристики беспилотных авиационных систем с большой высотой и продолжительностью полета.
Американский беспилотный самолет «макси»-класса «Глобал Хоук»: высота полета — 20 км, масса — 11,5 тонны, продолжительность полета — более 24 часов.
Многоцелевой беспилотный летательный аппарат «Протеус» производства США: высота полета — 15 км, масса — 5,6 тонны.
Потребности мирового рынка в беспилотных авиационных системах с большой высотой и продолжительностью полета. Прогноз закупок на 2005-2015 годы в сумме составляет 30 миллиардов долларов.
‹
›
Открыть в полном размере
Беспилотный летательный аппарат с большой высотой и продолжительностью полета — долгожданное детище «ОКБ Сухого». Проектировщики заложили в новую машину такие летно-технические характеристики, которые, по нашему мнению, позволят ей превзойти по многим параметрам лучшие в своем классе американские самолеты и найти широкое применение в гражданском секторе.
«Беспилотники» различаются по массе (от аппаратов весом в полкилограмма, сравнимых с авиамоделью, до 10-15-тонных гигантов), высоте и продолжительности полета. Беспилотные летательные аппараты массой до 5 кг (класс «микро») могут взлетать с любой самой маленькой площадки и даже с руки, поднимаются на высоту 1-2 километра и находятся в воздухе не более часа. Как самолеты-разведчики их используют, например, для обнаружения в лесу или в горах военной техники и террористов. «Беспилотники» класса «микро» массой всего 300-500 граммов, образно говоря, могут заглянуть в окно, поэтому их удобно использовать в городских условиях.
Беспилотные летательные аппараты массой до 5 кг (класс «микро») могут взлетать с любой самой маленькой площадки и даже с руки, поднимаются на высоту 1-2 километра и находятся в воздухе не более часа. Как самолеты-разведчики их используют, например, для обнаружения в лесу или в горах военной техники и террористов. «Беспилотники» класса «микро» массой всего 300-500 граммов, образно говоря, могут заглянуть в окно, поэтому их удобно использовать в городских условиях.
За «микро» идут беспилотные летательные аппараты класса «мини» массой до 150 кг. Они работают на высоте до 3-5 км, продолжительность полета составляет 3-5 часов. Следующий класс — «миди». Это более тяжелые многоцелевые аппараты массой от 200 до 1000 кг. Высота полета достигает 5-6 км, продолжительность — 10-20 часов.
И, наконец, «макси» — аппараты массой от 1000 кг до 8-10 т. Их потолок — 20 км, продолжительность полета — более 24 часов. Вероятно, вскоре появятся машины класса «супермакси». Можно предположить, что их вес превысит 15 тонн. Такие «тяжеловозы» будут нести на борту огромное количество аппаратуры различного назначения и смогут выполнять самый широкий круг задач.
Такие «тяжеловозы» будут нести на борту огромное количество аппаратуры различного назначения и смогут выполнять самый широкий круг задач.
Если вспомнить историю беспилотных летательных аппаратов, то впервые они появились в середине 1930-х годов. Это были дистанционно управляемые воздушные мишени, используемые на учебных стрельбах. После Второй мировой войны, точнее, уже в 1950-х годах, авиаконструкторы создали беспилотные самолеты-разведчики. Еще 20 лет понадобилось на то, чтобы разработать машины ударного назначения. В 1970-х — 1980-х годах этой тематикой занимались конструкторские бюро П. О. Сухого, А. Н. Туполева, В. М. Мясищева, А. С. Яковлева, Н. И. Камова. Из туполевского КБ вышли беспилотные разведчики «Ястреб», «Стриж» и находящийся на вооружении и сегодня — «Рейс», а также ударный «Коршун» (его начинали делать в ОКБ Сухого, но потом передали Туполеву), созданный совместно с НИИ «Кулон». Достаточно успешно занималось беспилотными самолетами КБ Яковлева, где разрабатывались аппараты «мини»-класса. Наиболее удачным из них стал комплекс «Пчела», который до сих пор стоит на вооружении.
Наиболее удачным из них стал комплекс «Пчела», который до сих пор стоит на вооружении.
В 1970-х годах в России были развернуты научно-исследовательские работы по созданию беспилотных самолетов с большой высотой и продолжительностью полета. Ими занималось ОКБ В. М. Мясищева, где разрабатывали машину «макси»-класса «Орел». Тогда дело дошло только до макета, но почти через 10 лет работы возобновили. Предполагалось, что модернизированный аппарат сможет летать на высоте до 20 км и находиться в воздухе 24 часа. Но тут наступил реформенный кризис, и в начале 1990-х годов программу «Орел» из-за отсутствия финансирования закрыли. Примерно в то же время и по тем же причинам были свернуты работы над беспилотным летательным аппаратом «Ромб». Этот уникальный по своей конструкции самолет, созданный совместно с «НИИ ДАР» при участии разработчика радиолокационной системы «Резонанс» Главного конструктора Э. И. Шустова, представлял собой разрезной биплан из четырех крыльев, составленных в виде ромба, в которые монтировались крупногабаритные антенны, обслуживающие радиолокационную станцию. Масса его была порядка 12 тонн, а полезная нагрузка достигала 1,5 тонны.
Масса его была порядка 12 тонн, а полезная нагрузка достигала 1,5 тонны.
После первой волны разработок «беспилотников» в 1970-х — 1980-х годах наступило длительное затишье. Армию оснащали дорогостоящими пилотируемыми самолетами. Под них выделяли большие средства. Этим и определялся выбор тематики разработок. Правда, все эти годы «беспилотниками» активно занималось Казанское опытно-конструкторское бюро «Сокол». Оно создавалось на базе ОКБ спортивной авиации под руководством тогда еще молодого специалиста, ныне генерального конструктора «ОКБ Сухого» М. П. Симонова. ОКБ «Сокол» стало, по существу, специализированным предприятием по производству беспилотных авиационных систем. Основное направление — беспилотные воздушные мишени, на которых отрабатываются боевые действия различных военных комплексов и наземных служб, в том числе и комплексов ПВО.
Сегодня беспилотные летательные аппараты «мини»- и «миди»-класса представлены достаточно широко. Их производство под силу многим странам, поскольку с этой задачей могут справиться небольшие лаборатории или институты. Что же касается аппаратов класса «макси», то для их создания нужны ресурсы целого авиастроительного комплекса.
Что же касается аппаратов класса «макси», то для их создания нужны ресурсы целого авиастроительного комплекса.
ВСЕ АРГУМЕНТЫ — «ЗА»
В чем же преимущества беспилотных летательных аппаратов? Во-первых, они в среднем на порядок дешевле пилотируемых самолетов, которые нужно оснащать системами жизнеобеспечения, защиты, кондиционирования… Нужно, наконец, готовить пилотов, а это стоит больших денег. В итоге получается, что отсутствие экипажа на борту существенно снижает затраты на выполнение того или иного задания.
Во-вторых, легкие (по сравнению с пилотируемыми самолетами) беспилотные летательные аппараты потребляют меньше топлива. Представляется, что для них открывается более реальная перспектива и при возможном переходе на криогенное топливо (см. «Наука и жизнь» № 3, 2001 г. — Прим. ред.).
В-третьих, в отличие от пилотируемых самолетов, машинам без пилота не нужны аэродромы с бетонным покрытием. Достаточно построить грунтовую взлетно-посадочную полосу длиной всего 600 метров. («Беспилотники» взлетают с помощью катапульты, а приземляются «по-самолетному», как истребители на авианосцах.) Это очень серьезный аргумент, поскольку из 140 наших аэродромов 70% нуждаются в реконструкции, а темпы ремонта сегодня — один аэродром в год.
(«Беспилотники» взлетают с помощью катапульты, а приземляются «по-самолетному», как истребители на авианосцах.) Это очень серьезный аргумент, поскольку из 140 наших аэродромов 70% нуждаются в реконструкции, а темпы ремонта сегодня — один аэродром в год.
Основной критерий выбора типа летательных аппаратов — стоимость. Благодаря стремительному развитию вычислительной техники существенно подешевела «начинка» — бортовые компьютеры «беспилотников». На первых аппаратах использовались тяжелые и громоздкие аналоговые вычислительные машины. С внедрением современной цифровой техники их «мозг» стал не только дешевле, но и умнее, компактнее и легче. Это означает, что аппаратуры на борт можно взять больше, а ведь именно от нее зависят функциональные возможности беспилотных самолетов.
Если же говорить о военном аспекте, то беспилотные летательные аппараты находят применение там, где в разведывательной операции или воздушном бою можно обойтись без пилота. На IХ международной конференции по «беспилотникам», прошедшей в 2001 году во Франции, прозвучала мысль о том, что в 2010-2015 годах боевые операции сведутся к войне автоматизи рованных систем, то есть к противоборству роботов.
ВЫБОР СДЕЛАН
Еще пять лет назад специалисты «ОКБ Сухого» проанализировали развитие существующих в мире научно-технических программ по созданию «беспилотников» и обнаружили стойкую тенденцию к увеличению их размеров и массы, а также высоты и продолжительности полета. Аппараты с большим весом могут дольше находиться в воздухе, выше подниматься и дальше «видеть». «Макси» берут на борт более 500 кг полезной нагрузки, которая позволяет решать задачи большого объема и с лучшим качеством.
Анализ показал, что беспилотные самолеты класса «макси» и «супермакси» сегодня востребованы как никогда. Судя по всему, они могут изменить расклад сил на мировом рынке летательных аппаратов. Пока эта ниша освоена только американскими конструкторами, которые начали работать над «беспилотниками» «макси»-класса на 10 лет раньше нас и успели создать несколько очень хороших самолетов. Наиболее популярный из них «Глобал Хоук»: он поднимается на высоту до 20 км, весит 11,5 тонны, имеет продолжительность крейсерского полета более 24 часов. Конструкторы этой машины отказались от поршневых моторов и оснастили ее двумя турбореактивными двигателями. Именно после показа «Глобал Хоука» на авиасалоне в Ле-Бурже в 2001 году на Западе началась борьба за захват нового сектора рынка.
Конструкторы этой машины отказались от поршневых моторов и оснастили ее двумя турбореактивными двигателями. Именно после показа «Глобал Хоука» на авиасалоне в Ле-Бурже в 2001 году на Западе началась борьба за захват нового сектора рынка.
Мы планируем создать аналог «Глобал Хоука», но наш аппарат будет немного меньше. Выбор такой размерности основан на скрупулезном изучении спроса.
Еще во время создания первых беспилотных самолетов «макси»-класса «Орел» и «Ромб» мы разработали концепцию, согласно которой начали строить беспилотные аппараты, обеспечивающие наилучшие условия для размещения в них полезной нагрузки. На «Ромбе», например, мы смогли совместить большие антенные блоки размером 15-20 м с элементами самолета. Получилась «летающая антенна». Сегодня мы создаем, по сути, летающую платформу для аппаратуры наблюдения. Соединив полезную нагрузку с бортовыми системами, можно получить полноценный интегрированный комплекс, максимально оснащенный радиоэлектронным оборудованием. Это будет качественно новый вид авиационной техники — стратосферная платформа для решения задач, которые либо не по силам низко-, средневысотным пилотируемым и беспилотным машинам, либо требуют неоправданно больших затрат при выполнении их спутниковыми группировками.
Это будет качественно новый вид авиационной техники — стратосферная платформа для решения задач, которые либо не по силам низко-, средневысотным пилотируемым и беспилотным машинам, либо требуют неоправданно больших затрат при выполнении их спутниковыми группировками.
Наш беспилотный летательный аппарат С-62 представляет собой машину массой 8,5 тонны, способную подняться на высоту 18-20 км/ч, развить скорость 400-500 км/ч, и находиться в воздухе более 24 часов без дозаправки. Его габариты: длина — 14,4 м, высота -
3 м, размах крыла — 50 м, полезная нагрузка — 800-1200 кг. По аэродинамическим характеристикам компоновка С-62 приближает аппарат к планеру. Самолет выполнен по аэродинамической схеме двухбалочная «утка» и имеет крыло большого удлинения. На центроплане крыла расположено вертикальное оперение. Силовая установка находится над центропланом в спаренной мотогондоле. С-62 оснащен двумя двигателями ТРДД РД-1700, используемыми на самолетах Як-130 и МиГ-АТ (хотя прорабатываются и другие варианты двигателей). Эта машина будет легкой и радиопрозрачной, скорее всего из стеклопластика.
Эта машина будет легкой и радиопрозрачной, скорее всего из стеклопластика.
С-62 войдет в состав беспилотных авиационных комплексов БАК-62, предназначенных для выполнения широкого спектра задач гражданского назначения. Каждый такой комплекс включает от одного до трех «беспилотников», наземные станции контроля и управления, связи и обработки информации, а также мобильный пункт технического обслуживания. Наземные станции управления будут работать в пределах радиовидимости — на расстоянии до 600 км. Их назначение — управлять взлетом и посадкой, а также решать задачи автоматического пилотирования и выполнения программы полета. БАК-62 отличается высокой мобильностью, его можно легко перебазировать на новое место в стандартных грузовых контейнерах любым видом транспорта, быстро развернуть и привести в рабочее состояние.
Наземные пункты управления, а также пункты технического обслуживания — тоже забота проектировщиков. В них должны быть созданы условия для комфортного проживания специалистов и обслуживающего персонала и на холодном севере, и на жарком юге (разброс температур может быть в пределах от -50 до +50оС).
КРУГ ЗАДАЧ «БЕСПИЛОТНИКОВ» ГРАЖДАНСКОГО НАЗНАЧЕНИЯ
Весь мир уже осознал, какую пользу и экономию могут принести беспилотные летательные аппараты не только в военной, но и в гражданской сфере. Их возможности во многом зависят от такого параметра, как высота полета. Создав С-62, мы поднимем потолок с 6 до 20 км, а в перспективе и до 30 км. На такой высоте беспилотный самолет может конкурировать со спутником. Отслеживая все, что происходит на территории площадью около миллиона квадратных километров, он сам становится своего рода «аэродинамическим спутником». С-62 могут взять на себя функции спутниковой группировки и выполнять их в режиме реального времени в рамках целого региона.
Чтобы из космоса вести фото- и киносъемку или наблюдать за каким-нибудь объектом, нужны 24 спутника, но и тогда информация от них будет поступать один раз в час. Дело в том, что спутник находится над объектом наблюдения всего 15-20 минут, а затем уходит из зоны его видимости и возвращается на то же место, совершив оборот вокруг Земли. Объект же за это время уходит из заданной точки, поскольку Земля вращается, и снова оказывается в ней только через 24 часа. В отличие от спутника, беспилотный самолет сопровождает точку наблюдения постоянно. Проработав на высоте около 20 км более 24 часов, он возвращается на базу, а ему на смену в небо уходит другой. Еще одна машина находится в резерве. Это огромная экономия. Посудите сами: один спутник стоит порядка 100 миллионов долларов, 24 спутника — это уже 2,4 миллиарда, а стоимость трех беспилотных летательных аппаратов С-62 с наземной инфраструктурой составит немногим более 30 миллионов долларов.
Объект же за это время уходит из заданной точки, поскольку Земля вращается, и снова оказывается в ней только через 24 часа. В отличие от спутника, беспилотный самолет сопровождает точку наблюдения постоянно. Проработав на высоте около 20 км более 24 часов, он возвращается на базу, а ему на смену в небо уходит другой. Еще одна машина находится в резерве. Это огромная экономия. Посудите сами: один спутник стоит порядка 100 миллионов долларов, 24 спутника — это уже 2,4 миллиарда, а стоимость трех беспилотных летательных аппаратов С-62 с наземной инфраструктурой составит немногим более 30 миллионов долларов.
Беспилотные самолеты могут конкурировать со спутниками и в сфере создания телекоммуникационных сетей и навигационных систем. Например, чтобы Россия имела собственную навигационную систему типа GPS, нужно задействовать около 150 таких машин. Дорогостоящие спутники пригодятся для других целей. Это очень важно, поскольку 70% из них находятся на грани исчерпания своего ресурса.
На «беспилотники» можно возложить непрерывное круглосуточное наблюдение за поверхностью Земли в широком диапазоне частот. Используя С-62, мы сумеем создать информационное поле страны, охватывающее контроль и управление движением воздушного и водного транспорта, поскольку эти машины в состоянии взять на себя функции наземных, воздушных и спутниковых локаторов (совместная информация от них дает полную картину того, что делается в небе, на воде и на земле).
Используя С-62, мы сумеем создать информационное поле страны, охватывающее контроль и управление движением воздушного и водного транспорта, поскольку эти машины в состоянии взять на себя функции наземных, воздушных и спутниковых локаторов (совместная информация от них дает полную картину того, что делается в небе, на воде и на земле).
Беспилотные летательные аппараты помогут решить целый спектр научных и прикладных задач, связанных с геологией, экологией, метеорологией, зоологией, сельским хозяйством, с изучением климата, поиском полезных ископаемых… С-62 будут следить за миграцией птиц, млекопитающих, косяков рыбы, изменением метеоусловий и ледовой обстановки на реках, за движением судов, перемещением транспорта и людей, вести аэро-, фото- и киносъемку, радиолокационную и радиационную разведку, многоспектральный мониторинг поверхности, проникая вглубь до 100 метров.
НА ПУТИ К РЫНКУ
Всемирное признание пришло к «ОКБ Сухого» с выпуском истребителя Су-27. Эта машина действительно заслуживает самой высокой оценки, потому что в ней реализованы выдающиеся научные и инженерно-технические идеи. Колоссальный успех и востребованность Су-27 на мировом рынке в большой степени связаны с тем, что его создание превратилось в общегосударственную научно-техническую программу. Начатая три года назад новая тема — создание высотного беспилотного самолета — тоже нуждается в серьезной государственной поддержке. Чтобы, как говорят, не опоздать и выйти на мировой рынок в то время, когда новая машина будет востребована, сроки выполнения программы должны быть очень жесткими. Нам представляется, что работа может быть завершена в 2005 году при условии необходимого финансирования.
Эта машина действительно заслуживает самой высокой оценки, потому что в ней реализованы выдающиеся научные и инженерно-технические идеи. Колоссальный успех и востребованность Су-27 на мировом рынке в большой степени связаны с тем, что его создание превратилось в общегосударственную научно-техническую программу. Начатая три года назад новая тема — создание высотного беспилотного самолета — тоже нуждается в серьезной государственной поддержке. Чтобы, как говорят, не опоздать и выйти на мировой рынок в то время, когда новая машина будет востребована, сроки выполнения программы должны быть очень жесткими. Нам представляется, что работа может быть завершена в 2005 году при условии необходимого финансирования.
Опыт зарубежных конкурентов подсказывает: чтобы дело пошло быстрее, надо показать заказчикам и инвесторам действующий образец. Выход один — сделать демонстратор или летающий макет, который подтвердит реальность намеченных планов и ускорит их реализацию. Такой аппарат может быть построен всего за два года. Здесь нет неразрешимых проблем, есть только ряд конкретных задач, которые надо выполнить. Все предварительные проработки сделаны.
Здесь нет неразрешимых проблем, есть только ряд конкретных задач, которые надо выполнить. Все предварительные проработки сделаны.
По оценкам российских и зарубежных специалистов, рынок коммерческих услуг, оказываемых беспилотными летательными аппаратами, в ближайшем будущем существенно расширится. Потребность в таких машинах в 2005-2015 годах может составить в денежном выражении не менее 30 миллиардов долларов. И если Россия, как и намечено, к 2005 году создаст конкуренто-способный гражданский беспилотный летательный аппарат С-62 с большой высотой и продолжительностью полета, ей достанется приблизительно четвертая часть этого рынка. Тогда мы сможем выручить от продажи наших машин около миллиарда долларов. Неудивительно, что сегодня многие страны очень активно продвигают свои технические разработки, в том числе и «беспилотники». Нам тоже следует поторопиться.
Сферы применения гражданского беспилотного самолета С-62
ОБНАРУЖЕНИЕ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ:
- воздушных
- надводных
- наземных
УПРАВЛЕНИЕ ВОЗДУШНЫМ ДВИЖЕНИЕМ:
- в труднодоступных районах
- при стихийных бедствиях и авариях
- на временных воздушных трассах в авиации народного хозяйства
КОНТРОЛЬ МОРСКОГО СУДОХОДСТВА:
- поиск и обнаружение судов
- предупреждение аварийных ситуаций в портах
- контроль морских границ
- контроль правил рыболовства
РАЗВИТИЕ РЕГИОНАЛЬНЫХ И МЕЖРЕГИОНАЛЬНЫХ
ТЕЛЕКОММУНИКАЦИОННЫХ СЕТЕЙ:
- системы связи, в том числе мобильные
- телерадиовещание
- ретрансляция
- навигационные системы
АЭРОФОТОСЪЕМКА И КОНТРОЛЬ ЗЕМНОЙ ПОВЕРХНОСТИ:
- аэрофотосъемка (картография)
- инспекция соблюдения договорных обязательств
- (режим «открытого неба»
- контроль гидро-, метеообстановки
- контроль активно излучающих объектов контроль ЛЭП
КОНТРОЛЬ ЭКОЛОГИЧЕСКОЙ ОБСТАНОВКИ:
- радиационный контроль
- газохимический контроль
- контроль состояния газо- и нефтепроводов
- опрос сейсмических датчиков
ОБЕСПЕЧЕНИЕ СЕЛЬХОЗРАБОТ И ГЕОЛОГОРАЗВЕДКИ:
- определение характеристик почвы
- разведка полезных ископаемых
- подповерхностное (до 100 м) зондирование Земли
ОКЕАНОЛОГИЯ:
- разведка ледовой обстановки
- слежение за волнением моря
- поиск косяков рыбы
Виды беспилотных аппаратов для аэрофотосъемки
Янв 02, 2020 | Время чтения 7 мин.
Выбирая беспилотник для картографии, геодезии или нужд землепользования, необходимо учитывать его параметры и конструктивные особенности. Сегодня на рынке представлено очень большое количество различных моделей БПЛА, как отечественных, так и зарубежных производителей.
Классификация БПЛА
В данной материале рассмотрим:
- беспилотники самолетного типа;
- модели со свободным стартом, а также приземлением;
- мультикоптеры и вертолеты.
Главными характеристиками для всех без исключения БПЛА являются их масса, размеры, а также форма. Данные характеристики определяют способы старта аппаратов, их грузоподъемности, а также поведение беспилотника в небе.
Вес беспилотников
От критической взлетной массы БПЛА зависит, какой тип аппаратуры можно будет использовать для производства фотосъемки земной поверхности или лазерного сканирования. Если взлетная масса большая, целесообразно применять более точное оборудование (с большим разрешением матрицы) для производства съемки или оборудовать лазерным сканером. Также стоит отметить, что тяжелый БПЛА более стабилен в воздухе, от чего соблюдается правильная геометрия снимков. Стоит учитывать, что обычно аппарат выбирается исходя из бюджета и наличия специалистов, которые могут управлять тем или иным воздушным судном.
Также стоит отметить, что тяжелый БПЛА более стабилен в воздухе, от чего соблюдается правильная геометрия снимков. Стоит учитывать, что обычно аппарат выбирается исходя из бюджета и наличия специалистов, которые могут управлять тем или иным воздушным судном.
Формы и размеры беспилотников
Самолетный тип беспилотников представлен двумя видами: фюзеляжный и летающее крыло. От размеров крыла напрямую зависят аэродинамические показатели.
- Благодаря тому, что фюзеляжные аппараты зачастую имеют больший вес, они могут нести дополнительную полезную нагрузку и, как правило, более стабильны в воздухе (соответственно улучшаются условия для производства аэрофотосъемки и не дают «смазов» на снимаках даже при низком ISO). В тоже время, конструкция таких беспилотных аппаратов сложна, что сказывается на стоимости ремонта и ужесточении инструкций по обслуживанию и эксплуатации. Фюзеляжные БПЛА запускаются с катапульты.
- БПЛА типа летающее крыло отличаются простой конструкцией.
 К недостаткам можно отнести малую полезную нагрузку и размеры. Это не позволяет аппарату поднимать тот вес, который доступен для БПЛА фюзеляжного типа. Однако, их можно запустить в небо без системы катапультирования, а цена «болванки» позволит всегда иметь в запасе еще один самолет.
К недостаткам можно отнести малую полезную нагрузку и размеры. Это не позволяет аппарату поднимать тот вес, который доступен для БПЛА фюзеляжного типа. Однако, их можно запустить в небо без системы катапультирования, а цена «болванки» позволит всегда иметь в запасе еще один самолет.
Многовинтовые БПЛА (мультикоптеры)
Мультироторы (мультикоптеры), в свою очередь, различаются по многим характеристикам. Среди них немаловажный показатель – это число винтов. Существует мнение, что аппараты с 8-ю винтами более стабильны в воздухе, чем 4- и 6-винтовые. Алгоритмы полетов позволили добиться того, что практически все коптеры ведут себя стабильно даже в случае нарушения работы одного из винтов. Опыт показывает, что базовый DJI Phantom применим в сфере геодезии при использовании опознаков.
Моторы в БПЛА
Львиная доля беспилотников оснащены электрическими двигателями. От параметров двигателя главным образом зависит максимальное время и расстояние полёта. Небольшие беспилотные аппараты могут находиться в полёте до 20-40 минут. Более крупные модели летают меньше, но могут поднять больше полезной нагрузки.
Небольшие беспилотные аппараты могут находиться в полёте до 20-40 минут. Более крупные модели летают меньше, но могут поднять больше полезной нагрузки.
Также существуют модели беспилотников с бензиновыми двигателями. Такие аппараты тяжелее, но мощнее электрических. Время полёта может составлять десять часов. Причем беспилотник может преодолеть расстояние до 1 тыс. км. В качестве топлива используют бензиновую смесь (марки 92 и 95) с добавлением синтетического масла для двухтактных моторов. Бензиновые БПЛА расходуют около 500 мл бензина в час (режим горизонтального полёта). В среднем объем бака такого аппарата равен пяти литрам. Такие БПЛА целесообразно использовать для производства аэрофотосъемки больших по площади территорий.
Высота съемки и качество снимков
От высоты полета беспилотника зависит размер пикселя изображений, а также количество снимков. В странах ЕС существуют жесткие ограничения по поводу полетов в воздушном пространстве на высотах до 0,1 – 0,15 км. В тоже время отечественное законодательство не предусматривает ограничений на число полетных заданий. Имея снимок с разрешением 3-4 см/пиксель, можно путем дешифрирования получить топоплан М 1:2000, а в некоторых случаях, если местность открытая и не слишком контурная, и 1:500.
В тоже время отечественное законодательство не предусматривает ограничений на число полетных заданий. Имея снимок с разрешением 3-4 см/пиксель, можно путем дешифрирования получить топоплан М 1:2000, а в некоторых случаях, если местность открытая и не слишком контурная, и 1:500.
Скорость беспилотных аппаратов
От скорости БПЛА зависит возможность их применения в ветреные дни и производительность работ по съемке земной поверхности.
- Компактные беспилотные самолеты (летающее крыло) имеют крейсерскую скорость 50 – 70 км/ч.
- Более крупные модели БПЛА – 100 км/ч.
- При скорости ветра 10 м/c и более использование беспилотников ограничено. Ветер в влияет на качество полученных изображений и перекрытия снимков, увеличивая смазы. Также стоит отметить, что спрогнозировать порывы ветра на высоте довольно сложно.
Способы взлета и посадки БПЛА самолета
Одним из немаловажных параметров БПЛА является способ их взлета и приземления.
- Главными способами старта являются взлет с помощью специальной катапульты, а также запуск аппарата с рук.
- Для посадки применяется парашютный способ, либо посадку на корпус
- Конвертопланы имеют вертикальный взлет и посадку.
Современные летательные аппараты работают в автоматическом режиме. Осуществление ручного управления используется опытными пилотами при взлете и посадке в сложных условиях.
В БПЛА есть автопилот – мозговой цент беспилотного летательного аппарата. Ранее использовались простые автопилоты, которые главным образом применялись для любительских целей, не удовлетворяя задачам аэрофотосъемки – количество точек было крайне мало. Сегодня проблемы в ограничении количества контрольных точек нет – самолеты полностью удовлетворяют требованиям фотограмметрии при выстраивании сложных маршрутных заданий.
Фотокамеры беспилотников
Большинство самолетов или коптеров – небольшие аппараты с низкой грузоподъемностью. Исходя из этого фактора, в роли приборов для аэрофотосъемки, чаще всего, применяют небольшие фотокамеры, но с большими возможностями.
Исходя из этого фактора, в роли приборов для аэрофотосъемки, чаще всего, применяют небольшие фотокамеры, но с большими возможностями.
- Современные компактные камеры могут иметь разрешение матрицы от 24 мпикс, а также физический размер матрицы в 35 мм, что удовлетворяет потребностям аэрофотосъемки.
- На крупные БПЛА монтируется более серьезное оборудование (АФС-камеры с центральным затвором).
- То, как работают затворы, камеры тоже очень важно. Центральный или электронный затвор на камерах позволяет успешно применять их для целей аэрофотосъемки.
Существуют также фотокамеры, которые созданы специально для использования на беспилотниках. Такое профессиональное оборудование стоит не дешево (30–50 тыс.евро). Несомненно, такая камера обеспечивает снимки очень высокого качества. От производительности фотокамеры и её матрицы также зависит число снимков и затраты времени на обработку полученных результатов аэрофотосъемки.
Оборудование для спутниковой навигации
Основными приборами для навигации в беспилотниках, чаще всего, выступают недорогие одночастотные приборы GPS/IMU. Это же оборудование применяется для внешней ориентации фотоснимков. В настоящее время, все больше производителей традиционных геодезических приборов, таких как Javad, Trimble, Novotel, добавляют в линейку GPS/ГЛОНАСС плат компактные и максимально облегченные вариации для воздушного применения. Произведенные измерения с борта уравниваются с данными основных GNSS базовых станций. На большинстве беспилотников устанавливают инерциальные системы INS, которые делают возможным ориентирование аэрофотосъемки с нужной точностью.
Это же оборудование применяется для внешней ориентации фотоснимков. В настоящее время, все больше производителей традиционных геодезических приборов, таких как Javad, Trimble, Novotel, добавляют в линейку GPS/ГЛОНАСС плат компактные и максимально облегченные вариации для воздушного применения. Произведенные измерения с борта уравниваются с данными основных GNSS базовых станций. На большинстве беспилотников устанавливают инерциальные системы INS, которые делают возможным ориентирование аэрофотосъемки с нужной точностью.
Обмен данными
Связь с беспилотниками осуществляется через радиоволны. Частоты находятся в диапазоне от 0,443 до 2,4 ГГц. Связь с БПЛА нужна для контроля точности выполнения плана работ, и возможной корректировки аппарата во время полёта. Также возможна передача полученных изображений и картинки с навигационной камеры через радиоканалы на дальних расстояниях.
Условия для работы
Большинство беспилотников могут работать в широком температурном диапазоне (от -30 до +50 градусов по Цельсию), что позволяет использовать аппараты в различных широтах земного шара. Кроме температуры важна скорость ветра. Большинство беспилотных летательных аппаратов могут нормально работать, при скорости ветра от 0 до 15 м/с.
Кроме температуры важна скорость ветра. Большинство беспилотных летательных аппаратов могут нормально работать, при скорости ветра от 0 до 15 м/с.
Дополнительный «обвес»
К оборудованию, которое может устанавливаться на беспилотник, относятся не только фотокамеры. Также могут устанавливаться такие приборы, как лазерный сканер (LIDAR), видеокамера, тепловизор, инфракрасная камера. Такое оборудование позволяет успешно решать многие задачи, при исследовании и технической диагностики различных наземных объектов, сельском хозяйстве, мониторинге за трубопроводами.
Сертификация беспилотников в РФ
Учетом воздушных судов в России занимается Росавиация. Регистрация занимает несколько дней. Необходимо подать комплект документов тремя способам: через портал Госуслуг, через портал учета БВС, бумажным отправлением в Федеральное агенство Воздушного транспорта. После рассмотрения заявления судну будет присвоен индивидуальный номер.
Для решения задач землеустройства, геодезии и картографии необходимы беспилотные аппараты с параметрами, которые позволяют устанавливать на них специализированные приборы GPS/INS, а также камеры (имеющие крупную матрицу и центральный затвор). Важно что бы алгоритмы автопилота соответствовали съемке с четко установленными параметрами задания.
Важно что бы алгоритмы автопилота соответствовали съемке с четко установленными параметрами задания.
При мониторинге земель сельскохозяйственного назначения, а также водных и лесных массивов, можно использовать БПЛА меньших размеров, а также устанавливать непрофессиональные камеры. В этом случае возникает вопрос производительности, так как такие территории, как правило, довольно велики по площади. В данном случае важно, что бы БПЛА были максимально устойчивы к различным погодным условиям и подходили в балансе время полета/скорость/дальность.
Маркшейдеры на горных предприятиях все чаще задействуют в каждодневной работе воздушнею съемку. БПЛА идеально подходят для этих условий, так как не встречается практически никаких помех в виде дереьвев или зданий, которые ограничивают применение летающих аппаратов. Еще одним преимуществом является и то, что воздушное пространство над карьерами обычно регулируется в том числе и самим пользователем недр, поэтому проблем с согласванием полетов возникнуть не должно.
Статью проверил эксперт
Написать эксперту
Ковель Игорь Иванович
Инженер-геодезист. Образование Московский Государственный Университет (МГУ)
рейтинг: 0/5 — голосов:
БПЛА палубного базирования ВМС зарубежных стран — ВМС — Материал посвящён … — Статьи
Майор Б. Денисов;
В. Георгиев,
доктор технических наук
Беспилотные летательные аппараты (БПЛА), ставшие неотъемлемой частью средств вооруженной борьбы, предназначены для решения широкого круга задач. С начала 2000-х годов они находятся на вооружении кораблей различного водоизмещения ВМС США и других стран. Разрабатываются БПЛА берегового и палубного базирования, а также беспилотные летательные аппараты для применения с подводных лодок.
В статье рассмотрены конструктивные особенности и приведены тактико-технические характеристики основных образцов аппаратов, запускаемых с палубы кораблей.
Оснащение кораблей авиационными средствами, обеспечивающими ведение воздушной разведки и корректировку огня артиллерии, ведется с начала ХХ века. Первые опыты применения с кораблей беспилотных самолетов датируются 1942 годом, а беспилотных вертолетов — 1959-м.
В США первыми беспилотными самолетами, которые могли взлетать с палубы авианосца, стали TDN-1 компании «Нэйвел эркрафт фэктори» и TDR-1 фирмы «Интерстейт». Они предназначались для борьбы с японскими кораблями на Тихом океане.
Управление полетом беспилотного самолета TDR-1, оснащенного осколочно-фугасной авиационной бомбой калибра 910 кг или одной торпедой Mк 13 массой 1 005 кг, осуществлялось оператором с борта пилотируемого самолета по радиоканалу. Наведение на цель производилось с помощью компактной телевизионной камеры типа «Блок-1».
Изображение от нее транслировалось на телевизионный приемник самолета управления, работающего на одной из четырех фиксированных частот: 78, 90, 102 и 114 МГц. Это обеспечивало одновременное применение четырех аппаратов по одной цели.
Это обеспечивало одновременное применение четырех аппаратов по одной цели.
Для взлета TDR-1 с аэродрома или с палубы авианосца использовался командный пост. По радиокомандам машина поднималась в воздух и переводилась в горизонтальный полет. Далее управление осуществлял экипаж самолета сопровождения. Предполагалось, что после атаки цели беспилотный аппарат будет приводняться и использоваться многократно. Однако, как правило, он оказывался одноразового применения.
Для перегона между аэродромами беспилотные самолеты имели небольшую закрытую кабину для летчика и простейшее навигационное оборудование.
При выполнении боевого задания фонарь кабины и кресло летчика демонтировались, а отверстие в корпусе закрывалось обшивкой.
Трехстоечное неубирающееся шасси применялось только при перелетах между базами, а при боевом вылете сбрасывалось после взлета.
TDR-1 использовались в ходе боевых действий в период с июля по октябрь 1944 года. Из 46 запущенных аппаратов 29 поразили намеченные цели. Всего было построено до 300 радиоуправляемых машин TDN-1 и TDR-1.
Из 46 запущенных аппаратов 29 поразили намеченные цели. Всего было построено до 300 радиоуправляемых машин TDN-1 и TDR-1.
Первым беспилотным вертолетом, поступившим на вооружение ВМС США в 1963 году, стал QH-50 DASH (Drone Anti-Submarine Helicopter) компании «Гиродайн». Разработанный на основе малоразмерного вертолета XRON-I «Роторсайкл», он предназначался для решения задач противолодочной обороны.
Аппаратом QH-50 оснащались эсминцы, построенные в период Второй мировой войны, с целью повышения их возможностей по борьбе с подводными лодками вероятного противника.
Аппараты QH-50 максимальной взлетной массой 1046 кг оснащались двумя торпедами Mк 44 или Mк 46 и использовались совместно с другими противолодочными средствами корабля. После обнаружения подводной лодки беспилотный вертолет, управляемый дистанционно, направлялся в точку пуска торпед, осуществлял их сброс и возвращался обратно на корабль. Такая тактика позволяла значительно расширить рубежи перехвата подводных лодок противника.
При возникновении нештатной ситуации беспилотный аппарат мог приводниться. За время эксплуатации в море было потеряно примерно 360 машин, 85% из них — из-за отказа системы управления.
Беспилотные вертолеты QH-50 различных модификаций состояли на вооружении ВМС США до 1973 года. Всего за время серийного производства выпущено около 750 единиц. Последние модели QH-50 эксплуатировались на испытательном полигоне сухопутных войск США Уайт-Сэндз до 2006 года.
Современные зарубежные БПЛА по массо-габаритным характеристикам подразделяются на три класса.
Беспилотные летательные аппараты первого класса (максимальная взлетная масса до 150 кг) могут совершать полеты на расстояние до 50-100 км в интересах разведывательного обеспечения отдельных судов или отрядов боевых кораблей. Как правило, такие аппараты выполнены по самолетной схеме.
БПЛА, относящиеся ко второму классу максимальной взлетной массой от 150 до 600 кг, должны обеспечивать действия отрядов боевых кораблей и корабельных соединений, совершая полеты на удаление до 200 км. Большинство из них — беспилотные аппараты вертолетной схемы.
Большинство из них — беспилотные аппараты вертолетной схемы.
Аппараты третьего класса имеют максимальную взлетную массу более 600 кг. Они задействуются при решении задач по ведению разведки в интересах объединений и флотов ВМС. На вооружении состоят беспилотные вертолеты и самолеты, причем как палубного, так и аэродромного базирования (например, американский стратегический разведывательный БПЛА большой продолжительности полета MQ-4С «Тритон»).
Наиболее известными аппаратами первого класса являются американские БПЛА ScanEagle и RQ-21A «Блэк Джек».
Аппарат ScanEagle разработан специалистами американской компании «Инситу» (вошла в состав концерна «Боинг») в начале 2000-х годов на базе коммерческого БПЛА «Си Скэн»1, созданного для рыболовецких судов и обеспечивающего длительное наблюдение за косяками рыб.
Он обладает летно-техническими характеристиками, оптимизированными для выполнения задач длительного патрулирования заданных районов. Состоит на вооружении ВМС США и ряда других зарубежных стран.
Состоит на вооружении ВМС США и ряда других зарубежных стран.
ScanEagle выполнен по схеме «бесхвостка». Он оснащен стреловидным крылом с загнутыми вверх законцовками. Силовая установка — поршневой двигатель 3W-28 мощностью 1,9 кВт с двухлопастным толкающим винтом. В носовой части фюзеляжа размещена гиростабилизированная платформа с установленной на ней телевизионной или инфракрасной камерой.
Аппарат стартует с пневматической катапульты2. Его посадка осуществляется с помощью системы «Скай Хук». Она представляет собой штангу с тросом длиной около 15 м. Захват троса обеспечивается крюками, расположенными на законцовках крыла. Допустимая максимальная скорость ветра при посадке 55,5 км/ч.
Дополняет линейку аппаратов «Си Скэн» и ScanEagle тактический БПЛА большой продолжительности полета RQ-21A «Блэк Джек», разработанный по программе STUAS (Small Tactical Unmanned Aircraft System). Он поступил на вооружение ВМС, включая морскую пехоту (МП) США, в 2016 году. Аппарат предназначен для ведения видовой воздушной разведки, выдачи целеуказания и ретрансляции сигналов связи при обеспечении боевых действий подразделениями и частями МП, а также надводными кораблями различных классов на удалении до 100 км.
Аппарат предназначен для ведения видовой воздушной разведки, выдачи целеуказания и ретрансляции сигналов связи при обеспечении боевых действий подразделениями и частями МП, а также надводными кораблями различных классов на удалении до 100 км.
БПЛА RQ-21А имеет следующее основное разведывательное оборудование: оптико-электронную систему «Мульти-8000» (две камеры среднего и дальнего ИК-диапазонов длин волн, цифровая телевизионная камера и лазерный дальномер-целеуказатель), установленную в носовой части фюзеляжа на гиростабилизированной платформе. В качестве дополнительной полезной нагрузки, размещаемой в фюзеляжном отсеке или на подкрыльевых узлах подвески, могут быть радиолокационная станция с синтезированием апертуры антенны «НаноСАР» (NanoSAR) и аппаратура ретрансляции сигналов связи.
Компактная РЛС «Нано-САР» массой около 900 г работает в диапазоне частот 8-12 ГГц и потребляет мощность от 10 до 25 Вт. В ней реализованы режимы маршрутной съемки и селекции движущихся целей. Дальность действия станции составляет 3 300 км, линейное разрешение на местности 35 см.
Дальность действия станции составляет 3 300 км, линейное разрешение на местности 35 см.
В состав комплекса с БПЛА RQ-21A «Блэк Джек» военно-морских сил США входят: три аппарата (пять — для подразделений МП), одна станция управления (две — для подразделений МП), взлетно-посадочное оборудование, комплект запасных частей и принадлежностей.
Аппарат может запускаться с площадок ограниченных размеров, с палубы кораблей при допустимой скорости ветра 55 км/ч. Запуск RQ-21A «Блэк Джек», оснащенного поршневым двигателем (мощность 6 кВт) осуществляется с пневматической катапульты. Для выполнения посадки используется устройство «Скай Хук».
Руководством американских ВМС предусмотрена закупка 56 комплексов (из них 32 — для подразделений морской пехоты), которые заменят состоящие на вооружении ScanEagle.
В классе аппаратов массой до 600 кг наибольшую известность получил беспилотный вертолет S-100 «Камкоптер» австрийской компании «Шибель электронише геретэ». Он производится серийно с 2005 года. Наиболее крупный потребитель — сухопутные войска Объединенных Арабских Эмиратов (80 единиц). S-100 поставлялись в Австралию, Иорданию, Италию, Китай, Малайзию, Францию, Республику Корея и другие страны. Они используются наблюдательной миссией ОБСЕ на Украине.
Он производится серийно с 2005 года. Наиболее крупный потребитель — сухопутные войска Объединенных Арабских Эмиратов (80 единиц). S-100 поставлялись в Австралию, Иорданию, Италию, Китай, Малайзию, Францию, Республику Корея и другие страны. Они используются наблюдательной миссией ОБСЕ на Украине.
Наряду с решением задач воздушной разведки беспилотные вертолеты могут быть задействованы для обеспечения пусков ракет, стрельбы артиллерии и применения авиационных средств поражения в интересах корабельных групп, использоваться при проведении поисково-спасательных работ на море, а также для доставки грузов в заданный район.
Корпус БПЛА S-100 модульной конструкции изготовлен из композиционных материалов на основе углеволокна. Пилотажно-навигационное оборудование, аппаратура передачи данных и электроснабжения размещены в герметичном отсеке. Вал и втулка несущего винта выполнены из титана, рамы двигателя и носовой части корпуса — из титановых трубок.
Роторно-поршневой двигатель объемом 300 см3 имеет двойную систему зажигания и впрыска топлива, два бензонасоса и электронную систему управления. Мощность двигателя 41 кВт. Полезная нагрузка — оптико-электронная система (РОР-200, РОР-300 и МХ-10), либо радиолокационная станция с синтезированием апертуры антенны «Пико-САР» (PicoSAR) или иные средства.
Мощность двигателя 41 кВт. Полезная нагрузка — оптико-электронная система (РОР-200, РОР-300 и МХ-10), либо радиолокационная станция с синтезированием апертуры антенны «Пико-САР» (PicoSAR) или иные средства.
Полет БПЛА S-100 может выполняться в автоматическом или дистанционно управляемом режиме. В случае потери связи независимо от режима управления аппарат автоматически возвращается к месту старта. Допустимая скорость ветра при взлете и посадке 46 км/ч. Боковые узлы подвески рассчитаны на внешнюю нагрузку массой до 10 кг каждый. На них могут крепиться две управляемые ракеты LMM (Light Multirole Missile). При установке дополнительных топливных баков продолжительность полета аппарата может доходить до 10 ч.
Одним из конкурентов S-100 «Камкоптер» может выступать беспилотный вертолет AWHERO. В настоящее время он разрабатывается специалистами корпорации «Леонардо». Благодаря небольшим размерам аппарат может быть включен в состав вооружения кораблей с малым водоизмещением. Основное его предназначение — ведение видовой воздушной разведки. Первый полет предсерийного образца БПЛА AWHERO состоялся в декабре 2018 года.
Основное его предназначение — ведение видовой воздушной разведки. Первый полет предсерийного образца БПЛА AWHERO состоялся в декабре 2018 года.
Для аппарата планируется разработать несколько вариантов полезной нагрузки. В состав основных будет включена оптико-электронная система наблюдения и радиолокационная станция компании «Габбиано». Дополнительные комплекты — аппаратура ретрансляции, радио- и радиотехнической разведки, автоматы отстрела (например, радиогидроакустических буев) и другое оборудование.
Средства связи и обмена данными, установленные на аппарате, обеспечат получение команд управления и передачу информации от бортовых систем на корабль на удалении от него до 180 км. Они также позволят экипажам вертолетов NH-90, AW-159, AW-101 управлять БПЛА AWHERO и получать видеоизображения от системы наблюдения.
В настоящее время аппарат AWHERO предлагается разработчиком в рамках европейской стратегической инициативы «Океан-2020» (OCEAN — Open Cooperation for European mAritime awareNess). Она предусматривает: координацию научно-исследовательских и опытно-конструкторских работ, повышение кооперации между национальными ВС и военно-промышленными комплексами стран Евросоюза. Сроки принятия данного БПЛА на вооружение не определены.
Она предусматривает: координацию научно-исследовательских и опытно-конструкторских работ, повышение кооперации между национальными ВС и военно-промышленными комплексами стран Евросоюза. Сроки принятия данного БПЛА на вооружение не определены.
Крупногабаритные и тяжелые беспилотные машины третьего класса в большинстве своем также представлены вертолетами. Причем это безэкипажные модификации пилотируемых летательных аппаратов.
По состоянию на 2020 год подавляющее большинство техники данного типа имелось в парке беспилотной авиации ВМС США. Преимущественно это БПЛА MQ-8В и С «Файрскаут» компании «Нортроп-Грумман», предназначенные для поиска, обнаружения и распознавания наземных и надводных целей, выдачи целеуказания корабельным системам оружия, а также для ретрансляции сигналов связи. Они могут использоваться для обеспечения поисково-спасательных операций и транспортировки грузов.
Текущими планами командования американских ВМС предусмотрена закупка 63-64 БПЛА «Файрскаут» обеих модификаций — 30 MQ-8B и 33-34 MQ-8C.
Многоцелевой БПЛА MQ-8B «Файрскаут» разработан на базе вертолета «Швейцер-333». На вооружении ВМС США находится с 2010 года. Аппарат включен в состав вооружения кораблей прибрежной морской зоны. Первые БПЛА MQ-8B были развернуты на фрегате LCS-3 «Форт Уорт» типа «Фридом» в 2014 году. Комплекс включает три БПЛА, станцию управления и вспомогательное оборудование.
Основное разведывательное оборудование — оптико-электронная система AN/AAQ-22D. Рассматривается возможность оснащения машины малогабаритной радиолокационной станцией кругового обзора AN/ZPY-4. Для аппарата разработаны легкосъемные боковые пилоны, на которых кроме авиационных средств поражения могут размещаться контейнеры для загрузки боеприпасов, медикаментов, продовольствия и других грузов. В состав вооружения (максимальная бомбовая нагрузка 160 кг) могут входить противотанковые управляемые ракеты AGM-114 «Хеллфайр», управляемые ракеты APKWS, самонаводящиеся боеприпасы «Бэт» и «Вайпер Страйк», а также ракеты «Стингер» класса «воздух — воздух».
| Основные ТТХ БПЛА | ||||||
| ScanEagle | RQ-21A | S-100 | AWHERO | MQ-8B | MQ-8С | |
| Масса, кг: | ||||||
| — максимальная взлетная | 15-16 | 61 | 200 | 205 | 1429 | 2380 |
| — пустого летательного аппарата | 10 | 34 | 100-110 | 120 | ||
| — топлива | 3 | до 8,6 | 42 | 85 | ||
| — полезной нагрузки (максимальная) | 2 | до 22 | до 50 | 272 | 1300 | |
| Максимальная скорость полета, км/ч | 100 | 170 | 240 | 170 | 200 | 250 |
| Крейсерская скорость полета, км/ч | 90 | 102 | 3000 | |||
| Практический потолок, м | 5700 | 6100 | 5500 | (с полезной нагрузкой 35 кг) 6 | 6100 | 6000 |
| Радиус действия, км | 120 | 100 | 180 | |||
| Продолжительность полета, ч | 20 | 24 | 6 | 6-8 | 15 | |
| Длина, м (длина х высота х ширина) | 1,5 | 2,2 | (3,1х1 х1,2) | (3,7х1,2 х1,05) | 6,9 | 10,6 |
| Размах крыла, м | 3,1 | 4,8 | 3,4 | |||
| Диаметр несущего винта, м | 4 | 8,4 | 10,7 | |||
1 В 1998 году компания «Инситу» совместно с университетом штата Вашингтон продемонстрировала потенциальные возможности аппарата данного класса «Аэрозонд» по имени «Лайма», успешно осуществив первый в мире трансатлантический перелет (из г. Ньюфаундленд в Шотландию). При этом, по заявлению разработчиков, на преодоление 3700 км ему потребовалось 5,6 л бензина.
Ньюфаундленд в Шотландию). При этом, по заявлению разработчиков, на преодоление 3700 км ему потребовалось 5,6 л бензина.
2 Эксплуатировался на 14 типах кораблей, от рыболовецкой шхуны длиной 18 м («Шаклетон») до судна передового базирования длиной 277 м («Стокхэм»).
(Окончание следует)
Зарубежное военное обозрение. — 2021. — №1. — С. 80-85
Микролетательный аппарат с базовым риском эксплуатации
Введение
Беспилотные летательные аппараты (БПЛА), также называемые беспилотными авиационными системами (БАС), применимы для решения нескольких задач, таких как мониторинг и борьба с вредителями в сельском хозяйстве 1,2,3, 4 , получение изображений для геологической разведки, добычи полезных ископаемых и фотограмметрии 5,6,7,8 , мониторинг бедствий, поиск и спасание 9,10,11 , мониторинг атмосферы 12,13 , съемка земных и водная дикая природа 14,15 , осмотр линий и сооружений в умных городах 16,17 , мониторинг окружающей среды 18,19 и морской надзор 20 , а также несколько других. Что касается механической конструкции и конструкции БПЛА, их можно условно разделить на два класса: (1) БПЛА с неподвижным крылом и (2) БПЛА с вращающимся крылом. Обратите внимание, что у каждого класса есть неотъемлемые свойства с лучшей применимостью, которая зависит от типа прикладной задачи 21 . Одно- или многороторные БПЛА являются наиболее распространенными беспилотными летательными аппаратами, встречающимися на рынке, благодаря их простоте использования и маневренности. Он обеспечивает зависание, буквально остановку в воздухе, а также вертикальный взлет и посадку. Тем не менее, его энергопотребление в целом велико, поэтому он имеет ограниченную автономность полета (расстояние и продолжительность полета). Это не главная проблема БПЛА с неподвижным крылом, в основном с двигателями внутреннего сгорания, которые могут преодолевать большие расстояния и выполнять полеты большей продолжительности. Даже электрические могут быть более эффективными, чем мультироторные, в этих требованиях к пройденному расстоянию и времени полета.
Что касается механической конструкции и конструкции БПЛА, их можно условно разделить на два класса: (1) БПЛА с неподвижным крылом и (2) БПЛА с вращающимся крылом. Обратите внимание, что у каждого класса есть неотъемлемые свойства с лучшей применимостью, которая зависит от типа прикладной задачи 21 . Одно- или многороторные БПЛА являются наиболее распространенными беспилотными летательными аппаратами, встречающимися на рынке, благодаря их простоте использования и маневренности. Он обеспечивает зависание, буквально остановку в воздухе, а также вертикальный взлет и посадку. Тем не менее, его энергопотребление в целом велико, поэтому он имеет ограниченную автономность полета (расстояние и продолжительность полета). Это не главная проблема БПЛА с неподвижным крылом, в основном с двигателями внутреннего сгорания, которые могут преодолевать большие расстояния и выполнять полеты большей продолжительности. Даже электрические могут быть более эффективными, чем мультироторные, в этих требованиях к пройденному расстоянию и времени полета.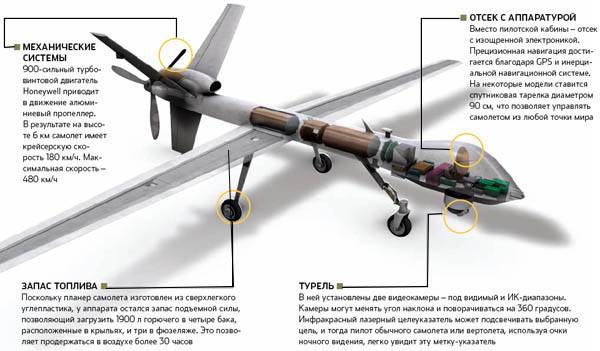 Это в основном потому, что энергетическая матрица, необходимая для подъема, меньше. Использование крыла с определенной минимальной скоростью обеспечивает необходимую подъемную силу при меньших энергозатратах, чем мультиротор. Наконец, мы можем добавить гибридный класс (3), который объединяет предыдущие (1) и (2) классы в единую систему БПЛА, способную выполнять как вертикальные, так и горизонтальные полеты с одной и той же платформой 22 . В этом случае одно- или многовинтовой винт, как правило, с электрическим приводом, обеспечивает подъемную силу, необходимую при вертикальном взлете и посадке, а также при зависании в воздухе. Обратите внимание, что зависание может быть полезно в миссиях, которые заслуживают остановки в воздухе, например, для лучшего наблюдения за какой-то желаемой функцией. Он также может выполнять горизонтальный полет с помощью электрических винтов или пропеллеров внутреннего сгорания, которые воздействуют на поверхность крыла, обеспечивая подъемную силу, которая поддерживает самолет в воздухе и в то же время толкает его вперед.
Это в основном потому, что энергетическая матрица, необходимая для подъема, меньше. Использование крыла с определенной минимальной скоростью обеспечивает необходимую подъемную силу при меньших энергозатратах, чем мультиротор. Наконец, мы можем добавить гибридный класс (3), который объединяет предыдущие (1) и (2) классы в единую систему БПЛА, способную выполнять как вертикальные, так и горизонтальные полеты с одной и той же платформой 22 . В этом случае одно- или многовинтовой винт, как правило, с электрическим приводом, обеспечивает подъемную силу, необходимую при вертикальном взлете и посадке, а также при зависании в воздухе. Обратите внимание, что зависание может быть полезно в миссиях, которые заслуживают остановки в воздухе, например, для лучшего наблюдения за какой-то желаемой функцией. Он также может выполнять горизонтальный полет с помощью электрических винтов или пропеллеров внутреннего сгорания, которые воздействуют на поверхность крыла, обеспечивая подъемную силу, которая поддерживает самолет в воздухе и в то же время толкает его вперед. Обратите внимание, что этот тип БПЛА должен иметь надежную систему управления, особенно для обеспечения плавного перехода между вертикальной и горизонтальной конфигурациями полета. В этом классе самолеты варьируются от тех, что похожи на традиционные самолеты, до летающих крыльев. Те, у которых больше автономности полета, в основном используют двигатели внутреннего сгорания, кроме того, существуют полностью электрические версии. Гибридные модели БПЛА все еще являются предметом исследований и разработок 23 , кроме того некоторые из них имеются в наличии при производстве и эксплуатации 24,25,26,27,28,29 .
Обратите внимание, что этот тип БПЛА должен иметь надежную систему управления, особенно для обеспечения плавного перехода между вертикальной и горизонтальной конфигурациями полета. В этом классе самолеты варьируются от тех, что похожи на традиционные самолеты, до летающих крыльев. Те, у которых больше автономности полета, в основном используют двигатели внутреннего сгорания, кроме того, существуют полностью электрические версии. Гибридные модели БПЛА все еще являются предметом исследований и разработок 23 , кроме того некоторые из них имеются в наличии при производстве и эксплуатации 24,25,26,27,28,29 .
Наше исследование в этой работе посвящено одному конкретному типу, классифицируемому как микро-БПЛА (или просто БЛА), который относится к первому классу (1) с неподвижным крылом. Мы выбрали этот тип главным образом из-за его более простого цикла разработки и возможности уменьшения повреждений, вызванных авариями, которые легче контролировать в случае этих очень маленьких БПЛА. На самом деле, наша работа мотивирована исследовательским проектом, который мы представили и который был одобрен по публичному призыву бразильского спонсорского агентства FINEP 30 . Ядром проекта является разработка прототипа микро-БПЛА, который соответствует основным спецификациям вызова, который в основном заключается в развертывании БПЛА массой 0,200 кг, который может летать около одного часа и достигать расстояния 10 км. В нашем проекте также желательно уменьшить вероятность ущерба, вызванного авариями, и это является одной из основных проблем в настоящее время в связи с увеличением скорости и разнообразия использования БПЛА. Несколько исследователей работали над прогнозированием таких опасных ситуаций для человека 31 , а также на разработку систем предотвращения столкновений 32,33,34 , использование систем с сбросом при падении для снижения удара 35,36 , и даже использование систем подушек безопасности 37 . Параллельно с этими разработками правительства во всем мире, как правило, под руководством или при поддержке научного сообщества, предложили и утвердили свои регулирующие законы в соответствии с развитием и использованием БПЛА 38,39 .
На самом деле, наша работа мотивирована исследовательским проектом, который мы представили и который был одобрен по публичному призыву бразильского спонсорского агентства FINEP 30 . Ядром проекта является разработка прототипа микро-БПЛА, который соответствует основным спецификациям вызова, который в основном заключается в развертывании БПЛА массой 0,200 кг, который может летать около одного часа и достигать расстояния 10 км. В нашем проекте также желательно уменьшить вероятность ущерба, вызванного авариями, и это является одной из основных проблем в настоящее время в связи с увеличением скорости и разнообразия использования БПЛА. Несколько исследователей работали над прогнозированием таких опасных ситуаций для человека 31 , а также на разработку систем предотвращения столкновений 32,33,34 , использование систем с сбросом при падении для снижения удара 35,36 , и даже использование систем подушек безопасности 37 . Параллельно с этими разработками правительства во всем мире, как правило, под руководством или при поддержке научного сообщества, предложили и утвердили свои регулирующие законы в соответствии с развитием и использованием БПЛА 38,39 . Например, бразильское национальное агентство гражданской авиации (ANAC) с 2017 года публикует Общие требования к беспилотным летательным аппаратам гражданского назначения (сокращенно RBAC-E-9).4). Эти правила делят использование БПЛА на два класса: (1) рекреационные и (2) коммерческие или корпоративные. Кроме того, существуют различные требования в соответствии с другими 3 классами, которые определены в отношении максимально допустимого взлетного веса (MTW). Наше предложение имеет вес менее 0,150 кг, что соответствует классу 3 (до 0,250 кг). В этом классе большинство требований правил, следующих за RBAC-E-94 40 , игнорируются, за исключением одного, в котором говорится, что возраст оператора должен быть старше 18 лет. Эти принятые правила напоминают требования конкурса MAV 41,42,43 . Следовательно, наше основное предложение состоит в том, чтобы разработать микро-БПЛА с неподвижным крылом, который весит до 0,200 кг и может летать один час и 10 км, обеспечивая в то же время очень низкий риск для установок и людей.
Например, бразильское национальное агентство гражданской авиации (ANAC) с 2017 года публикует Общие требования к беспилотным летательным аппаратам гражданского назначения (сокращенно RBAC-E-9).4). Эти правила делят использование БПЛА на два класса: (1) рекреационные и (2) коммерческие или корпоративные. Кроме того, существуют различные требования в соответствии с другими 3 классами, которые определены в отношении максимально допустимого взлетного веса (MTW). Наше предложение имеет вес менее 0,150 кг, что соответствует классу 3 (до 0,250 кг). В этом классе большинство требований правил, следующих за RBAC-E-94 40 , игнорируются, за исключением одного, в котором говорится, что возраст оператора должен быть старше 18 лет. Эти принятые правила напоминают требования конкурса MAV 41,42,43 . Следовательно, наше основное предложение состоит в том, чтобы разработать микро-БПЛА с неподвижным крылом, который весит до 0,200 кг и может летать один час и 10 км, обеспечивая в то же время очень низкий риск для установок и людей. Мы сократили все эти характеристики до Micro-B.R.O.S.H UAV (или Micro Basic Risk Operation Self Handled UAV), поскольку эта тема является одной из горячих тем в области исследований беспилотных летательных аппаратов 31,44 .
Мы сократили все эти характеристики до Micro-B.R.O.S.H UAV (или Micro Basic Risk Operation Self Handled UAV), поскольку эта тема является одной из горячих тем в области исследований беспилотных летательных аппаратов 31,44 .
Брандт и др. 44 описывает способ выбора конфигурации БПЛА (беспилотного летательного аппарата) с низким уровнем риска, включая методологию определения размера и оптимизации формы. Эти исследователи работают как с БПЛА с двигателем внутреннего сгорания, так и с электрическим двигателем. Самолет с электрическим двигателем описывается в той мере, в какой он отличается от самолета, работающего на топливе. При проектировании небольшого БПЛА они проверяют методологию на предмет требуемой производительности и полезной нагрузки. Наш подход был разработан в некоторой степени по этой модели, с несколькими промежуточными прототипами, созданными для достижения наилучшего из них. Следовательно, мы используем экспериментальный дизайн с парадигмой прототипирования, создавая несколько разных моделей БПЛА во время наших исследований с использованием передовых технологий.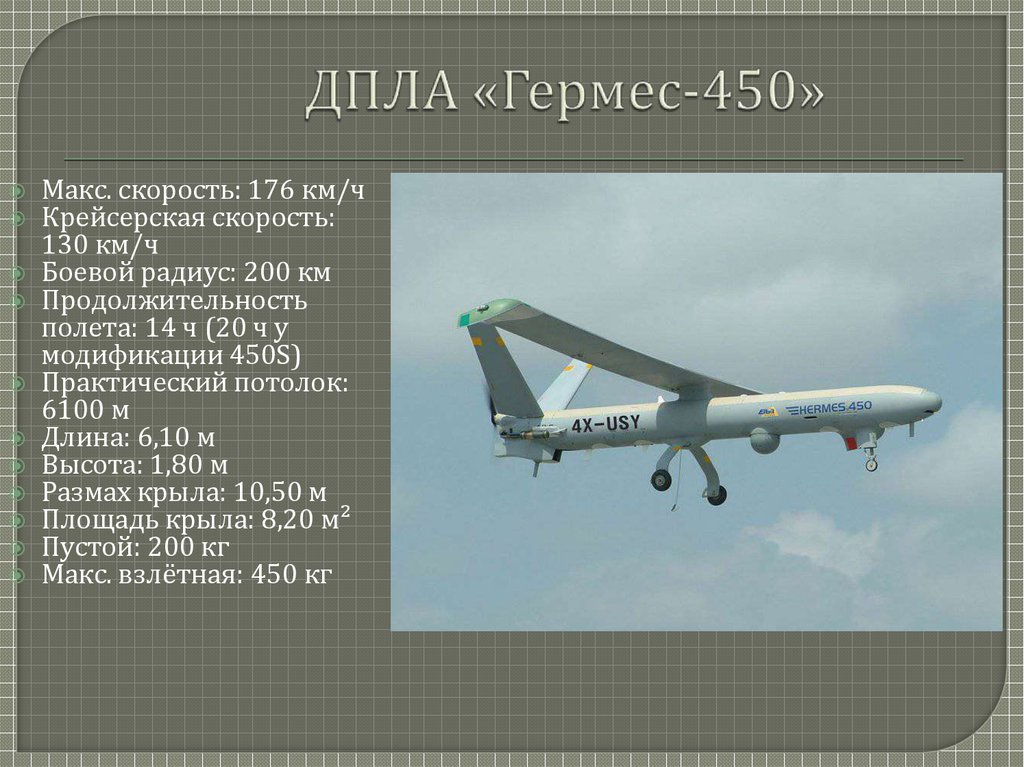 Мы также провели теоретические исследования, основанные на моделировании, для определения большинства частей архитектурного проекта, чтобы решить неустойчивость, вызванную порывами ветра во время полета, и другие возникающие более мелкие проблемы. На сегодняшний день у нас есть рабочий прототип, который показал свою эффективность в нескольких полетах, которые мы выполняем во время испытаний. Все прототипы прошли испытания в экстремальных условиях ветра, которые случаются на северо-востоке Бразилии, и выбранный из них продемонстрировал устойчивость при порывах ветра, тем самым удовлетворив нашим требованиям. Его первые проекты были поданы на патент 45 и впервые опубликовано на конференции 46 . Предыдущая работа была усовершенствована во всех ее аспектах благодаря новым разработкам и экспериментальным результатам, которые мы представляем в текущей рукописи. Кроме того, чтобы сделать нашу работу воспроизводимой, здесь мы опишем наш методологический подход более подробно.
Мы также провели теоретические исследования, основанные на моделировании, для определения большинства частей архитектурного проекта, чтобы решить неустойчивость, вызванную порывами ветра во время полета, и другие возникающие более мелкие проблемы. На сегодняшний день у нас есть рабочий прототип, который показал свою эффективность в нескольких полетах, которые мы выполняем во время испытаний. Все прототипы прошли испытания в экстремальных условиях ветра, которые случаются на северо-востоке Бразилии, и выбранный из них продемонстрировал устойчивость при порывах ветра, тем самым удовлетворив нашим требованиям. Его первые проекты были поданы на патент 45 и впервые опубликовано на конференции 46 . Предыдущая работа была усовершенствована во всех ее аспектах благодаря новым разработкам и экспериментальным результатам, которые мы представляем в текущей рукописи. Кроме того, чтобы сделать нашу работу воспроизводимой, здесь мы опишем наш методологический подход более подробно.
Таким образом, наша общая цель в этой работе — сделать шаг вперед к архитектурному дизайну БПЛА с очень малыми размерами и весом, который может уменьшить ущерб для установок и людей. Мы можем перечислить несколько вкладов работы как:
- 1.
Основным научным вкладом является архитектурный проект MAV с подробной документацией, включая методы определения подъемной силы, тяги, лобового сопротивления, минимальной скорости полета, максимального времени полета и дальности (автономии), а также другие вопросы, которые нам предстоит решить, связанные с разработка самолета.
- 2.
В качестве технологического продукта мы предлагаем и построили микро БЛА крыльчатого типа с характеристиками базовой самоуправляемой платформы (Микро-Брош).
- 3.

Наш прототип был подтвержден практическими экспериментами, в том числе несколькими испытаниями, проведенными с БПЛА, результаты которых подтвердили его летные возможности.
- 4.
В качестве последнего (технического) вклада мы понимаем, что эта работа представляет собой хороший стартовый документ для исследователей, которые намереваются разработать БПЛА или заняться этой областью.
Наше текущее решение имеет вес от 0,080 кг до 0,200 кг в зависимости от количества установленных устройств и полезной нагрузки. На основании экспериментальных исследований, в ходе которых мы изготовили несколько прототипов, мы выбираем БПЛА типа «крыло» с размахом крыльев от 0,20 м до 0,30 см. Единственный винт, толкающий БПЛА, локализован в центре тяжести и защищен большей частью летательного аппарата, что снижает вероятность повреждений при авариях, которые в конечном итоге могут произойти, в основном, на взлете или в полете. Однако возможна и конфигурация, когда воздушный винт установлен в хвостовой части. Это очень желательная характеристика, которая делает эту модель хорошим выбором для применения в населенных пунктах. Далее мы описываем экспериментальные исследования и исследования, которые были проведены, включая проектирование и строительство окончательного прототипа.
Однако возможна и конфигурация, когда воздушный винт установлен в хвостовой части. Это очень желательная характеристика, которая делает эту модель хорошим выбором для применения в населенных пунктах. Далее мы описываем экспериментальные исследования и исследования, которые были проведены, включая проектирование и строительство окончательного прототипа.
Сопутствующие работы
Многороторные БПЛА, в основном известные как дроны , в настоящее время являются наиболее используемыми малыми БПЛА, поскольку они имеют более простое управление и более легкий процесс управления, чем БПЛА с неподвижным крылом. Вертикальный взлет и посадка, а также возможность зависания — их главные преимущества. Однако хорошо известно, что им не хватает возможности полета на большие расстояния 47 , так как тип неподвижного крыла является лучшим выбором, когда это требуется. Тем не менее, с БПЛА с неподвижным крылом возникает сложность при переходе к еще меньшим масштабам 48 , что является нашим основным требованием. Значительная часть подъемной силы снижается, когда площадь крыла становится очень маленькой из-за аэродинамики конструкции. Известные профили крыла с малой площадью на очень малых авиационных системах приводят к числам Рейнольдса всего 10 000–200 000, что оказывает большее влияние на устойчивость полета. Эта проблема возникает в основном при наличии определенных погодных условий, таких как незначительные колебания температуры воздуха, влажности и давления. Следовательно, эти самолеты меньшего размера требуют дополнительных исследований и усилий по развитию, и это является одной из самых горячих тем, изучаемых в настоящее время, кроме того, что это было не так давно 49 . Помимо того, что в литературе фигурируют различные классификации БПЛА 47 , для простоты в данной работе мы принимаем собственную классификацию с учетом размаха крыла и веса. В соответствии с принятой классификацией летательные аппараты подразделяются на большие (или большие) размеры (1), малые размеры (2), очень маленькие (или миниатюрные) размеры (3) и микро-БЛА или БЛА (4).
Значительная часть подъемной силы снижается, когда площадь крыла становится очень маленькой из-за аэродинамики конструкции. Известные профили крыла с малой площадью на очень малых авиационных системах приводят к числам Рейнольдса всего 10 000–200 000, что оказывает большее влияние на устойчивость полета. Эта проблема возникает в основном при наличии определенных погодных условий, таких как незначительные колебания температуры воздуха, влажности и давления. Следовательно, эти самолеты меньшего размера требуют дополнительных исследований и усилий по развитию, и это является одной из самых горячих тем, изучаемых в настоящее время, кроме того, что это было не так давно 49 . Помимо того, что в литературе фигурируют различные классификации БПЛА 47 , для простоты в данной работе мы принимаем собственную классификацию с учетом размаха крыла и веса. В соответствии с принятой классификацией летательные аппараты подразделяются на большие (или большие) размеры (1), малые размеры (2), очень маленькие (или миниатюрные) размеры (3) и микро-БЛА или БЛА (4).
БПЛА большого и малого размера
На рисунке 1 показаны некоторые выбранные БПЛА большого (1) и малого (2) размера. Одним из самых известных крупногабаритных БПЛА является Global Hawk с размахом крыльев 390,9 м и может взлетать с максимальной массой 14,6 тонны, производства Northrop Grumman. Вторым БПЛА с аналогичным применением и характеристиками является Predator-B с размахом крыла 20 м и взлетной массой 4,7 тонны производства General Atomics. Среди малогабаритных БПЛА (2) можно выделить FT-Altea массой 80 кг и размахом крыла 6 м, производства Flightech Systems Europe 50 , Lockheed martin X-56 A и B, с размахом крыла 8,4 м и примерно 86 кг, и Nauru 500C с размахом крыла 2,32 м и максимальной взлетной массой 25 кг производства XMobots 51 . Самолеты, перечисленные выше, создают несколько проблем, которые регулируются авиационными организмами в большинстве стран и требуют больших сооружений и логистики для их эксплуатации, что ограничивает их применение. Как правило, им нужны адекватные взлетно-посадочные полосы для взлета и посадки, и они требуют высоких затрат на приобретение и обслуживание. Кроме того, их относительно легко обнаружить и отследить, и это может быть преимуществом или проблемой в зависимости от приложения. Тем не менее, большинство опасений регулирующих органов связаны с безопасностью как людей, так и объектов в районе эксплуатации, в основном, при их полетах над населенными пунктами. В зависимости от применения они могут быть такими же или более опасными, чем пилотируемый самолет.
Как правило, им нужны адекватные взлетно-посадочные полосы для взлета и посадки, и они требуют высоких затрат на приобретение и обслуживание. Кроме того, их относительно легко обнаружить и отследить, и это может быть преимуществом или проблемой в зависимости от приложения. Тем не менее, большинство опасений регулирующих органов связаны с безопасностью как людей, так и объектов в районе эксплуатации, в основном, при их полетах над населенными пунктами. В зависимости от применения они могут быть такими же или более опасными, чем пилотируемый самолет.
Основные системы БПЛА с неподвижным крылом классов (1) большой и (2) малый.
Полноразмерное изображение
БПЛА очень малого размера
При уменьшении размера мы переходим к еще меньшим летательным аппаратам, рассматриваемым как очень маленькие здесь или (3) на рис. 2, с размахом крыла от 1,0 м до 2,0 м и массой от 1 кг и 5 кг. Их основное использование относится к развлекательным и военным (наблюдение) приложениям. У них малая грузоподъемность и уменьшенное время полета, к тому же иногда они отвечают потребностям какого-то конкретного проекта, в зависимости от поставленной задачи. Как правило, эти БПЛА имеют электрические силовые агрегаты, а взлет осуществляется путем подбрасывания их в воздух от руки или с помощью некоторого упругого импульса. Существует несколько проектов с такими характеристиками, разработанных для самых разных серьезных приложений 52,53,54,55 . На самом деле стремление к миниатюризации можно частично отнести к применению в армии США, которая использует очень маленькие самолеты с 1999 года. Первым из них, как известно, является RQ-11 Raven 54 , разработанный AeroVironment. С размахом крыла 1,4 м и массой 1,9 кг это один из самых широко используемых БПЛА в мире, который в основном используется на войне, но также включает и другие приложения. Он имеет около 90 минут полета с батареями и требует одного оператора для его сборки и запуска. Desert Hawk — еще один БПЛА очень небольшого размера с размахом крыльев 1,32 м и весом 3,17 кг, разработанный компанией Lockheed Martin 9.
У них малая грузоподъемность и уменьшенное время полета, к тому же иногда они отвечают потребностям какого-то конкретного проекта, в зависимости от поставленной задачи. Как правило, эти БПЛА имеют электрические силовые агрегаты, а взлет осуществляется путем подбрасывания их в воздух от руки или с помощью некоторого упругого импульса. Существует несколько проектов с такими характеристиками, разработанных для самых разных серьезных приложений 52,53,54,55 . На самом деле стремление к миниатюризации можно частично отнести к применению в армии США, которая использует очень маленькие самолеты с 1999 года. Первым из них, как известно, является RQ-11 Raven 54 , разработанный AeroVironment. С размахом крыла 1,4 м и массой 1,9 кг это один из самых широко используемых БПЛА в мире, который в основном используется на войне, но также включает и другие приложения. Он имеет около 90 минут полета с батареями и требует одного оператора для его сборки и запуска. Desert Hawk — еще один БПЛА очень небольшого размера с размахом крыльев 1,32 м и весом 3,17 кг, разработанный компанией Lockheed Martin 9.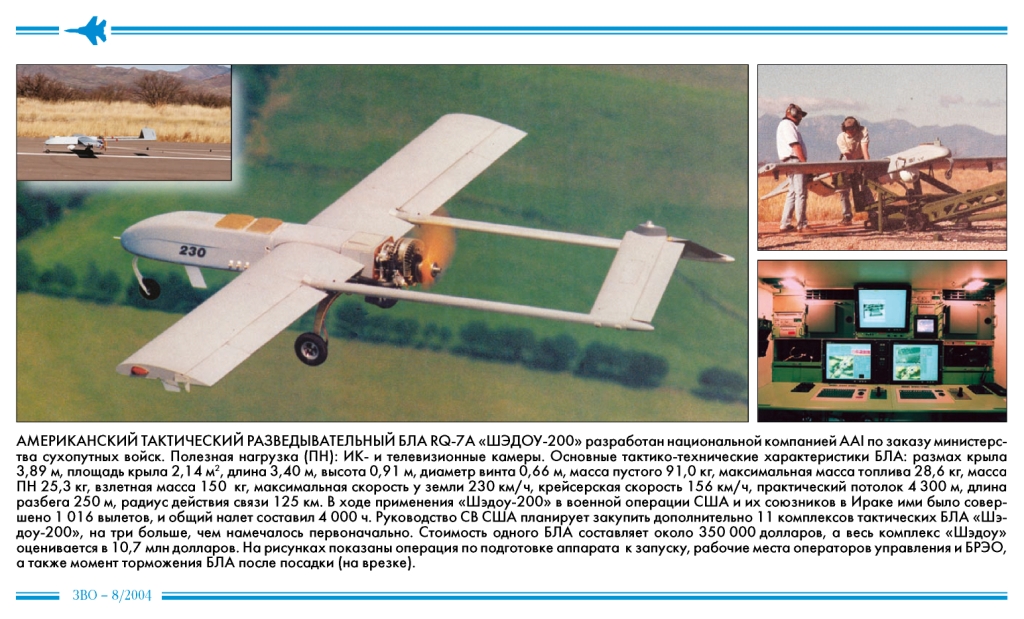 0005 55 . Он имеет примерно один час автономной работы и может быть запущен с помощью банджи-шнура, а также вручную. Мы видим, что эти очень маленькие беспилотные летательные аппараты с фиксированным крылом и моделью самолета, варьирующейся от традиционных самолетов до летающих крыльев, уже хорошо разработаны 52,54,55,56,57 . Их использование в сочетании с RTK и системами визуализации представляет собой уже устоявшуюся технологически и инновационную практику, и в настоящее время они коммерчески доступны.
0005 55 . Он имеет примерно один час автономной работы и может быть запущен с помощью банджи-шнура, а также вручную. Мы видим, что эти очень маленькие беспилотные летательные аппараты с фиксированным крылом и моделью самолета, варьирующейся от традиционных самолетов до летающих крыльев, уже хорошо разработаны 52,54,55,56,57 . Их использование в сочетании с RTK и системами визуализации представляет собой уже устоявшуюся технологически и инновационную практику, и в настоящее время они коммерчески доступны.
Основные системы БПЛА с неподвижным крылом считаются очень маленькими (3) в текущей работе.
Полноразмерное изображение
От миниатюрных до микросистем БПЛА
Основное отличие вышеуказанных работ от настоящего предложения заключается в том, что предлагаемый здесь летательный аппарат должен быть еще меньше, чтобы соответствовать требованиям нашего проекта и не представлять опасности для его оператора ни людям, ни установкам, которые могут находиться в районе операции. Мы провели обширный поиск в литературе, в котором мы могли найти несколько подходов, касающихся летательных аппаратов, от миниатюрных до микро-БПЛА (или БЛА), как показано на рис. 3. Мы видим, что ни один из них не похож на наш с точки зрения его работы. режим и размер. Кроме того, мы отмечаем быстрый рост в последнее десятилетие количества исследований, посвященных МЛА, отдельно рассматривающих БПЛА с неподвижным крылом и СВВП, а также гибридных 58 . Мы наблюдаем, что большинство из них имеют ограничения по гибкости, времени полета и грузоподъемности и не подходят для некоторых задач, в основном задач с большой продолжительностью.
Мы провели обширный поиск в литературе, в котором мы могли найти несколько подходов, касающихся летательных аппаратов, от миниатюрных до микро-БПЛА (или БЛА), как показано на рис. 3. Мы видим, что ни один из них не похож на наш с точки зрения его работы. режим и размер. Кроме того, мы отмечаем быстрый рост в последнее десятилетие количества исследований, посвященных МЛА, отдельно рассматривающих БПЛА с неподвижным крылом и СВВП, а также гибридных 58 . Мы наблюдаем, что большинство из них имеют ограничения по гибкости, времени полета и грузоподъемности и не подходят для некоторых задач, в основном задач с большой продолжительностью.
Основное неподвижное крыло, которое мы рассматриваем в классе (4) в текущей работе, от миниатюрных систем до микро-БПЛА (MAV).
Полноразмерное изображение
Наши результаты по поиску небольших проектов БПЛА включают в себя обзорную статью, в которой авторы составляют очень хорошую сводку из 132 доступных прототипов, которая по-прежнему актуальна и в настоящее время, кроме того, что это не совсем новая работа 47 . В нем упоминается БЛА Black-Widon длиной всего 0,015 м, как показано на рис. 3, как один из первых микро-БПЛА с неподвижным крылом, который был разработан в 1999 году компанией AeroVironment 47 . Первый прототип Black Widon весит 0,056 кг и совершил 22-минутный полет на крейсерской скорости 40 км/ч, передав черно-белое видео 59 . Последняя заявленная версия имеет вес 0,080 кг и способна выполнять полеты продолжительностью до 30 минут на максимальной высоте 235 м, однако с максимальной дальностью 1,8 км, что выходит за рамки желаемого диапазона 59 . С тех пор проект Black-Widon был переименован в WASP с некоторой оптимизацией конструкции крыла и уменьшением потребления батареи 47 . Как уже говорилось, меньшая версия была заменена расширенной с размерами не менее 0,33 м, названными как Wasp, Wasp Block II и Wasp Block III на рис. 3. Обратите внимание, что она больше, чем наша. Помимо того, что серия Wasp имеет большое сходство с нашим предложением, мы считаем, что Mosquito наиболее близок к нашему 60 , в основном из-за его большего рабочего диапазона.
В нем упоминается БЛА Black-Widon длиной всего 0,015 м, как показано на рис. 3, как один из первых микро-БПЛА с неподвижным крылом, который был разработан в 1999 году компанией AeroVironment 47 . Первый прототип Black Widon весит 0,056 кг и совершил 22-минутный полет на крейсерской скорости 40 км/ч, передав черно-белое видео 59 . Последняя заявленная версия имеет вес 0,080 кг и способна выполнять полеты продолжительностью до 30 минут на максимальной высоте 235 м, однако с максимальной дальностью 1,8 км, что выходит за рамки желаемого диапазона 59 . С тех пор проект Black-Widon был переименован в WASP с некоторой оптимизацией конструкции крыла и уменьшением потребления батареи 47 . Как уже говорилось, меньшая версия была заменена расширенной с размерами не менее 0,33 м, названными как Wasp, Wasp Block II и Wasp Block III на рис. 3. Обратите внимание, что она больше, чем наша. Помимо того, что серия Wasp имеет большое сходство с нашим предложением, мы считаем, что Mosquito наиболее близок к нашему 60 , в основном из-за его большего рабочего диапазона. Этот БПЛА был разработан компанией Israel Aerospace Industries (IAI) в двух версиях: 1.0 и 1.5. Две версии имеют размах крыла 0,33 м. Их вес составляет 0,25 кг для версии 1,0 и 0,5 кг для версии 1,5, то есть равен или больше нашего. Этот MAV может летать с максимальной скоростью 46 км/ч на высоте 200 м. Тем не менее, мы выяснили, что он может летать в радиусе 3 км вокруг базовой станции, помимо возможности выполнять полеты за пределами прямой видимости (BVLOS). Он устойчив в самых суровых ветровых условиях при порывах ветра до 25 узлов, а его продолжительность полета составляет около 40 минут. Mosquito обеспечивает прямую трансляцию с нескольких камер и, помимо других возможностей, имеет GNSS. На данный момент мы видим, что вышеупомянутые MAV, кроме Black Widon, имеют размер крыла более 0,30 м, что является одним из наших основных требований (на самом деле, у нас может быть 0,25 м). Тем не менее, мы также нашли другие платформы в классе вращающихся крыльев, такие как Micro-Mosquito и Black Hornet.
Этот БПЛА был разработан компанией Israel Aerospace Industries (IAI) в двух версиях: 1.0 и 1.5. Две версии имеют размах крыла 0,33 м. Их вес составляет 0,25 кг для версии 1,0 и 0,5 кг для версии 1,5, то есть равен или больше нашего. Этот MAV может летать с максимальной скоростью 46 км/ч на высоте 200 м. Тем не менее, мы выяснили, что он может летать в радиусе 3 км вокруг базовой станции, помимо возможности выполнять полеты за пределами прямой видимости (BVLOS). Он устойчив в самых суровых ветровых условиях при порывах ветра до 25 узлов, а его продолжительность полета составляет около 40 минут. Mosquito обеспечивает прямую трансляцию с нескольких камер и, помимо других возможностей, имеет GNSS. На данный момент мы видим, что вышеупомянутые MAV, кроме Black Widon, имеют размер крыла более 0,30 м, что является одним из наших основных требований (на самом деле, у нас может быть 0,25 м). Тем не менее, мы также нашли другие платформы в классе вращающихся крыльев, такие как Micro-Mosquito и Black Hornet. Micro-Mosquito — это игрушка-вертолет с двойной спиралью, которая имеется в продаже и не имеет характеристик БПЛА, поскольку управляется дистанционно. Black-Hornet, показанный на рис. 4, представляет собой микровертолет, разработанный Prox Dynamics, с полными характеристиками БПЛА. Он весит всего 0,033 кг и может летать около 25 минут со скоростью до 10 м/с, с возможностью BVLOS и дальностью полета до 2 км. Рассматриваемый сообществом БПЛА как полностью автономный БЛА, он может обеспечивать передачу видео и изображений в режиме реального времени.
Micro-Mosquito — это игрушка-вертолет с двойной спиралью, которая имеется в продаже и не имеет характеристик БПЛА, поскольку управляется дистанционно. Black-Hornet, показанный на рис. 4, представляет собой микровертолет, разработанный Prox Dynamics, с полными характеристиками БПЛА. Он весит всего 0,033 кг и может летать около 25 минут со скоростью до 10 м/с, с возможностью BVLOS и дальностью полета до 2 км. Рассматриваемый сообществом БПЛА как полностью автономный БЛА, он может обеспечивать передачу видео и изображений в режиме реального времени.
Микро БЛА Black Hornet, он частично подходит для нужд нашего проекта, но дальность полета. Размер черного шершня в целом составляет 0,168 см, а вес — 0,033 кг.
Полноразмерное изображение
Строго связанные работы
Как было указано в нашей предыдущей работе на конференции 61 , основой нашей системы БПЛА является фиксированная форма крыла весом до 0,200 кг с размером крыла 0,25 м и автономность один час полета на дальность 10 км.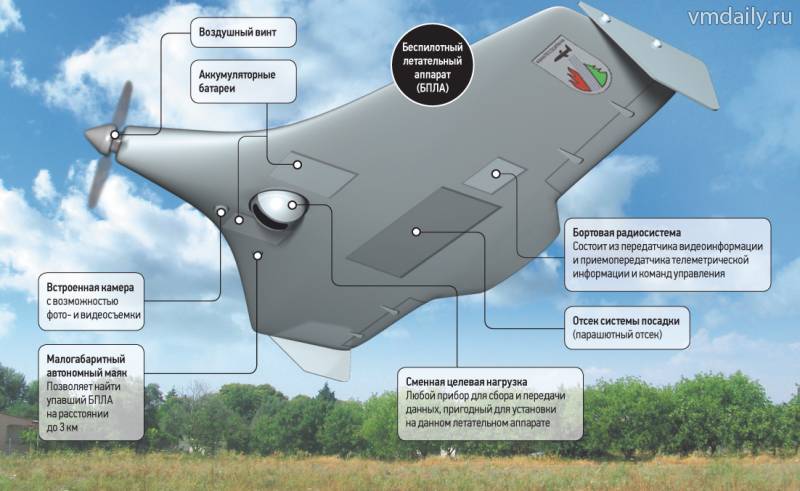 Таким образом, всего мы нашли пять работ с близкими характеристиками, которые в большей степени напоминают наши 59,60,62,63,64 . Первая работа 62 — самый последний проект 62 с размахом крыла 0,45 м и массой 104 г. Он может летать с крейсерской скоростью 7 м/с и автономностью около 2,8 ч полета. Найденный нами второй прототип, также похожий на наш, но не входящий в наши планы, имеет длину 0,38 м, размах крыла 0,91 м и массу 1,15 кг 63 . Не последняя работа, близкая к нашим замыслам, — проект самолета под названием Bidule 9.0084, который начался в 1998 году. Тем не менее, с тех пор эта работа была пересмотрена только в 2006 году. Мы обнаружили размах крыльев 0,41 м, а в их более поздней рукописи 64 не указан вес. Описанный выше Black Widon 59 снят с производства, вероятно, из-за его ограниченной применимости. Компания-производитель создала несколько других БПЛА большего размера, которые в настоящее время имеются в продаже.
Таким образом, всего мы нашли пять работ с близкими характеристиками, которые в большей степени напоминают наши 59,60,62,63,64 . Первая работа 62 — самый последний проект 62 с размахом крыла 0,45 м и массой 104 г. Он может летать с крейсерской скоростью 7 м/с и автономностью около 2,8 ч полета. Найденный нами второй прототип, также похожий на наш, но не входящий в наши планы, имеет длину 0,38 м, размах крыла 0,91 м и массу 1,15 кг 63 . Не последняя работа, близкая к нашим замыслам, — проект самолета под названием Bidule 9.0084, который начался в 1998 году. Тем не менее, с тех пор эта работа была пересмотрена только в 2006 году. Мы обнаружили размах крыльев 0,41 м, а в их более поздней рукописи 64 не указан вес. Описанный выше Black Widon 59 снят с производства, вероятно, из-за его ограниченной применимости. Компания-производитель создала несколько других БПЛА большего размера, которые в настоящее время имеются в продаже. Информация о последней работе (Mosquito) доступна на веб-странице, на которой мы не смогли найти ни статей, ни технической документации, подробно описывающих ее технические проблемы, что необходимо для воспроизводимости 60 .
Информация о последней работе (Mosquito) доступна на веб-странице, на которой мы не смогли найти ни статей, ни технической документации, подробно описывающих ее технические проблемы, что необходимо для воспроизводимости 60 .
Следовательно, мы однозначно выбираем БПЛА Black Widon и Mosquito как работы, которые, по нашему мнению, имеют наиболее близкие характеристики к нашей 59,60 . Сюда входит часть архитектурного решения в виде формы в виде летающего крыла, однако, как было сказано выше, наш БПЛА даже меньше Москита с размахом крыла 0,25 м, что позволяет иметь большую дальность действия, чем Черный Видон. Наш первый прототип мог летать с крейсерской скоростью 12,5 м/с, продолжительность полета составляла около 20 минут или 15 км. На самом деле, эта тема является одной из приоритетных в нашем текущем исследовании, и мы улучшили эту автономность в текущей версии, приблизившись к 45 минутам (приблизительно). В конце концов, основное отличие нашего предложения от обоих аналогичных БПЛА заключается в расположении винта, который находится в центре тяжести (или сзади), что, по нашему мнению, делает его более безопасным, чем Mosquito и Black Widon. Обратите внимание, что это представляет меньшую опасность для установки, ее оператора или другого лица в случае аварии.
Обратите внимание, что это представляет меньшую опасность для установки, ее оператора или другого лица в случае аварии.
Наконец, мы отмечаем особенность, которая по умолчанию является следствием микроразмерных БПЛА, а именно малую эффективную площадь отражения (RCS), также называемую радиолокационной заметностью. Это функция, разработанная для приложений наблюдения, которая в основном определяется на основе формы самолета 65 . Например, это основная характеристика проектов самолетов-разведчиков и бомбардировщиков, таких как дальний SR-71 66 , бомбардировщик F-117 Nighthawk, бомбардировщик B-2 Spirit, истребитель завоевания превосходства в воздухе F22 и многоцелевой F35. Истребитель, к тому же БЛА больших размеров. Наше предложение имеет низкую RCS (радиолокационную чувствительность) и практически незаметно для глаз, в основном на дистанциях более 400 м. Обратите внимание, что это естественная характеристика из-за его микроразмеров, что также облегчает его маскировку после использования.
Методология архитектурного проектирования и строительства
При архитектурном проектировании БПЛА необходимо учитывать несколько ограничений. Первые налагаются правилами организаций гражданской авиации как ANAC RBAC-E Nr 94 40 в Бразилии, которая включает в себя несколько аспектов в каждой категории, как показано в таблице 1. Для нашего проекта требуется БПЛА, который попадает в третий класс (3), однако максимальный вес составляет 0,200 кг. При этом мы избегаем сертификации по большинству ограничений, кроме одного, как видно из таблицы, а именно возраста оператора старше 18 лет. Следовательно, ограничения, такие как низкий риск для установок и людей, помимо спецификаций по размеру, весу и автономности полета, являются основными проблемами, которые необходимо учитывать при концептуальном проектировании. Другими второстепенными проблемами, которые следует учитывать, являются простота сборки/конструкции и низкая стоимость.
Таблица 1 Классы и требования ANAC, учитываемые для проекта БПЛА MicroBrosh.
Полноразмерный стол
Выбор правильной модели прототипа
После анализа нескольких работ, представленных выше, мы видим, что платформа с неподвижным крылом является лучшим выбором, чем платформа с вращающимся крылом, из-за большей автономности как по расстоянию, так и по времени полета. Тем не менее, нам еще предстоит выбрать правильный архитектурный проект. По сути, нам нужно выбирать между несколькими формами самолетов, варьирующимися от самолетов до летательных крыльев, в уличных условиях. Для этого мы провели чисто экспериментальное (практическое) исследование, в ходе которого построили серию прототипов по наиболее распространенным конструкциям, доступным в литературе, и выполнили с ними полеты. Всего мы построили более 15 прототипов, в результате чего 9основные модели, некоторые из них показаны далее. Заметим, что часть из них мы уничтожили во время наших практических полетов, по ряду причин, по мере порывов ветра (основная). Все эти полеты были выполнены сначала в помещении, а затем на открытом воздухе, в условиях сильного ветра, как будет показано далее в разделе «Экспериментальная установка». Ниже мы опишем некоторые из этих моделей, выбранных из 9 прототипов, которые лучше всего показали себя в тестах, которые также будут описаны позже. Мы построили все прототипы из экструдированного полистирола.
Ниже мы опишем некоторые из этих моделей, выбранных из 9 прототипов, которые лучше всего показали себя в тестах, которые также будут описаны позже. Мы построили все прототипы из экструдированного полистирола.
Прототип 4, изготовленный из экструдированного полистирола.
Изображение в полный размер
На рисунке 5 показана базовая конструкция прототипа 4, основанного на профиле Eppler 423. Имеет массивное крыло с размахом 0,30 м и фюзеляж длиной 0,28 м, с тросом 0,10 м. Его общий вес составляет 0,100 кг, включая один бесщеточный микродвигатель (5 г и 2000 кв) с пропеллером \(4\x 2,5\) GWS и микросервоприводы HXT500 5 г с током 650 мА, все они питаются от литиевой батареи 7,4 В. .
Прототип 5 (рис. 6) — первая испытанная модель треугольного крыла с размахом крыла 0,30 м, средним канатом 0,11 м и пещерообразным фюзеляжем длиной 0,20 м. Его общий вес составляет 0,110 кг, включая бесщеточный микродвигатель (10 г и 2000 кв) для толкания винта APC \(7\x 4\) и микросервоприводы HXT500 5 г, которые питаются от литиевой батареи с 7,4 v напряжения и тока 650 мА. Для связи мы используем 4-канальный приемник RC Corona RP 4S1 72 МГц и 9-канальный передатчик JR XP9303H стандарта PCM.
Для связи мы используем 4-канальный приемник RC Corona RP 4S1 72 МГц и 9-канальный передатчик JR XP9303H стандарта PCM.
Прототип 5 — наша первая протестированная модель в форме треугольника, также изготовленная из экструдированного полистирола.
Изображение в полный размер
Затем мы построили прототип 6, следуя модели самолета по умолчанию с верхним крылом в виде нервюр/струн, на основе профиля Bruxel 33 (рис. 7). Он имеет размах крыла 0,40 м и трос 0,10 м, фюзеляж пещерного типа длиной 0,35 м и общий вес 0,130 г. Литиевая батарея массой 10 г с напряжением 7,4 В и током 650 мА обеспечивает питание микродвигателя мощностью 2000 кв с пропеллером APC \(7\x4\) и микросервоприводами HXT500 5 г. Для связи используем 4-канальный приемник Corona RP 4S1 72 МГц и JR XP9.303H 9-канальный стандартный ИКМ-передатчик.
Рисунок 7 Прототип 6, традиционная модель с верхним крылом.
Изображение в полный размер
Прототип 8 (рис. 8) также соответствует модели с верхним крылом, но с размахом крыла 0,30 м и средней длиной каната 0,10 м, а также с фюзеляжем пещерного типа и общим весом 0,100 кг. Он оснащен бесщеточным микродвигателем 10 г и 2000 кв для винта APC \(7\x 4\) и микросервоприводами HXT500 5 г, все они питаются от литиевой батареи с напряжением 7,4 В и током 650 мА. Мы используем 4-канальный приемник Corona RP 4S1 72 МГц и JR XP9.303H 9-канальный стандартный ИКМ-передатчик.
Рисунок 8Прототип 8 в модели самолета с верхним расположением крыла.
Изображение в полный размер
Прототип 9 (рис. 9) — последний, который был спроектирован, построен и испытан (и выбран). Его форма, углы и размеры были выбраны на основе опыта работы с прототипом 5, который был модифицирован. Среди этих основных изменений центральная хорда была увеличена с 0,230 до 0,276 м с целью отодвинуть поверхности управления от центра тяжести, повысить эффективность управления и уменьшить продольную неустойчивость во время полета. Это позволяет повысить эффективность в горизонтальном полете, улучшая летно-технические характеристики.
Задуманная геометрия окончательного прототипа 9 (в форме \(\Delta\) с вырезом в каждой панели).
Изображение полного размера
Из-за наклона поверхностей управления они действуют как команда, смешивающая элероны с рулем высоты. Это было введено, чтобы компенсировать потерю подъемной силы, возникающую во время качения. Эта компенсация обычно может быть применена автопилотом, однако наше решение устраняет необходимость в корректировках, обеспечивая большую устойчивость самолета в полете. 9{\circ }\) показал чрезмерные помехи. Этот наклон оказывает прямое влияние на угол передней кромки, так как боковая хорда крыла, в данном случае равная нулю, совпадает с наклонной линией рулей.
Следовательно, с треугольным крылом, полученным из прототипа 5, оно изготовлено из экструдированного полистирола с размахом крыла 0,25 м и фюзеляжем пещерного типа, общим весом 0,74 г. Он имеет 10-граммовый бесщеточный микродвигатель мощностью 2000 кв для толкания пропеллера APC \(4,5\x 3\) и использует микросервоприводы HXT500 5 g, все питаются от литиевой батареи с напряжением 7,4 В и током 250 мА. 4-канальный приемник Corona RP 4S1 72 МГц, JR XP9.Эту модель дополняет 9-канальный стандартный ИКМ-передатчик 303H. В настоящее время мы добавили к нему автопилот, как это будет видно далее, а также в разделе «Экспериментальная установка». Эта модель имеет наилучшую стабильность среди всех и была выбрана, поэтому мы начнем ее более подробное описание ниже. Конфигурация силового агрегата (толкатель) была основана на прототипе 8.
Геометрическая концепция
Таким образом, мы выбрали летающий змей с геометрией формы \(\Delta\), которая обеспечивает низкий коэффициент лобового сопротивления, при этом почти вся конструкция создает подъемную силу. по сравнению с традиционным самолетом. Тем не менее, подъемная сила может быть снижена из-за эффекта индуктивного сопротивления, который влияет на распределение давления на поверхности крыла. Это хорошо известная проблема в аэродинамике, вызванная перепадом давления в области между выпуском крыла и софитом. Это приводит к тому, что ветер, достигающий вершины крыла, создает вихри на законцовке крыла, возмущающие поле течения, как показано на рис. 10.
Возмущение распределения давления на поверхности крыла полем течения на законцовке крыла.
Изображение в полный размер
Для предотвращения образования вихрей в каждой панели крыла сделан разрез, как показано на рис. 9. Помимо предотвращения образования вихрей во время полета, это увеличивает индуктивное сопротивление и не снижает эффективность поверхностей управления. Следующим шагом является определение простой, но эффективной системы управления движением. Для этого мы используем конфигурацию элевона, поскольку в ней используются только две поверхности управления, приводимые в движение двумя серводвигателями. Самолет может выполнять прокручивающие движения и пыхтение со смешанными движениями элевонов. {circ}\), как показано на рис. 12б. Прокрутка и качка формируются смешанным образом, что обеспечивает частично автоматическую коррекцию. Это делает дистанционное управление пилотом еще проще. 9{\ circ } \) под прямым углом к крылу для обеспечения поперечной устойчивости. Воздушный винт выбранной силовой установки толкающей компоновки в этом варианте расположен близко к центру тяжести, как видно на рис. 13, однако с возможностью нахождения в хвосте самолета в следующем варианте. Здесь в коробке, видимой после пропеллера, выходящей к передней части самолета, установлена электронная система, которая, помимо двигателя для пропеллера, имеет два серводвигателя для движения рулей и, возможно, автопилота. Следующая версия также включает в себя камеру. Вид спереди и сзади нашего первоначального концептуального проекта с его основными размерами и углами показан на рис. 13 и 14 соответственно.
Концептуальный проект MicroBrosh, вид сверху.
Изображение в полный размер
Рис. 14Концептуальный проект MicroBrosh, вид сзади.
Изображение в натуральную величину
Следовательно, включение в наш окончательный прототип большего количества встроенной электроники, особенно автопилота и аккумуляторов, увеличило общий вес самолета, тем самым увеличив необходимую подъемную силу. Итак, для версии с автопилотом и камерой с видеозаписью нам необходимо внести небольшие изменения в конструкцию БПЛА для их поддержки. В основном мы сохраняем базовую конструкцию, но пропорционально увеличиваем габариты самолета, добавляя аэродинамический профиль и убирая поперечный угол. Эти модификации этой второй версии нашего окончательного прототипа можно увидеть на рис. 15, где пропеллер все еще находится в центре. Однако, чтобы поддерживать большую полезную нагрузку и сохранить центр тяжести, у нас есть возможность разместить пропеллер в задней части крыла. Собственно, это сделано для совместной поддержки автопилота и камеры, как будет видно далее, без ущерба для требований безопасности.
Окончательные размеры прототипа.
Полноразмерное изображение
Конструкция прототипа
Мы отмечаем, что серия из 5 предыдущих прототипов с одинаковой конфигурацией была построена и всесторонне протестирована, до финального прототипа, подробно изображенного здесь, который имеет две версии. Для первой версии мы вручную связали крыло, используя плоскую пластину из экструдированного полистирола толщиной 4 мм. С помощью эпоксидной смолы приклеиваем отсек для электроники и вертикальные стабилизаторы. Изготавливаем рули сочленения рычагов и крепежную стенку для винта в сборе из пластины из полистирола толщиной 2 мм. Серводвигатели соединены с шарнирным рычагом рулевых поверхностей стержнями из стекловолокна диаметром 0,5 мм, выполненными с наконечниками из стальной проволоки. Также мы используем прозрачный полистирол с пластиной 0,5 мм для закрытия отсека и 3M Скотч Модель Blenderm для шарнирной функции рулей. Минимальный конечный вес составляет 62 г с одним аккумулятором и пультом дистанционного управления, что соответствует основным требованиям проекта. Однако, как было сказано, для того, чтобы приспособить автопилот и связь с камерой, необходимо внести изменения. Следует добавить еще 0,034 кг для автопилота, кроме системы камер и второго аккумулятора, всего 0,145 кг. Две батареи весят 0,038 кг. Окончательный получившийся прототип с центральным пропеллером можно увидеть на рис. 16 без камеры.
Процесс сборки и сборки окончательного прототипа с пропеллером в центре.
Изображение в полный размер
Окончательный вариант с конфигурацией автопилота, задним пропеллером и камерой показан на рис. 17. Фюзеляж, в котором размещаются компоненты для посадки (включая оборудование для записи карт камер), изготовлен из экструдированной плиты из пенополипропилена. с 3 мм. Мы добавили рельсовое шасси для посадки автопилота. Рельс добавлен, чтобы изменить его положение и упростить настройку центра тяжести. Когда фюзеляж готов, компоненты устанавливаются, и получается окончательная компоновка, показанная на рис. 17. Установленная на самолете камера видна на рис. 18, вид снизу.
Окончательный прототип с пропеллером в хвостовой части.
Изображение в полный размер
Рис. 18Камера, установленная в крыле фюзеляжа (вид сверху).
Полноразмерное изображение
Электроника и система управления на борту
Мы стремимся использовать минимум электрических и электронных компонентов в конструкции силовой установки и систем управления, изначально придумывая базовую электронную архитектуру, показанную на рис. 19. Простая конфигурация позволяет управлять самолетом как с помощью автопилота, так и дистанционно. В версии без автопилота используется модель передатчика Spektrum DX7 2,4 ГГц. Это радио работает с приемником Orange , модель DSM2 Atmega168PA, имеющая систему автоматической гироскопической стабилизации с регулируемым коэффициентом усиления, которую можно включать и выключать с помощью селектора на передатчике даже во время полета. Мы используем наноцифровой серводвигатель Traxxas модели 6348 для управления движением поверхностей. Пропеллер приводится в действие силовым агрегатом на 2000 кВ, трехфазным, в котором используется бесколлекторный двигатель от RC-Hobby. Воздушный винт — GWS модели EP-4025. Контроллер (ESC) от Hobbyking, модель HK-10A, управляет трансмиссией. Один Li-Po 2S с аккумулятором 7,4 В и 240 мАч модели Hyperion G3 массой 0,015 кг обеспечивает необходимое питание для всей установленной системы этой первой версии.
Компоненты для автономного полета, включая автопилот и камеру.
Полноразмерное изображение
Чтобы установить автопилот, показанный на рис. 20, весом 0,034 кг, и дополнительную батарею, мы определяем конфигурацию новой версии, как показано на рис. 19. Эта новая версия имеет плату контроллера марки Radiolink. модель Mini Pix V 1.0 с GPS TS100 Mini M8N, бесколлекторным двигателем мощностью 3800 кВ, аккумулятором марки Hyperion LiPo, моделью G7 SV Si-Graphene с двумя аккумуляторами 7,4 В, емкостью 300 мАч и скоростью разряда 50C. Обратите внимание на систему радиоуправления, которая заменена фирменным передатчиком Futaba модели T8J 2,4 ГГц и приемником модели R2008SB. Этот обмен направлен на использование системы последовательных данных между приемником и автопилотом, что обеспечивает большую точность, чем при использовании ШИМ. Сервоприводы, отвечающие за активацию управляющих поверхностей, остались такими же, как и в радиоуправляемой модели, компоненты подробно описаны в таблице 2. Таким образом, теперь мы можем выполнять автономный полет, что можно сделать, просто настроив его с помощью программного обеспечения Mission Planner как в нашей предыдущей работе 53 . Программное обеспечение Mission Planner имеет открытый исходный код.
Автопилот вошел в прототип.
Изображение полного размера
Таблица 2 Электрические и электронные компоненты, использованные при разработке окончательного прототипа БПЛА MicroBrosh. Полноразмерный стол
Экспериментальная установка
В этой работе мы провели несколько типов экспериментов, чтобы полностью развернуть наш окончательный прототип БПЛА. Сначала, как объяснялось выше, в ходе эмпирического исследования мы построили и протестировали несколько прототипов (9всего более 15 самолетов), чтобы определить тот, который лучше всего отвечает нашим требованиям. Практические испытания (полеты), о которых сообщается первыми в этом разделе, проводятся для определения устойчивости ветра и плавного управления им. После создания прототипа номер 9, который был лучшим во всех тестах, мы переходим к другим подробным тестам, о которых мы сообщаем здесь, чтобы увидеть его несколько аспектов. Сначала мы проводим стендовые испытания для расчета аэродинамических параметров, а также выполняем анализ тяги. Затем мы провели боевые испытания в закрытых помещениях в контролируемых условиях, а также несколько полетов на открытом воздухе при сильном ветре. В этих испытаниях мы использовали параметры, полученные в ходе стендовых испытаний, для питания системы в условиях полевых летных испытаний. Ведь мы разрабатываем последнюю версию нашего прототипа 9, который немного больше (размах крыла 0,30 м), который поддерживает автономный полет и запись камеры. Поэтому в этом разделе мы описываем все эти испытания, первые из которых показали, что некоторые из прототипов показали себя лучше, а также мы показываем эксперименты, проведенные на самолетах двух версий нашего окончательного прототипа.
Аэродинамический анализ конструкции самолета является фундаментальной частью его эффективности, поэтому он был использован при разработке последнего прототипа. Анализ профилей NACA 0006, EPPLER EA 8(-1)-006 и Gottingen 443 и выбор наилучшего варианта был опробован на этой модели-прототипе, что позволило улучшить форму последнего выпущенного самолета (прототип 9, финал).
Помимо аэродинамики, производительность трансмиссии также напрямую влияет на эффективность самолета, каждый тип воздушного винта будет обеспечивать уникальные характеристики во время полета, изменяя скорость, тягу и мощность, доступные для каждого процента ускорения, потребления энергетическая матрица и число оборотов в минуту. Чтобы убедиться в этом, мы разработали и использовали испытательный стенд со всеми необходимыми компонентами для детального анализа силового агрегата, в результате чего была получена важная информация для выбора комплекта, использованного в последнем прототипе.
Первые летные эксперименты для поиска подходящей модели прототипа
Как было указано выше, чтобы выбрать правильную модель самолета, мы первоначально выполнили серию экспериментальных полетов с несколькими построенными нами прототипами самолетов с неподвижным крылом. от традиционных самолетов до летающих крыльев. Для каждого построенного прототипа, в общей сложности 9, мы сначала выполняем полет в помещении, чтобы проверить стабильность и другие проблемы, и, как только он работает, они сразу переходят к испытаниям на открытом воздухе. Наши эксперименты проводились в Натале, к северо-востоку от Бразилии, где, как известно, наблюдаются экстремальные ветровые условия: скорость ветра колеблется от 12 км/ч до 22 км/ч, а порывы ветра колеблются от 18 км/ч до 29 км/ч. км/ч, как видно на рис. 21. Наиболее суровые ветровые условия испытываются в Натале с мая по начало сентября. Направление ветра в эти месяцы почти одинаковое, в основном юго-восточное. Таким образом, планирование полетов на несколько недель или месяцев может осуществляться без необходимости повторного планирования из-за повторяющихся (и наихудших) условий в течение периода. Основная цель — проверить работу двигателя/батареи/пропеллера в полете, а также команды управления подъемной силой/устойчивостью и тангажем и качанием. В следующем мы сообщаем тесты и результаты для лучших моделей.
Максимальная и средняя скорость ветра и порывы ветра в 2020 году для Натала, Бразилия.
Увеличить
Прототип 4
Полет с дистанционным управлением по радио проводится в крытом спортзале при слабом ветре. Ручной запуск. Прототип не обладает устойчивостью в полете, демонстрируя слабую поддержку и отсутствие тяги двигателя. Отклик на тангаж ниже ожидаемого, кроме того, движения по продольной оси, производимые элеронами, удовлетворительны в обоих направлениях вращения. Мы не проводили испытаний на рыскание из-за возможности снять руль направления, чтобы уменьшить вес прототипа.
Прототип 5
Этот прототип сконфигурирован со стандартным элевоном, смешанным с помощью радиоуправления. Его начальные условия полета — открытый дистанционно управляемый радиоуправляемый полет, выполняемый в травяном поле при сильном ветре, с ручным запуском. Прототип не показывает устойчивости в полете, поэтому у нас нет убедительных данных по тангажу и поворотам, недостаток моторной тяги, представленный в прототипе 4, с этим становится лучше.
Прототип 6
Prototype 6 имеет размах крыла 0,40 м, что повышает устойчивость и устойчивость, поэтому испытания этого самолета проводятся также для получения информации об эффективности команд управления качки и разворотов. Условия полета аналогичны открытому дистанционно управляемому радиополету, выполняемому в травяном поле при сильном ветре с ручным запуском. Этот прототип демонстрирует превосходную устойчивость в полете, приемлемую подъемную силу при ускорении на уровне 30% мощности, реакцию на тангаж в пределах ожидаемых, отличную реакцию на разворот в обоих направлениях вращения, отличную скороподъемность, поддержание стабильного полета и приемлемую реакцию на команды управления во время маневра.
Прототип 8
На прототипе 8 мы тестируем работу узла двигатель/винт/самолет с большей способностью снижать влияние крутящего момента, а также подъемную силу/устойчивость и команды управления тангажем и качанием с профилем крыла, близким к гладкая плита. Выполняем дистанционно управляемые полеты на открытом воздухе, выполняемые в травяном поле при сильном ветре, с ручным запуском. Этот прототип обладает отличной устойчивостью в полете с ручным стартом с использованием двигателя, но не обладает стабильностью в полете на радиоуправлении с использованием двигателя, несмотря на то, что мы сочли его параметры профиля крыла отличными данными для новой конфигурации самолета.
Прототип 9
Этот прототип продемонстрировал превосходную устойчивость в полете с ручным запуском без использования двигателя. Целью этого ручного запуска является проверка работоспособности узла двигатель/винт/самолет с большей способностью снижать влияние крутящего момента, а также команды управления подъемной силой/устойчивостью и тангажем и качанием с профилем крыла с использованием гладкой пластины с щелевидный край, в округлой атаке. Для этого мы выполняем дистанционно управляемые полеты на открытом воздухе, выполняемые в травяном поле при сильном ветре, с использованием ручного запуска. Он также демонстрирует превосходную устойчивость в радиоуправляемом полете с использованием двигателя, где эффект крутящего момента значительно снижен по сравнению с предыдущим самолетом. Продолжительность его первого полета достигает 25 мин. Продолжительность дополнительных полетов с лучшими погодными условиями достигает 35 минут, а управление самолетом даже в условиях сильного ветра оказалось очень удовлетворительным.
Имитационные тесты аэродинамики
Мы используем 4-миллиметровые плоские пластины без закругленных краев для создания начальной аэродинамики крыла и вертикальных стабилизаторов, без определения профиля. Этот вид материала прост в изготовлении, как ручном, так и промышленном. Следовательно, необходимо получить коэффициенты опоры и проверить возможность образования вихрей на крыле самолета. Для этого мы проводим анализ с использованием моделирования вычислительной гидродинамики (CFD). {\ circ } \) для угол атаки, как видно из таблицы 3. Максимально возможное количество частиц определяется автоматически. Результирующее моделирование потока показано на рис. 22 и 23, для наклонных и задних профилей. 9{\circ}\) углы атаки.
Полноразмерная таблица
Анализ тяги
После определения начальной аэродинамики мы проводим начальные эксперименты с первой версией без автопилота, до определения профилей, для анализа статической тяги, создаваемой силовой передачей, отвечающей за толкание самолета. вперед, создавая необходимую подъемную силу. Для этого мы используем простой прибор с цифровым счетчиком оборотов (модель HCAP0400) и высокоточной цифровой шкалой, как показано на рис. учитывать потери, которые в конечном итоге возникают из-за некоторого вмешательства самолета. Графический анализ этого эксперимента можно увидеть на рис. 25, где мы показываем вычисленное ускорение в 12 точках. Силовой агрегат этой конфигурации достигает 12 720 оборотов в минуту (об/мин), что обеспечивает максимальную статическую тягу 74 g.
Цифровая шкала с высокоточным цифровым счетчиком оборотов HCAP0400, используемая для определения статической тяги.
Изображение полного размера
Рисунок 25График статической тяги при скорости 12 об/мин. Достигается максимальное значение 74 г при частоте вращения 12 720 (об/мин).
Изображение в натуральную величину
Выбор профиля
Поскольку самолет немного больше, мы решили использовать профиль для улучшения аэродинамики. Среди доступных профилей мы выбираем три, здесь, для проверенных, NACA 0006, EPPLER EA 8(-1)-006 и Gottingen 443, показанные на рис. 26, из которых мы должны выбрать лучший. Для этого мы используем Xfoil 6.9.6 для создания данных для графиков характеристических кривых подъемной силы (cl) и сопротивления (cd) в зависимости от изменения наклона (угол атаки \(\alpha\)). Полученные кривые для коэффициентов подъемной силы и сопротивления показаны на рис. 27 и 28. Из анализа этих графиков мы, наконец, выбрали профиль NACA 0006 из-за его большей подъемной силы и более низких коэффициентов сопротивления.
Профили, протестированные для окончательного прототипа.
Изображение полного размера
Рисунок 27Кривые характеристик опор (подъемных) (кл.).
Изображение в натуральную величину
Рис. 28Кривые характеристик сопротивления (cd).
Изображение в полный размер
Выбор винта
Способность эффективно выполнять полет и летно-технические характеристики самолета напрямую связаны с силовой установкой. Таким образом, еще одним важным шагом является выбор гребного винта, поскольку существует большое разнообразие возможностей с точки зрения материала, диаметра, шага и количества лопастей. Для этого мы разработали испытательный стенд, состоящий из ваттметра, тахометра модели HCAP0400, высокоточных цифровых весов и измерителя низкого напряжения для проверки потребления энергии в каждой ячейке батареи, главным образом, чтобы избежать их взрыва во время испытаний. Поскольку за питание силового агрегата и бортовой электроники отвечает один и тот же аккумулятор, мы установили все компоненты самолета на стенде, чтобы имитировать реальное потребление во время полета. Аппарат с установленными компонентами показан на рис. 29..
Стендовая испытательная площадка для определения параметров гребных винтов.
Изображение в полный размер
Мы выбрали 10 различных, наиболее часто используемых гребных винтов, включая такие материалы, как ABS, дерево, полиамид, и использовали разные профили для некоторых из них, как показано в Таблице 4. После испытаний мы рассчитали кривые тяги (рис. 30), ток (рис. 31), доступное напряжение (рис. 32), потребление (рис. 33) и число оборотов в минуту (рис. 34), все в зависимости от ускорения. После этих испытаний мы выбрали GWS, потому что у него лучшая тяга при меньшем потреблении.
Таблица 4 Пропеллеры, выбранные для испытаний. Полноразмерная таблица
Рисунок 30Кривые зависимости тяги, создаваемой гребными винтами, от ускорения.
Изображение полного размера
Рис. 31Кривые зависимости электрического тока, потребляемого каждым винтом, от ускорения.
Изображение полного размера
Рис. 32Кривые напряжения, доступные от аккумулятора при использовании каждого гребного винта в зависимости от ускорения.
Изображение полного размера
Рис. 33Кривые зависимости потребляемой электроэнергии при использовании каждого гребного винта от ускорения.
Изображение полного размера
Рис. 34Кривые числа оборотов в минуту для каждого винта в зависимости от ускорения.
Изображение в натуральную величину
Летные испытания прототипа 9
Первый (управляемый) полет с нашей первой версией мы выполнили в тренажерном зале без стабилизации принципиально, только для настройки поверхностей для управления прямолинейным полетом, а также для проверки позиционирования центр тяжести. Эти полеты выполнялись без использования дистанционного управления, с ручным запуском самолета на 40% от полного возможного ускорения. Мы выяснили, что БПЛА кренится влево, кроме того, мы выровняли рули. В основном это наблюдается при увеличении ускорения, безусловно, за счет действия крутящего момента, создаваемого воздушным винтом самолета. Когда он достигает 60% ускорения, он начинает разворачиваться, в и ось как в прямолинейном режиме полета, так и в кривых влево. Эта проблема усугубляется при более высоком ускорении, что делает невозможным управление летательным аппаратом в какой-то момент, скажем, при 100% ускорении.
Далее мы провели тесты с использованием системы стабилизации, с 25% по шкале производительности при запуске. БПЛА получил поддержку с ускорением примерно в 40%, как и в предыдущих полетах, с уменьшенным эффектом крутящего момента. Однако он представляет собой небольшой тренд влево и по-прежнему выполняет повороты вокруг 9.0083 и ось. Тем не менее, мы могли выполнять полеты, где ускорение составляет 100% с системой стабилизации на 50%. Это устранило проблему эффекта крутящего момента. мы также провели другие тесты, в которых стабилизация составляет 60% и 75%. Однако мы заметили помехи в командах, отправляемых пультом, после примерно 50% стабилизации. На этом внутренние испытания завершены.
Таким образом, мы начинаем тесты на открытом воздухе при прерывистом ветре. Как показано выше на рис. 21, Натал является местом с суровыми ветровыми условиями, с порывами ветра до 30 км/ч. Таким образом запускаем полеты вручную и с 50% стабилизацией. В первом тесте мы могли сохранить контроль над MicroBrosh, как и при тестировании в помещении. Мы получаем подъемную силу, поддерживающую самолет в условиях попутного ветра с ускорением около 40%. При полете против ветра это может быть даже намного меньше, а ускорение снижается примерно до 5%. Из-за наихудших ветровых условий, вызывающих малозаметные изменения направления Микроброша в несколько мгновений полета, самолет теряет устойчивость. Итак, мы исправим это, увеличив скорость стабилизации выше 55%.
После этого мы скорректировали поведение самолета, и он смог без проблем выполнять серию полетов. Собственно, в одном из таких экспериментов для демонстрации условий полета и плавности мы записываем видео, демонстрирующее поведение БПЛА 67 . Кадр, извлеченный из видео, можно увидеть на рис. 35. Продолжительность этого полета составляет около 4 минут, и мы используем здесь конфигурацию с одной батареей, при этом в конце остается достаточно энергии для следующего полета.
Рисунок 35Изображение выполненного экспериментального полета (видео продолжительностью около 4 минут полета доступно на странице https://youtu.be/5nNde87ctaY).
Изображение полного размера
Обсуждения
Как уже было сказано, полевые полеты проводились на открытом воздухе при очень экстремальных условиях ветра, как это видно на видео выше. Продолжительность полета обсуждается ниже. Тем не менее, помимо интересных преимуществ нашего предложения, существуют некоторые ограничения, на которые мы также хотим указать в этом разделе, наряду с продолжительностью полета.
Продолжительность полета
Мы заметили, что вышеприведенная конфигурация полета была дополнена двумя батареями в нашей финальной версии, поэтому мы ожидаем, что время полета увеличится примерно до 30–40 минут. Этот вариант с двумя батареями также позволяет установить камеру, как показано выше на рис. 17). Просто для сравнения: наш меньше и имеет меньший вес, чем современный, но Widon 59 , а с лучшим показателем скорости 62,63 . Тесты на открытом воздухе были остановлены из-за пандемии, однако у нас все еще есть место для улучшений, которые, как мы полагаем, еще больше улучшат эти элементы производительности. Новые разработки в механической системе и использование большего количества батарей дадут лучшие результаты.
Ограничения
Первым аспектом, который был улучшен в последней версии, но который нуждается в испытаниях на открытом воздухе, является автопилот. Он был запущен, и мы запустили его совсем недавно, поэтому он не тестировался снаружи, были проведены только некоторые внутренние тесты. В нашей модели управления используется общий алгоритм, который поставляется с прошивкой и предоставляется программным обеспечением Mission Planner 68 . Все полеты выполнялись дистанционно, однако с использованием программного обеспечения из соображений стабильности. Тем не менее, нам нужно дождаться улучшения условий пандемии Covid-19, чтобы провести больше тестов по этому вопросу. На сегодняшний день строящаяся в настоящее время версия имеет проверенную радиоуправляемую модель самолета со стабилизатором, и все оборудование для поддержки возможностей автономного БПЛА уже установлено.
Теперь у нас есть возможность захвата видео, которое хранится на флэш-карте. Этот элемент также должен быть дополнен возможностью передачи видео, что позволит некоторым пользователям принимать решения в полете в режиме реального времени. Это может быть легко включено в нашу систему с несколькими доступными продуктами. После этого наш БПЛА Micro-Brosh можно использовать для миссий, в которых необходим прямой контроль. Кроме того, включение возможности BVLOS и ее тестирование — еще одна функция, над которой следует поработать. Наконец, мы отмечаем условия ветра в Натале, северо-восток Бразилии, скорость которого варьируется от 10 км/ч до 20 км/ч с порывами от 17 км/ч до 30 км/ч. Наша окончательная версия выдержала нагрузку в этих условиях и показала стабильность, что видно из наших результатов (и подтверждено на видео). Далее следует подчеркнуть такие особенности, как ветропроницаемость и устойчивость при более сильном ветре, которые здесь не наблюдаются, например, вблизи (или внутри) ураганных условий.
Заключительные замечания
Мы предприняли текущие усилия по разработке микро-БЛА под названием Micro-Brosh с массой менее 0,2 кг и размахом крыла 0,3 м, что обеспечивает низкий риск эксплуатации для установок и людей. Наше предложение включает в себя архитектурный проект БПЛА с геометрией типа крыла, показывающий анализ потока с помощью CFD, анализ подъемной силы и тяги, создание прототипа и летные испытания. Мы придумали окончательный прототип в двух версиях, радиоуправляемой и автономной. Наш прототип показал себя работоспособным в экспериментальных испытаниях, включающих несколько полетов в условиях сильного ветра, при которых управление самолетом продемонстрировало плавность. С этой целью у нас есть БПЛА с полностью автономными возможностями полета, способный получать изображения и с основной характеристикой, которую мы назвали BROSH (Basic Risk Operation Self Handled), обеспечивающей низкий риск для людей и объектов.
Наш самолет имеет низкую стоимость производства и обслуживания по сравнению с другими эксплуатируемыми самолетами. Одной из главных особенностей является его небольшой размер, который представляет собой еще одно преимущество. Наш прототип может быть построен менее чем за 500 долларов США за единицу. Для его запуска и управления требуется всего один оператор, в конечном итоге оставляющий его в автономном режиме близко к посадке, что рекомендуется делать на поле с мягкой травой. Мы отмечаем, что микро-БПЛА с описанными здесь функциями интересен в нескольких областях применения, таких как мониторинг в сельском хозяйстве, мониторинг толпы (людей или животных), мониторинг границ, наблюдение и картографирование, а также поиск жертв в результате стихийных бедствий, между прочим.
В ближайшее время мы запустим приложения с автономными летными испытаниями с получением изображения. Затем будет установлен еще один коммерческий комплект камер для передачи данных для интегрированного получения изображений с управлением полетом. Обратите внимание, что это позволяет в конечном итоге изменить запрограммированную траекторию полета, в основном в случае полета за пределами прямой видимости (BVLOS). Еще одна самая первая работа связана с проверкой продолжительности полета (расстояние и время полета). Основываясь на наших расчетах, мы оцениваем, что текущая версия способна летать не менее 30 минут, преодолевая расстояние чуть более 20 км. Мы также планируем изучить и использовать прогностическое управление визуальными моделями 69 , который основан на визуальной информации, предоставляемой текущей камерой для управления, а также тестирует наш алгоритм стохастического нелинейного прогнозирующего управления моделью (SNMPC) для активного отслеживания цели 69,70 . В качестве окончательной идеи будущей работы мы разработаем для него упругую стартовую платформу, что повысит безопасность пилота при запуске. Хотя это может сделать один оператор, запуск второго оператора оказался более безопасным.
Каталожные номера
Дворжак П., Мюллерова Дж., Барталос Т. и Бруна Дж. Беспилотные летательные аппараты для обнаружения и мониторинга чужеродных видов растений. Междунар. Арка Фотограмма. Дистанционный датчик Пространственная инф. науч. XL-1/W4 , 83–90. 10.5194/isprsarchives-XL-1-W4-83-2015 (2015).
Комба, Л., Биглия, А., Рикауда Аймонино, Д. и Гей, П. Неконтролируемое обнаружение виноградников с помощью трехмерной фотограмметрии БПЛА с облаком точек для точного земледелия. Вычисл. Электрон. Агр. 155 , 84–95. https://doi.org/10.1016/j.compag.2018.10.005 (2018 г.).
Артикул Google ученый
Yanliang, Z., Qi, L. & Wei, Z. Проектирование и испытание шестироторного беспилотного летательного аппарата (БПЛА) электростатического опрыскивания для защиты растений. Междунар. Дж. Агрик. биол. англ. 10 , 68–76. https://doi.org/10.25165/j.ijabe.20171006.3460 (2017 г.).
Артикул Google ученый
Радж, Н., Банавар, Р. и Котари, М. Управление ориентацией нового хвостового ситтера: поворотный биплан-квадрокоптер. J. Управление наведением, дин. 43 , 599–607. https://doi.org/10.2514/1.G004697 (2020 г.
 ).
).ОБЪЯВЛЕНИЯ Статья Google ученый
Доши, А. А., Постула, А. Дж., Флетчер, А. и Сингх, С. П. Разработка микро-БПЛА с интегрированным планированием движения для наблюдения за открытым способом. Микропроцесс. микросистема 39 , 829–835. https://doi.org/10.1016/j.micpro.2015.07.008 (2015 г.).
Артикул Google ученый
Лусена, А. Н. и Гонсалвес, Л. М. Бортовая коррекция нестабильности беспилотного летательного аппарата с летающим крылом. В Бразильский симпозиум по робототехнике (SBR) 2020 г. и Латиноамериканский симпозиум по робототехнике 2020 г. (LARS) 2020 г., 1–6. https://doi.org/10.1109/LARS/SBR/WRE51543.2020.
85(2020).XMobots. Аратор 5б-небесный тягач. XMobots Aeroespacial-Drones for Defense and Agriculture, веб-страница, по состоянию на 1 марта 2021 г.
Хасан К., Неваз С. и Ахсан М.С. Проектирование и разработка портативного беспилотника авиационного типа для наблюдения и ликвидации последствий стихийных бедствий. Междунар. Дж. Интелл. Беспилотная система https://doi.org/10.1108/IJIUS-02-2018-0004 (2018 г.).
Артикул Google ученый
Алотаиби, Э. Т., Алкефари, С. С. и Кубаа, А. Лсар: сотрудничество с несколькими БПЛА для поисково-спасательных операций. Доступ IEEE 7 , 55817–55832. https://doi.org/10.1109/ACCESS.2019.2
6 (2019 г.).Артикул Google ученый
Классон, А. и др. Дроны могут быть использованы для спасения жизней при внебольничной остановке сердца из-за утопления. Реанимация 114 , 152–156. https://doi.org/10.1016/j.resuscitation.2017.01.003 (2017).
КАС Статья пабмед Google ученый
Ли, Б. и др. Использование многороторных беспилотных летательных аппаратов для детального мониторинга загрязнения придорожного воздуха. Трансп. Рез. Запись J. Transp. Рез. Совет 2673 , 169–180 (2019).
Артикул Google ученый
Guo, X. et al. Применение дистанционного зондирования БПЛА для переписи популяции крупных диких травоядных на примере района истоков реки Хуанхэ. Дистанционный датчик 10 , 1041 (2018 г.).
ОБЪЯВЛЕНИЯ Статья Google ученый
Икеда Т., Ясуи С., Фуджихара М., Охара К., Ашизава С., Итикава А., Окино А., Оомити Т. и Фукуда Т. Контакты на стене октороторным БПЛА с одним манипулятором глубины резкости для осмотра моста. В 2017 Международная конференция IEEE/RSJ по интеллектуальным роботам и системам (IROS) , vol. 1, 5122–5127 (2017).
Ким, Х., Мокдад, Л. и Бен-Осман, Дж. Разработка систем наблюдения с БПЛА для умного города и обширного океана с различными перспективами. Комм. IEEE. Маг. 56 , 98–104 (2018).
Артикул Google ученый
Санки, Т., Донагер, Дж., Маквей, Дж. и Санки, Дж. Лидар БПЛА и гиперспектральный синтез для мониторинга лесов на юго-западе США. Дистанционный датчик окружающей среды. 195 , 30–43. https://doi.org/10.1016/j.rse.2017.04.007 (2017 г.).
ОБЪЯВЛЕНИЯ Статья Google ученый
Андраде, Ф.А. А., Сторвольд, Р. и Йохансен, Т.А. Автономное наблюдение БПЛА за траекторией движения судна с помощью MPC для обеспечения осведомленности о морской обстановке. Международная конференция по беспилотным авиационным системам (ICUAS) 2017 г. , 633–639 (2017 г.
).Тамм, Ф.-П. и другие. Songbird — инновационный БПЛА, сочетающий в себе преимущества БПЛА с неподвижным крылом и многороторного БПЛА. МСФО междунар. Арка Фотограмма. Дистанционный датчик Пространственная инф. науч. XL-1/W4 , 345–349. https://doi.org/10.5194/isprsarchives-XL-1-W4-345-2015 (2015 г.).
Лусена, А. Н. и Гонсалвес, Л. М. На пути к двойной гибридной системе БПЛА вертикального взлета и посадки. В Латиноамериканский симпозиум по робототехнике 2020 г. (LARS), Бразильский симпозиум по робототехнике 2020 г. (SBR) и Семинар 2020 г. по робототехнике в образовании (WRE) , vol. 1, 1–6. https://doi.org/10.1109/LARS/SBR/WRE51543.2020.
65(2020).
Лусена, А. Н. и Гонсалвес, Л. М. На пути к двойной гибридной системе БПЛА вертикального взлета и посадки. В Латиноамериканский симпозиум по робототехнике 2020 г. (LARS), Бразильский симпозиум по робототехнике 2020 г.
(SBR) и Семинар 2020 г. по робототехнике в образовании (WRE) , 1–6. https://doi.org/10.1109/LARS/SBR/WRE51543.2020.65(2020).
Cetinsoy, E. et al. Проектирование и создание нового четырехместного беспилотника с поворотным крылом. Мехатроника 22 , 723–745. https://doi.org/10.1016/j.mechatronics.2012.03.003 (2012 г.).
Артикул Google ученый
Чиба, Р., Леманович, М., Горол, З. и Кудала, Т. Создание прототипов конструкции, моделирование динамики полета и аэродинамический анализ гибридных беспилотных летательных аппаратов вертикального взлета и посадки. Дж. Доп. трансп. 2018 , 1–15. https://doi.org/10.1155/2018/7040531 (2018 г.).
Артикул Google ученый
Yanguo, S. & Huanjin, W. Проектирование системы управления полетом для небольшого беспилотного самолета с поворотным винтом.
Подбородок. Дж. Аэронавт. 22 , 250–256. https://doi.org/10.1016/S1000-9361(08)60095-3 (2009 г.).Артикул Google ученый
Циаву, О., Питарули, С. и Саутер, Дж. Картографирование с использованием беспилотных летательных аппаратов (БПЛА) в инженерно-геологических изысканиях: рекомендации по получению оптимальных результатов. англ. геол. 232 , 12–21. https://doi.org/10.1016/j.enggeo.2017.11.004 (2018 г.).
Артикул Google ученый
Ооседо, А. и др. Конструкция и ориентация четырехвинтового хвостового беспилотного летательного аппарата вертикального взлета и посадки. Доп. Робот. 26 , 307–326. https://doi.org/10.1163/156855311X614590 (2012 г.).
Артикул Google ученый
Olszanecki Barth, J.
M. et al. БПЛА с фиксированным ветром и переходными режимами полета: подход к управлению на основе моделей или без моделей? Предварительное исследование. В Международная конференция по беспилотным авиационным системам, ICUAS’18 , 1157–1164 (Даллас, Техас, США, 2018 г.).ФИНЭП. Общественный вызов mct/finep — ct-aero — БПЛА 01/2009 (2009). Бразильский финансист исследований и проектов (FINEP).
Clothier, R. & Walker, R. Определение и оценка целей безопасности БПЛА. В Хьюго, С. (ред.) Материалы 21-й Международной конференции по беспилотным летательным аппаратам , 18.1–18.16 (Бристольский университет, Соединенное Королевство, 2006 г.).
Акос Заранди, Н. М., Надь, З. и Кисс, А. Многокамерная система обзора в реальном времени для предупреждения о столкновении БПЛА и навигации. J. Процесс обработки изображений в реальном времени. 12 , 709–724. https://doi.
org/10.1007/s11554-014-0449-3 (2016 г.).Артикул Google ученый
Прадипта Ли, Ф. А. и Го, Т. Х. Управление реконфигурацией с системой предотвращения столкновений для беспилотных летательных аппаратов в трехмерном пространстве. J. Aerospace Eng. 26 , 637–645 (2013).
Артикул Google ученый
Цетин О. и Йилмаз Г. Автономный групповой полет БПЛА в режиме реального времени с предотвращением столкновений и препятствий в неизвестной среде. Дж. Интел. Робот. Сист. 84 , 415–433. https://doi.org/10.1007/s10846-015-0318-8 (2016 г.).
Артикул Google ученый
Панта А., Уоткинс С. и Клотье Р. Динамика парашютной системы малого беспилотного летательного аппарата. Дж. Аэросп. Технол. Управление https://doi.
org/10.5028/jatm.v10.752 (2018 г.).Артикул Google ученый
Аль-Мадани Б., Свирскис М., Нарвидас Г., Маскелюнас Р. и Дамашевичюс Р. Проектирование полностью автоматической парашютной системы дрона с механизмом температурной компенсации для гражданского и военного применения. Дж. Доп. трансп. https://doi.org/10.1155/2018/2964583 (2018).
Артикул Google ученый
Бартковски П. и Залевски Р. Пассивная система безопасности для малых беспилотных летательных аппаратов. Веб-конференция MATEC. 157 , 03001. https://doi.org/10.1051/matecconf/201815703001 (2018).
Артикул Google ученый
Cracknell, A.P. БПЛА: Правила и правоохранительные органы. Междунар. J. Дистанционный датчик 38 , 3054–3067. https://doi.
org/10.1080/01431161.2017.1302115 (2017 г.).Артикул Google ученый
2019/945, C.D.R. E. О беспилотных авиационных системах и эксплуатантах беспилотных авиационных систем в третьих странах. Выкл. Дж. Евр. Union OJ L 152, 11.06.2019 , 1–40 (12 марта 2019 г.).
de Aviação Civil ANAC, A. N. Requisitos Gerais para Aeronaves não Tripuladas de uso Civil. https://www.anac.gov.br/assuntos/legislacao/legislacao-1/rbha-e-rbac/rbac/rbac-e-9{\ circ } \) 419 изд. (2017). RBAC-E 94 EMD 00.
ФАС. Микролетательные аппараты (МАВ) (2009 г.). Федерация американских ученых.
Мюллер, Т. Дж. О рождении микролетательных аппаратов. Междунар. Дж. Микро Эйр Вех. 1 , 1–12. https://doi.org/10.1260/1756-8293.1.1.1 (2009 г.).
Артикул Google ученый
Brandt, S.A. Разработка дизайна и определение размеров малого БПЛА 165–180 (Springer, Dordrecht, 2015).
Google ученый
Лусена, А. Н., Гонсалвеш, Л. М. Г., Мело, Ж. С. П., Джуниор, Р. К. С. Ф. и да Кунья Лейте, Л. Э. Micro veículo aéreo não tripulado — Microvant-brosh. Патент на изобретение (PI), Национальный институт промышленной собственности — INPI. Депозит РСТ, номер: BR 102016020993-5 (2016).
Лусена, А. Н. и Гонсалвес, Л.М. Г. БПЛА Microbrosh: самообслуживаемая платформа для работы с базовыми рисками. В 2021 Международная конференция по беспилотным авиационным системам (ICUAS) , 758–766. https://doi.org/10.1109/ICUAS51884.2021.9476702 (2021 г.
).Кай, Г., Диас, Дж. и Сеневиратне, Л. Обзор малогабаритных беспилотных летательных аппаратов: последние достижения и будущие тенденции развития. Беспилотная система. 02 , 175–199. https://doi.org/10.1142/S2301385014300017 (2014 г.).
Артикул Google ученый
Гиллис, Б. и др. Предварительный проект летательного аппарата Rit Micro Air Vehicle Report (Рочестерский технологический институт, Нью-Йорк, 2005 г.).
Google ученый
Амму, М. С. и Дахалан, М. Н. Воздушный микроавтобус: обзор технологии и исследование конструкции. 1-я Региональная конференция по автомобильной технике и технологиям (Институциональный репозиторий Университета технологий Малайзии, Куала-Лумпур, Малайзия, 2006 г.).
Флайтек. Система БПЛА Ft-altea — Flightec Systems, Inc.
(2006). Веб-страница, по состоянию на 28 февраля 2021 г.XMobots. Nauru 500 c — несравнимый. XMobots Aeroespacial — Drones para Defesa e Agricultura, веб-страница, по состоянию на 1 марта 2021 года. Патент на изобретение (ПИ) ПИ-08-7, Национальный институт промышленной собственности — INPI. Депозит РСТ (2009 г.).
Лусена, А. Н. и Гонсалвес, Л. М. Бортовая коррекция нестабильности беспилотного летательного аппарата с летающим крылом. В Латиноамериканский симпозиум по робототехнике 2020 г. (LARS), Бразильский симпозиум по робототехнике 2020 г. (SBR) и Семинар 2020 г. по робототехнике в образовании (WRE) , 1–6. https://doi.org/10.1109/LARS/SBR/WRE51543.2020.
85 (2020 г.).АэроВиронмент. Система ворона. AeroVironment, Inc. — Решения для беспилотных летательных аппаратов, веб-страница, по состоянию на 1 марта 2021 г.
Локхид.
Пустынный ястреб — увеличивает возможности истребителя. Технический отчет, Lockheed Martin (2021 г.).Гонсалвес, Л. М. Г., Лейте, Л., Силва, Б. М. Ф. и Мело, Дж. Полная система для генерации изображений с глобальным регистром с географической привязкой с БПЛА малого размера. Патент на изобретение (PI) BR-102015032214-3, Национальный институт промышленной собственности — INPI. Депозит РСТ (2015 г.).
XMobots. Arator 5b — о trator dos céus. XMobots Aeroespacial — Drones para Defesa e Agricultura, веб-страница, по состоянию на 1 марта 2021 г.
Саид, А. С. и др. Обзор конструкции платформы, динамического моделирования и управления гибридными БПЛА. В 2015 г. Международная конференция по беспилотным авиационным системам (ICUAS), 806–815 (2015 г.).
Грасмейер, Дж. и Киннон, М. Разработка микролетательного аппарата «Черная вдова», гл. 1, 1–9 (Американский институт аэронавтики и астронавтики, 2001).
https://doi.org/10.2514/6.2001-127.Limited, Беспилотный микролетательный аппарат V. M. Mosquito, Air Force Technology (по состоянию на 5 мая 2021 г.).
Лусена, А. Н. и Гонсалвес, Л.М. Г. БПЛА Microbrosh: самообслуживаемая платформа для операций с минимальным риском. В 2021 Международная конференция по беспилотным авиационным системам (ICUAS) , 758–766. https://doi.org/10.1109/ICUAS51884.2021.9476702(2021).
Ди Лука, М., Минчев, С., Су, Ю., Шоу, Э. и Брейер, К. Биоинспирированное крыло с раздельным потоком обеспечивает устойчивость к турбулентности и аэродинамическую эффективность для миниатюрных дронов. Науч. Робот. https://doi.org/10.1126/scirobotics.aay8533 (2020).
Артикул пабмед Google ученый
Алиото В. и др. Проект микромасштабного развертываемого беспилотного летательного аппарата.
In 1-я региональная конференция по автомобильной инженерии и технологиям (Институциональный репозиторий Universiti Teknologi Malaysia, Куала-Лумпур, Малайзия, 2006 г.).Spoerry, T. & Wong, K. (Project bidule, Design and development of a micro air Vehicle (av) concept (2006)).
Дос Сантос, Л. С., де Андраде, Л. А. и Гама, А. М. Анализ уменьшения поперечного сечения радара истребителя с помощью компьютерного моделирования. Дж. Аэросп. Технол. Управление 6 , 177–182. https://doi.org/10.5028/jatm.v6i2.259 (2014 г.).
Артикул Google ученый
Мартин Л. Создание дрозда. Корпорация Lockheed Martin, веб-страница, по состоянию на 1 марта 2021 г.
Labs, N. Micro-brosh видео на youtube) (2021). Видео предоставлено Natalnet Associate Labs, Федеральный университет Риу-Гранди-ду-Норти, доступ 31 августа 2021 года.
Ardupilot. Команда разработчиков Ardupilot (планировщик миссий). Домашняя страница планировщика миссий — команда разработчиков ArduPilot, веб-страница, по состоянию на 21 июня 2022 г.
Нгуен, Х., Камел, М., Алексис, К. и Сигварт, Р. Модель прогнозирующего управления для микролетательных аппаратов: обзор . 2011 , 11104 (2020).
Насименто, Т. П., Бассо, Г. Ф., Дореа, С. Е. Т. и Гонсалвес, Л. М. Г. Управление движением, управляемое восприятием, на основе стохастических нелинейных прогнозирующих контроллеров модели. IEEE/ASME Trans. Мехатрон. 24 , 1751–1762. https://doi.org/10.1109/TMECH.2019.22 (2019).
Артикул Google ученый
Торрес-Санчес, Дж., Лопес-Гранадос, Ф., Серрано, Н., Аркеро, О. и Пенья, Х.М. Высокопроизводительный трехмерный мониторинг плантаций сельскохозяйственных деревьев с помощью беспилотного летательного аппарата (БПЛА) технологии. PLoS ONE 10 , e0130479 (2015).
Артикул Google ученый
Чанг, К.-К. и др. Исследование смешивания газовых примесей в атмосфере путем отбора проб с воздуха с помощью многороторного беспилотника. Атмос. Окружающая среда. 184 , 254–261. https://doi.org/10.1016/j.atmosenv.2018.04.032 (2018 г.).
ОБЪЯВЛЕНИЯ КАС Статья Google ученый
Рамос, Э. А., Мэлони, Б., Маньяско, М. О. и Рейсс, Д. Афалины и антильские ламантины реагируют на небольшие многороторные беспилотные воздушные системы. Перед. мар. 5 , 316. https://doi.org/10.3389/fmars.2018.00316 (2018).
Артикул Google ученый
Ди Мауро, Б. и др. Влияние минеральной пыли на радиационные свойства снега в европейских Альпах при сочетании наземных, беспилотных и спутниковых наблюдений. Ж. Геофиз. Рез. Атмос. https://doi.org/10.1002/2015JD023287 (2015 г.).
Артикул Google ученый
МакМайкл, Дж. М. и Фрэнсис, М. С. Воздушные микроавтобусы — к новому измерению в полете (Агентство перспективных исследовательских проектов Министерства обороны, 1997).
Скачать ссылки
Гражданские дроны (беспилотные летательные аппараты) | EASA
Регламенты ЕС 2019/947 и 2019/945 определяют основу для безопасной эксплуатации гражданских беспилотников в небе Европы. Они используют подход, основанный на оценке рисков, и поэтому не делают различий между развлекательными и коммерческими видами деятельности гражданских беспилотников. Они учитывают вес и характеристики гражданского беспилотника, а также операцию, для которой он предназначен.
Регламент (ЕС) 2019/947, который применяется с 31 декабря 2020 года во всех государствах-членах ЕС, включая Норвегию и Лихтенштейн (ожидается, что вскоре он станет применимым также в Швейцарии и Исландии), обслуживает большинство типов гражданских операции с дронами и их уровни риска. Он определяет три категории гражданских дронов: «открытая», «специальная» и «сертифицированная».
Категория «открытая» относится к эксплуатации гражданских дронов с низким уровнем риска в , где безопасность обеспечивается при условии, что оператор гражданского дрона соблюдает соответствующие требования для предполагаемой эксплуатации. Эта категория подразделяется на три подкатегории, а именно A1, A2 и A3. Эксплуатационные риски в «открытой» категории считаются низкими, поэтому перед началом полета не требуется эксплуатационного разрешения.
«Специальная» категория охватывает более рискованные полеты гражданских беспилотных летательных аппаратов, когда безопасность обеспечивается оператором беспилотника путем получения эксплуатационного разрешения от национального компетентного органа перед началом эксплуатации. Чтобы получить разрешение на эксплуатацию, оператор дрона должен провести оценку рисков, которая определит требования, необходимые для безопасной эксплуатации гражданских дронов.
В «сертифицированной» категории риск безопасности значительно выше; поэтому для обеспечения безопасности всегда требуется сертификация оператора дрона и его дрона, а также лицензия дистанционного пилота (пилотов).
Управление трафиком дронов будет обеспечиваться через U-пространство: набор услуг, которые будут развернуты в воздушном пространстве, где ожидается более интенсивное движение, например, в городских районах. Регламент U-space устанавливает и согласовывает необходимые требования к пилотируемым и беспилотным летательным аппаратам для безопасной работы в воздушном пространстве U-space, чтобы предотвратить столкновения между воздушными судами и снизить воздушные и наземные риски. Нормативная база U-space обеспечит безопасную эксплуатацию летательных аппаратов во всех областях и для всех видов беспилотных летательных аппаратов. Регламент U-space был принят в апреле 2021 г.
Как обеспечить соответствие требованиям с 31 декабря 2020 года?
Начиная с 31 декабря 2020 года ваш первый шаг , который вам необходимо сделать в качестве оператора дрона, — это зарегистрировать в стране, где вы живете или где у вас есть основное место деятельности.
Пожалуйста, обратитесь к списку ссылок на веб-сайты NAA по дронам по странам в разделе «Дроны — национальные авиационные органы» для получения более подробной информации.
Нужно ли регистрировать дрон?
Что произойдет после регистрации?
Будет ли моя регистрация в качестве оператора признаваться во всей Европе?
Второй шаг заключается в том, чтобы убедиться, что вы осведомлены о правилах, связанных с эксплуатацией гражданских беспилотников, и о рисках, связанных с ними. Оператор дрона и удаленный пилот могут быть двумя разными лицами: оператор дрона — это лицо, которое зарегистрировано и несет ответственность за операцию (обычно это владелец дрона). Удаленный пилот — это человек, который фактически управляет дроном. Оператор дрона также может быть дистанционным пилотом, или он может нанять одного или нескольких дистанционных пилотов. Внешний пилот должен пройти соответствующие обучение для проведения операции.
Часто задаваемые вопросы о требованиях к обучению «открытая» категория
Часто задаваемые вопросы о требованиях к обучению «конкретная» категория
Вам также необходимо убедиться, что у вас есть соответствующее страховое покрытие для вашего дрона. Мы рекомендуем вам проконсультироваться с вашим NAA о требованиях к страхованию дронов. Дополнительные сведения см. в разделе часто задаваемых вопросов о дронах (UAS).
И последнее, но не менее важное: уточните у вашего NAA зоны, в которых полеты дронов запрещены, или зоны, в которых вам необходимо получить разрешение на полет перед входом в них (географические зоны UAS). Сообщайте в NAA о любом происшествии или происшествии, свидетелем или участником которого вы являетесь, когда оно привело к травме человека или когда в нем участвовал самолет с пилотом на борту.
Самый популярный
Гражданские дроны (беспилотные летательные аппараты) Stream
Мнение
Мнение № 04/2022
Хранилище авиационной информации
Уведомления о предлагаемой поправке (NPA)
НПД 2022-06
Внедрение нормативно-правовой базы для эксплуатации дронов — Обеспечение инновационной воздушной мобильности с помощью пилотируемых летательных аппаратов с возможностью вертикального взлета и посадки, IAW БАС, подлежащих сертификации, и CAW тех БАС, которые эксплуатируются в «конкретной» категории
Срок действия для комментариев
Скачиваний
Связанный контент
Беспилотные летательные аппараты
| Ка-137 Ка-175 МиГ Скат Сухой С-62 Ту-123 Ястреб ДБР-1 Як-061 Шмель-1 Альтаир / Альтиус-М |
InformNapalm предложил анализ российских информационных операций вокруг беспилотных боевых летательных аппаратов (БЛА) на фоне хронического отставания России в этих технологиях. Обзор подготовил Евгений Хринев, участник российско-украинской войны, имеющий боевой опыт применения и противодействия БПЛА. «Российские СМИ и отраслевые источники продвигали позицию о непригодности БПЛА для использования в высокоэффективных конфликтах; русские рассматривали их скорее как игрушку для военных операций в странах третьего мира. Это можно было объяснить как консервативным мышлением российского командования, воспитанного на классических концепциях времен холодной войны, и полной неспособностью российского ВПК освоить производство современной микроэлектроники».
В ходе операций на Донбассе в 2022 году Украина «сбила или вынудила приземлиться несколько российских разведывательных БПЛА, таких как «Форпост», «Гранат», «Элерон» и «Орлан». Их проверка показала, что почти все внутренние компоненты этих БПЛА, за исключением планера и парашютов, были изделия иностранного производства гражданского назначения.Например, на Орлане есть GPS-трекер китайского производства, стартер-генератор PTN78020 американского производства от Texas Instruments Inc. , двигатель японского производства от SAITO SEISAKUSHO CO. LTD., система управления полетом оборудование от европейского концерна STMicroelectronics и контроллер телеметрии американского производства от Microchip».
Военная операция в Сирии подтвердила некоторые очевидные недостатки, в первую очередь в области разведки и целеуказания. Например, у России не было дальнобойных беспилотников. Некоторые считают, что общая эффективность российских ВС в Сирии ограничивалась скорее разведывательными возможностями, а не количеством самолетов и мощью вооружения. Очевидно, скорейшее принятие на вооружение беспилотников большой дальности и продолжительности полета, в том числе разведывательно-ударных, совершенствование возможностей воздушной и космической разведки, насыщение ВКС России авиационным высокоточным управляемым оружием, оснащение самолетов контейнерной навигацией, наведение и целеуказание, было очевидно необходимо.
Нынешнее преимущество России в возможностях БАС во многом связано с уроками, извлеченными из прошлого конфликта: войны России с Грузией в 2008 году. Хотя русские легко победили крошечную армию Грузии, грузинские силы широко использовали израильские БАС в роли разведки, демонстрируя свой потенциал российским силам. Вскоре после этого русские реализовали масштабную программу разработки БАС, купив большое количество израильских БАС и инвестировав миллиарды в отечественные программы БАС. Несмотря на позднее начало, российская программа UAS принесла свои плоды в Украине. Представитель армии США заявил в недавнем интервью, что российские беспилотники являются основным фактором, способствующим чрезвычайно точной артиллерийской поддержке повстанцев.
Российские военные подчеркнули необходимость передовых систем разведки после непродолжительного военного конфликта с Грузией в августе 2008 года, когда эффективности российских военных операций серьезно мешало отсутствие надежной разведывательной информации. Конфликт в Южной Осетии показал, что хотя российские войска имели подавляющее преимущество в артиллерийских и бронетанковых войсках, системы разведки и связи оказались ахиллесовой пятой российской армии. В армии РФ до сих пор не внедрены беспилотные разведывательные машины, которые уже приняты на вооружение членами НАТО и Грузией. По разным оценкам, для обеспечения эффективной разведки поля боя российским военным требовалось до 100 БПЛА и не менее 10 систем наведения и управления.
В условиях, когда в небе борется большое количество очень смертоносных противовоздушных систем и острая потребность в полном спектре ISR, Москва и Киев развернули большое количество беспилотных летательных аппаратов для поддержки своих операций в Крыму. Обе стороны используют невооруженные разведывательные дроны для информирования своих сил о передвижениях и позициях противника. Одна из возможностей БАС, в частности, стала существенным фактором: обнаружение целей для артиллерии. Один аналитик назвал нападение БПЛА на пророссийских сепаратистов самым значительным фактором, определяющим разницу в конфликте между в остальном равными силами. Украинские военные не вкладывали значительных средств в возможности БАС; в результате украинские силы прибегли к импровизации новых самодельных беспилотников и покупке всего, что они могут, у союзников и на коммерческом рынке. Напротив, поддерживаемые Россией повстанцы на Украине имеют доступ к передовым технологиям БПЛА. Москва снабжала этих повстанцев как исконно российскими, так и иностранными системами, в том числе из Израиля, Франции и Китая. Кроме того, системы радиоэлектронной борьбы повстанцев намного превосходят украинские, что позволяет повстанцам контролировать электромагнитный спектр и эффективно нейтрализовывать украинские БАС, предоставляя им свободу маневра.
Подтверждено, что российские беспилотники работают в Крыму, включая «Орлан-10», «Гранат-1» и «Тахион». Все эти дроны являются тактическими: они физически малы и летают низко и медленно. Все они имеют модульные пакеты ISR, и все они используются вместе с артиллерийскими частями для повышения точности определения местоположения цели и реагирования на встречный огонь. Силы сепаратистов утверждают, что «Гранат-1» удваивает точность артиллерийских дивизионов, оснащенных ими. Как правило, повстанческие силы оснащают артиллерийские дивизионы тактическими БПЛА, как правило, во взводе целеуказания. Российский тактический БАС может быть выведен на позицию и запущен очень быстро (
- Легкие БПЛА средней дальности. К этому классу БПЛА можно отнести ряд отечественных образцов. Их масса колеблется в пределах 50-100 килограммов. К ним относятся: Т92М «Чибис», ЗАЛА 421-09, Дозор-2, Дозор-4, Пчела-1Т.
- Средние БПЛА . Взлетная масса БПЛА среднего размера составляет от 100 до 300 килограммов. Они предназначены для использования на дальностях 150-1000 километров. В этом классе: М850 Астра, Бином, Ла-225 Комар, Т04, Е22М Берта, Беркут, Иркут-200.
- БПЛА средней массы. Этот класс имеет спектр применения, аналогичный БПЛА предыдущего класса, но имеет несколько большую взлетную массу — от 300 до 500 килограммов. К этому классу относятся: «Колибри», «Дунем», «Дан-Барук», «Аист» («Юлия»), «Дозор-3».
- Тяжелые БПЛА средней дальности. К этому классу относятся БПЛА с полетной массой 500 и более килограммов, предназначенные для использования на средних дальностях 70-300 километров. В тяжелом классе следующие: Ту-243 «Рейс-Д», Ту-300, «Иркут-850», «Нарт» (А-03).
- Тяжелые БПЛА большой продолжительности полета. К достаточно популярной категории беспилотных летательных аппаратов относятся американские БПЛА Predator, Reaper, GlobalHawk, израильские Heron, Heron TP. В России практически нет образцов: Зонд-3М, Зонд-2, Зонд-1, Сухой беспилотные авиационные комплексы (Басс), в составе которых создается роботизированный авиационный комплекс (РАК).
- Беспилотный боевой летательный аппарат (БЛА). В настоящее время в мире ведутся активные работы по созданию перспективных БПЛА, способных нести на борту вооружение и предназначенных для нанесения ударов по наземным и надводным стационарным и подвижным целям в условиях сильного противодействия сил ПВО противника. Они характеризуются дальностью полета около 1500 километров и массой 1500 килограммов. К 2020 году в России в этом классе были представлены два проекта: «Прорыв-У» и «Скат».
К 2012 году две российские компании, компания «Транзас» в Санкт-Петербурге и конструкторское бюро «Сокол» в Казани, занимались разработкой беспилотников класса «Хищник». В 2011 году они выиграли тендер Минобороны России и разрабатывают две машины. Полезная нагрузка первого составляет около одной тонны. Второй близок к американскому Predator и весит около 4,5-5,0 тонн. Естественно, характеристики беспилотников, которые должны удовлетворять требованиям Минобороны, не раскрываются. Однако дизайнеры сделают все возможное, чтобы приблизить их к мировым стандартам. Короче говоря, они будут аналогичны другим беспилотным летательным аппаратам, говорит главный редактор московского журнала «Национальная оборона» Игорь Коротченко.
Главное — выполнять многочасовые полеты и выбирать цели, а также обеспечивать дистанционное управление и целеуказание операторами, находящимися в нескольких тысячах километров от дрона. Следовательно, должна быть система спутниковой связи. Что касается оружия, которое можно было бы использовать для нанесения ударов, то этот вопрос еще не решен, поскольку проект находится на ранней стадии. В России БПЛА будут использовать в первую очередь на Северном Кавказе для наблюдения за обстановкой и ликвидации группировок боевиков.
В последние годы в мире активно развиваются БПЛА, и России придется приложить большие усилия, чтобы ускорить работы в этой области. Цена беспилотного летательного аппарата намного меньше, чем цена пилотируемого самолета. Этот тип самолета может летать несколько десятков часов без остановок. Это невозможно для пилотируемых самолетов. Главное преимущество использования БПЛА в том, что оно не ставит на кон жизнь пилота.
Министр обороны России Сергей Шойгу заявил в июне 2013 года, что разрабатываемые в России для военных беспилотники уступают аналогичным зарубежным образцам. Сообщается, что Россия подписала с Израилем два контракта на создание БПЛА. По первому контракту, подписанному в апреле 2009 г.Израиль поставил две системы Bird Eye 400 (стоимостью 4 миллиона долларов), восемь тактических БПЛА I View MK150 (37 миллионов долларов) и два многоцелевых БПЛА Searcher Mk II (12 миллионов долларов). Второй контракт предусматривал закупку 36 БПЛА на общую сумму 100 млн долларов с поставкой в 2010 году. Однако поставка не была подтверждена Минобороны России.
Российская оборонная компания «Кронштадт» разработала тяжелый беспилотный летательный аппарат (БПЛА) нового поколения для военных целей, сообщил высокопоставленный представитель компании 4 августа 2009 года.. «Кронштадтские инженеры разработали тяжелый БПЛА «Дозор-3» с взлетной массой 600 кг и полезной нагрузкой 100 кг, который может использоваться в качестве ударного самолета», — сообщил член совета директоров компании Виктор Годунов. «Он может нести различные виды разведывательного оборудования и вооружения», — добавил он.
Для сравнения, у американского MQ-9 Reaper максимальная взлетная масса составляет 10 500 фунтов (4 760 кг), а у Global Hawk — 32 250 фунтов (14 628 кг). В 2011 году «Транзас» выиграл тендер Минобороны на разработку двух типов тяжелых беспилотников «Иноходец» и «Альтиус-М» массой 1 и 5 тонн соответственно.
Российские военные планируют закупить в Объединенных Арабских Эмиратах беспилотники, сообщил источник в оборонной промышленности 17 июля 2013 года. Речь идет как минимум о двух моделях United 40 Block 5, разработанных компанией ADCOM Systems, сообщил источник РИА Новости. United 40 — это средневысотный беспилотный летательный аппарат (БПЛА) большой продолжительности полета, предназначенный для проведения боевой оценки, специальных и разведывательных операций, а также ретрансляции связи в режиме, близком к реальному времени. По словам разработчика, машина может нести до 10 ракет класса «воздух-земля» с дальностью доставки 60 километров и летать до 120 часов. Модель United 40 Block 5 была представлена на выставке вооружений IDEX в Абу-Даби в феврале 2013 года, а в марте машина прошла первые летные испытания. Его ориентировочная стоимость составляет 20-30 миллионов долларов. ADCOM Systems, группа фирм со штаб-квартирой в Абу-Даби, специализируется на производстве БПЛА, воздушных целей, радиолокационных систем управления воздушным движением и передовых систем связи.
В декабре 2014 года министр обороны России Сергей Шойгу заявил, что в 2014 году российские военные получили 179 новых БПЛА, что «почти столько же, сколько мы получили за все предыдущие годы».
Новые российские беспилотные летательные аппараты (БПЛА), в том числе беспилотники «Элерон», «Орлан-10», «Форпост» и «Горизонт», должны были быть представлены на первом международном форуме «Армия-2105», запланированном на июнь 2015 года, сообщили в Минобороны России. «В рамках первого Международного форума «Армия-2015» будут представлены комплексы с беспилотными летательными аппаратами как малой, так и средней дальности, а также вертолеты-беспилотники», — говорится в сообщении ведомства.
РСК «МиГ» планировала внести в Минпромторг РФ предложения по облику беспилотного летательного аппарата массой 5 тонн до конца 2015 года. Как сообщал в августе 2015 года Сергей Коротков, который тогда занимал должность генерального директора компании, в рамках заключенного с агентством контракта велись научно-исследовательские и опытно-конструкторские работы по выбору облика такого беспилотника. Позже генеральный директор РСК «МиГ» Илья Тарасенко заявил, что российский перспективный перехватчик ПАК ДП (самолёт дальнего перехвата), который разрабатывается на замену МиГ-31, в будущем может стать беспилотным.
К 2018 году компания «Сухой» создаст новый ударный беспилотник. В настоящее время беспилотник находится в стадии разработки. Новый ударный беспилотник будет весить не менее 20 тонн. По мнению экспертов, у России есть потенциал для создания самых совершенных БПЛА, но есть некоторые проблемы.
Разрабатываемый компанией «Сухой» БПЛА будет базироваться на технических решениях истребителя пятого поколения Т-50. Работы в этой области ведутся несколькими фирмами. Например, специалисты «Сокола» планируют завершить создание БПЛА, вес которого не превышает пяти тонн, к 2015–2016 годам. Компания «Транзас» работает над однотонным беспилотником с 2011 года. Разработчиков торопит министр обороны Сергей Шойгу.
Эксперты считают, что Россия не отстает в этой области. «С точки зрения теории, инженерной и конструкторской мысли мы не на последнем месте в мире», — сказал «Правде.ру» вице-президент Российской академии геополитических проблем Владимир Анохин в октябре 2013 года.
По его словам, «израильтяне, у которых бывший министр обороны Анатолий Сердюков хотел бы закупить беспилотники, используют в своих БПЛА металл». Наши ученые были первыми, по сути, единственными, кто создал БПЛА из композитных материалов, которые позволит сделать их не только более легкими и прочными, но и недосягаемыми для радаров ПВО», — сказал он9.0029
«У нас есть замечательные команды, которые десятилетиями работали над этим, — сказал Владимир Анохин. «Но у нас не хватает рабочих рук. У нас нет производственной базы, у нас нет квалифицированных рабочих, которые могли бы производить в огромных количествах те беспилотники, которые нам сейчас так нужны».
«Действительно, в силу ряда причин развитие беспилотных летательных аппаратов в России несколько запущено. В настоящее время Минобороны России работает над исправлением этой ситуации, инициируя и финансируя программу создания линейки БПЛА разных типов и классов», — заявил в октябре 2013 года российский эксперт в области беспилотных систем Денис Федутинов9. 0029
По его словам, в связи с отсутствием официальных комментариев как со стороны разработчиков, так и военных характеристики разрабатываемых в настоящее время устройств могут обсуждаться лишь предположительно. «Ниша БПЛА класса MALE в настоящее время занята проектами, реализуемыми «Транзасом» и «Соколом». проекты Boeing (Phantom Ray) и Northrop Grumman (X-47B)», — сказал эксперт.
«Кроме того, мы знаем, что прототип ударного беспилотника «Скат», показанный «МиГом» несколько лет назад на одном из авиасалонов МАКС, имел заявленную взлетную массу 10 тонн. «МИГу», так сказать, выполненному в более тяжелой весовой категории, будет предлагать тяжелый беспилотник с возможной взлетной массой около 20 тонн», — сказал Денис Федутинов.
Отвечая на вопрос о назначении таких беспилотников, он сказал, что параллельно с вышеупомянутыми программами ударных беспилотников США создаются для точечных ударов по различным стационарным и движущимся целям как на суше, так и на море в периоды, когда у противника есть работающая система ПВО. было возможно. По словам Владимира Анохина, «это возможность расширить возможности ВВС и авиации в целом… Беспилотники можно отправлять в зоны боевых действий, проводить разведку и проводить регулярные наблюдения, не рискуя человеческими жизнями. Это следующий шаг в развитии авиации, у которого есть будущее».
Российские военные доводят до ума свой собственный тяжелый военный БПЛА. Беспилотник является частью более широкой программы модернизации. Беспилотник уже существует, заявил заместитель министра обороны России Юрий Борисов в январе 2015 года. По словам Борисова, тяжелый БПЛА, создаваемый совместно с Федеральной службой безопасности (ФСБ), будет выполнять целый ряд тактических, оперативных и стратегических задач. никаких дополнительных подробностей, таких как название транспортного средства, не сообщил.
Россия почти догнала своих зарубежных конкурентов в производстве боевых беспилотных летательных аппаратов, заявил Борисов 07 сентября 2016 г. «Буквально несколько лет назад нас критиковали за серьезное отставание в этой области. почти догнал», — сказал Борисов в интервью телеканалу «Россия 24» в кулуарах международного военного форума «Армия-2016». Он добавил, что Россия вышла на уровень ведущих армий мира по производству беспилотников.
Американский аналитик Сэмюэл Бендетт из CNA (Центр военно-морского анализа) считает, что российские разработки боевых беспилотных летательных аппаратов отстают от аналогичных зарубежных разработок, но признает лидерство страны в области радиоэлектронной борьбы, сообщает Breaking Defense в октябре 2017 года. По словам Бендетта, в разрабатывая беспилотные системы, россияне пока отстают «от китайцев, иранцев и турок», как и американцы. Эксперт привел несколько примеров.
По словам Бендетта, разработка первых российских тяжелых беспилотников «Альтаир» отстает от графика и не укладывается в бюджет, в результате чего создание изделия может затянуться. Эксперт отметил, что накануне доклада директора предприятия по созданию боевых беспилотников Казанского ОКБ им. Симонова сняли с занимаемой должности (фактически документы были изъяты в бюро, следователи беседовали с Александром Гомзиным, его куратор).
Беспилотник Orion подозрительно похож на иранский Shahed. Основные российские беспилотники «Форпост» заимствованы из Израиля, где название Searcher выпускается концерном IAI. Специалист отмечает, что дроны, разработанные непосредственно в России, обычно меньше по размерам, чем зарубежные.
Российская авиастроительная корпорация (РАК) «МиГ» ведет работы по созданию ударных и разведывательных беспилотников массой от 1 до 15 тонн, их прототипы появятся в ближайшие годы. Об этом 14 ноября 2017 года сообщила официальный представитель корпорации Анастасия Кравченко на выставке Dubai Airshow 2017. «Это разведывательно-ударные цели, разных классов для разных задач», — сказала она, отвечая на соответствующий вопрос. Кравченко добавил, что прототипы беспилотников будут созданы «в ближайшие годы». Эти устройства будут трех категорий — от одной тонны до пяти, от пяти до десяти и от десяти до пятнадцати.
Собеседник «Интерфакса» сообщил об испытаниях тяжелого беспилотного летательного аппарата «Альтиус-О» массой более 7,5 тонны, разработанного казанским ОКБ имени Симонова. Замгендиректора «Техмаша» (входит в «Ростех») Александр Кочкин сообщил «Интерфаксу» в марте 2018 года, что концерн приступил к разработке боевой нагрузки для беспилотных аппаратов, в качестве которой могут выступать как средства поражения малой дальности, так и авиабомбы.
Генеральный конструктор и вице-президент ОАК по инновациям Сергей Коротков сообщил «Интерфаксу» в декабре 2017 года, что в России ведется работа по созданию беспилотных летательных аппаратов, которые можно объединять в группы и координировать между собой по защищенным каналам связи.
Президент России Владимир Путин заявил в конце 2017 года на коллегии Минобороны России, что при реализации новой государственной программы вооружения особое внимание будет уделяться оснащению войск высокоточным оружием, беспилотными ударными комплексами, а также новейшими системами разведки, связи и радиоэлектронной борьбы.
В октябре 2017 года министр обороны России Сергей Шойгу сообщил о планах по оснащению Вооружённых Сил России ударными беспилотниками. «В ближайшее время на вооружение Вооруженных Сил начнут поступать комплексы с многофункциональными беспилотными летательными аппаратами, способными решать не только разведывательные, но и ударные задачи», — сказал Шойгу.
В настоящее время самым крупным БПЛА, состоящим на вооружении ВКС и Сухопутных войск, является «Аванпост». Беспилотник массой 456 килограммов производится на Уральском заводе гражданской авиации по израильской лицензии. Длина планера 5,85 метра, размах крыла 8,55 метра, продолжительность полета 16 часов.
Сирийская операция выявила нехватку большегрузной техники. Однако Минобороны было обеспокоено отставанием России в области беспилотников задолго до переброски войск в ОАР. В середине и в конце 2000-х были запущены проекты по разработке сразу нескольких перспективных устройств.
В ближайшие годы войска получат БПЛА «Зеница» массой около одной тонны, беспилотный летательный аппарат «Иноходец» массой 1,2 тонны, пятитонную машину «Альтаир» (КБ им. Симонова и фирма «Кронштадт») и 20-тонную ударный беспилотник «Охотник» (детище ОКБ Сухого), выполненный по схеме «летающее крыло».
Как отмечают эксперты, Россия сильно отстала в сфере беспилотной авиации от США, Израиля, ряда западных стран и даже Китая. При этом интенсивные усилия Минобороны и ОПК позволят сократить дистанцию как минимум до 5-10 лет, а полигон в виде сирийской операции поможет опробовать новейшую технику в реальных боевых условиях.
В России разрабатывается несколько типов ударных беспилотных летательных аппаратов: помимо «Ориона» (масса 1 т) и «Карниворов» (масса 150 кг) это разведывательно-ударный беспилотник массой до 5 т «Альтаир» и тяжелый беспилотник шестого поколения (заявлялась масса до 20 тонн). Также на Параде Победы 9 мая 2018 года демонстрировались ударные беспилотники «Корсар» и «Катран».
К 2020 году ВВС России должны получить на вооружение первые боевые беспилотные летательные аппараты (БЛА). По состоянию на июнь 2014 года ожидалось, что государственные или полигонные испытания новых БЛА могут начаться в 2017 году. По словам заместителя министра обороны Юрия Борисова , научно-исследовательские и опытно-конструкторские работы по этому проекту почти завершены. Дроны-истребители способны решать стратегические задачи, поскольку их трудно обнаружить и они обладают большей боевой устойчивостью, чем пилотируемые самолеты.
Москва была безоговорочным лидером в этой области: только в 1980-е годы она произвела 950 разведывательных БПЛА Ту-143. Однако затем Минобороны свернуло производство беспилотников, так как ни денег, ни идеологических причин для ввода в эксплуатацию этого типа самолетов у него уже не было. Именно американцы подтолкнули российских военных к возрождению программы. Успешные операции США с применением БПЛА в Афганистане и Пакистане показали, что ни одна война будущего не может вестись без дронов. Еще одним импульсом, стоящим за стремлением России разработать собственные беспилотные летательные аппараты, стала война 2008 года в Южной Осетии. Когда Минобороны России увидело, что грузинская сторона использует израильские беспилотники, оно пришло к выводу, что этот тип самолетов необходим для нового века.
Объявлен первый тендер на разработку БПЛА. Его получили несколько конструкторских бюро. Конструкторское бюро Яковлева представило проекты боевого беспилотного летательного аппарата под названием «Скад». По своему внешнему виду и техническим характеристикам он был очень похож на американскую модель Х-47. Его основными характеристиками были объявлены следующие: максимальная взлетная масса 10 тонн; дальность 4000 км; скорость полета не менее 800 км в час. Он будет способен нести две ракеты класса «воздух-поверхность/противорадиолокационные» или две умные бомбы общим весом не более одной тонны.
Вторым победителем стало ОКБ Сухого с проектом Х-40. Доступной информации о нем очень мало. Его конструкция, вероятно, «унаследует» характеристики знаменитых истребителей Су и станет прототипом истребителя шестого поколения. На это указал заместитель министра обороны Юрий Борисов, намекнув, что будущий ударный самолет будет создаваться на основе технологий, используемых в истребителе пятого поколения Т-50.
В середине февраля 2014 года министр обороны России Сергей Шойгу заявил, что министерство намерено потратить до 2020 года 320 миллиардов рублей (около 8,8 миллиардов долларов) на программу оснащения российских вооруженных сил беспилотными летательными аппаратами. На покупку каких именно БПЛА пойдут эти деньги, пока неясно. Все последние выставки боевых беспилотных летательных аппаратов для Минобороны состояли из двух частей. Первый – открытый, в нем представлены тактические и полустратегические самолеты, которые зачастую производятся по лицензии или используют импортную комплектующую базу. Обычно это БПЛА двойного назначения.
Второй — закрытый, где чиновники министерства смогли увидеть стратегические самолеты. На одной из таких выставок, по словам источника, близкого к Минобороны, Шойгу показали стратегический самолет на солнечных батареях. Беспилотник был настолько большим, что его не смогли провезти на выставку и показали министру обороны по видеосвязи. Эксперты отмечают, что тот факт, что некоторые выставки проходят за закрытыми дверями, свидетельствует о том, что в России есть прототипы, которые лучше не афишировать. Тем более, что главная сила дрона не в его аэродинамических характеристиках, а в интеллектуальном наполнении программного обеспечения, используемого для его управления.
12 мая 2021 года «Известия» сообщили, что Минобороны приняло решение о поэтапном перевооружении разведывательных эскадрилий Воздушно-космических сил с самолетов на беспилотные летательные аппараты (БПЛА). Теперь эти подразделения оснащены специально модернизированными Су-24МР, созданными на базе знаменитого советского фронтового бомбардировщика. По мнению экспертов, заменить «Сухого» смогут БПЛА «Орион» и перспективный БПЛА «Альтиус», способные преодолевать многие тысячи километров. При этом полностью отказываться от пилотируемых самолетов-разведчиков оборонное ведомство не собирается. В случае необходимости эти функции будут выполнять истребители-бомбардировщики Су-34, модернизированные по проекту «Сыч». Эти машины могут использовать унифицированные подвесные разведывательные контейнеры. Их существует три варианта: оптоэлектронный, радиотехнический и радиолокационный.
НОВОСТИ ПИСЬМО |
| Присоединяйтесь к списку рассылки GlobalSecurity.org |
| Введите свой адрес электронной почты |
БПЛА Predator RQ-1 / MQ-1 / MQ-9 Reaper, Соединенные Штаты Америки
Произведенный General Atomics Aeronautical Systems, MQ-9 Reaper представляет собой дистанционно управляемый БПЛА, способный выполнять полеты в автономном режиме. Фото: подполковник Лесли Пратт/Википедия.
Многоцелевой БПЛА MQ-1 Predator оснащен ракетами AGM-114 Hellfire для вооруженной разведки. Фото: Кредит: подполковник Лесли Пратт/Википедия.
RQ-1 Predator был обозначен как MQ-1 в 2002 году. Фото: Музей ВВС США/Википедия.
Королевские ВВС Нидерландов (RNLAF) получили три самолета MQ-9A Block 5 в апреле 2022 года. Фото: General Atomics.
GA-ASI заключила контракт на поставку восьми самолетов MQ-9A повышенной дальности (ER) для Корпуса морской пехоты США (USMC). Кредит:
MQ-1, ранее обозначавшийся как RQ-1 Predator, представляет собой многоцелевой турбовинтовой многоцелевой беспилотный авиационный комплекс (БАС) с турбовинтовым двигателем средней высоты. Он был произведен General Atomics Aeronautical Systems (GA-ASI), авиационной компанией, базирующейся в США.
В январе 1994 года с GA-ASI был заключен контракт на выполнение программы среднего выносливого Predator Tier II. Система «Хищник» впервые поднялась в воздух в 1994 г., а производство началось в августе 1997 г.
RQ-1 был разработан для разведывательных и разведывательных миссий. Обозначение было изменено на MQ-1 в 2002 г.
Вооруженный ракетами AGM-114 Hellfire, MQ-1 представляет собой многоцелевую платформу, используемую для вооруженной разведки и противодействия.
БАС может передавать изображения наблюдения с радара с синтезированной апертурой, видеокамер и инфракрасного датчика переднего обзора (FLIR) в режиме реального времени как солдату на передовой, так и оперативному командиру, или по всему миру по каналам спутниковой связи.
GA-ASI получила контракт от ВМС США на поставку восьми БПЛА увеличенной дальности MQ-9A для Корпуса морской пехоты США (USMC) в мае 2022 года. Ожидается, что самолет будет доставлен в конце 2023 года9.0029
Компоненты системы БПЛА Predator
Типичная конфигурация системы Predator включает четыре самолета, одну наземную систему управления и один терминал распределения данных Trojan Spirit II. Воздушный аппарат Predator имеет длину 8,2 м (27 футов) и размах крыльев 14,9 м (49 футов). Система работает на высоте 7620 м (25 000 футов) и на расстоянии 740,8 км (400 морских миль).
Автономность полета более 40 часов, а крейсерская скорость более 129,6 км/ч (70 узлов). Самолет оснащен радиорелейными линиями сверхвысокой частоты (УВЧ) и очень высокой частоты (ОВЧ), линией передачи данных прямой видимости С-диапазона с дальностью 277,8 км (150 морских миль), а также УВЧ и Каналы спутниковой передачи данных Ku-диапазона. Корпус морской пехоты (USMC) в мае 2022 года. Ожидается, что самолет будет доставлен в конце 2023 года.
Работа БПЛА Predator
Хищник следует обычной последовательности запуска с полуподготовленной поверхности под контролем прямой видимости. Взлетно-посадочная длина обычно составляет 609,6 м (2000 футов). Миссией можно управлять через линии передачи данных или через спутниковые каналы Ku-диапазона для получения непрерывного видео.
Видеосигналы, принимаемые наземной станцией управления, передаются на фургон Trojan Spirit для распространения информации по всему миру или непосредственно оперативным пользователям через коммерческую глобальную систему вещания. Пользователи команд могут в режиме реального времени ставить задачи оператору полезной нагрузки для изображений или видео по запросу.
Predator B Skywarrior
В мае 1998 года General Atomics, материнская компания GA-ASI, получила контракт на модернизацию Block 1 для расширения возможностей системы Predator. Модернизация системы включала разработку усовершенствованной системы помощи на станции (ROS), которая обеспечивает непрерывный охват интересующих областей без потери времени нахождения на станции, защищенную голосовую ретрансляцию управления воздушным движением, настройку спутников в диапазоне Ku и реализацию система поддержки задач ВВС (AFMSS).
Модернизация также коснулась более мощного двигателя с турбонаддувом и систем защиты от обледенения крыльев, чтобы обеспечить круглогодичную эксплуатацию.
В августе 2005 года версия Predator B под названием Sky Warrior была выбрана для четырехлетнего этапа разработки и демонстрации системы (SDD) программы расширенного радиуса действия / многоцелевого (ER / MP) БПЛА армии США, включающей 11 Sky Системы Warrior, каждая с 12 летательными аппаратами и пятью наземными станциями управления.
Первоначальная работоспособность достигнута в 2009 г., в то время как два БПЛА Block 0 Sky Warrior были развернуты в Ираке в апреле 2008 года. GA-ASI получила финансирование в размере 195,5 млн долларов США от армии США на низкотемпературное начальное производство беспилотного летательного аппарата Sky Warrior в июле 2010 года.
Департамент США Министерства внутренней безопасности / таможенной и пограничной охраны (DHS / CBP) заказали две системы Predator B для наблюдения за юго-западной границей США в августе 2005 г.
Первая была доставлена в конце 2005 г., вторая — в сентябре 2006 г. Два в октябре 2006 г. было заказано еще несколько систем для наблюдения за операциями на границе с Канадой.
БПЛА MQ-9 Reaper Hunter/Killer
ВВС США заключили дополнительный контракт на проектирование и разработку системы (SDD) MQ-9 Reaper Hunter/Killer в марте 2005 г. Они разместили заказы на 21 MQ-9 и восемь Первоначально самолеты были поставлены ВВС США.
Первая эскадрилья ВВС США MQ-9, 42-я штурмовая эскадрилья, была сформирована в марте 2007 года на базе авиабазы Крич в Неваде.
ВВС США впервые отправили MQ-9 Reaper в Афганистан в октябре 2007 года для нанесения точечных авиаударов. MQ-9Reaper выполнил свою первую боевую миссию в Ираке в июле 2008 года.
MQ-9 Reaper имеет эксплуатационный потолок 15 240 м (50 000 футов), максимальную внутреннюю полезную нагрузку 362,8 кг (800 фунтов) и внешнюю полезную нагрузку более 1360,7 кг (3000 фунтов). ). Он может нести до четырех противотанковых ракет Hellfire II и две бомбы с лазерным наведением (GBU-12 или EGBU-12) и 226,8 кг (500 фунтов) GBU-38 JDAM (совместный боеприпас прямой атаки).
В мае 2008 г. самолет ВВС США «Рипер» успешно сбросил четыре бомбы Raytheon GBU-49 Enhanced Paveway II массой 226,8 кг (500 фунтов) с лазерным наведением и GPS-наведением.
Полезная нагрузка датчика MQ-9 может включать в себя РЛС General Atomics Lynx (радар с синтезированной апертурой). Lynx также использует технологию индикатора наземных движущихся целей.
Компания GA-ASI разработала и продемонстрировала в июне 2020 года три усовершенствования расширенных возможностей автоматического взлета и посадки (ATLC) для платформы MQ-9A. разведывательные миссии (ISR) в поддержку операций НАТО в январе 2021 г.
MQ-9, оснащенный электронной системой поддержки Reaper Defense (RDESS), впервые был запущен 26-й оружейной эскадрильей (WPS) ВВС США в апреле 2021 года. RDESS, представляющая собой средство пассивной электронной поддержки широкого спектра ( ESM) полезная нагрузка, может улучшить возможности летательного аппарата за счет сбора и геолокации соответствующих сигналов с удаленного расстояния.
Информация о полезной нагрузке MQ-1 / 9 Predator
Полезная нагрузка для наблюдения и разведки составляет 204 кг (450 фунтов), машина оснащена электронно-оптическими и инфракрасными камерами, а также радаром с синтезированной апертурой. Двухцветный телевизор DLTV оснащен переменным зумом и 955-мм Spotter, а FLIR с высоким разрешением имеет шесть полей зрения в диапазоне от 19 мм до 560 мм.
Многоспектральная система наведения Raytheon (MTS-A) установлена на MQ-1/9 Predator. MTS-A обеспечивает изображение в реальном времени, выбираемое между инфракрасным и дневным телевидением, а также возможность лазерного целеуказания. MQ-1 может использовать две противотанковые ракеты Hellfire с лазерным наведением вместе с MTS.
Радар Northrop Grumman TESAR с синтезированной апертурой, обеспечивающий всепогодное наблюдение, установлен на MQ-1 и имеет разрешение 0,30 м (1 фут). Другие варианты полезной нагрузки, которые могут быть выбраны в соответствии с требованиями миссии, включают лазерный целеуказатель и дальномер, электронную поддержку и средства противодействия, а также индикатор движущихся целей (MTI).
В 2010 году ВВС США оборудовали ряд MQ-1 и MQ-9 Predator версией бортовой радиотехнической разведки (ASIP) Northrop Grumman. Northrop Grumman получила контракт на разработку и летные испытания системы на MQ-1 в апреле 2008 г. ASIP также был испытан на разведывательном самолете U-2 и установлен на RQ-4 Global Hawk.
Конфигурация MQ-9A Block 5
MQ-9A Block 5 может непрерывно работать в течение 27 часов на высоте до 15 240 м (50 000 футов) и на скорости примерно 444,48 км/ч (240 узлов). Он может нести полезную нагрузку весом до 1746 кг (3850 фунтов), включая 136 кг (300 фунтов) внешних магазинов.
Конфигурация Block 5 предназначена для обеспечения более длительного срока службы и оснащена полноэкранным видео и радаром с синтезированной апертурой/морским радаром/индикатором движущихся целей для обеспечения возможности непрерывного наблюдения. Он оснащен последними версиями многорежимного радара GA-ASI Lynx ® и электрооптическими датчиками Raytheon. Кроме того, вариант Block 5 включает в себя отказоустойчивую систему управления полетом и архитектуру системы авионики с тройным резервированием.
GA-ASI объявила об интеграции многорежимного радара Leonardo Seaspray 7500E V2 в MQ-9.БПЛА Block 5 и первый полет в апреле 2022 года.
Наземная станция управления
Наземная станция управления БПЛА встроена в один трейлер длиной 9,1 м (30 футов), содержащий пульты управления пилотом и оператором полезной нагрузки, три пульта управления данными Boeing и планирования миссии. пульты и две рабочие станции РЛС с синтезированной апертурой вместе со спутниковыми и наземными терминалами данных прямой видимости.
Станция может отправлять данные изображений по стационарной линии оперативным пользователям или в систему распространения данных Trojan Spirit, которая оснащена тарелкой 5,5 м для наземного терминала данных Ku-диапазона и тарелкой 2,4 м для распространения данных.
Участвующие подрядчики
General Atomics является генеральным подрядчиком БПЛА Predator.
Основными субподрядчиками проекта являются Versatron / Wescam для электрооптического подвеса Skyball Gimbal, Northrop Grumman для радара с синтезированной апертурой, L3 Communications, которая была переименована в L3 Technologies и объединилась с Harris для создания L3Harris Technologies для широкополосной спутниковой связи. link и Boeing для разведывательной рабочей станции и системы планирования миссий.
Заказы и поставки MQ-9 Reaper
GA-ASI имеет экспортные лицензии на продажу невооруженной экспортной версии беспилотника Predator в Саудовскую Аравию, Египет, ОАЭ и Марокко.
Великобритания запросила военную продажу за границу (FMS) двух систем MQ-9 Reaper с Lynx SAR, многоспектральными системами наведения и одной наземной станцией в сентябре 2006 г. Поставки начались в середине 2007 г. и Королевские ВВС (RAF) развернула систему в Афганистане в ноябре 2007 г. В январе 2008 г. Великобритания запросила продажу десяти дополнительных MQ-9.системы.
В июне 2015 года Итальянское управление авиационных вооружений и летной годности (DAAA) выбрало CAE для разработки модернизации учебно-тренировочного самолета Predator UAS для самолетов Predator A и Predator B/MQ-9, разработанных для ВВС Италии. Новый учебно-тренировочный самолет был введен в состав ВВС в феврале 2018 года. GA-ASI получила контракт от ВВС Италии на обновление среднего жизненного цикла своего парка MQ-9, модернизировав их до конфигурации Block 5.
GA-ASI получила контракт на 30,5 млн долларов на модернизацию MQ-9 ВВС Италии (IAF).Беспилотники A Predator B от стандарта Block 1 до Block 5, сентябрь 2021 г.
Компания получила контракт на поставку систем MQ-9 для Королевских ВВС Нидерландов (RNLAF) в июле 2018 г.
Испания разместила заказ на два БПЛА MQ-9 в апреле 2019 года. Первая система была доставлена ВВС Испании в декабре 2019 года. Последние два БПЛА MQ-9A Block 5 Reapers и наземная станция управления (GCS) были доставлены ВВС Испании в ноябре 2020 года. часть соглашения FMS на поставку четырех самолетов и трех наземных станций управления.
GA-ASI был выбран Министерством обороны Австралии (DoD) для поставки MALE RPA на конкурсе в ноябре 2018 года. Австралия предпочла MQ-9B SkyGuardian MQ-9 Reaper из-за требований MALE RPA в Ноябрь 2019 г. Австралия отменила планы закупок самолетов MQ-9B в марте 2022 г. Причины отмены, однако, не разглашаются.
Компания получила контракт на Agile Reaper Enterprise Solution (ARES) с максимальной стоимостью 7,4 млрд долларов от MQ-9 Центра управления жизненным циклом ВВС США.Офис программы в сентябре 2020 года. Пятилетний контракт направлен на сокращение времени доставки MQ-9 в оперативные части и позволяет закупать до 36 самолетов в год.
Государственный департамент США удовлетворил запрос ОАЭ на закупку 18 беспилотников MQ-9 Reaper в ноябре 2020 года.
В июле 2021 года компания выкатила первый РЗА MQ-9A и наземную станцию управления для Королевских ВВС Нидерландов (RNLAF). ). Самолет прошел приемочные испытания. GA-ASI получила контракт на поставку четырех MQ-9.Самолет Block 5 и четыре наземные станции управления в Нидерланды по соглашению FMS с США. Контракт также включает поставку сопутствующего вспомогательного оборудования.
Первые три самолета MQ-9A Block 5 и две мобильные наземные станции управления были доставлены RNLAF в апреле 2022 года.
Правительство США одобрило последующую поддержку французского самолета MQ-9 в феврале 2022 года.
Predator Операции и развертывание БПЛА
Хищники находились на вооружении 11-й и 15-й разведывательных эскадрилий ВВС США (ВВС США). Всего ВВС США было доставлено 268 самолетов Predator, последняя поставка которых была завершена в марте 2011 года. ВВС Италии заказали шесть беспилотных летательных аппаратов (БПЛА) Predator. Итальянские беспилотники были развернуты в Ираке в январе 2005 г. В 2015 г. компания GA-ASI поставила два последних БПЛА итальянским ВВС9.0029
БПЛА Predator использовались в Боснии для поддержки операций НАТО, ООН и США. Беспилотные системы также были развернуты в рамках операций «Несокрушимая свобода» в Афганистане и «Иракская свобода». MQ-1 Predator достиг начальной эксплуатационной готовности (IOC) в феврале 2005 г.
В феврале 2001 г. ракета с лазерным наведением Hellfire-C была успешно запущена с летательного аппарата Predator в ходе летных испытаний на авиабазе Неллис, штат Невада. БПЛА Predator был использован для сброса ракеты Hellfire в Йемене в ноябре 2002 года, уничтожив гражданский автомобиль, перевозивший подозреваемых террористов. В августе 2002 года суббоеприпас Northrop Grumman Bat был успешно сброшен, и с БПЛА Predator был запущен мини-БПЛА FINDER.
В сентябре 2007 г. ВВС США заказали 36 дополнительных самолетов MQ-1B Predator, оснащенных комплектами для установки ракет Hellfire. В марте 2011 г. ВВС США приняли последний самолет MQ-1 Predator.
В 2011 г. GA-ASI подписала два отдельных соглашения с CAE и RUAG Aerospace Services, принадлежащая RUAG International, поставит БАС Predator B в Канаду и Федеративную Республику Германия соответственно. RUAG International, дочерняя компания RUAG International Holding, продала RUAG Aerospace Services компании General Atomics Europe в марте 2021 года9.0029
GA-ASI подписала меморандум о взаимопонимании с Fokker Technologies, входящей в состав GKN Aerospace, в июне 2013 года, чтобы предложить RPA Predator B для поддержки возможностей правительства Нидерландов на средних высотах и большой продолжительности полета (MALE). Он также сотрудничал с испанской инженерной компанией SENER, чтобы предоставить RPA Predator B правительству Испании в марте 2015 года. . Предсерийный радар должного учета (DRR) был испытан на борту Predator B RPA в феврале 2015 г.
В августе 2015 года ВВС США приняли на вооружение MQ-9 Reaper повышенной дальности (Reaper ER). Reaper ER обеспечивает повышенную дальность и выносливость. Он поставляется с возможностью модернизации в полевых условиях, такими как два топливных бака на крыльях. Он оснащен системой впрыска спирта/воды и четырехлопастным винтом для увеличения тяги и взлетных характеристик. Тяжелая система шасси с продольными рычагами также встроена для безопасных наземных операций.
GA-ASI поставила Министерству обороны Франции три системы Predator B/MQ-9 Reaper в мае 2015 года. Франция разместила у GA-ASI заказ на сумму 123 млн долларов на 3-ю / 4-ю системы MQ-9.Программа Block 5 в августе 2018 г.
Флот БПЛА Predator был выведен из состава ВВС США в марте 2018 г. MQ-9 Reaper служит основным дистанционно-пилотируемым самолетом ВВС США для наступательных операций с 2018 г.
Связанные проекты
Темы в этой статье :
Сертификация типа некоторых беспилотных авиационных систем
Начало Преамбула Начать печать страницы 58251
Федеральное авиационное управление, DOT.
Уведомление о правилах.
Федеральное авиационное управление объявляет о своей политике сертификации типа некоторых беспилотных авиационных систем как особого класса самолетов.
Эта политика вступает в силу 18 сентября 2020 г.
Начать дополнительную информацию
Эндрю Гайон, Отдел программ и процедур, AIR-694, Отдел стандартов для малых самолетов, Отдел политики и инноваций, Служба сертификации самолетов, Федеральное авиационное управление, 901 Locust Street, Room 301, Kansas City, MO 64106, телефон (816) 329-4141, факс (816) 329-4090.
Конец дополнительной информации Конец преамбулы Начать дополнительную информацию
Исходная информация
В 2012 г. Конгресс принял Закон о модернизации и реформировании FAA от 2012 г. (Pub. L. 112-95). Раздел 332 публичного закона 112-95 (кодированный в 49 USC 44802) поручил FAA разработать комплексный план безопасного ускорения интеграции беспилотных авиационных систем (UAS) в национальную систему воздушного пространства (NAS). В рамках этого плана FAA издало окончательное правило «Эксплуатация и сертификация малых беспилотных авиационных систем» (81 FR 42064, 28 июня 2016 г.), которое добавило часть 107 14 CFR к правилам FAA в разделе 14 Свода федеральных правил. (14 CFR).
Часть 107 устанавливает правила эксплуатации малых БАС [1] которые не требуют сертификации летной годности FAA. Согласно ч. 107 операции над лицами не допускаются, [2] ночью, как правило, на высоте более 400 футов над уровнем земли или за пределами прямой видимости, без разрешения FAA. БПЛА весом 55 фунтов или более, а также небольшие БПЛА, работающие за пределами ограничений, налагаемых частью 107, должны получить сертификат летной годности, отказ или освобождение в зависимости от ситуации.
FAA устанавливает критерии летной годности и выдает сертификаты типа для обеспечения безопасной эксплуатации воздушных судов в соответствии с 49 U.S.C. 44701(a) и 44704. Раздел 44704 требует, чтобы Администратор обнаружил, что воздушное судно, авиационный двигатель, воздушный винт или устройство должным образом спроектированы и изготовлены, работают должным образом и соответствуют правилам и минимальным стандартам, предписанным в соответствии с разделом 44701(a), прежде чем выдавать разрешение. типовой сертификат на него.
14 CFR часть 21 содержит процедурные требования FAA по летной годности и сертификации типа. Когда FAA обнародовало часть 21 в рамках своей рекодификации для объединения и упорядочения Правил гражданской авиации, первоначально от заявителей на получение сертификата типа требовалось показать, что продукт соответствует существующим стандартам летной годности (29).FR 14562, 24 октября 1964 г.). Существующие стандарты летной годности для самолетов и другой продукции, выпущенные как отдельная часть правил FAA, включают: самолеты нормальной категории в соответствии с 14 CFR, часть 23, самолеты транспортной категории в соответствии с 14 CFR, часть 25, винтокрылые машины нормальной категории в соответствии с 14 CFR, часть 27, транспортная категория. винтокрылые аппараты в соответствии с 14 CFR, часть 29, пилотируемые неуправляемые аэростаты в соответствии с 14 CFR, часть 31, авиационные двигатели в соответствии с 14 CFR, часть 33, и воздушные винты в соответствии с 14 CFR, часть 35. для специальных классов воздушных судов (52 FR 8040, 13 марта 1987). В окончательном правиле (поправка 21-60) FAA пояснило, что намерено включить в категорию специального класса частично те самолеты, которые имеют право на получение стандартного сертификата летной годности, но для которых не существует стандартов сертификации из-за их уникальности. , новые или необычные конструктивные особенности. FAA далее заявило, что «решение о выдаче сертификата типа самолета либо в категории самолетов специального класса, либо в категории . . . FAR полностью зависит от уникальных, новых и/или необычных конструктивных особенностей самолета». (52 ФР 8041).
В частности, окончательное правило (поправка 21-60) пересмотрело § 21.17(b) и включило процедуру сертификации для специальных классов воздушных судов. Для специальных классов воздушных судов, для которых стандарты летной годности не были выпущены, применимыми требованиями к летной годности будут те части существующих стандартов, которые содержатся в частях 23, 25, 27, 29, 31, 33 и 35, признанные FAA недействительными. соответствующие данному воздушному судну и применимые к конструкции конкретного типа, или такие критерии летной годности, которые FAA может счесть обеспечивающими эквивалентный уровень безопасности для этих частей.
«Беспилотный летательный аппарат» — это летательный аппарат, управляемый без возможности прямого вмешательства человека изнутри или на борту летательного аппарата. См. 49 U.S. 44801(11); 14 CFR 1.1. Беспилотные летательные аппараты включают в себя все классы самолетов, винтокрылых и моторных летательных аппаратов. Многие элементы БАС, необходимые для безопасной эксплуатации, являются частью системы БАС, но не являются постоянными элементами беспилотного летательного аппарата. Например, вместо традиционного шасси с колесами и тормозами многие БАС имеют систему запуска и подъема. Кроме того, поскольку пилот не находится внутри самолета, возможны уникальные конфигурации и применения планера, силовых установок, топлива и материалов, что может привести к летным характеристикам, отличным от характеристик обычного самолета. Эти функции, характерные для UAS, являются очень уникальными, новыми и/или необычными функциями, для которых была разработана специальная категория класса.
Уведомление о политике и запрос комментариев относительно сертификации типа некоторых БАС были опубликованы в Федеральном реестре 3 февраля 2020 г. (85 FR 5905). Период общественного обсуждения уведомления завершился 4 марта 2020 г. В уведомлении предлагалось, чтобы некоторые БПЛА без пассажиров на борту могли быть сертифицированы как самолеты специального класса в соответствии с § 21.17(b). В уведомлении также предлагалось, чтобы для конструкций самолетов и вертолетов, когда это уместно, FAA по-прежнему могло выдавать сертификаты типа в соответствии с § 21. 17(a).
Обсуждение комментариев
FAA получило 66 комментариев. Большинство комментаторов были отдельными операторами БАС. Среди остальных комментаторов были производители БАС, народ чокто из Оклахомы (CNO), Китайская Народная Республика (КНР) и такие организации, как Ассоциация аэрокосмической промышленности (AIA), Ассоциация владельцев и пилотов самолетов (AOPA), Airlines for America. (A4A), Ассоциация линейных пилотов (ALPA), Международная ассоциация систем беспилотных летательных аппаратов (AUVSI), Альянс коммерческих дронов (CDA), Национальная ассоциация сельскохозяйственной авиации (NAAA), SAE International (SAE) и Малый Коалиция БПЛА. Ниже приводится краткое изложение полученных комментариев и ответов FAA.
AIA, AOPA, A4A, Amazon Prime Air, народность чокто, Альянс коммерческих дронов, SAE и двенадцать других комментаторов выразили поддержку этой политике.
A. Процесс сертификации
Анонимный комментатор попросил FAA опубликовать график процесса сертификации. Приказ FAA 8110.4C, Сертификация типа , от 28 марта 2007 г., [3] содержит процедуры и политику для сертификации типа продукции. В этом приказе описываются обязанности FAA и заявителя при установлении графика проекта. Сроки сертификации для каждого проекта будут значительно различаться в зависимости от деталей, объема и сложности проекта. Из-за этих многих переменных FAA не может опубликовать временную шкалу, относящуюся к сертификации типа БАС, которая была бы широко применима.
Лицо обратилось к FAA с просьбой установить менее строгий процесс сертификации типа БАС для служб быстрого реагирования и операторов управления чрезвычайными ситуациями для государственных органов и подразделений. Комментатор предположил, что, поскольку основной задачей аварийно-спасательных служб является общественная безопасность, процесс сертификации типа был обременительным и необоснованным. Некоторые правила гражданской сертификации и надзора за безопасностью FAA не применяются к общественным самолетам. Самолеты, которые не соответствуют требованиям для получения статуса государственных самолетов, являются гражданскими самолетами. [4] БПЛА, эксплуатируемые государственными учреждениями, правоохранительными органами и государственными органами общественной безопасности, могут считаться общественными воздушными судами, как это определено законом в соответствии с 49 U.S.C. 40102(а)(41) и 40125. [5] Эта политика сертификации типа некоторых БПЛА применяется только к гражданским самолетам.
Aero Systems West запросила у FAA ускоренный процесс для небольших БАС с установленными системами безопасности парашюта. Комментатор заявил, что контроль скорости снижения является наиболее важным фактором, способствующим снижению вероятности получения травм человеком во время неудачного полета БАС. FAA не соглашается с тем, что для конструкций, включающих парашютную систему, подходит другой процесс. Хотя система спасения парашюта может снизить некоторые риски для БАС, сама по себе она вряд ли обеспечит комплексное снижение всех потенциальных рисков, так что ускоренный процесс сертификации типа будет подходящим.
Другой человек спросил, как общественность может давать содержательные комментарии по конкретным критериям летной годности для каждого заявителя, когда FAA обычно не раскрывает собственные эксплуатационные и проектные данные заявителя. В рамках процесса сертификации в качестве особого класса самолетов FAA опубликует уведомление для общественного обсуждения о конкретных критериях летной годности для каждого заявителя. Комментатор прав в том, что FAA не может раскрывать проприетарные или конфиденциальные данные о конструкции от производителей в этих уведомлениях, поскольку такое раскрытие запрещено Законом о коммерческой тайне, 18 U.S.C. 1905 (1979). Вместо этого FAA предоставит общее описание продукта, аналогичное тому, что будет показано в паспорте сертификата типа (TCDS). Этому же процессу следует FAA для сертификации самолетов специального класса, таких как планеры, дирижабли и очень легкие самолеты.
CNO и CDA обратились к FAA с просьбой уточнить влияние этой политики на другие правила. Этот запрос касался заявления в предлагаемой политике о том, что политика будет применяться только к процедурам сертификации типа БАС и не предназначена для установления или воздействия на другие правила FAA (эксплуатация, сертификация пилотов или техническое обслуживание) в отношении БАС. Эти комментаторы согласились с тем, что сертификат типа не предоставит оператору БАС эксплуатационные полномочия, но заявили, что FAA должно разъяснить, что эксплуатационные ограничения в TCDS будут касаться и, следовательно, влиять на такие вопросы, как эксплуатация, сертификация пилотов или техническое обслуживание. FAA соглашается с тем, что сертификация типа отдельного БАС может включать эксплуатационные ограничения, влияющие на эксплуатацию, сертификацию пилотов или техническое обслуживание. Цель заявления в предложении состояла в том, чтобы сообщить общественности о том, что FAA не намеревается, чтобы эта политика отменяла правила FAA, касающиеся UAS, особенно другие правила FAA, выходящие за рамки части 21.
B. Применимость этой политики
Лицо и AOPA потребовали, чтобы FAA освободило модели самолетов от этой политики, и пятнадцать отдельных комментаторов возражали против политики, утверждая, что это окажет негативное влияние на любителей. CNO и CDA заявили, что политика должна применяться ко всем БПЛА независимо от их веса. Несколько комментаторов просили FAA уточнить типы расширенных операций, помимо доставки пакетов, на которые распространяется политика, и для каких БАС может потребоваться сертификация типа.
Эта политика касается процесса, который FAA будет использовать для установления стандартов летной годности для сертификации типа некоторых БАС без пассажиров на борту, когда производитель БАС запрашивает сертификацию типа. Требуется ли для БАС сертификат типа, зависит от веса БАС, цели операций и конкретных правил эксплуатации, согласно которым БАС должен работать. [6] Эта политика не распространяется на БАС, которые эксплуатируются за исключением ограниченных развлекательных полетов, поскольку от них не требуется соответствие требованиям летной годности или подача заявки на сертификацию типа. [7] Малые БАС, работающие в соответствии с частью 107, не требуют сертификата типа. [8] БАС весом 55 фунтов или более, а также малые БАС, работающие в соответствии с требованиями 14 CFR, части 91 или 135, требуют либо сертификата типа, отказа от требований, либо специального сертификата летной годности, в зависимости от ситуации. Эта политика может повлиять, например, на доставку посылок и другие сложные операции, такие как сельскохозяйственные работы, инспекции, мониторинг, наблюдение за инфраструктурой, псевдоспутники или операции, связанные с перевозкой другого имущества за компенсацию или в аренду.
Один комментатор попросил, чтобы политика не применялась к БАС, перевозящим пассажиров, поскольку любой БАС, перевозящий пассажиров, должен быть сертифицирован в соответствии с тем же процессом, что и пилотируемые летательные аппараты. FAA соглашается. Эта политика касается сертификации типа некоторых беспилотных летательных аппаратов без пассажиров на борту.
AIA потребовала, чтобы в сферу действия политики также входили дополнительно пилотируемые воздушные суда. Комментатор заявил, что факультативно пилотируемые летательные аппараты становятся все более возможными по мере развития технологий. FAA не соглашается. Необязательно пилотируемый летательный аппарат (OPA) — это пилотируемый летательный аппарат, которым может управлять бортовой пилот или другое лицо, не находящееся на борту летательного аппарата. [9] Хотя метод управления самолетом не является обязательным, в любом случае командир всегда остается на борту самолета. Таким образом, OPA выходят за рамки этой политики, поскольку они не являются беспилотными летательными аппаратами, как это определено в 49 U.S.C. 44801(11) и 14 CFR 1.1.
D. Запросы на изменение политики
CNO и CDA потребовали, чтобы политика сертификации типа была упорядоченной, гибкой и учитывала изменяющиеся технологии. Комментаторы заявили, что процесс сертификации типа должен занимать месяцы, а не годы, и должен учитывать инновации. FAA отвечает, что эта политика обеспечивает гибкий процесс сертификации типа, который позволяет устанавливать конкретные критерии летной годности для каждой конструкции продукта. В соответствии с этой политикой по мере изменения технологий и предложений заявителей инновационных и уникальных типовых конструкций могут развиваться и критерии летной годности. FAA также отмечает, что скорость любой программы сертификации определяется многими факторами, включая сложность проекта и сроки разработки и тестирования заявителя.
Joby Aviation обратилась в FAA с просьбой определить приоритетность использования существующих стандартов летной годности в соответствии с процессом, описанным в § 21.17 (a), когда продукт близко соответствует характеристикам класса самолета или винтокрыла и когда особые условия (согласно § 21.16) могут быть разумно использованы для устранения различий. . Комментатор заявил, что подход с использованием гибкости процесса специального класса в § 21. 17(b) имеет смысл для определенных БАС или продуктов, для которых нецелесообразно применять существующие стандарты летной годности. Целью этой политики является использование гибкости, обеспечиваемой процессом сертификации по § 21.17(b), для рассмотрения уникальных конфигураций и инновационных применений планеров, силовых установок, топлива и материалов, используемых в большинстве конструкций БПЛА. Для конструкций беспилотных самолетов и беспилотных винтокрылых аппаратов, для которых стандарты летной годности, указанные в части 23 или 27 соответственно, подходят для основы сертификации, FAA может по-прежнему выдавать сертификаты типа в соответствии с процедурами, изложенными в §§ 21.16 и 21.17(a). Путь сертификации для каждого отдельного проекта UAS будет основываться на применимости, релевантности, уместности и пригодности.
Joby Aviation также запросила сертификат FAA для пассажирских БПЛА в соответствии с существующими проверенными стандартами в части 23 или части 27, в зависимости от конструкции отдельного самолета, в соответствии с процедурой, описанной в § 21. 17 (a). Компания Kilroy Aviation предложила многоуровневый подход к сертификации БАС с одним уровнем для пассажирских БАС. Эти комментарии выходят за рамки этой политики, которая не применяется к БАС, перевозящим пассажиров.
Другой комментатор попросил, чтобы FAA более тщательно определило типы, методы и сроки сертификации, прежде чем опубликовать эту политику. Этот комментатор заявил, что широкое разнообразие типов и способов использования UAS делает один общий тип сертификации неэффективным или даже бессмысленным. FAA отмечает, что эта политика является лишь процедурной политикой для установления стандартов летной годности для сертификации типа некоторых БАС. Уведомление о предлагаемой политике запроса комментариев для сертификации типа беспилотных авиационных систем, опубликованное в Федерального реестра от 3 февраля 2020 г. (85 FR 5905) объясняются законодательная и нормативная история, предыстория и причины, по которым FAA сертифицирует тип определенных БПЛА как особого класса самолетов в соответствии с § 21. 17 (b). Целью этой политики является обеспечение гибкости процесса до тех пор, пока не будут определены и установлены общеприменимые стандарты летной годности БАС. В рамках процесса сертификации в качестве особого класса самолетов FAA опубликует уведомление с запросом общественного мнения по конкретным критериям летной годности для каждого заявителя. Конкретные критерии летной годности не станут окончательными до тех пор, пока FAA не рассмотрит любые комментарии общественности и не опубликует критерии летной годности в качестве основы для сертификации конструкции заявителя.
PRC потребовал, чтобы политика FAA использовала три категории БАС (открытые, специальные и сертифицированные), предложенные Объединенными органами по разработке правил в отношении беспилотных систем (JARUS) и выпущенные Европейским Союзом. [10] Этот комментатор также просил FAA своевременно информировать международных авиационных партнеров о своих стандартах сертификации типа БАС. FAA отмечает, что эта политика является лишь процедурной политикой для установления стандартов летной годности для сертификации типа определенных БАС. Если FAA сочтет это целесообразным, по мере развития технологии UAS и определения общеприменимых стандартов FAA может установить стандарты посредством нормотворчества. В ходе этой деятельности FAA дополнительно оценит категории БАС, установленные Агентством по авиационной безопасности Европейского союза (EASA), и разнообразие конструкций БАС, чтобы помочь информировать агентства о будущих действиях. FAA продолжит сотрудничество с международными партнерами в правительстве и промышленности по требованиям сертификации БАС.
Kilroy Aviation, CNO и CDA прокомментировали ресурсы FAA для проектов сертификации БПЛА. CNO и CDA обратились к FAA с просьбой выделить достаточно персонала для поддержки экспоненциального роста проектов сертификации БАС. Компания Kilroy Aviation запросила у делегата FAA выводы о соответствии UAS назначенным лицам. FAA стремится к безопасной и эффективной интеграции БАС в NAS, и сертификация типа БАС является важным шагом в этом процессе. FAA продолжит оценивать свои ресурсы и вносить необходимые коррективы в процессы сертификации БПЛА и других самолетов. Однако комментарии относительно делегирования результатов сертификации UAS назначенным лицам выходят за рамки этой политики.
Один из комментаторов потребовал запретить производителям БПЛА самостоятельную сертификацию своих разработок. Этот комментарий выходит за рамки этой политики. Эта политика описывает только процесс того, как FAA будет устанавливать стандарты летной годности для сертификации типа определенных БАС. Приказ FAA 8110.4C содержит процедуры и политику для сертификации типа продукции, в том числе то, как заявитель на сертификат типа демонстрирует соответствие требованиям.
CNO и CDA обратились к FAA с просьбой обеспечить раннюю и частую координацию между офисами FAA. Эти комментаторы заявили, что межведомственная координация между лицами, ответственными за выдачу сертификата типа, и лицами, ответственными за выдачу эксплуатационных полномочий, имеет решающее значение, так что заявители имеют полномочия эксплуатировать БАС при выдаче сертификата типа. FAA соглашается. Сертификат типа является одобрением конструкции и только одним из нескольких требований (летная годность, сертификация пилота, регистрация, разрешение управления воздушным движением, сертификация авиаперевозчика и т. д.), которые должны быть выполнены для того, чтобы воздушное судно могло работать в NAS. FAA создало Управление интеграции UAS для облегчения координации между офисами FAA в деятельности UAS.
ALPA обратилось к FAA с просьбой ограничить срок действия политики не более чем двумя годами, поскольку этот процесс должен быть только промежуточным, пока FAA не разработает правила сертификации, специально предназначенные для БАС. FAA не соглашается. В настоящее время невозможно предсказать, когда будут установлены общеприменимые стандарты летной годности для БАС или какую форму они могут принять. FAA может заменить эту политику в любое время, выпустив общеприменимые стандарты посредством нормотворчества.
Пользователь запросил политику определения беспилотных летательных аппаратов с использованием согласованной таксономии. Этот комментатор отметил, что многие распространенные конструкции БПЛА нелегко отнести к категории самолетов, винтокрылых аппаратов или гибридных подъемников. Этот комментатор также потребовал, чтобы в политике был определен термин «беспилотная авиационная система», поскольку этот термин не определен в 14 CFR 1.1. FAA соглашается с тем, что конструкции БАС разнообразны. Однако эта политика касается только процесса установления FAA стандартов летной годности для сертификации типа определенного БАС как особого класса. Хотя в 14 CFR часть 1 нет соответствующего определения, термин «беспилотная авиационная система» определен законом в 49USC 44801(12) в качестве беспилотного летательного аппарата и связанных с ним элементов (включая линии связи и компоненты, управляющие беспилотным летательным аппаратом), которые необходимы оператору для безопасной и эффективной работы в NAS. [11]
E. Критерии летной годности для БАС
ALPA, CNO, CDA, NAAA, Wing Aviation LLC (Wing Aviation), Kilroy Aviation, Valqari LLC и шесть отдельных комментаторов обратились к FAA с просьбой принять конкретные критерии летной годности для УАС. Эти критерии включали такие предметы, как погода, предотвращение столкновений, маркировка и окраска, стробоскопическое освещение, оценка безопасности системы, полезная нагрузка, вес, программное обеспечение, кожухи винтов и другое оборудование для обеспечения безопасности, шум, батареи, общественная безопасность и станции управления. Kilroy Aviation обратилась в FAA с просьбой рассмотреть вопрос об использовании критериев сертификации для «самолетов вертикального взлета и посадки малой категории», принятых EASA. Amazon Prime Air потребовала, чтобы, хотя FAA использует процесс согласно § 21.17(b) для сертификации типа, агентство также сформировало рабочую группу для оценки и создания новых правил для стандартов летной годности БАС. Эти комментарии выходят за рамки данной политики. В этой политике изложены только процедуры того, как FAA будет устанавливать стандарты летной годности для сертификации типа определенных БАС. Конкретные критерии летной годности для каждого заявителя будут варьироваться в зависимости от обстоятельств и применимы к конкретной конструкции БАС. FAA объявит и запросит общественное мнение по критериям летной годности для каждого заявителя. FAA также продолжит работу с общественностью, промышленностью, другими органами гражданской авиации и организациями по разработке стандартов для создания и уточнения стандартов и политики для БАС.
Wing Aviation и другие комментаторы потребовали, чтобы критерии летной годности для БАС основывались на характеристиках. FAA согласовывает и ожидает выдачи критериев летной годности, основанных на характеристиках, на основе конструкции каждого заявителя, когда это возможно. FAA объявит и запросит общественное мнение по этим критериям для каждого заявителя.
Kilroy Aviation, CNO и CDA обратились к FAA с просьбой согласовать стандарты сертификации БАС с EASA и другими иностранными органами гражданской авиации. FAA соглашается с тем, что согласование и согласованность политики и требований UAS с иностранными властями является благоразумным; однако реализация этого комментария выходит за рамки этой политики.
F. Эксплуатационные правила для UAS
CNO, CDA, Valqari LLC и три отдельных комментатора обратились к FAA с просьбой принять конкретные критерии и правила для UAS, основанные на эксплуатационных факторах. Эти факторы включали операции вне прямой видимости (BVLOS) (особенно в сельской местности), выделенное воздушное пространство ниже 400 футов для использования сельскохозяйственных дронов, ночные операции и место действия БАС. Операционные соображения, такие как BVLOS и требования обнаружения и исключения, выходят за рамки этой политики.
Несколько комментаторов также потребовали, чтобы политика основывалась на рисках и учитывала конкретные риски, с которыми сталкивается каждый БАС в своей операционной среде. FAA соглашается и планирует использовать риск-ориентированный подход для сертификации типа БАС. FAA ожидает выпуска критериев летной годности, основанных на характеристиках, для каждого отдельного проекта заявителя. Например, некоторые заявители продемонстрируют соответствие критериям с помощью испытаний на долговечность и надежность (D&R) на уровне, адаптированном для конструкции с учетом ее риска. В результате испытаний D&R будет получено приемлемое количество успешных летных часов, репрезентативное для циклов полетов, чтобы подтвердить общую надежность БАС.
Несколько комментаторов потребовали, чтобы FAA ограничило полеты БАС над жилыми районами и школами и обеспечило защиту права граждан на неприкосновенность частной жизни. Эксплуатационные вопросы, поднятые в этих комментариях, выходят за рамки данной политики, которая ограничивается процессом установления стандартов летной годности для сертификации типа.
CNO, CDA и физическое лицо потребовали, чтобы FAA совместило эксплуатационные полномочия с выдачей сертификата типа. Эти комментаторы предположили, что, поскольку критерии летной годности для каждого сертифицированного типа БАС будут проходить через процесс публичного уведомления и комментариев, этот процесс должен включать любые исключения из частей 9.1 и 61 (общие правила эксплуатации и полетов и требования к сертификации летного экипажа), необходимые для эксплуатации. Эти комментаторы также предположили, что условия и ограничения, обычно включаемые в предоставление исключения, могут быть затем включены в TCDS в качестве операционных ограничений. В этой политике излагается процесс того, как FAA будет устанавливать стандарты летной годности для сертификации типа определенных БАС. Процесс освобождения от правил эксплуатации и сертификации летчиков описан в 14 CFR, часть 11.
G. Запрос общеприменимых стандартов
Kilroy Aviation, CNO, CDA и физическое лицо обратились к FAA с просьбой своевременно издать дополнительные инструкции или правила или признать стандарты для сертификации БАС. FAA занимается разработкой правил, политики, процедур, инструктивного материала и требований к обучению, необходимых для обеспечения безопасной и эффективной интеграции БАС в NAS. Осуществление этих мероприятий выходит за рамки данной политики.
H. Комментарии относительно летчиков
Компания Droneport Texas LLC обратилась в FAA с просьбой обновить требования к обучению дистанционных пилотов и учебные пособия, чтобы пилоты знали о различиях сертифицированных по типу БАС. Этот комментатор также просил FAA организовать специализированное обучение для техников, операторов и дистанционных пилотов типа UAS, сертифицированного как особый класс самолетов. Один человек попросил FAA разработать различные классы пилотов-любителей БПЛА. Другой человек обратился в FAA с просьбой создать специальные рейтинги типов самолетов для удаленных пилотов. Однако вопросы обучения и сертификации летчиков, поднятые в этих комментариях, выходят за рамки этой политики, которая ограничивается процессом сертификации типа.
I. Запросы к FAA об отзыве политики
Анонимный комментатор выступил против политики и заявил, что она будет подавлять инновации, ограничивать возможности для отдыха и излишне нарушать личные свободы. Пятнадцать отдельных комментаторов выступили против этой политики, опасаясь, что она перегрузит любителей и негативно повлияет на сообщество авиамоделистов. FAA делает вывод, что эти комментаторы хотели бы, чтобы FAA отозвало политику. Эта политика не обременит и не окажет негативного влияния на лицо, выполняющее ограниченные развлекательные операции с небольшим беспилотным летательным аппаратом до 49 лет.USC 44809, так как для этих операций не требуется сертификация типа. Для других БАС может потребоваться сертификация типа в зависимости от веса БАС, цели операций и правил эксплуатации, которым подчиняется БАС. Эта политика обеспечивает своевременный и гибкий процесс сертификации типа, чтобы гарантировать, что конструкция БАС соответствует соответствующим стандартам безопасности.
J. Запросы на продление периода комментариев
Два отдельных комментатора обратились к FAA с просьбой продлить период комментариев, чтобы запросить дополнительную информацию и определить дополнительные требования. В этих комментариях отмечается, что период комментариев для этого уведомления совпал с периодом комментариев для предложенного Федеральным управлением гражданской авиации нормотворчества по удаленной идентификации БПЛА (84 FR 72438, 31 декабря 2019 г. ).). FAA рассмотрело запрос и определило, что 30 дней являются подходящим сроком для комментариев по предлагаемой политике, поскольку общественность предоставила достаточные отзывы о политике в течение периода комментариев.
K. Комментарии к другим правилам FAA
Некоторые комментаторы выразили озабоченность по поводу предложенного FAA правила удаленной идентификации. Другие комментаторы заявили о несогласии с правилами FAA для малых БАС в части 107. DJI Technology, Inc. прокомментировала операции и связанные с ними исключения в части 107. Поскольку эти комментарии касаются нормотворчества FAA по другим вопросам, они выходят за рамки данной политики.
L. Другие комментарии, не входящие в сферу компетенции
Два комментатора запросили у FAA адрес продуктов, связанных с БАС (детали, напечатанные на 3D-принтере, испытательные стенды). DJI Technology, Inc. обратилась к FAA с просьбой пересмотреть свои правила, чтобы позволить американским компаниям производить БАС на предприятиях за пределами США. Отдельный автор комментариев попросил FAA пересмотреть 14 CFR 21.25(a)(1), чтобы разрешить использование БАС в качестве операции специального назначения для выдачи сертификата типа ограниченной категории. Эти комментарии выходят за рамки данной политики, определяющей процесс установления стандартов летной годности для сертификации типа некоторых БАС.
FAA также получило и рассмотрело несколько комментариев, которые носили очень общий характер, в которых излагалась точка зрения комментатора без предложения, относящегося конкретно к политике, или не делалось запросов, по которым FAA может действовать. Эти комментарии выходят за рамки этой политики.
Политика
FAA определило, что некоторые БАС могут быть сертифицированы как самолеты «специального класса» в соответствии с § 21.17(b). FAA выдает сертификаты типа для беспилотных летательных аппаратов без пассажиров на борту в соответствии с процедурой, описанной в § 21.17(b). Тем не менее, FAA может по-прежнему выдавать сертификаты типа в соответствии с § 21. 17(a) для конструкций самолетов и винтокрылых БПЛА, если стандарты летной годности в частях 23, 25, 27 или 29, соответственно, подходят для сертификационной базы. Эта политика применяется только к процедурам сертификации типа БАС и не предназначена для установления политики, влияющей на другие правила FAA, касающиеся беспилотных летательных аппаратов, таких как эксплуатация, сертификация пилотов или техническое обслуживание.
FAA будет запрашивать общественное мнение о конкретных критериях летной годности для каждого заявителя по мере развития стандартов сертификации для этого нового специального класса. После определения общеприменимых стандартов FAA может заняться нормотворчеством.
Принятие Федеральным управлением гражданской авиации части 107 правил, касающихся малых БАС, было лишь первым шагом в плане Федерального управления гражданской авиации по интеграции БАС в NAS. Для полной интеграции нынешних и будущих операций БАС требуется много долгосрочных мероприятий, которые будут включать доставку посылок и перевозку людей. UAS, на которые распространяется эта политика, будет включать те, которые используются для доставки пакетов. Будущая деятельность FAA, посредством дальнейшей политики или нормотворчества, будет касаться сертификации типа БАС, перевозящих пассажиров.
Содержание этого документа не имеет силы закона и никоим образом не связывает общественность. Этот документ предназначен только для разъяснения общественности существующих требований в соответствии с законом или политикой агентства.
Начальная подпись
Конечная подпись Конец дополнительной информации
1. См. 14 CFR 107.3.
Вернуться к цитате
2.
Но см. предложенную FAA поправку к части 107, разрешающую полеты малых БАС над людьми в определенных условиях (84 FR 3856, 13 февраля 2019 г. ).).
Вернуться к цитате
3. Вы можете найти этот приказ по адресу http://www.faa.gov/regulations_policies/orders_notices.
Вернуться к цитате
4. 49 США 40102(а)(16).
Вернуться к цитате
5. Название 49 U.S.C. 40102(a)(41) дает определение «общественного воздушного судна», а § 40125 устанавливает требования для получения статуса общественного воздушного судна. Дополнительная информация о самолетах общего пользования представлена в Консультативном циркуляре (AC) 00-1.1B «Эксплуатация самолетов общего пользования — пилотируемые и беспилотные». Этот кондиционер доступен в https://www.faa.gov/documentLibrary/media/Advisory_Circular/AC_00-1.1B.pdf.
Вернуться к цитате
6. Дополнительную информацию о правилах для каждого типа пользователей UAS можно найти по телефону https://www.faa.gov/uas/.
Вернуться к цитате
7. См. 49 U.S. 44809.
Вернуться к цитате
8. См. 14 CFR 21.1(а).
Вернуться к цитате
9. См. Приложение F к Приказу FAA 8130.34D, Сертификат летной годности беспилотных авиационных систем и дополнительно пилотируемых летательных аппаратов, от 8 сентября 2017 г. Вы можете найти этот приказ по адресу http://www.faa.gov/regulations_ политика/заказы_уведомления.
Вернуться к цитате
10. https://www.consilium.europa.eu/media/40525/delegated-act_drones. pdf.
Вернуться к цитате
11. См. также 14 CFR 107.3.
Вернуться к цитате
[фр. док. 2020-17882 Подано 17.09.20; 8:45]
КОД БИЛЛИНГА 4910-13-P
Глоссарий терминов и определений беспилотных летательных аппаратов ATI —
У ATI есть несколько курсов по беспилотным авиационным системам (БАС), включая
- Основы беспилотных летательных аппаратов
- Обзор беспилотных авиационных систем
Следующие аббревиатуры и определения полезны для понимания беспилотных авиационных систем, включая определения, концепции и общие принципы БПЛА.
Беспилотный летательный аппарат (БПЛА), широко известный как дрон, представляет собой летательный аппарат без пилота-человека на борту. Его полет управляется либо автономно компьютерами в транспортном средстве, либо под дистанционным управлением пилота на земле или в другом транспортном средстве. Существует большое разнообразие форм, размеров, конфигураций и характеристик дронов. Исторически БПЛА представляли собой простые беспилотные летательные аппараты, но все чаще используется автономное управление.
Они используются преимущественно в военных целях, но также используются в небольшом, но растущем числе гражданских приложений, таких как охрана правопорядка, пожаротушение и невоенная работа по обеспечению безопасности, например наблюдение за трубопроводами. БПЛА часто предпочитают для миссий, которые слишком «скучны, грязны или опасны» для пилотируемых самолетов. Соединенные Штаты, ВМС США и вскоре после этого Федеральное авиационное управление приняли название беспилотный летательный аппарат (UA) для описания авиационных систем без летного экипажа на борту. Более распространенные названия включают БПЛА, беспилотный летательный аппарат, дистанционно-пилотируемый летательный аппарат (ДПЛА), дистанционно-пилотируемый летательный аппарат (ДПЛА), дистанционно управляемый летательный аппарат (РОА). Эти «ограниченные по размеру» (по определению FAI) беспилотные летательные аппараты, используемые в Национальной системе воздушного пространства США, предназначенные исключительно для отдыха и спорта, такие как модели, обычно летают в соответствии с добровольными стандартами безопасности Академии модельного аэронавтики, Национальная организация авиамоделирования США. Чтобы использовать UA в неразвлекательных целях в Соединенных Штатах, пользователи должны получить Сертификат авторизации (COA) для работы в национальном воздушном пространстве.[20] На данный момент COA требуют, чтобы в качестве спонсора выступала государственная организация. Например, когда BP нужно было наблюдать за разливами нефти, они эксплуатировали БПЛА Aeryon Scout в соответствии с сертификатом подлинности, выданным Университету Аляски в Фэрбенксе.[21] Сертификаты подлинности были выданы как для наземных, так и для морских операций.
Термин «беспилотная авиационная система» (БАС) подчеркивает важность других элементов помимо самого самолета. Типичный БАС состоит из:
- беспилотного летательного аппарата (БЛА) Система управления
- , например наземная станция управления (GCS) Канал управления
- , специализированный канал данных
- другое вспомогательное оборудование.
Например, БПЛА RQ-7 Shadow состоит из четырех БПЛА, двух GCS, одного портативного GCS, одной пусковой установки, двух наземных терминалов данных (GDT), одного портативного GDT и одного удаленного видеотерминала. Некоторые воинские части также имеют машину технического обслуживания.
Из-за такого системного подхода беспилотные авиационные системы не были включены в Перечень боеприпасов США, категория VIII — Самолеты и сопутствующее оборудование. И наоборот, «Беспилотные летательные аппараты» четко упоминаются в параграфе 121-16 Приложения о режиме контроля за ракетными технологиями Списка боеприпасов Соединенных Штатов. Точнее, Приложение к режиму контроля за ракетными технологиями уравнивает ракетные и беспилотные летательные аппараты.
С тех пор термин UAS был принят Министерством обороны США (DOD) и Управлением гражданской авиации Великобритании (CAA).
Ранее для беспилотной авиационной системы использовался термин «беспилотная авиационная система» (БПЛА).
ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ
1 Акронимы и сокращения. В целях настоящего соглашения используются следующие сокращения.
A
ACCS Армейская система управления и контроля (США)/Воздушная система управления и контроля (НАТО)
Accel Ускорение
ACK Подтверждение
ACM Управление воздушным пространством среднее значение
ACO Порядок управления воздушным пространством
ADATP-3 Публикация данных с союзниками-3
ADS Автоматическое зависимое наблюдение
ADT Air Templin Над уровнем земли
AMPS Система планирования полетов авиации
AMPN Усиление
ANSI Американский национальный институт стандартов
AOA угол атаки
AOI Области интересов
AP Publication/Publication/Publication Alliance
API Прикладная программа (MIN Anti-Submarine Warfare
ATC Управление воздушным движением
ATP Allied Tactical Publication
ATR Автоматическое распознавание целей
ATS Службы авиаперевозок
AV Air автомобиль
AVC Управление воздушным транспортным средством
B
BDA Оценка повреждений битвы
BER Бит. BITE Встроенное тестовое оборудование
BLOS За пределами прямой видимости
BOM Бит-ориентированное сообщение
C
C2 Управление и управление
C4I Command, Control, Communications, Computers and Intelligence
CBIT Continuous Built-in-Test
CBRN Chemical, Biological, Radiological and Nuclear
CCI Command & Control Interface
CCISM Special and Control Interface Модуль
CDL Common Data Link
CEN Европейская организация по стандартизации
CEP Вероятность круговой ошибки
CFOV Центральное поле зрения
CG Centre of Gravity
CGS Common Ground Segment/Common Ground Station/Common Ground System
CIRC Circular
CJTF Combined Joint Task Force
CL Connectionless
Cm Centimetres
CO Connection Ориентированная
COE Общая рабочая среда
CONOPS Принцип работы
COP Общая рабочая картинка
CORBA Common Object Request Broker Architecture
COTS Commercial-Off-The-Shelf
CR Communications Relay
CRD Common Route Definition
CRT Cathode Ray Tube
CUCS Core UAV Control System
D
DC Постоянный ток
DCE Распределенная вычислительная среда
DCM Модуль управления каналом передачи данных
DIGEST Стандарт обмена цифровой географической информацией
DII Инфраструктура информации о защите
DII/COE Инфраструктура информации обороны. DTED Цифровые данные о высоте местности
E
ECM Электронные меры противодействия
EIA Electronic Industries Association
EIA/IS EIA Interim Standard
ELINT Electronic Intelligence
EMCON Emission Control
EO Electro-Optical
EO/IR Electro Optical/Infrared
EP External pilot
ERF Ego- Эталонный кадр
ERS Система аварийного восстановления
ESM Электронные меры поддержки
ETA Расчетное время прибытия
ETSI Европейский институт стандартов электросвязи
EW Electronic Warfare
F
FLIR Forward Looking Infrared
FOB Forward Operations Base
FOV Field of View
FT Flight Termination
FTP File Transfer Protocol
G
GDT Терминал наземных данных
GMT Среднее время по Гринвичу
GMTI Наземный индикатор подвижной цели
GOTS Государственная готовая
GPS Global Positioning System
GUI Graphical User Interface
H
HALE High Altitude, Long Endurance
HCI Human Computer Interface
HF High Frequency
HSI Hyperspectral Imagery
HL Запущен вручную
HTML Язык гипертекстовой разметки
HTTP Протокол передачи гипертекста
Гц Герц , циклов в секунду
I
I/O Ввод/вывод
IA Международное соглашение
ICAO Международная организация гражданской авиации
. Соглашения
IEC Международный комитет предприятий/Международная электротехническая комиссия
IEEE Институт инженеров по электротехнике и электронике
IER Требования об обмене информацией
IES Система эксплуатации изображений
IETF Инженерная целевая группа
IFF Идентификационный друг или FOE
IL Библиотека изображений
IS Inertative NAVGET
IPS Службы печати изображений
IPX Транспортный протокол NetWare
IR Инфракрасный порт
IRS Требования к интерфейсу. Спецификации
ISAR Интегрированная цифровая сеть ISAR Цифровая сеть
Группа отраслевой поддержки ISG
1 ISO Международная организация для стандартизации
ISO/CD Committe Committe Draft of ISO1111101101110110111 гг.
/DIS Проект международного стандарта ISO ISR Разведка, наблюдение, рекогносцировка
ISTAR Разведка, наблюдение, обнаружение целей и рекогносцировка
ITDP International Technology Demonstration Program
ITU International Telecommunication Union
ITU-T(SB) International Telecommunications Union – Telecommunications (Standardisation Bureau)
J
JFACC Joint Force Air Component Commander
JFC Командующий объединенными силами
JPEG Объединенная группа экспертов по фотографии
JSH Справочник по стандартам JASA
JSWG JASA Standards Working Group
JTA Joint Technical Architecture
JTF Joint Task Force
JTFC Joint Task Force Commander
K
Kilo 1,000
Km Kilometres
L
L&R Launch and Recovery
L-16 Link-16 (стандарт сообщений TADIL-J)
LIDAR Light Detection And Ranging
LAN Local Area Network
LAS Local Access Subsystem
LB Land-Based
LCD Liquid Crystal Display
LOI Level of Interoperability
LOS Line of Sight
LRF Laser Range Finder
M
MAV Micro Air Vehicle
Мб Мегабит
Мб Мегабайт
Мб/с Мегабит в секунду
Мб/с
Мегабайт в секунду1101 Met Meteorological
MGRS Military Grid Reference System
MIJI Meaconing, Intrusion, Jamming, and Interference
MIL Military
MIL-STD Military Standard
MIME Multipurpose Internet Mail Extension
MIN Минимум
MMP Modular Mission Payload
MMS Спецификация производственных сообщений
MOA Меморандум о соглашении
MOTS военный автострад
MOU Меморандум о понимании
MP Планирование миссии/Планировщик миссии
MPEG Экспериальные эксперименты на снимках. в секунду
MSE Мобильное абонентское оборудование
Msg Сообщение
MSI Мультиспектральные изображения
MSK Минимальная манипуляция сдвига
MSL Mean Sea Level
MTF Message Text Formats
MTI Moving Target Indicator
N
N/A Not Applicable
NATO North Atlantic Treaty Organisation
NBC Nuclear, Biological and Chemical
NC3TA Техническая архитектура C3 НАТО
NCIS Общие стандарты совместимости НАТО
NCOE Общая операционная среда НАТО
NCSP NC3 Common Standards Profile
Near RT Near Real Time
NED NATO Effective Date
NIIA NATO ISR Interoperability Architecture
NIMP NATO Interoperability Management Plan
NIIRS National Imagery Interpretation Rating Scale
NIPD Документ планирования функциональной совместимости НАТО
NITF Национальный формат передачи изображений
NITFS Национальный стандарт формата передачи изображений
NM Nanometer
NNAG NATO NATO NATAL ARMAMents Group
NOSIP НАТО ОТКРЫТАЯ ПРОФИЛЬ
NOTS NATO. Нестандартное оборудование
NSIF Формат вторичного изображения НАТО
NSIL Стандартная библиотека изображений НАТО
NSILI Интерфейс стандартной библиотеки изображений НАТО
NSR NATO Staff Requirements
NTF Network File Server
NTIS NATO Technical Interoperability Standards
NTSC National Transmission Standards Committee
O
OPFOR Opposing Force
OPS Operations
OSE Open System Environment
OSI Open System Interconnection (model)
OTH Over The Horizon
OTH -T Over The Horizon — Targeting
P
PDF Формат портативного документа
PDU . of Service
R
Rad Radians
RAID Избыточный массив недорогих/независимых дисков
RECCEXRE Reconnaissance Exploitation Report
RF Радиочастота
RFC Запрос на комментарий
ROS РЕСЕНАСКА НА Станции/ Правилах безопасности
RP План маршрута
RPT Отчет
RT Реальное время
RPTP. Процессор времени
Rx Receive
S
SA Situational Awareness
SALUTE Size, Activity, Location, Unit, Time, Equipment
1101 SATCOM Спутниковые связи
SB на основе моря
SEC секунд
SED Внешний дескриптор
SIGINT Signals Entelligence
SINCGRAS ОСНОВНЫЙ ГРУМАНИЕ И СИГРИИ RAHINGE
SMTP Простой протокол передачи почты
SNR Отношение сигнал/шум
ST Группа специалистов
STANAG (NATO) Standardization Agreement
T
TBD To Be Defined
TCDL Tactical Common Data Link
TCP/IP Transfer Control Protocol/Internet Protocol
Tgt Target
TV Телевидение
TX Передача
U
БПЛА Беспилотный летательный аппарат/необитаемый летательный аппарат
UB Унифицированная сборка
UCAV Unmanned/ Uninhabited Combat Aerial Vehicle
UDP User Datagram Protocol
UES UAV Exploitation System
UHF Ultra High Frequency
UI User Interface
UJTL Universal Joint Task List
UPS Uninterruptible Power Supply
URL-адрес Единый указатель ресурсов
USIS Стандарты изображений США
USMTF Форматирование текста сообщений США
UTC Универсальный координированный времени
UTM Универсальный поперечный Mercator
V
VCR Video Cassetette Decorder
VDL VHF Link
VDU VDL VHF Link
VDU VDL VHF Link
VDU VDL VHF. Профиль стандартов видеоизображения
VMAP Векторная карта
VMF Переменный формат сообщения
VSM Специальный модуль для транспортных средств
W
WAN Глобальная сеть
WAS Подсистема глобальной сети
WGS-84 World Geodetic System – 84
WIMP )
WP Waypoint
WRF World-Referenced Frame
X
XML Extended Mark-up Language
Y
Z
2. Terms and Definitions. Для целей настоящего соглашения используются следующие термины и определения.
Информационные сообщения
Предупреждение, требующее осведомленности экипажа, но не немедленное осознание или немедленное внимание.
Терминал бортовых данных (ADT)
Элемент канала передачи данных состоит из терминала воздушных данных в летательном аппарате и наземного терминала данных (GDT) на земле. Связь между GDT и ADT необходима для взаимодействия уровней 2, 3, 4 и 5.
Воздушная разведка
Сбор информации, представляющей интерес для разведки, путем визуального наблюдения с воздуха или с помощью бортовых датчиков.
Управление воздушным движением (УВД)
Услуга, предоставляемая в целях: а) предотвращения столкновений между воздушными судами и в зоне маневрирования между воздушными судами и препятствиями; и b) ускорение и поддержание упорядоченного потока воздушного движения.
Воздушный транспорт (AV)
Базовая платформа, состоящая из всех необходимых для полета подсистем, но без полезной нагрузки и канала передачи данных.
Передача воздушного судна
Процесс передачи управления воздушным судном от одного контролирующего органа другому.
Предупреждение
Сигнал или комбинация сигналов, которые информируют экипаж о наличии предупреждения, предостережения или рекомендации, а также могут информировать экипаж о характере предупреждения, предостережения или рекомендации.
Allied Data Publication – 3 (ADatP-3)
Система форматирования текста сообщений НАТО (FORMETS) содержит правила, конструкции и словарь для стандартизированных СИМВОЛОВНЫХ ФОРМАТОВ ТЕКСТОВЫХ СООБЩЕНИЙ (MTF), которые можно использовать в как в ручном, так и в компьютерном режиме. FORMETS указан в публикации Allied Data Publication Number 3 (ADatP-3).
Высота над уровнем моря
Расстояние по вертикали до уровня, точки или объекта, рассматриваемого как точка, измеренное от среднего уровня моря. Термины, наиболее важные для полетов БПЛА, следующие: Абсолютная высота: Высота летательного аппарата непосредственно над поверхностью или местностью, над которой он летит. Критическая высота: высота, выше которой самолет или воздушно-реактивная управляемая ракета перестает работать удовлетворительно. T Истинная высота: Высота самолета, измеренная от среднего уровня моря.
Анализ
В использовании разведывательных данных — шаг в фазе обработки оперативного цикла, на котором информация подвергается обзору с целью выявления существенных фактов для последующей интерпретации.
Автоматизированный взлет и посадка
Возможность запуска AV одной командой после планирования и предполетной подготовки и получения разрешения на запуск. Включает в себя освобождение АВ от устройства крепления и полет АВ до первой путевой точки, а также возможность приземлиться и закрепить АВ одной командой после того, как летательный аппарат находится на позиции ворот не ближе 100 м от точки приземления. .
Оценка боевых повреждений (BDA)
Определение воздействия всех воздушных атак на цели (например, бомб, ракет, обстрелов и т. д.).
Байт
Восемь бит.
Кассета
В фотографии — перезаряжаемый контейнер для неэкспонированных или экспонированных сенсибилизированных материалов, который можно снимать с камеры или фотолаборатории в условиях освещения.
Предостережения
] Предупреждение, указывающее на потенциально опасное состояние, требующее немедленного уведомления экипажа, но не немедленных действий.
Химический мониторинг
Непрерывный или периодический процесс определения наличия или отсутствия химического агента.
Классификация
Возможность определения уникальных характеристик контакта, которые позволяют различать военные и коммерческие контакты и определять класс и тип контакта.
Командование и управление
Осуществление власти и руководства должным образом назначенным командиром над назначенными силами при выполнении задачи.
Интерфейс управления и контроля (CCI)
Интерфейс между ядром UCS и внешними системами C4I. Он определяет требования к данным, которые должны быть приняты для связи между ядром UCS и всеми конечными пользователями C4I через общий стандартный интерфейс.
Специальный модуль интерфейса управления и контроля (CCISM)
Преобразование программного и/или аппаратного обеспечения между CCI и несовместимыми системами C4I. Может являться частью конкретной реализации UCS для установления связи между UCS и конкретными «клиентами» системы БПЛА (т. е. одной или несколькими системами C4I). Может варьироваться по сложности от простого транслятора формата или протокола до пользовательского приложения для адаптации типа информации к требованиям C4I.
Информационная система управления и контроля
Интегрированная система, состоящая из доктрины, процедур, организационной структуры, персонала, оборудования, объектов и средств связи, которая обеспечивает органы власти на всех уровнях своевременными и адекватными данными для планирования, руководства и контроля их деятельности.
Универсальность
Элемент взаимозаменяемого характера, который используется двумя или более странами или службами одной страны.
План коммуникаций
Общий план, охватывающий все аспекты коммуникации. Включает план передачи данных.
Совместимость
Пригодность продуктов, процессов или услуг для совместного использования в определенных условиях для выполнения соответствующих требований без возникновения неприемлемых взаимодействий.
Компонент
В логистике — часть или комбинация частей, выполняющая определенную функцию, которая может быть установлена или заменена только как единое целое.
Сжатие
Возможность передачи того же объема данных меньшим количеством бит. Существует множество методов сжатия данных, но лишь некоторые из них стандартизированы. CCITT определил стандартный метод сжатия данных для передачи факсов (стандарт группы 3) и стандарт сжатия для передачи данных через модемы (CCITT V.42 bis ). Кроме того, существуют форматы сжатия файлов, такие как ARC и ZIP. Сжатие данных также широко используется в утилитах резервного копирования, приложениях для работы с электронными таблицами и системах управления базами данных. Некоторые типы данных, такие как растровая графика, могут быть сжаты до небольшой доли их нормального размера.
Концепция операций
Четкое и краткое изложение линии действий, выбранной командиром для выполнения своей миссии.
Снимок сплошной полосы
Снимок полосы местности, на котором изображение остается непрерывным по всей длине вдоль линии полета.
Контролируемое воздушное пространство
Воздушное пространство определенных размеров, в пределах которого обеспечивается диспетчерское обслуживание контролируемых полетов (например, полеты в контролируемом воздушном пространстве требуют одобрения/согласования с контролирующим органом, и некоторые маневры могут быть запрещены или ограничены, или требуют наблюдения).
Core UCS (CUCS)
Предоставляет оператору БПЛА функциональные возможности для выполнения всех этапов миссии БПЛА. Он должен поддерживать требования DLI, CCI и HCI. Также обеспечивает высокое разрешение, сгенерированное компьютером, графическое пользовательское представление, которое позволяет квалифицированному оператору БПЛА управлять различными типами БПЛА и полезными нагрузками.
Контрмеры
Та форма военной науки, которая путем использования устройств и/или методов имеет целью снижение оперативной эффективности деятельности противника.
Оценка повреждений
Определение воздействия атак на цели.
Передача данных
Передача информации между функциональными блоками посредством передачи данных по протоколу.
Канал передачи данных
Средства соединения одного места с другим для передачи и получения данных.
Интерфейс передачи данных (DLI)
Интерфейс между специальным модулем транспортного средства (VSM) и основным элементом UCS. Он обеспечивает стандартные сообщения и форматы для обеспечения связи между различными воздушными транспортными средствами и стандартизированными станциями управления НАТО.
План канала передачи данных
Подробная информация о доступном канале, включая диапазон и частоты, которые будут использоваться. Он связан с путевыми точками на маршруте, а сведения о необходимых действиях доступны для подсказок оператору.
Раздача полезной нагрузки
Объекты, которые высвобождаются из БПЛА в рамках задач миссии БПЛА. Это может включать выпуск оружия или развертывание дистанционного зондирования и т. д.
Электромагнитный спектр
Диапазон частот электромагнитного излучения от нуля до бесконечности.
Средства радиоэлектронной борьбы (РЭБ)
Военные действия по использованию электромагнитного спектра, включающие: поиск, перехват и идентификацию электромагнитных излучений, использование электромагнитной энергии, в том числе направленной энергии, для уменьшения или предотвращения враждебного использования электромагнитных спектра, и действия по обеспечению его эффективного использования дружественными силами.
План аварийного восстановления
В случае сбоев, таких как потеря канала передачи данных, БПЛА должны автоматически выполнять действия по восстановлению, называемые Правилами безопасности (ROS). ROS выбираются на этапе планирования миссии. ROS различаются в зависимости от приоритета, отдаваемого аварийным действиям по сравнению с выполнением миссии. Используя приложение планирования миссии, оператор UCS выбирает соответствующий сценарий безопасности (например, для определения заранее запрограммированного маршрута восстановления).
Кодирование
Преобразование информации или данных из системы, формата или сигнала в другой.
Учения
Военный маневр или имитация операции военного времени, включающая планирование, подготовку и выполнение. Он проводится с целью обучения и оценки. Это могут быть комбинированные, совместные или отдельные учения по обслуживанию, в зависимости от участвующих организаций.
Поле зрения
В фотографии угол между двумя лучами, проходящими через перспективный центр (заднюю узловую точку)) объектива камеры к двум противоположным сторонам формата. Не путать с углом обзора.
Форматированный текст сообщения
Слова, состоящие из нескольких наборов, упорядоченных в определенной последовательности, каждый набор характеризуется идентификатором и содержит информацию определенного типа, закодированную и расположенную в упорядоченной последовательности символьных полей в соответствии с сообщением НАТО правила форматирования текста. Он предназначен для обеспечения как ручной, так и автоматизированной обработки и обработки.
Рамка
В фотографии любая отдельная экспозиция, содержащаяся в непрерывной последовательности фотографий.
Текст сообщения произвольной формы
Слова без установленного формата. Он предназначен для быстрого черчения, а также ручной обработки и обработки.
Функциональная архитектура
Устанавливает следующие функциональные элементы и интерфейсы: • Базовая UCS (CUCS) • Интерфейс передачи данных (DLI) • Интерфейс управления и контроля (CCI) • Специальный модуль транспортного средства ( VSM) • Специальный модуль интерфейса управления и контроля (CCISM)
Fusion
Смешивание разведывательных данных и/или информации из нескольких источников или агентств в связную картину. Тогда происхождение первоначальных отдельных предметов больше не должно быть очевидным.
Наземный терминал данных
Элемент канала передачи данных состоит из терминала данных с воздуха в воздушном транспортном средстве и терминала с наземными данными (GDT), который может быть расположен либо на земле, либо в воздухе (например, самолет управления и контроля). ). Связь между GDT и ADT необходима для взаимодействия уровней 2, 3, 4 и 5.
Передача
Акт передачи управления БПЛА и/или полезной нагрузкой от одной БСК другой БСК и/или передачи управления каналом передачи данных.
Человеко-машинный интерфейс (HCI)
Определения требований к функциям и взаимодействиям, которые UCS должна позволять оператору выполнять. Будет поддерживать любые требования HCI, которые налагаются на CUCS интерфейсом управления и контроля (CCI) и интерфейсом канала передачи данных (DLI). Также будет поддерживать любые специальные или уникальные требования к отображению модуля CCI (CCISM) или модуля для конкретного автомобиля (VSM).
Гиперспектральное изображение (HSI)
Изображение объекта, полученное одновременно с использованием сотен или тысяч дискретных спектральных каналов.
Изображение
Двумерный прямоугольный массив пикселей, индексированный по строке и столбцу.
Изображения
В совокупности изображения объектов, воспроизведенные электронными или оптическими средствами на пленке, электронных устройствах отображения или других носителях.
Использование изображений
Цикл обработки и отображения, сборки в пакеты изображений, идентификации, интерпретации, измерения, извлечения информации, подготовки отчетов (включая аннотированные изображения) и распространения информации.
Интеграция
Относится к объединению сегментов, а не систем, и обеспечению правильной работы сегментов в среде; не оказывать отрицательного влияния друг на друга; и соответствовать стандартам. Интеграция не подразумевает взаимодействия. Он лишь обеспечивает уровень уверенности в том, что система будет работать так, как задумано.
Разведка
Продукт, полученный в результате обработки информации об иностранных государствах, враждебных или потенциально враждебных силах или элементах, или районах реальных или потенциальных операций. Этот термин также применяется к деятельности, результатом которой является продукт, и к организациям, занимающимся такой деятельностью.
Взаимодействие
Односторонний или двусторонний обмен данными между двумя или более системами/подсистемами.
Интерфейс (1)
Концепция, включающая определение взаимосвязи между двумя единицами оборудования или системами. Определение включает в себя тип, количество и функцию соединительных цепей, а также тип, форму и содержание сигналов, которыми обмениваются по этим цепям. Механические детали вилок, розеток, номеров контактов и т. д. могут быть включены в контекст определения. (2) Общая граница (например, граница между двумя подсистемами или двумя устройствами). (3) Граница или точка, общая для двух или более сходных или непохожих систем управления и контроля, подсистем или других объектов, относительно которых или в которых происходит необходимый информационный поток. (4) Граница или точка, общая для двух или более систем или других объектов, через которые происходит поток полезной информации. (Подразумевается, что полезный информационный поток требует определения взаимосвязи систем, которая позволяет им взаимодействовать.) (5) Процесс взаимосвязи двух или более разнородных цепей или систем. (6) Точка взаимосвязи между пользовательским терминальным оборудованием и коммерческими средствами связи.
Оперативная совместимость
Способность сил Североатлантического союза и, при необходимости, сил стран-партнеров и других стран обучать, проводить учения и эффективно действовать вместе при выполнении поставленных миссий и задач.
Совместное
Прилагательное, используемое для описания деятельности, операций и организаций, в которых участвуют элементы как минимум двух служб.
Лазерный целеуказатель
Устройство, испускающее луч лазерной энергии, который используется для обозначения определенного места или объекта.
Лазерный дальномер
Устройство, использующее лазерную энергию для определения расстояния от устройства до места или объекта.
LIDAR
Аббревиатура от Light Detection And Ranging, описывающая системы, использующие световой луч вместо обычных микроволновых лучей для мониторинга атмосферы, отслеживания и обнаружения.
Meaconing
Система приема сигналов радиомаяков и их ретрансляции на той же частоте для создания помех навигации. Измерительные станции вызывают получение неточных пеленгов самолетами или наземными станциями.
Метаданные
Данные о данных. Под этим термином обычно понимаются структурированные данные о ресурсах, которые можно использовать для поддержки описания и обнаружения ресурсов, управления информационными ресурсами (например, для записи информации об их местонахождении и приобретении), управления долговременным сохранением цифровых ресурсов, и за помощь в сохранении контекста и подлинности ресурсов. Может носить технический характер, документируя, как ресурсы относятся к конкретным программным и аппаратным средам, или для записи параметров оцифровки. Короче говоря, любая стандартизированная описательная информация о ресурсах, в том числе нецифровых.
План миссии
Планирование маршрута, планирование полезной нагрузки, планирование канала передачи данных (включая планирование частоты) и планирование аварийного восстановления БПЛА (правила безопасности) для полета БПЛА.
Модульность
Использование подсистем или компонентов одной системы для правильной работы в составе другой системы. Интерфейс на уровне подсистемы достаточно определен.
Движущиеся изображения
Последовательность изображений с метаданными, которые управляются как отдельный объект в стандартном формате движущихся изображений и отображаются как временная последовательность изображений.
Дисплей движущейся карты
Дисплей, на котором символ, представляющий транспортное средство, остается неподвижным, в то время как изображение карты или диаграммы перемещается под символом, так что дисплей имитирует горизонтальное движение автомобиля, на котором он установлен.
Индикатор движущихся целей (MTI)
Представление радара, показывающее только движущиеся цели. Сигналы от неподвижных целей вычитаются из обратного сигнала на выходе подходящей схемы памяти. v Мультиспектральные изображения (MSI)
Изображение объекта, полученное одновременно в нескольких дискретных спектральных диапазонах.
Национальный комитет стандартов передачи (NTSC)
Первая система цветного телевещания была внедрена в США в 1953 году. Она была основана на стандарте NTSC. NTSC используется во многих странах на североамериканском континенте и в Азии, включая Японию. Этот видеостандарт США использует EIA RS-170 и SMPTE 170 M – 19.94 формата. Стандарт применяется к изображениям с метаданными либо в виде скрытых субтитров, либо закодированных с помощью скрытых субтитров. NTSC работает с частотой 525 строк/кадр и 30 кадрами/с с чересстрочной разверткой 2:1. Собственная система Все компоненты, составляющие уникальную систему БПЛА.
Архитектура функциональной совместимости ISR НАТО (NIIA)
Архитектура, которая определяет STANAG, используемые для функциональной совместимости сенсорной системы ISR. Эта архитектура определена в AEDP-2.
Стратегия профиля OSI НАТО (NOSIP) Стратегия функциональной совместимости теперь объединена с NC3TA.
Соглашение о стандартизации НАТО (NATO STANAG) Запись соглашения между несколькими или всеми странами-членами о принятии аналогичного или аналогичного военного оборудования, боеприпасов, припасов и запасов; и оперативные, логистические и административные процедуры. Принятие на национальном уровне публикации союзников НАТО, выпущенной Агентством по стандартизации НАТО (NSA), может быть зафиксировано как соглашение о стандартизации.
Профиль общих стандартов NC3 (NCSP)
Минимальный набор стандартов связи и информационных технологий, обязательный для приобретения всех систем НАТО C3.
Техническая архитектура NC3 (NC3TA)
Техническое, связанное со стандартами представление всеобъемлющей архитектурной структуры NC3.
Почти реальное время
Относится к своевременности данных или информации, которые были задержаны на время, необходимое для электронной связи и автоматической обработки данных. Это говорит о том, что существенных задержек нет.
Сеть
(1) Соединение трех или более взаимодействующих объектов и (обычно) одного или более узлов. (2) Комбинация пассивных или активных электронных компонентов, которая служит определенной цели.
Модель соединения открытых систем
Эта модель определена в ISO/IEC 7498-1.
Боевой порядок
Идентификация, численность, командная структура и расположение личного состава, подразделений и оборудования любых вооруженных сил.
Пассив
В наблюдении прилагательное, применяемое к действиям или оборудованию, которые не излучают энергию, которую можно обнаружить.
Полезная нагрузка
Датчик(и) БПЛА, оружие, мякина, брошюры, бортовые системы и т. д., находящиеся на борту и используемые для выполнения определенной задачи.
План полезной нагрузки
Подробная информация о датчике, который будет использоваться, или о том, какие датчики должны быть загружены, если несколько полезных нагрузок находятся в пределах возможностей БПЛА. В определенных точках на маршруте могут быть заранее запланированные операции датчиков, и их детали должны быть включены в план полезной нагрузки и связаны с путевыми точками на маршруте. Доступный в печатном виде для загрузки полезной нагрузки БПЛА и для отображения вместе с планом маршрута или рядом с ним, в зависимости от сложности системы необходимо включить подсказки действий либо для оператора, либо для БПЛА. Включает конфигурацию полезной нагрузки (например, тип полезной нагрузки и размер объектива), извлечение изображений полезной нагрузки (например, желаемое разрешение) и команды оператора для управления полезными нагрузками как EO/IR, так и SAR (например, настройки масштабирования, угол наклона и фокусировка).
Первичные данные
Данные, полученные непосредственно от датчика.
Первичные изображения
Неиспользованные исходные данные изображений, полученные непосредственно с сенсора. На датчике может быть применена элементарная обработка, а поток данных может включать вспомогательные данные.
Обработанные изображения
Изображения, отформатированные в пиксельный формат изображения, улучшенные для удаления обнаруженных аномалий и преобразованные в формат, подходящий для последующего использования.
Протокол
(1) В целом набор семантических и синтаксических правил, определяющих поведение функциональных блоков при осуществлении связи. Например, протокол канала передачи данных представляет собой спецификацию методов, с помощью которых осуществляется передача данных по каналу данных с точки зрения конкретного режима передачи, процедур управления и процедур восстановления. (2) В многоуровневой архитектуре системы связи — формальный набор процедур, принятых для облегчения функционального взаимодействия в многоуровневой иерархии. Примечание. Протоколы могут управлять частями сети, типами услуг или административными процедурами.
В режиме реального времени
Относится к своевременности данных или информации, которые были задержаны только на время, необходимое для электронной связи. Это означает, что заметных задержек нет.
Разведка
Задача, предпринимаемая для получения путем визуального наблюдения или других методов обнаружения информации о действиях и ресурсах противника или потенциального противника; или для обеспечения данных, касающихся метеорологических, гидрографических характеристик конкретного района.
Спасение
Миссия, которая включает в себя возвращение самолета на базу и включает подход к посадочной платформе и посадку. Если воздушное транспортное средство должно быть убрано после полета, крепление на палубе и обращение с воздушным транспортным средством (AV) также включены.
Разрешение
Измерение мельчайших деталей, которые могут быть различимы сенсорной системой при определенных условиях.
План маршрута
Набор путевых точек, за которыми должен следовать БПЛА, а также общие команды летательного аппарата для вспомогательных систем (например, огни, IFF, противообледенительная система и т. д.) и команды действий в аварийной ситуации. Схемы руления или полета могут быть включены в маршрут либо в виде серии последовательных путевых точек, либо в виде «исходных» путевых точек с информацией о расстоянии и пеленге, что будет зависеть от сложности систем UCS и БПЛА.
Масштабируемость
Характеристика, которая позволяет настраивать размер и возможности системы в зависимости от потребностей пользователя.
Поисково-спасательные операции Использование самолетов, надводных кораблей, подводных лодок, специализированных спасательных групп и оборудования для обнаружения и подъема терпящего бедствие персонала на суше или на море.
Вторичные изображения
Изображения и/или продукты изображений, полученные из первичных изображений или дальнейшей обработки вторичных изображений.
Сенсор
Оборудование, которое обнаруживает и может отображать и/или регистрировать объекты и действия посредством энергии или частиц, испускаемых, отражаемых или изменяемых объектами.
Должен
Обязательное соответствие.
Следует
Рекомендуемое соответствие.
Сигнальная разведка
Общий термин, используемый для описания коммуникационной разведки и электронной разведки, когда нет необходимости различать эти два типа разведки или представлять их слияние.
Программное обеспечение
Набор компьютерных программ, процедур и сопутствующей документации, связанной с работой системы обработки данных (например, компиляторы, библиотечные процедуры, руководства и принципиальные схемы).
STANAG
Термин НАТО, полученный из соглашения о стандартизации. См. Соглашение о стандартизации НАТО.
Стандартизация
Разработка и внедрение концепций, доктрин, процедур и проектов для достижения и поддержания требуемых уровней совместимости, взаимозаменяемости или общности в оперативной, процедурной, материальной, технической и административной областях для достижения функциональной совместимости.
Хранение
а) Хранение данных в любой форме, обычно с целью упорядоченного поиска и документирования. б) Устройство, состоящее из электронных, электростатических или электрических аппаратных средств или других элементов, в которые можно вводить данные и из которых данные могут быть получены.
Наблюдение
Систематическое наблюдение за аэрокосмическими, наземными или недрами, местами, людьми или вещами с помощью визуальных, слуховых, электронных, фотографических или других средств.
Радар с синтезированной апертурой (SAR)
Система, использующая частотные сдвиги, связанные с движением датчика (доплеровский сдвиг), для создания изображения с более высоким разрешением, чем было бы доступно только с шириной луча радиолокационной системы. и длительность импульса. Это требует сложной обработки данных после сбора данных радара. Дополняет возможности фотографических и других оптических изображений из-за минимальных ограничений по времени суток и атмосферным условиям, а также из-за уникальной реакции местности и культурных объектов на радиолокационные частоты.
Архитектура системы
Определяет физическое соединение, расположение и идентификацию ключевых узлов, цепей, сетей, боевых платформ и т. д., связанных с обменом информацией, и определяет параметры производительности системы. Создан для удовлетворения требований операционной архитектуры в соответствии со стандартами, определенными в технической архитектуре.
Цель
а) Географический район, комплекс или объект, планируемый для захвата или уничтожения вооруженными силами. b) При использовании разведывательными данными — страна, район, объект, учреждение или лицо, против которых направлены разведывательные операции.
Обнаружение цели
Обнаружение, идентификация и определение местоположения цели с достаточной точностью для эффективного применения оружия. Все чаще применяется к разведке в качестве объекта (объектов) поиска и определения местоположения, будь то предоставление разведывательных данных или непосредственное указание систем вооружения.
Целеуказание
Возможность сообщать о местоположении (может включать скорость и направление) цели, обнаруженной с помощью полезной нагрузки AV. Положение цели сообщается с точки зрения широты и долготы (может включать высоту) или относительно точки. Информация о местоположении цели является достаточно точной для обеспечения требований к управлению огнем системы вооружения.
Техническая архитектура
Минимальный набор правил, регулирующих расположение, взаимодействие и взаимозависимость частей или элементов, целью которых является обеспечение того, чтобы совместимая система удовлетворяла определенному набору требований. Он идентифицирует системные службы, интерфейсы, стандарты и их отношения. Он обеспечивает основу, на основе которой могут быть получены технические спецификации, направляющие внедрение систем. Проще говоря, это «строительные нормы и законы о зонировании», определяющие интерфейс и стандарты функциональной совместимости, информационные технологии, безопасность и т. д.
Отслеживание
Точное определение местоположения и обновление позиций целей (в терминах географических координат) с помощью радиолокационных, оптических или других средств.
Необитаемый летательный аппарат/беспилотный летательный аппарат (БПЛА)
Самоходный летательный аппарат, на борту которого нет человека-оператора, который использует аэродинамические силы для обеспечения подъемной силы транспортного средства, может летать автономно или управляться дистанционно, может быть одноразовым или ремонтируемым , и может нести летальную или нелетальную полезную нагрузку.
Система БПЛА
Включает летательные аппараты, модульную полезную нагрузку, каналы передачи данных, оборудование для запуска и восстановления, станции планирования миссии и управления, станции обработки данных и материально-техническую поддержку.
Система управления БПЛА (UCS)
Функциональный набор, отвечающий за управление БПЛА и взаимодействие с C4I, полезной нагрузкой БПЛА и оператором(ами) системы БПЛА. Включает в себя все системы управления БПЛА и включает в себя систему запуска и восстановления.
Текстовый формат сообщений США (USMTF)
Фиксированный формат, текстовые сообщения, которые могут быть прочитаны человеком и обработаны машиной.
Переменный формат сообщений (VMF)
Используется между системами, требующими переменные бит-ориентированные сообщения.
Специфическая информация о транспортном средстве
Информация, отправляемая воздушному транспортному средству или с него, которая не содержится в основном общем наборе сообщений DLI.
Специальный модуль автомобиля (VSM)
Функция, которая находится между DLI и подсистемой летательного аппарата. Облегчает соответствие этому STANAG, выступая в качестве моста между стандартными форматами данных и протоколами DLI и конкретным воздушным транспортным средством.
Видеоизображения
Последовательность изображений с метаданными, которая собирается как синхронизированная последовательность изображений в стандартном формате движущихся изображений, управляется как отдельный объект в стандартном формате движущихся изображений и отображается как последовательность изображений. Видеоизображение является подмножеством класса движущихся изображений.
Предупреждения
Предупреждение, указывающее на опасную ситуацию, требующую немедленных действий для предотвращения гибели людей, повреждения оборудования или провала миссии.
Точка маршрута
Точка на маршруте БПЛА, определяемая широтой/долготой.