
Как управлять вертолетом: техника | Журнал Популярная Механика
О тонкостях управления вертолетом Robinson R44 рассказывает старший тренер вертолетного клуба «Аэро-союз» Сергей Друй.
Ручка управления определяет циклический шаг несущего винта. С ее помощью пилот управляет вертолетом по крену и тангажу. Работа с ручкой управления во время висения напоминает балансирование на острие иглы. Практически каждое действие требует соответствующей коррекции другими органами управления. К примеру, чтобы увеличить скорость, пилот отдает ручку от себя, наклоняя машину вперед. При этом вертикальная составляющая в векторе тяги винта уменьшается, и приходится увеличивать общий шаг (поднимать рычаг «шаг-газ»), чтобы не потерять высоту.
 1.Ручка управления. 2. Рычаг «шаг-газ». 3.Педали. 4. Управление связью. 5.Компас.
1.Ручка управления. 2. Рычаг «шаг-газ». 3.Педали. 4. Управление связью. 5.Компас.
Шаг-газ. Поднимая рычаг «шаг-газ», пилот увеличивает общий шаг (угол атаки лопастей) несущего винта, тем самым увеличивая тягу. В случае резкого увеличения шага реактивный момент винта изменяется, и вертолет стремится изменить курс. Чтобы остаться на выбранной траектории, пилот синхронно работает рычагом «шаг-газ» и педалями.
Педали определяют шаг стабилизирующего («хвостового») винта. С их помощью пилот управляет курсом машины. Резкая работа педалями сказывается на реактивном моменте стабилизирующего винта и, несмотря на его незначительную массу, оказывает некоторое влияние на тангаж. «Опытные тренеры иногда показывают курсантам фокус, зафиксировав ручку управления и «шаг-газ» и управляя высотой и скоростью полета, лишь слегка помахивая хвостом, — рассказывает Сергей Друй, — так появляются слухи о «радиоуправляемых вертолетах» и прочей магии».
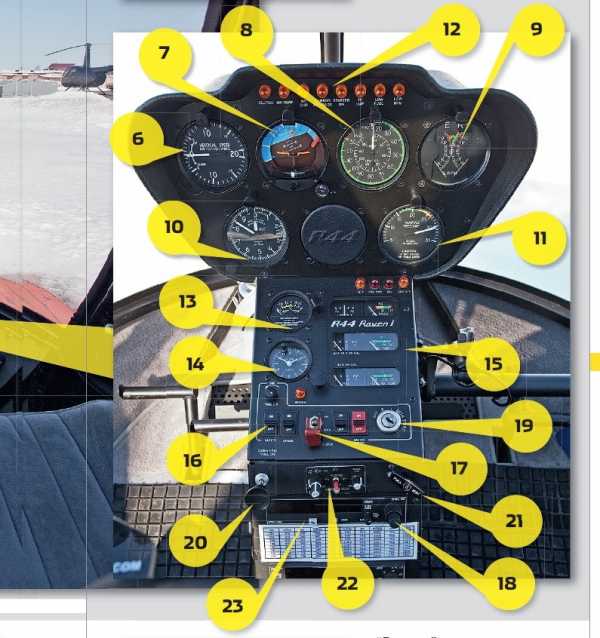 6.Вариометр (указатель вертикальной скорости). 7.Авиагоризонт. 8. Индикатор воздушной скорости. 9. Тахометр (слева — указатель оборотов двигателя, справа — винта). 10.Высотомер. 11. Указатель давления во впускном коллекторе (дает представление о запасе мощности двигателя при данной загрузке и погодных условиях). 12. Сигнальные лампы. 13. Температура воздуха во впускном тракте. 14.Часы. 15. Приборы двигателя (давление и температура масла, уровень топлива, напряжение бортовой сети). 16. Управление освещением. 17. Выключатель силового привода муфты (передает крутящий момент на винт после прогрева двигателя). 18. Главный выключатель. 19. Выключатель зажигания. 20. Обогрев кабины. 21. Вентиляция кабины. 22. Микшер внутренней связи. 23.Радиостанция.
6.Вариометр (указатель вертикальной скорости). 7.Авиагоризонт. 8. Индикатор воздушной скорости. 9. Тахометр (слева — указатель оборотов двигателя, справа — винта). 10.Высотомер. 11. Указатель давления во впускном коллекторе (дает представление о запасе мощности двигателя при данной загрузке и погодных условиях). 12. Сигнальные лампы. 13. Температура воздуха во впускном тракте. 14.Часы. 15. Приборы двигателя (давление и температура масла, уровень топлива, напряжение бортовой сети). 16. Управление освещением. 17. Выключатель силового привода муфты (передает крутящий момент на винт после прогрева двигателя). 18. Главный выключатель. 19. Выключатель зажигания. 20. Обогрев кабины. 21. Вентиляция кабины. 22. Микшер внутренней связи. 23.Радиостанция.
Распределение внимания
Важнейший навык управления вертолетом — правильный выбор направления взгляда. Курсантов учат взлетать и садиться, глядя на землю на расстоянии 5−15 м перед собой. Это простая геометрия. Если смотреть дальше, вплоть до линии горизонта, можно не заметить значительных колебаний высоты. Спортсмены-вертолетчики смотрят прямо «под обрез кабины» и замечают миллиметровые изменения высоты. Если курсант выберет то же направление взгляда, он увидит небольшие колебания, но будет не в силах их скорректировать — не хватит навыков и мелкой моторики, которая приходит с опытом. Поэтому при обучении тренер предлагает курсанту начать со взгляда на 15 м, а затем постепенно сокращать эту дистанцию.
 «Вентиль» на центральном тоннеле заведует фрикционом ручки управления. С его помощью пилот может увеличивать сопротивление на ручке вплоть до полной ее фиксации. Эта функция помогает в долгих маршрутных полетах.
«Вентиль» на центральном тоннеле заведует фрикционом ручки управления. С его помощью пилот может увеличивать сопротивление на ручке вплоть до полной ее фиксации. Эта функция помогает в долгих маршрутных полетах.
Базовое направление взгляда в полете по маршруту — «капот-горизонт». Если положение горизонта относительно капота не меняется, значит, вертолет летит на заданной высоте с постоянной скоростью. «Клевок», скорее всего, будет означать увеличение скорости и потерю высоты, наклон линии горизонта — смену курса. «В хорошую погоду можно лететь с заклеенной приборной панелью, — говорит Сергей Друй, — а вот с заклеенными стеклами кабины далеко не улетишь».

Шаг или газ?
На большинстве современных вертолетах есть автоматика, которая регулирует подачу топлива в двигатель так, чтобы удерживать обороты несущего винта в узком рабочем диапазоне. Поворачивая рукоятку рычага «шаг-газ», пилот может самостоятельно управлять подачей топлива. В полете пилот может чувствовать, как рукоятка сама слегка поворачивается в руке — это работает автомат. Бывает, что новички в напряжении сжимают рукоятку, мешая автомату работать, и раздается звуковой сигнал, предупреждающий о падении оборотов.
Авторотация
Режим авторотации, при котором винт с малым углом атаки вращается, используя энергию набегающего воздушного потока, позволяет при необходимости выбрать место посадки и сесть с выключенным двигателем. Чтобы поддерживать режим, пилот смотрит на тахометр. Если обороты винта падают ниже рабочего диапазона, нужно плавно уменьшить общий шаг винта. Если обороты растут, общий шаг нужно увеличить. При этом вертолет остается полностью управляемым по курсу, крену и тангажу.
www.popmech.ru
Управление вертолетом видео. Управление двигателем вертолета.
Разберем управление вертолетом с одним несущим винтом и с одним рулевым винтом. Летчик управляет вертолетом и двигателем в полете, воздействуя на несущие рулевой винты.
В кабине летчика имеются ручки, рычаги и педали, связанные тросами «ли жесткими тягами с соответствующими органами управления вертолета. Кроме того, кабина летчика снабжена приборным и пилотажно-навигационным оборудованием, с помощью которого летчик контролирует работу двигателя, а также скорость, высоту и направление полета вертолета.
Как известно, для управления самолетом изменяют величины, направление и точки приложения аэродинамических сил, возникающих на крыле и на рулях, а также изменяют величину силы тяги.
Чтобы самолет мог лететь с набором высоты, летчик увеличивает тягу двигателя и отклоняет ручку управления на себя, что вызывает отклонение руля высоты вверх. При этом на руле высоты создается сила, которая изменяет направление полета, самолет поднимает нос, что вызывает увеличение угла атаки крыла. Увеличение угла атаки крыла соответствует увеличению подъемной силы крыла, при увеличении силы тяги самолет набирает высоту.
Управление вертолетом видео
Чтобы создать крен, летчик отклоняет ручку управления самолетом в требуемую сторону, это ведет к отклонению элеронов крыла. Один элерон отклоняется вверх, а другой — вниз, в результате чего левая и правая половины крыла создают различной величины подъемные силы и самолет накреняется.
Для изменения скорости полета летчик сектором газа изменяет количество оборотов двигателя, или, что-то же самое, изменяет величину тяги винта или реактивного двигателя.
Если на самолете имеется воздушный винт изменяемого в полете шага, то для изменения шага винта в кабине имеется рычаг управления шагом винта, который обычно связывается с рычагом газа, так как шаг винта и газ двигателя должны быть между собой согласованы.
Чтобы управление вертолетом сделать похожим на управление самолетом, в кабине вертолета также имеются ручка управления, ножные педали, рычаг управления общим шагом винта и рычаг газа; однако они связаны уже не с теми органами, что на самолете, так как на вертолете нет крыла, ни элеронов, ни руля направления.
Ручка управления вертолетом связана тросами и тягами с механизмами продольного и поперечного управления автомата-перекоса на несущем винте.
Ножные педали соединены тросами или тягами с механизмом изменения установочных углов лопастей рулевого винта.
Рычаг управления общим шагом несущего винта соединен с ползуном автомата-перекоса.
Рычаг газа соединен тягами с дроссельной заслонкой карбюратора двигателя.
Управление вертолетом видео
Обычно управление общим шагом несущего винта и газом двигателя объединяют на одном рычаге, который в этом случае называется рычагом «шаг-газ». Дело в том, что изменение шага несущего винта, т. е. одинаковое изменение установочного угла всех лопастей винта, неизбежно вызывает увеличение или уменьшение мощности, потребной для вращения винта с неизменным числом оборотов. Несоответствие между мощностью, развиваемой двигателем, и мощностью, потребной для вращения винта, может привести к падению числа оборотов винта или чрезмерной раскрутке его, что влечет за собой невозможность продолжения полета. Управление шагом винта и газом объединено на одном рычаге таким образом, чтобы мощность двигателя всегда была приближенно равна мощности, потребляемой винтом. Для окончательной регулировки их на рычаге «шаг-газ» предусматривается рукоятка коррекции газа двигателя, позволяющая производить в небольших пределах изменение мощности двигателя без изменения шага винта.
За счет чего же вертолет перемещается вперед, в стороны и назад?
Если спросить об этом у конструктора, то он ответит: «За счет циклического изменения шага лопастей по азимуту».
А если задать вопрос, что же такое «циклическое изменение по азимуту», то последует разъяснение: «Это — синусоидальное изменение углов атаки лопастей в зависимости от их азимутального положения».
Это правильно? Безусловно. А понятно? Не очень. Разберемся, что это значит.
Для того чтобы из положения висения перевести вертолет в горизонтальный полет вперед, назад или в сторону, необходима сила, направленная в эту сторону. А как получить такую силу, которую по желанию можно было бы не только изменять по величине, но изменять по направлению.
Можно, конечно, поставить под фюзеляж еще один двигатель с воздушным винтом, который бы поворачивал вертолет в любом направлении.
А можно сделать значительно проще: использовать силу, уже имевшуюся на висящем вертолете, а именно — аэродинамическую силу несущего винта, которая при висении проходит вдоль оси винта.
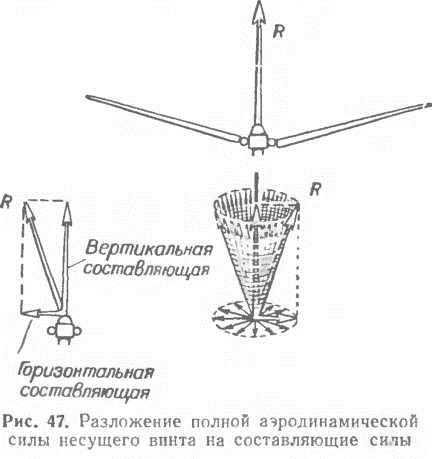
Если изменить положение этой силы (наклонить ее) по сравнению с ее исходным вертикальным положением, то ее можно разложить на две составляющие силы: вертикальную и горизонтальную.
Горизонтальная составляющая и будет той силой, которая перемещает вертолет в желаемом направлении, а вертикальная составляющая будет по-прежнему выполнять роль подъемной силы. В зависимости от того, в какую сторону наклонить аэродинамическую силу винта, в ту сторону и может совершаться движение вертолета. Чем больший наклон будет иметь аэродинамическая сила, тем больше будет ее горизонтальная составляющая и тем большую скорость сможет развить вертолет в заданном направлении.
Итак, искомая сила найдена. Остается только найти способ наклонять эту силу в требуемом направлении и на необходимую величину.
Казалось бы, простейшим способом изменять наклон аэродинамической силы винта является наклон самой оси несущего винта, а значит, и всей плоскости его вращения в требуемую сторону. Эта кажущаяся очень простой схема управления была впервые применена на автожирах. Она называется схемой непосредственного управления. Принцип непосредственного управления показан.

Передвинув ручку управления вертолетом вперед, летчик тем самым посредством пары зубчатых колес наклоняет вперед всю втулку крепления лопастей несущего винта, а вместе с тем и изменяет положение плоскости вращения несущего винта. При этом полная аэродинамическая сила его будет иметь горизонтальную составляющую, направленную вперед, и вертолет начнет движение в этом направлении. Таким образом, движению ручки управления вертолетом вперед будет соответствовать и движение вперед самого вертолета.
Однако изменять угол наклона плоскости вращения несущего винта на вертолете нелегкое дело, так как огромная плоскость вращения несущего винта является как бы ротором гироскопа, который стремится сохранить плоскость своего вращения. Кроме того, трудность представляет собой выполнение разрезного главного вала для обеспечения наклона втулки.
Изобретенный Б. Н. Юрьевым автомат-перекос, включенный в управление несущим винтом вертолета, лопасти которого имеют горизонтальные шарниры, позволяет достигать такого же эффекта, как и при наклоне плоскости вращения винта, но другим, более легким способом.
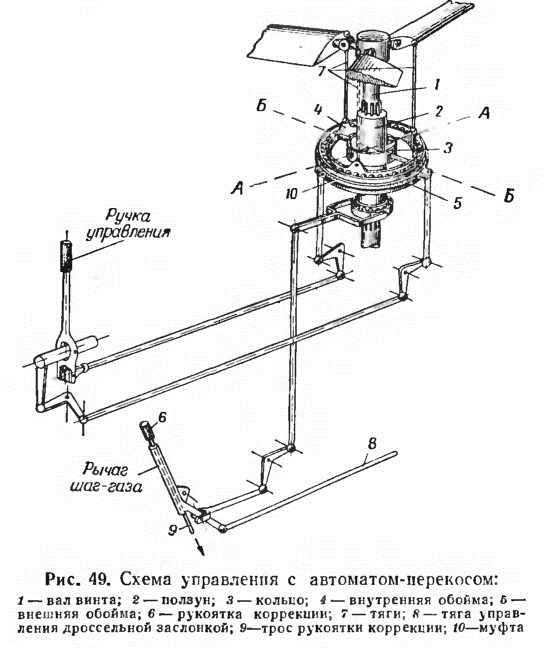
Принципиальная схема управления винтом с помощью автомата-перекоса изображена.
На валу винта имеется ползун. Ползун соединен с валом продольными шлицами, которые передают ползуну вращение вала. Кроме того, наличие продольных шлиц дает возможность перемещать ползун вдоль вала вниз и вверх, при этом внешняя обойма 5 перемещается в муфте.
С ползуном осью А—А связано кольцо, а с кольцом осью Б—Б связана внутренняя обоина автомата-перекоса. Таким образом, и кольцо, п внутренняя обойма тоже вращаются вместе с валом несущего винта. Кольцо может наклоняться вправо и влево, а внутренняя обойма, кроме наклона вправо и влево вместе с кольцом, может быть на оси Б—Б наклонена вперед и назад. Вследствие наличия шарикоподшипниковой связи наклоны внешней обоймы 5 вместе с муфтой будут вызывать наклоны внутренней обоймы, но внешняя обойма не будет вращаться, так как вращение вала винта через шарикоподшипник передаваться на нее не будет.
Управление вертолетом видео
Внешняя обойма тарели автомата-перекоса через муфту посредством тяг со сферическими наконечниками
п качалок связана с ручкой управления. Ползун связан с рычагом «шаг-газ».
На внутренней обойме автомата-перекоса имеются выступы. Число выступов соответствует числу лопастей винта. В данном случае их три. Тяги соединяют внутреннюю обойму с лопастями винта. Таким образом, наклон внешней и внутренней обоймы заставит все три лопасти изменить свои установочные углы вокруг осевых шарниров.
Если летчик отклонит ручку управления вертолетом вперед, то он тем самым заставит наклониться вперед (вокруг оси Б—Б) обе обоймы автомата-перекоса, а вместе с этим изменят свои установочные углы и все лопасти несущего винта. Теперь, когда обоймы наклонены вперед, во время вращения винта каждая лопасть, проходя над ручкой летчика (угол азимута 180), будет автоматически уменьшать свои установочный угол, а проходя над хвостовой балкой (угол азимута 0° или 360°), будет увеличивать свой установочный угол. Естественно, что при уменьшении установочного угла уменьшится и подъемная сила лопасти, в результате чего лопасть опустится. Там, где установочный угол увеличится, там увеличится и подъемная сила, и лопасть совершит взмах.
Таким образом, при отклонении ручки управления вертолетом вперед каждая лопасть, проходя над ручкой управления (угол азимута 180°), опустится, а проходя над хвостовой балкой, приподнимется. Это равносильно тому, что наклонился вперед конус лопастей. Поскольку можно считать, что полная аэродинамическая сила винта совпадает с осью конуса, т. е. перпендикулярна плоскости вращения концов лопастей, то наклон конуса вперед означает также, что вперед наклонилась, и линия действия силы, развиваемой винтом. А это значит, что появилась горизонтальная составляющая силы, обеспечивающая движение вертолета вперед.
Если при нейтральном положении ручки управления вертолет висел, то теперь, при отклонении ручки вперед, вертолет начнет движение вперед.

Если до отклонения ручки вперед полная аэродинамическая сила несущего винта R проходила через центр тяжести вертолета, то теперь она проходит сзади центра тяжести, в результате чего возникает момент относительно центра тяжести, заставляющий вертолет опускать нос. Опускание — это будет продолжаться до тех пор, пока линия действия силы R снова не совпадет с центром тяжести.
Итак, благодаря наклону автомата-перекоса лопасть не сохраняет постоянного установочного угла, а значит, и не сохраняет постоянного угла атаки. При угле азимута 0° (лопасть проходит над хвостовой балкой) угол атаки наибольший; -при движении от угла азимута 0 до 180° (лопасть направлена вперед) угол атаки уменьшается, а затем начинает увеличиваться и при угле азимута 360° снова доходит до максимального значения. А это и есть циклическое изменение углов атаки лопасти в зависимости от ее азимутального положения.
Так создается на современном вертолете наклон конуса лопастей и сила, двигающая вертолет в избранном направлении.
Для полета назад ручка управления вертолетом должна быть отклонена на себя, за нейтральное положение.
Полет вбок, например вправо, требует отклонить ручку управления вертолета вправо от нейтрального положения. Вследствие этого автомат-перекос увеличивает установочный угол лопастей, ометающих левую часть диска, за счет чего на этом участке увеличивается их подъемная сила и лопасти взмахивают, и, наоборот, уменьшает установочный угол лопастей, ометающих правую часть диска, где лопасти опускаются. Весь конус лопастей оказывается таким образом наклоненным вправо. Появляется горизонтальная составляющая сила винта, направленная вправо, которая и служит причиной перемещения вертолета в этом направлении.
Если при висении аэродинамическая сила винта проходила через центр тяжести, то теперь она проходит левее центра тяжести. Появившийся момент наклоняет фюзеляж вертолета вправо до тех пор, пока линия действия силы не совпадет с центром тяжести. Поэтому полет вправо сопровождается наклоном фюзеляжа вправо.

Следует, однако, заметить, что наклон аэродинамической силы несущего винта не повторяет в точности наклона автомата-перекоса. В самом деле, пусть автомат-перекос наклонен назад, конус несущего винта также будет наклонен назад. Однако в этом случае происходит нежелательное изменение углов атаки у наступающей и отступающей лопастей, так как наклон винта назад неизбежно меняет тот угол, с которым встречают поток лопасти, проходя навстречу потоку или уходя от потока. Угол атаки наступающей лопасти увеличится, а отстающей уменьшится. Это вносит изменение в маховое движение лопастей, благодаря чему образуется угол отставания аэродинамической силы винта от того направления, в котором отклонен автомат-перекос.
Желательно, однако, чтобы аэродинамическая сила несущего винта строго подчинялась движению ручки управления вертолетом. Для этого передача от ручки управления к автомату-перекосу выполняется таким образом, чтобы автомат-перекос отклонялся несколько иначе, чем ручка, но зато наклон аэродинамической силы строго соответствовал бы наклону ручки управления вертолетом.
Если отклонение ручки управления вертолетом изменяет наклон линии действия подъемной сипы, развиваемой несущим винтом, то рычаг «шаг-газ» служит для изменения величины этой силы.
Когда рычаг «шаг-газ» отклоняется назад на себя, то ползун скользит вверх по шлицам и заставляет все три лопасти увеличить установочный угол. В результате этого происходит увеличение подъемной силы каждой лопасти, а значит, и увеличение полной аэродинамической силы всего винта. Если рычаг «шаг-газ» отклоняется вперед от себя, то сила винта уменьшается.
Когда аэродинамическая сила ввита становится больше силы веса, то висящий вертолет отвесно набирает высоту. Когда аэродинамическая сила винта становится меньше силы веса, то вертолет совершает вертикальный спуск. Когда аэродинамическая сила винта равна силе веса, то вертолет висит на одной высоте.
Показано, насколько увеличивается потребная мощность для вращения несущего винта (среднего размера) в зависимости от увеличения установочного угла при постоянных оборотах 250 о6\мин.
Схематически показано управление шагом рулевого винта.

Отклонение правой или левой педали через тросовое управление передается «а червячный механизм рулевого винта. Движение педалей заставляет вращаться червячную гайку. При этом червяк вывертывается или ввертывается. С червяком связаны тяги, идущие к рычагам лопастей. Движение червяка через рычаги передается на лопасти несущего винта, благодаря чему они поворачиваются в осевых шарнирах. При этом изменяется их общий установочный угол, а, следовательно, и тяга рулевого винта.
При висении вертолета или при прямолинейном полете тяга рулевого винта должна уравновешивать реактивный момент несущего винта.
Если вертолет необходимо повернуть вправо или влево, то движение педалей увеличивает или уменьшает шаг рулевого винта. В одном случае тяга становится больше, а в другом случае меньше той величины, которая необходима для уравновешивания реактивного момента несущего винта. Вертолет при этом разворачивается или под действием момента тяги рулевого винта, или под действием реактивного момента.
Отказ рулевого винта (например, из-за поломки хвостового вала трансмиссии) вызывает повороты вертолета под действием ничем не уравновешенного реактивного момента, например, на режиме висения вертолет делал бы несколько десятков оборотов в минуту вокруг вертикальной оси, что исключало бы возможность продолжения полета. Поэтому хвостовой вал, как и вся трансмиссия, изготовляется с большим запасом прочности.
При помощи органов управления на вертолете возможно совершать необходимые эволюции. Вертолет может летать с различными горизонтальными скоростями; он может как из горизонтального полета, так и с режима висения перейти на набор высоты или спуск, может крутиться на одном месте вокруг вертикальной оси, может быстро набирать скорость и быстро останавливаться, может совершать виражи и спирали. Вертолет остается полностью управляемым и в том случае, когда откажет двигатель. При этом самовращающийся несущий винт через трансмиссию передает вращение п на рулевой винт.
Для выполнения всех этих эволюций требуется координированное действие ручкой управления вертолетом, рычагом «шаг-газ» и ножными педалями.
Агрегаты техники
avia.pro
Цилиндр управления фрикционом ручки ШАГ-ГАЗ. — КиберПедия
Цилиндр управления фрикционом ручки ШАГ-ГАЗ обеспечивает бесступенчатое отклонение ручки на любой угол в пределах рабочего диапазона. В качестве гидроцилиндра используется расточка в оси крепления ручки ШАГ- ГАЗ. В цилиндре установлен свободно плавающий поршень с уплотнительными кольцами(см. Приложение №13). При подаче жидкости в цилиндр поршень, перемещаясь, через промежуточный плунжер действует на тарелку, которая отжимает пружины, расстопоривая ручку.
Подача жидкости в цилиндр производится включением электромагнитного крана ГА-192Т путем нажатия кнопки на ручке ШАГ-ГАЗ. При выключении крана полость под поршнем через кран ГА-192Т сообщается со сливом в бак. Усилием сжатых пружин жидкость выдавливается на слив, и ручка застопоривается.
Гидравлический упор.
Гидравлический упор предназначен для загрузки на земле ручки управления дополнительным усилием 12+3 кгс/см² при отклонении ее назад за пределы, соответствующие положению наклона тарелки автомат перекоса назад на угол 2°±12/.
Гидроупор установлен на стенке шпангоута 5Н и закреплен на кронштейн болтами против нижнего плеча верхней угловой качалки продольного управления. Он состоит из(см.Приложение№14): цилиндра, изготовленного вместе со штуцером, поршня со штоком, регулируемого винтового упора и буксы с уплотнительными кольцами. Винтовой упор ввернут в резьбовую расточку штока поршня и зафиксирован контргайкой.
Включение гидроупора производится механизмами, установленными на штоках камер низкого давления главных стоек шасси. Каждый из механизмов состоит из микровыключателя, коромысла с толкателем и пружины. При необжатом штоке камеры низкого давления амортизаторов тарелка автомата перекоса способна отклоняться назад на угол , что характерно для управления вертолетом в полете. После посадки вертолета шток камеры низкого давления амортизаторов обживается, и шлиц-шарнир складывается. При этом он через толкатель 9 поворачивает коромысло, которое освобождает концевой выключатель, в результате чего подается питание на электромагнитный кран ГА-192Т. Последний срабатывает и подает жидкость в цилиндр гидроупора. Под давлением гидрожидкости поршень перемещается, и винтовой упор через ролик качалки ограничивает диапазон ее поворота, а следовательно, и отклонение тарелки автомата перекоса назад на угол 2°+12′. Ограничение отклонения тарелки автомата перекоса назад препятствует удару лопастей несущего винта о хвостовую балку при посадке вертолета с большим утлом кабрирования. При необходимости увеличения угла наклона тарелки автомата перекоса назад на ручку управления необходимо приложить усилие не менее 12±3 кгс/см².
При отрыве вертолета от земли и выходе штоков амортизаторов шлиц-шарнир распрямляется, освобождая коромысло, которое с помощью пружины поворачивается и нажимает на концевой выключатель. При этом кран ГА-192Т выключается, и жидкость усилием от ручки управления выжимается из цилиндра гидроупора через кран и дозатор.
Гидроусилители.
Комбинированные гидроусилители КАУ-30Б и РА-60Б установлены в системе управления вертолетом и предназначены для снятия нагрузок с командных рычагов управления. На вертолете установлены три гидроусилителя КАУ-30Б в системах продольного, поперечного управлений и управления общим шагом несущего винта и один гидроусилитель РА-60Б в системе путевого управления. Все четыре гидроусилителя шарнирно монтируются в опорах, закрепленных шпильками на общем кронштейне, установленном на главном редукторе. Опоры имеют подшипники, в которых агрегат может осуществлять угловое перемещение в плоскости, перпендикулярной оси цапф. Входная качалка каждого гидроусилителя соединена с тягой проводки управления, идущей от командных рычагов управления. Штоки силовых цилиндров соединены с качалками продольно-поперечного управления и рычагом общего шага автомата перекоса, а шток РА-60Б соединен с качалкой сектора путевого управления. Шлиц-шарниры удерживают гидроусилители от радиальных поворотов. Посредством штепсельных разъемов гидроусилители подсоединены к электрическим цепям автопилота, а с помощью гибких шлангов соединены с гидросистемой вертолета. Ручное управление вертолетом с помощью гидроусилителей сводится к перемещению их золотников при отклонении командных рычагов управления. Штоки силовых цилиндров гидроусилителей через систему проводки управления изменяют наклон тарелки автомата перекоса или шаг рулевого винта со скоростью, пропорциональной скорости движения рычагов управления, и в направлении, соответствующем их отклонению. При остановке рычагов прекращается и перемещение управляемых органов.
На комбинированные режимы управления гидроусилители переключаются сигнальным давлением, поступающим от электромагнитных кранов ГА-192Т, и работают как от ручного управления, так и от сигналов автопилота в ограниченном диапазоне. При автоматической стабилизации вертолета от сигналов автопилота штоки гидроусилителей могут перемещаться в пределах 20% от полного хода штока. При этом рычаги управления остаются неподвижными, так как ручка продольно-поперечного управления фиксируется механизмами ЭМТ-2М, а ручка ШАГ-ГАЗ стопорится фрикционом. Гидроусилитель РА-60Б обеспечивает возможность медленной автоматической перегонки педалей управления в пределах полного диапазона их отклонения в случаях, когда потребный диапазон отклонения путевого управления для стабилизации превышает 20% его полного хода.
Гидроусилитель КАУ-30Б.
Гидроусилитель является гидроэлектромеханическим силовым агрегатом со следящей системой управления. При ручном управлении работа агрегата осуществляется по гидромеханическому принципу, а при комбининованном (когда гидроусилитель работает одновременно от ручного управления и от сигналов автопилота) — по гидроэлектромеханическому принципу.
Гидроусилительи клапан переключения поступает в канал А, а затем в среднюю проточку распределительного золотника ручного управления(см. Приложение №15). В случае отказа основной гидросистемы и включения дублирующей клапан 2 переключения давлением жидкости перемещается в противоположную сторону, и гидроусилитель переходит на питание от дублирующей системы. Из канала А жидкость параллельно поступает к клапану кольцевания силового цилиндра, распределительному клапану автопилотного управления и редукционному клапану. Давлением жидкости шарики клапана кольцевания прижимаются к своим седлам, которые разъединяют каналы В и Г, сообщающиеся с полостями силового цилиндра каналами М и Н. При отклонении ручки управления в ту или другую сторону через качалку соответственно перемещается и золотник. При этом жидкость из средней кольцевой проточки золотника поступает через каналы Д, В, М или каналы Е, Г, Н в одну из полостей силового цилиндра и перемещает исполнительный шток с необходимым усилием вправо или влево. Одновременно жидкость из противоположной полости силового цилиндра вытесняется в сливную магистраль через каналы Н, Г, Е, Б или через каналы М, В, Д, Б в зависимости от положения золотника. Движение распределительного золотника происходит до того момента, пока не остановится командный рычаг. При этом золотник ручного управления остановится, а головка вместе с исполнительным штоком продолжит движение до тех пор, пока буртиками золотника не перекроются каналы Д и Е. В результате этого жидкость в полостях силового цилиндра будет заперта, а шток зафиксирован вместе с проводкой управления вертолетом, идущей от гидроусилителя к автомату перекоса. При комбинированном управлении гидроусилитель работает от сигналов автопилота или одновременно от автопилота и ручного управления. Включение комбинированного управления производится посредством одновременной подачи сигнала на включение автопилота и электромагнитного крана ГА-192Т, который срабатывает и подает жидкость под давлением через штуцер V и клапан включения в канал для включения гидроусилителя на режим комбинированного управления. По каналу жидкость поступает к клапану кольцевания, который разобщает полости цилиндра комбинированного управления, и к плунжеру для расстопоривания штока с поршнем комбинированного управления. При этом головка агрегата получает возможность перемещаться относительно штока в пределах хода поршня в цилиндре комбинированного управления.
При подаче сигнала от автопилота в одну из обмоток поляризованного реле якорь поворачивается и через толкатель и пружину перемещает влево или вправо от нейтрального положения управляющий золотник. Камера Л соединяется с линией подачи или слива, что вызывает перепад давлений в камерах Л и К. Под действием неуравновешенных сил распределительный клапан следует за золотником, т. е. повторяет его движения.
При перемещении распределительного клапана вправо жидкость из канала А через кольцевую канавку клапана и канал С поступит в левую полость цилиндра комбинированного управления. Одновременно правая полость этого цилиндра через канал Т и левую кольцевую канавку клапана сообщается со сливным каналом Б, и вследствие перепада давления в полостях цилиндра головка гидроусилителя начнет перемещаться влево относительно штока с поршнем и распределительного золотника. При смещении корпуса головки гидроусилителя относительно золотника произойдет сообщение через кольцевую расточку золотника канала А с каналом через каналы Е и Г. Одновременно канал М через каналы В и Д. и левую кольцевую канавку золотника сообщится со сливным каналом Б.
Вследствие возникающего перепада в полостях силового цилиндра исполнительный шток переместится вправо вызывая перемещение органов управления. Так как головка гидроусилителя имеет возможность перемещаться относительно штока с поршнем на ±6 мм от нейтрального положения, что соответствует 20% от общего хода исполнительного штока, то и органы управления от сигналов автопилота переместятся в 20%-ной зоне от их общего хода. Такой диапазон управления от автопилота выбран с целью безопасности на случай отказа автопилота. При перемещении распределительного клапана влево происходит подача гидрожидкости под давлением в противоположные полости цилиндров, поэтому и направление движения исполнительного штока изменяется на противоположное.
При комбинированном управлении на гидроусилитель передается усилие пилота через ручку управления с одновременной коррекцией за счет соответствующих электрических сигналов от автопилота, обеспечивающих автоматическое устранение самопроизвольных отклонений вертолета, т. е. при ручном управлении вертолетом исполнительный шток гидроусилителя при перемещении командных рычагов перемещается в ту же сторону. Одновременно с этим в случае самопроизвольного отклонения вертолета автопилот посылает сигналы на поляризованное реле, от которых перемещается клапан 8, жидкость подается на перемещение цилиндра, и следовательно, корпуса головки гидроусилителя. Корпус перемещается относительно золотника, от которого жидкость по каналу А поступает в силовой цилиндр, перемещает его шток, и тем самым автоматически устраняется самопроизвольное отклонение вертолета.
Для предотвращения ухода вертолета в противоположную сторону с потенциометра ИПБ-45-1 гидроусилителя на вход агрегата управления автопилота поступает сигнал, противоположный по знаку управляющему сигналу. В дальнейшем потенциометр вырабатывает сигналы, пропорциональные перемещению головки относительно исполнительного штока.
При отключении комбинированного управления механизм возврата устанавливает головку гидроусилителя в нейтральное положение относительно поршня. При этом клапан кольцевания 16 сообщает между собой полости цилиндра комбинированного управления, что облегчает стопорение головки гидроусилителя стопором.
Выключение комбинированного режима работы гидроусилителей во всех системах управления осуществляется путем выключения автопилота. Кроме того, отключение канала высоты автопилота и режима комбинированного управления в гидроусилителе общего шага происходит при нажатии кнопки расстопоривания фрикциона ручки ШАГ-ГАЗ, т. е. когда возникает необходимость вручную изменить высоту полета.
При отсутствии давления в основной и дублирующей гидросистемах гидроусилитель преобразуется в жесткую тягу проводки управления. В гидросистеме имеется клапан кольцевания, обеспечивающий кольцевание полостей силового цилиндра через распределительный золотник ручного управления. Это дает возможность при неработающей гидросистеме вручную через командные рычаги и цепи управления вертолетом воздействовать на перемещение распределительного золотника, а от него через корпус головки на положение исполнительного штока и далее на управляемые органы.
При отклонении ручки управления перемещается золотник, и жидкость из одной полости цилиндра вытесняется, отжимает шарик клапана и далее через центральную кольцевую расточку в золотнике и каналы Д или Е (в зависимости от направления движения золотника) заполняет противоположную полость цилиндра. После остановки распределительного золотника за счет действия внешних сил на исполнительный шток последний займет новое необходимое положение.
Таблица №ХХХ Основные технические данные КАУ-30Б
| Рабочее давление, кгс/см² | от 45±3 до 65+8-2 |
| Максимальное усилии, развиваемое гидроусителем при давлении в гидросистеме 65 кгс/см², и скорости штоув равной 0, кгс/см² | Не более 1700 |
| Ход исполнительного штока, мм Полный Рабочий | 74±2 70(по 35 в обе стороны) |
| Ход головки гидроусилителя от нйтрального положения при комбинированном управлении, мм | ±6 |
| Ход распределительного золотника ручного управления, мм | Не более 12 |
| Средняя скорость движения исполнительного штока при ручном управлении, при загрузки от 0 до ±1500 кгс/см², мм/с | Не более 60 |
| Питание потанциометра ИПБ-45-1 Напряжение, В Частота, Гц | |
| Масса агригата. кг | Не более 12 |
Гидроусилитель РА-60Б
Гидроусилитель РА-60Б является гидроэлектромеханическим исполнительным силовым механизмом, установленным в системе путевого управления вертолетом. По устройству, принципу действия и схеме работы гидроусилитель РА-60Б аналогичен гидроусилителю КАУ-ЗОБ и отличается от последнего тем, что имеет специальный механизм перегонки, концевые микровыключатели, другой профиль лысок распределительного золотника ручного управления и увеличенный диапазон его хода до 2,1 мм(см. Приложение №16). Механизм перегонки (механизм отключения обратной связи исполнительный шток — распределительный золотник ручного управления) позволяет расширить диапазон работы гидроусилителя при комбинированном управлении, т. е. при необходимости обеспечить полный ход исполнительного штока от электрических сигналов автопилота при комбинированном управлении двух микровыключателей. Двуплечая качалка шарнирно установлена на кронштейне, закрепленном к корпусу головки гидроусилителя. Верхнее плечо качалки развернуто в цилиндр, в котором размещены два стакана с установленной между ними пружиной. Нижнее плечо качалки заканчивается проушиной для соединения с тягой, связывающей качалку с нижним плечом качалки гидроусилителя. Скоба механизма винтами закреплена к нижней площадке носка штока комбинированного управления. Она имеет два регулировочных винта, установленные на одной оси со стаканами, двуплечей качалки. Скоба одновременно предотвращает поворот штока относительно головки с помощью направляющих подшипников, смонтированных в кронштейне. К заднему плечу скобы жестко закреплен рычаг с пружинным упором микровыключателей. Микровыключатели смонтированы на двух стойках, закрепленных винтами к нижнему фланцу корпуса головки гидроусилителя. Регулировочные винты ограничивают свободное перемещение верхнего плеча качалки механизма при относительных перемещениях головки. Разность между величиной свободного хода качалки из среднего положения до упора ее в регулировочный винт и величиной относительно хода головки от среднего положения до упора определяет смещение распределительного золотника ручного управления от среднего положения при перегонке.
Стаканы двуплечей качалки обеспечивают перемещение входной качалки гидроусилителя в сторону, противоположную перегонке, силой, приложенной к точке соединения входной качалки с проводкой управления. Механизм перегонки совместно с микровыключателями закрыт кожухом, закрепленным к корпусу головки винтами.
Гидроусилитель РА-60Б может работать в ручном (ножном) режиме, режиме комбинированного управления как от сигналов автопилота, так и от ножного управления, в режиме при отсутствии давления рабочей жидкости в гидросистеме и режиме перегонки.
В первых трех случаях схема работы РА-60Б ничем не отличается от гидроусилителя КАУ-ЗОБ. Работа гидроусилителя РА-60Б в режиме перегонки заключается в следующем. При работе гидроусилителя в комбинированном режиме после отработки максимального сигнала от автопилота, т. е. когда шток цилиндра комбинированного управления становится на упор, пружинный упор нажимает на микровыключатель, который подает импульс тока на электромагнитный тормоз ЭМТ-2М для его растормаживания, и нагрузка с педалей снимается. Одновременно вследствие разности относительного хода головки и свободного хода двуплечей качалки последняя упирается в один из регулировочных винтов на скобе механизма и через тягу поворачивает входную качалку гидроусилителя и перемещает распределительный золотник ручного управления по ходу исполнительного штока на определенную величину относительно среднего положения. Поскольку золотник обеспечивает поступление гидравлической жидкости в полость силового цилиндра, исполнительный шток агрегата продолжает перемещаться в ту же сторону с постоянной и небольшой скоростью. Вместе с исполнительным штоком перемещаются и педали управления.
Перегонка продолжается до тех пор, пока на вход привода не поступит сигнал стабилизации обратного знака. Для изменения направления движения исполнительного штока при перегонке необходимо к педалям управления приложить увеличенное усилие в направлении, противоположном движению исполнительного штока. Это усилие передается на качалку, происходит перекладка золотника, и исполнительный шток перемещается в обратную сторону. При необходимости пилот может переключить управление на себя путем нажатия на гашетки педалей, в результате чего стабилизация вертолета по курсу отключается. В этом случае на гидроусилитель передается воздействие от пилота с одновременной коррекцией от автопилота движения вертолета по угловой скорости рыскания. При этом комбинированное управление работает в небольших пределах, и перегонки не происходит. При снятии ног с педалей автоматически включается стабилизация вертолета по углу курса, и вертолет удерживается на новом курсе.
Трубопроводы гидросистемы.
Трубопроводы гидросистемы в магистралях, нагруженных давлением, выполнены из бесшовных труб, изготовленных из нержавеющей стали Х19Н9Т, а на участках, не нагруженных давлением, — из алюминиевого сплава АМг2М. В местах подвода жидкости к управляемым гидроагрегатам применены гибкие резинотканевые шланги, заделанные в оплетку. Для удобства выполнения разводки и повышения эксплуатационной технологичности трубопроводов на гидропанели установлены коллекторы. Каждый коллектор состоит из толстостенной трубки с приваренными по концам штуцерами для подсоединения трубопроводов гидросистемы. В трубку вварены штуцера для крепления гибких шлангов накидными гайками.
Трубопроводы крепятся к гидропанели и другим элементам конструкции при помощи дюралюминиевых колодок с резиновыми прокладками. Трубопроводы имеют ниппельное соединение, снаружи окрашены эмалью серого или зеленого цвета с нанесением маркировочных колец согласно назначению.
cyberpedia.su
Ручки управления системой шаг—газ | Авиация
Две ручки системы шаг—таз, установленные па общем горизонтальном вале, работающем на кручение (фиг. 218), размещены в кабине летчиков с левой стороны каждого сиденья.
Горизонтальный вал своими цапфами установлен па шарикоподшипниках в литых кронштейнах 14 и 19, прикрепленных болтами к полу кабины. При переводе летчиком ручки шаг—газ вал поворачивается на цапфах вокруг своей оси и рычагом 15, приваренным к нему, приводит в движение цепь управления общим шагом несущего винта. Одновременно поводок 10, установленный на шлицах внутреннего валика 17, приводит в движение цепь управления нормальным газом двигателя.
На кронштейне 19 у левой ручки имеется зубчатый сектор 29 для
фиксации ручек шаг… — газ в их промежуточных положениях. Шаг зуба
сектора обеспечивает установку общего шага несущего винта — ч-с-рез, каждые 21,55
Конструктивно левая ручка шаг—газ выполнена следующим образом. Основание ручки 31, изготовленное из сплава А Кб, с одной ст-оропы имеет фланец для крепления ее болтами к башмаку 9 горизонтального вала, а с другой — направляющее отверстие, в которое запрессован и укреплен в нем винтами стальной полый стержень 23.
На верхнем конце стержня установлена па двух шарикоподшипниках поворотная рукоятка 2, на которую запрессована и закреплена к ней четырьмя винтами бронзовая гайка 3 с во-сьмизаходной резьбой прямоугольного профиля. Рукоятка изготовлена из стали 45 и обтянута снаружи специальной резиновой муфтой 43. Нижний шарикоподшипник запрессован — в рукоятку и прижат к ней при помощи шайбы 45 гайкой 3. Верхний шарикоподшипник плавающий.
Для затяжки рукоятки на стержне гайкой 41 внутри — ее между шарикоподшипниками установлена — распорная втулка 44. Контровка — гайки осуществлена при помощи специальной шайбы 42, путем — отгиба ее в шлицевые прорези гайки.
Бронзовая гайка пов-оротнсй — рукоятки навинчена на стальной винт 4, который при проворачивании рукоятки перемещается вдоль стержня ручки.
Для уменьшения трения скольжения винт установлен па стержень на двух бронзовых втулках с легкоходовой посадкой. Поступательное
перемещение винта обеспечивается двумя шпонками 5, прикрепленными винтами к стержню ручки; направляющие пазы под шп-онки в хвостовике винта имеют длину, равную 36 мм. При повороте рукоятки — па угол 95° шпонки, размещенные в направляющих пазах, ограничивают перемещение винта до 17 мм. На хвостовик винта — навинчен и законтрен контргайкой дуралю-мипо-вый ползун 7, который вместе с винтом перемещается — вдоль стержня. В нижней части ползуна установлена на — резьбе специальная консольная шпилька для подсоединения звена 12.
На основании 31 ручки установлена на шарикоподшипниках двуплечая качалка 8, — одно плечо которой соединено — регулируемым звеном 12 270
с ползуном, а другое — звеном 13 с поводком 10. В нижней части кронштейна 19 на шарикоподшипниках установлена двуплечая качалка 36, связанная тягой 35 с поводком 10. Второе плечо качалки 36 служит для подсоединения цели управления нормальным газом. Шарнирные соединения звеньев с ползуном, с качалкой и поводком осуществлены на шарнирных подшипниках ПК).
При повороте рукоятки ползун, перемещаясь вдоль стержня, через звенья и качалку поворачивает поводок 10 вместе с внутренним валиком 17. На правой ручке поворотная рукоятка связана (аналогично левой) со вторым поводком 10 внутреннего валика, чем обеспечивается синхронность поворота рукояток правой и левой ручек шаг—газ и возможность управления е любой ручки.
Для регулирования степени свободы вращения поворотной рукоятки на левой ручке имеется фрикционный тормоз. Момент торможения образуется вследствие трепня конусных поверхностей бронзовой гайки поворотной рукоятки и стального кольца 24, нажимаемого — пружиной 25. Натяжение пружины, а следовательно-, и величина тормозного мод-тента, регулируется муфтой 26, установленной на резьбе кольца 27. Кольцо — 27 неподвижно закреплено винтами на стержне ручки совместно с направляющими ш п о н к а м и.
Для стопорения ручек на зубчатом секторе, внутри полого стержня ручки, установлен с ходовой посадкой стакан 37. В окно стакана заделана защелка 38, жестко связанная с ним штифтом. Защелка изготовлена из стали 18ХНВА с цементированной поверхностью.
Надежное сцепление защелки с зубьями сектора, а следовательно, и стопорение всей ручки, обеспечивается пружиной 28, которая, упираясь в буртик втулки 40, отжимает стакан 37 вверх.
Выключение стопора осуществляется нажатием гашетки 1, шарнирно установленной в ушках колпачка 21. Колпачок навернут на верхнюю часть поворотной рукоятки и законтрен двумя резьбовыми штифтами.
При нажатии гашетки поршень 20 перемещается вниз и посредством тяги 22, шарнирно связанной с ним и стаканом 37, отжимает пружину а выводит защелку из зацепления с сектором.
Для выключения стопора с правой ручки поршень последней связан тягами 6, 18 и 34 н двумя качалками 30 со стаканом левой ручки.
Для устранения возможности проворачивания поршня 20 при поворотах рукоятки на нем установлена направляющая шпонка, скользящая в пазах стержня ручки.
Сферическая поверхность поршня и нажимная часть гашетки цементированы и — отшлифованы. Тяги 6, 22 и 34 выполнены из стальных трубок е приваренными наконечниками. Тяга 18 изготовлена из дуралюми — новой трубки е приклепанными стальными наконечниками. Вое шарнирные соединения указанных тяг — осуществлены на — бронзовых втулках. Тяги 6, 22 и 18 имеют регулировку по длине за счет резьбовых наконечников.
Правая ручка шаг—газ по — конструкции аналогична левой и отличается от нее только отсутствием фрикционного тормоза поворотной рукоятки, стакана с защелкой и пружины стопорного устройства.
Горизонтальный вал выполнен из хромансилевой трубы 16 с приваренными фланцевыми втулками 46 и рычагом 15. К втулкам на плотной посадке присоединены башмаки 9 из сплава А Кб и укреплены каждый тремя болтами к фланцам втулок.
Цапфы 33 из хромансилевой стали плотно посажены в башмаки и зажаты накидными гайками 32, законтренными стопорными кольцами.
Четыре шпильки, ввернутые в каждый башмак, служат для крепления ручек. Внутри башмаков, соосно е осью цапф, установлено по одно-
му шарикоподшипнику, на которых поворачивается внутренний валик 17, кинематически связывающий поворотные рукоятки правой и левой ручек.
В левом башмаке шарикоподшипник зажат резьбовой втулкой, а в правом — подшипник плавающий, т. е. имеет возможность перемещаться относительно башмака в осевом направлении.
Внутренний валик 17 выполнен из дуралюмиповой трубы с вклепанными стальными наконечниками 11. Наконечники имеют эвольвентные шлицы, на которых осуществлена установка стальных поводков 10, и хвостовики с резьбой. На хвостовики навернуты шлицевые гайки, удерживающие поводки от осевых перемещений. Контровка гаек осуществлена отгибными шайбами. Внутри валика проходит регулируемая тяга 18 стопорного устройства, которая подсоединена к качалкам 30, установленным на бронзовых втулках в башмаках.
Кронштейны 14 и 19 изготовлены из магниевого литья МЛ5. В каждом кронштейне запрессовано по одному шарикоподшипнику закрытого типа, в которые при помощи своих цапф вмонтирован горизонтальный вал. В кронштейне 19 подшипник завальцован, в кронштейне 14 — плавающий. Внутренние обоймы подшипников затянуты специальными болтами 39, ввернутыми в цапфы.
Зубчатый сектор 29, укрепленный на кронштейне четырьмя болтами, выполнен из стали 18ХНВА с цементированными зубьями. На1 секторе установлен ограничитель нижнего положения ручки шаг—газ, соответствующего 3°30′ общего шага несущего винта. Ограничитель выполнен в виде фрезерованной стальной скобы и укреплен на секторе при помощи болта.
ooobskspetsavia.ru
Управление общим шагом несущего винта и двигателями вертолета
Управление общим шагом НВ и двигателями на вертолете осуществляется рычагом общего шага 1, который кинематически связан с ползуном АП при помощи рычага 10 и одновременно с рычагами 8 топливного агрегата, расположенными на двигателях.
Рычаг общего шага с системой фиксации в любом положении располагается слева от сидения летчика. Для фиксации рычага служат фрикционные устройства с ручным или гидравлическим управлением.
Изменение общего шага связано с управлением мощностью двигателей вертолета либо посредством механической кинематической связи, либо автоматически через стабилизатор частоты вращения. В обоих случаях обеспечивается поддержание заданной частоты вращения НВ при изменении общего шага, т.к. одновременно соответственно изменяется мощность двигателя. В случае механической связи шага с газом ручка шага имеет специальную поворотную рукоятку коррекции, соединенную с дросселем (рычагом подачи топлива) двигателя. При помощи этой рукоятки летчик может корректировать частоту вращения НВ в допустимых пределах независимо от его шага.
Автоматическое регулирование частоты вращения НВ при изменении его общего шага, угла атаки и скорости полета вертолета осуществляется обычно путем изменения подачи топлива в двигатели. Автономная система регулирования силовой установки может быть расположена непосредственно в двигателе. Она обеспечивает как изменение его мощности вручную в диапазоне от малого газа
до взлетного режима, так и автоматическое поддержание заданной частоты вращения НВ постоянной. Данная система регулирования двигателей может работать и без ручного управления «шаг-газ», т.е. рычаг общего шага может изменять только величину шага без изменения положения рычага подачи топлива, который должен быть переведен в положение «автомат». Перестраивая регулятор частоты вращения, можно менять ее диапазон ограничения, что необходимо для получения оптимальных режимов работы силовой установки в зависимости от высоты и скорости полета.
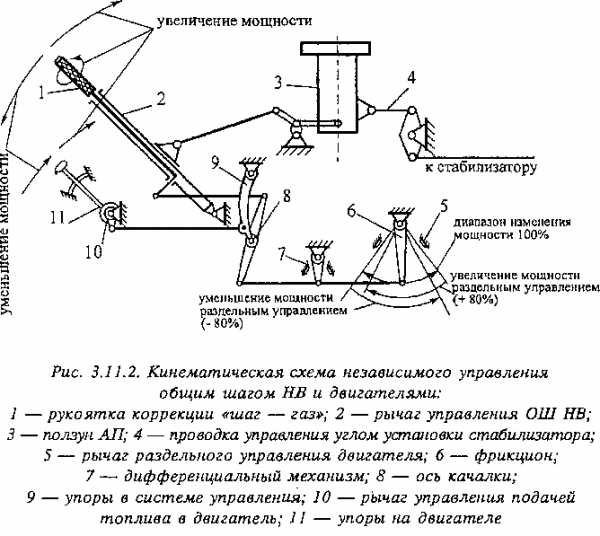
Возможна и другая система автоматического регулирования частоты вращения НВ, в которой используется стабилизатор — автоматический регулятор подачи топлива, включенный в систему ручного правления «шаг-газ» через раздвижную тягу. Летчик в любой момент может вмешаться в управление. Стабилизатор может быть выключен в случае какой-либо его неисправности. Раздвижная тяга, работающая от стабилизатора частоты вращения, автоматически становится в нейтральное положение, обеспечивая этим возможность нормального ручного управления.
Диапазон работы стабилизатора частоты вращения через раздвижную тягу может составлять до 40—50% полного хода рычага подачи топлива на двигателях. Включение стабилизатора частоты вращения в неполном диапазоне управления увеличивает безопасность при его отказе. В то же время наличие ручного управления дает возможность летчику при резких изменениях режима полета вмешаться в управление и увеличивать диапазон, необходимый стабилизатору. При отказе одного из двигателей автомат выводит работающий двигатель на увеличенную мощность вплоть до взлетной и выше — в зависимости от режима полета. При наличии стабилизатора частоты вращения рукояткой коррекции летчик не пользуется, но ее целесообразно сохранить для работы при отказе автоматики.
На вертолетах , имеющих два и более двигателей, кроме системы «шаг-газ», устанавливается система раздельного управления мощностью двигателей. Уменьшение мощности двигателей достигается перемещением рычагов вниз (от себя), увеличение — перемещением рычагов вверх (на себя). Этими рычагами пользуются, в основном, на земле при раздельном опробовании двигателей и в аварийных случаях в полете, при необходимости повторного запуска отказавшего двигателя.
Для раздельного выключения двигателей в кабине летчиков имеются рукоятки управления кранами останова, располагаемые в удобном для управления месте.
Для аварийного выключения двигателей (в случае пожара) летчик дополнительно может прекратить подачу топлива в двигатели при помощи пожарных кранов.
Для улучшения балансировочных характеристик одновинтовых вертолетов управление общим шагом НВ, обычно связывают со стабилизатором 4 . Особо важное значение эта связь имеет для перехода на режимы моторного планирования и авторотации. Узел управления стабилизатором подсоединяется к ползуну АП.
Характер зависимости изменения угла установки стабилизатора от общего шага НВ.
Чтобы при изменении общего шага НВ свести к минимуму отклонение кольца АП, тяги 3, идущие к качалкам продольного или поперечного управления, должны быть достаточно длинными и расположенными по возможности перпендикулярно направлению перемещения ползуна. Значение этой нежелательной взаимосвязи невелико. На легких вертолетах может быть применена специальная кинематика , полностью устраняющая взаимосвязь продольного и поперечного управления от общего шага. Однако применение такой схемы на тяжелых вертолетах ведет к существенному увеличению массы элементов механической проводки управления.
Кинематическая схема управления НВ может быть выполнена таким образом, что по трем каналам работают одновременно три ГУ . Подобная кинематическая схема работы ГУ управления НВ позволяет обеспечить независимость каналов управления НВ, создать оптимальную КСС АП и уменьшить потребные усилия на штоках силовых ГУ.
avia.pro
Системы «шаг—газ» вертолетов с поршневыми двигателями | Авиация
При перемещении рычага общего шага изменение общего шага несущего винта происходит обычно по линейному закону. В то же время закон изменения мощности двигателя, управление которым кинематиче
ски связано с рычагом общего шага, делается нелинейным, путем введения в кинематику специального кулачка.
Исходя из характеристик поршневого двигателя конструктивно оказалось возможным применить довольно простую кинематическую связь между изменением общего шага несущего винта и мощностью двигателя. В этом случае при перемещении рычага общего шага, связанного, с управлением двигателя, мощность последнего изменяется таким образом, что при разных значениях общего шага обороты несущего винта остаются приблизительно постоянными. Имеющаяся на рычаге общего
 -Моторное птаниродание
-Моторное птаниродание
‘Участой характеристики подбирается исходя из необходимости предот6растить раскрутки’ несущего динта при. Выходе на рабочие режимы
шага поворотная рукоятка коррекции дает летчику возможность через ту же кинематическую связь корректировать мощность двигателя без изменения шага несущего винта. Диапазон коррекции в данном случае относительно невелик и довольно редко используется летчиком в полете.
При проектировании такого управления необходимо исходить из характеристик двигателя, т. е. знать закон изменения его мощности в зависимости от подачи топлива в диапазоне заданных высот полета вертолета. Кроме того, надо иметь характеристики основных режимов полета вертолета, т. е. соотношение общего шага несущего винта и мощности (на висении, горизонтальном полете, планировании и авторотации). Исходя из этого можно построить график (рис. 3. 14), из которого видно, как надо осуществить кинематическую связь управления общим шагом и мощностью двигателя для обеспечения нормального управления вертолетом.
Величина коррекции должна охватывать такой диапазон изменения мощности двигателя, при котором обеспечивались бы все указанные режимы полета вертолета.
При построении такого графика надо учитывать имеющуюся автоматику на двигателе, влияющую на подачу топлива при изменении высоты полета (РПД), т. е. иметь все необходимые высотные характеристики его работы.
| |
|
Приведем методику определения кинематики системы «шаг—газ» для вертолета Ми-4 с поршневым двигателем. Для проектирования необходимо иметь следующие данные:
1) график зависимости между шагом несущего винта и потребной мощностью для разных режимов полета, показанный на рис. 3. 15 (кривые А)
2) зависимость между мощностью двигателя и углом поворота рычага дросселя, показанные на рис. 3.15 (кривые Б).
Имея эти зависимости, можно построить зависимость между шагом несущего винта (р и углом поворота рычага дросселя а для разных режимов полета.
Построение производится по точкам. Взяв произвольную точку X на кривой А (см. рис. 3. 15), определяем шаг и мощность ей соответствующие, затем по кривой Б определяем для точки X угол поворота рычага дросселя соответствующий ранее найденной мощности. Зная фх и а*, наносим точку X (см. рис. 3. 14).
Построив график зависимости <р от а, можно нанести на нем линии, ограничивающие необходимое изменение мощности двигателя при управлении на всех режимах полета.
Кривая средней коррекции показывает изменение угла поворота рычага дросселя а при отклонении ручки общего шага. В этом случае летчик не поворачивает рукоятки коррекции газа — она находится в среднем положении. При повороте ее летчиком в крайнее левое положение либо в крайнее правое изменение а происходит по кривым левой и правой коррекции.
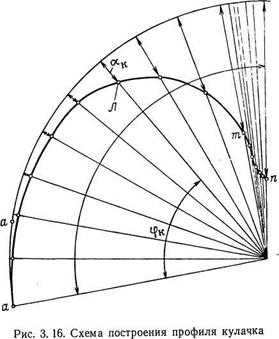
Имея график 3. 14, легко построить профиль кулачка, обеспечивающего указанную кинематику управления двигателем, при изменении общего шага ф. Профиль кулачка для вертолета Ми-4 показан на рис. 3. 16. Здесь угол поворота кулачка фк соответствует изменению общего шага несущего винта, а изменение радиуса кулачка ак при угле поворота фк — повороту дроссельной заслонки (см. рис. 3. 16), где а—а—-угол поворота кулачка, соответствующий углу поворота ручки коррекции; А° — полный угол поворота кулачка (см. рис. 3. 14).
Одновинтовые отечественные вертолеты с поршневыми двигателями не имеют автоматов оборотов, так как существующее кулачковое управление обеспечивает поддержание оборотов несущего винта в заданных пределах при незначительном вмешательстве летчика в управление через коррекцию газа.
ooobskspetsavia.ru
Аппаратура радиоуправления — шаги по настройке
Автор — Владимир Голубев (VladimirG)Введение
После разработки механизма коллективного управления углом атаки лопастей (общий шаг) модели вертолета, началась новая эра пилотирования. Радиоуправляемые вертолеты получили возможность выполнять исключительно сложные маневры, такие, как висение и полет ротором вниз. При этом возникли трудности уже не у аппарата, а у пилота. У нас всего две руки, а каналов для управления — минимум пять. Конечно, проблема двух рук и пяти каналов уже решалась управлением с помощью одной ручки газа двумя зависимыми параметрами — газом и шагом (углом атаки лопастей), задаваемых в аппаратуре с помощью кривых, но это не позволяло осуществлять пилотирование во всех возможных вариантах. Тогда-то и придумали полетные режимы.
Что такое полетные режимы и зачем они нужны
При пилотировании радиоуправляемого вертолета возникает потребность в специальных настройках модели для выполнения каких-либо фигур или просто удобного совершения полетов. Так, для комфортного висения, взлета и посадки нужен небольшой расход шагов в отрицательную сторону и большой — в положительную. Для 3D-пилотажа желательны максимальные расходы шага в обоих направлениях. Для выполнения какой-то особой фигуры может потребоваться вообще какая-то уникальная настройка модели, и так далее.
Как путь решения данной проблемы практически во всех микропроцессорных передатчиках уже создаются так называемые «полетные режимы». Их может быть от одного до максимально возможных к заданию в аппаратуре. При этом, в зависимости от производителя оборудования и его марки, возможны различные варианты реализации настроек индивидуальных параметров полетных режимов. В любом случае, все передатчики с вертолетной программой обязательно позволяют хранить 3 кривые для каждого полетного режима:
- Шага
- Газа
- Шага хвостового ротора. Не используется, когда гироскоп работает в режиме «удержания направления» (Heading Hold, AVCS).
Давайте с вами рассмотрим наиболее употребительные варианты настройки полетных режимов. При этом, конечно, не забываем об основном принципе: ротор модели вертолета должен вращаться с постоянной скоростью.
Использование полетных режимов
Для того, чтобы понять, как их использовать, давайте рассмотрим две модели.
Пилотажный вертолет, выполняющий серию фигур, а именно:
- Взлет.
- Пролет по прямой, переключение на Idle1.
- Разворот с разгоном.
- Петля.
- Бочка, переключение на Idle2.
- Часы, переключение на Normal.
- Разворот, переключение на Hold (авторотация).
- Посадка на авторотации.

Рабочий вертолет
- Взлет, переключение на дополнительный полетный режим (Idle1).
- Выполнение каких-либо действий, переключение на Normal.
- Посадка.
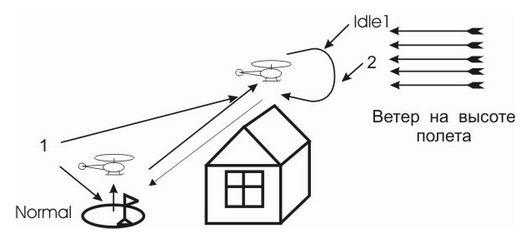
При этом можете обратить внимание на то, что вместо настроек Idle 1 дополнительно заданы настройки полетного режима, возможно, более стабильного висения или чего-то еще.
Полетные режимы
Рассмотрим наиболее часто употребляемые полетные режимы и варианты их настройки.
Что такое кривая шага, газа
Считается, что перемещение заслонки двигателя в зависимости от положения ручки газа на аппаратуре всегда линейно. К моделям вертолетов данный принцип не относится — здесь управление происходит только шагом винта основного ротора, и положение заслонки является производной шага, а вид кривой зависит от нагрузки на ротор. Управление не имеет линейной зависимости, и в связи с этим управляющие воздействия задаются кривыми газа и шага.
При изменении шага основного ротора меняется и реактивный момент, разворачивающий вертолет в направлении, противоположном вращению ротора. Соответственно, для компенсации этого явления приходится вносить поправку в тягу хвостового ротора. Обычно это делается путем задания зависимости шага хвостового ротора от газа мотора. При использования гироскопов в режиме «удержания направления» (Heading Hold, AVCS) данную кривую не задают.
Нормальный режим (Normal)
Данный полетный режим является наиболее употребительным, во всяком случае, все начинающие пилоты обучаются пилотированию модели в этом режиме. Более опытные пилоты осуществляют в этом режиме только взлет и посадку. Нормальный режим считается базовым при настройке аппаратуры, а в некоторых моделях передатчиков он даже выносится в отдельную строку при настройке — в отличие от пилотажных режимов. Таким образом, у вас может не быть пилотажной настройки, а вот «Нормальная» должна быть всегда.
Для чего тогда предназначен этот режим и что в нем можно делать?
- Взлет
- Посадка
- Висение
- Полет в горизонте без переворотов
- Любые маневры, где не требуется обратный шаг (отрицательный угол наклона лопастей главного ротора) и повышенная энерговооруженность.
Кривая шага:
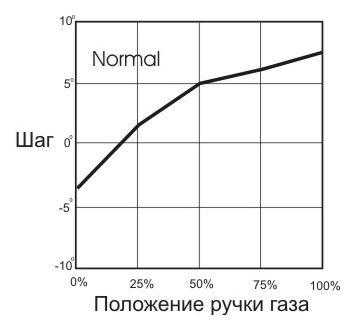
В первой точке угол равен -4 градуса. Данный параметр влияет на скорость спуска модели вертолета. Его иногда устанавливают равным -5…-6, но, как правило, только опытные пилоты, так как при порывах ветра при малом шаге модель «вспухает» — почти прекращает свой спуск. Причиной служит ветер, увеличивающий подъемную силу. Но в случае пропадания порыва модель, конечно, начнет более быстрый спуск. Новичкам можно рекомендовать установить -3 градуса — тогда модель будет очень медленно спускаться, даже если вы дадите ручку до конца вниз. Однако в порывистый ветер пилотирование будет более сложным.
Давайте рассмотрим соответствующую кривую газа:

Кривая газа, конечно, начинается с 0. В ее нижней точке вы производите запуск двигателя вашей модели вертолета. Далее — крутой подъем до 35% (в зависимости от мощности используемого двигателя), и небольшая пологая часть. На этой части кривой и происходит пилотирование. Обычно скорость вращения ротора в этот момент около 1500 оборотов при шаге 5-6 градусов; при этом ручка газа на аппаратуре находится ровно посредине. Кстати, насчет этого есть различные мнения. Большая часть пилотов советует настраивать точку висения на 3/4 ручки газа, мотивируя это тем, что пилот привыкает к точке висения в том положении, где она будет при 3D полетах, а также тем, что при переключении режимов в «точке висения» не будет рывков модели. Половина хода ручки рекомендуется только при начальном обучении, и то не всегда — переучиваться потом труднее, чем учиться.
В данный момент модель вертолета висит без перемещения по вертикали. Эту точку часто называют точкой висения, когда происходит уравновешивание подъемной силы и силы тяжести. Это особая точка. Многие типы аппаратуры позволяют точно подстраивать (триммировать) шаг и газ в этой точке.
Далее. Для поддержания постоянных оборотов при увеличении шага, конечно, поднимается и кривая газа:
Пилотажный режим 1 (Idle1)
При дальнейшем совершенствовании техники пилотажа пилоты столкнулись с проблемой полета в инверсном режиме (инверсе), то есть вниз ротором.
При этом, разумеется, ротор сохраняет направление вращения, а меняется только угол атаки лопастей — на отрицательный.
Существует две методики такого пилотирования: с инвертированием управления (с помощью переключателя) и без инвертирования. В первом случае переключатель на аппаратуре позволяет полностью изменить управление, то есть попросту «перевернуть» его — вы сможете продолжать полет без проблем, как и летели до этого в нормальном полете. Второй случай — без инвертирования переключателем. В инверсном полете при опускании ручки газа вниз вы получаете обратный (отрицательный) шаг и увеличение мощности двигателя.
Если бы не надо было выполнять каких-либо пилотажных фигур с постоянным изменением ориентации модели, то с использованием переключателя, конечно, было бы удобнее летать. Но пилот мечтает выполнять сложные и красивые полеты! А тогда можно просто запутаться с переключателем… В настоящий момент развивается, главным образом, одно направление — управление без использования переключателя. При этом необходимо, чтобы при увеличении отрицательного шага соответственно добавлялся и газ — дабы сохранить равномерное вращение ротора. Обычно для этого режима устанавливают около 1600 оборотов в минуту, что позволяет выполнять более резкие маневры.
Для чего предназначен этот режим и что в нем можно делать?
- Горизонтальный быстрый полет, с разгоном.
- Петли
- Любые маневры, где требуется обратный шаг без повышенной энерговооруженности.
Кривая шага:
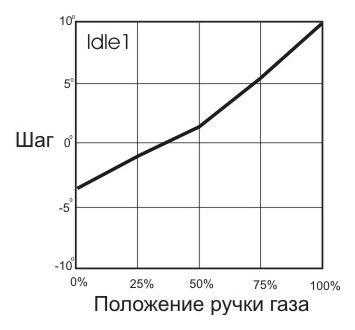
Кривая шага начинается со значений шага, равных -5…-6 градусов при положении ручки около нуля. Этого угла достаточно для выполнения пилотажных фигур: петля, бочка, висение. Центральная точка позволяет осуществлять висение при более высоких оборотах. Ну, а крайняя правая соответствуем максимумам шага и мощности двигателя.
Кривая газа:

Кривая имеет вид воронки с небольшим скосом. Обычно Idle1 используют для выполнения таких фигур, как петля, бочка, висение в инверсе — то есть для выполнения маневров с небольшой нагрузкой на ротор в перевернутом полете. Поэтому и первая точка расположена чуть ниже, чем 100%. Центральная точка устанавливается так, чтобы ротор не раскручивался больше, чем требуется для полетного режима при положении ручки газа в середине. Эта точка на кривой газа немного выше, чем при полете в «Нормальном» режиме — для обеспечения ротора большим запасом энергии. При использовании более мощных двигателей возможна и обратная ситуация: в центральной точке кривая будет намного ниже, чем в нормальном режиме. Крайняя правая точка находится на 100 процентах, так как мы используем максимальный шаг:
Пилотажный режим 2 (Idle2)
Развитие пилотажа, накопление опыта пилотирования, изобретение новых фигур, появление новых возможностей моделей привело к рождению 3D- пилотажа. 3D-пилотаж требует особых настроек модели вертолета. На вопрос, каких именно, можно ответить просто — максимально возможных! Пилот-экстремал пытается выжать из модели вертолета максимум возможностей. При этом полет производится с максимально возможными значениями шага и мощности, при поддержании постоянных оборотов главного ротора.
Для чего предназначен это режим и что можно делать?
- Все возможности Idle1
- Часы (Тик-Так, Метроном)
- Торнадо
- Отстрел
- Петли с пируэтами
- Висение ротором вниз (Инверс)
- Любые маневры, где требуется обратный шаг с повышенной энерговооруженностью.
Кривая шага:

Кривая шага имеет самую простейшую форму: это прямая линия от минимального значения шага до максимального, проходящая, конечно, через 0. При недостаточной мощности двигателя некоторые пилоты рекомендуют сделать ее в виде ломаной линии с центральной точкой в +2 градусах. Модель получает максимально возможные динамические характеристики.
Кривая газа:
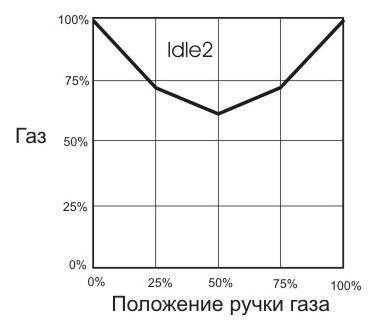
Для обеспечения постоянных оборотов кривая газа также изменяется и, соответственно, уже две точки находятся на 100 %. При этом не надо забывать, что в среднем положении ротор не должен излишне раскручиваться (более, чем необходимо для пилотирования модели в данный момент). При этом чаще всего используется частота вращения ротора 1750…1850 об/мин.
Авторотация (Hold)
Авторотация является спасательным жилетом вертолета, а для опытного пилота — еще и очень зрелищной фигурой пилотажа. Но поскольку отключать двигатель перед каждой авторотацией не слишком-то интересно, был придуман еще один режим — Hold. Смысл его очень прост — в данном режиме двигатель работает на холостых оборотах и обгонная муфта главного ротора (или связки роторов) и двигателя разблокирована. При этом изменение шага происходит в зависимости от положения ручки газа, а вот двигатель работает на холостых оборотах, пока вы не отключите этот режим.
При обучении возможна и обратная процедура: при неудачном заходе на посадку в режиме авторотации вы можете переключиться в другой полетный режим и продолжить полет.
Для чего предназначен этот режим и что в нем можно делать?
Кривая шага:

Обратите внимание: кривая имеет большой отрицательный шаг в нулевом положении ручки. Это связано с тем, что для поддержания необходимых оборотов главного ротора набегающим потоком необходимо значение шага -6 градусов, а в некоторых вариантах и более. Центральная точка кривой шага находится чуть выше 0 — для комфортного торможения и посадки. Для выполнения 3D фигур в режиме авторотации рекомендуется устанавливать углы в центральной точке 0 градусов. И, конечно, максимум по положительному шагу — чтобы полностью использовать энергию ротора.
Дополнительные режимы
Основная цель полетных режимов — облегчить пилотирование модели. Многие пилоты-спортсмены часто делают полетные режимы практически для каждой выполняемой ими фигуры. При этом учитывается огромное количество параметров. Могут существовать отдельные полетные режимы для всевозможных погодных условий, всяческих дополнительных условий — различных лопастей и т.п. Количество полетных режимов даже на топовых версиях передатчиков невелико, например, у JR10 всего 4, а у Futaba 9Z — 8 полетных режимов. При применении памяти на несколько моделей для использования множественных полетных режимов надо иметь в виду, что переключение между моделями в полете очень опасно! В любом случае, данный механизм позволяет очень точно настроить модель вертолета и аппаратуру к конкретным условиям и требованиям пилота.
Как настраивается модель вертолета
Установка углов атаки лопастей на модели вертолета — очень ответственная процедура. Для настройки понадобятся:
- Конечно же, сама модель вертолета, с корректно настроенной механикой.
- Измерительная линейка или, в случае отсутствия специального измерителя, -транспортир.
- Аппаратура радиоуправления.
- Очень желателен кабель для непосредственного подключения приемника к аппаратуре (DSC-кабель), чтобы не засорять эфир ненужным сигналом.
Теперь приступаем к настройке углов атаки лопастей.
Установим модель вертолета так, чтобы ротор мог свободно вращаться, а лопасти при этом находились на уровне глаз.
Фиксируем сервоось (ось серволопаток) так, чтобы она была параллельна хвостовой балке и перпендикулярна оси ротора. Если зафиксировать ее невозможно, то перед каждой регулировкой будем выравнивать сервоось заново.
- Цапфа крепления лопасти
- Сервоось
- Стопор сервооси, специально разработанный для моделей фирмы X-cell
Устанавливаем измерительную линейку на лопасть. В случае деревянных лопастей — на расстоянии 80 мм от комля, а в случае пластиковых или карбоновых — 80 мм от конца лопасти. Данное правило связано с тем, что деревянные лопасти подвержены крутке, которая обычно меняется в полете. Поэтому точно определить угол по кончику лопасти невозможно. Карбоновые же лопасти могут иметь конструктивную крутку, которую надо учитывать при настройке.
Убеждаемся в том, что механика собрана правильно, следующим образом. При установке в аппаратуре кривой шага в 0 градусов и ручке газа в среднем положении линейка должна показать угол, равный 0, для этого очень удобно использовать полетный режим Idle1. Поворачиваем ротор, переставляем измеритель углов и проверяем угол атаки противоположной лопасти. Если он не равен нулю — настраиваем механику. Для того, чтобы измерить угол, необходимо выровнять базисную поверхность линейки с сервоосью, после чего на линейке и будет указано значение угла атаки лопасти.
Устанавливаем газ в минимальное положение и меняем кривую шага в данной точке пока линейка не покажет нужный угол. Затем передергиваем ручку газа (верх, вниз), чтобы выбрать люфты и измеряем снова. Так повторяем, пока не установим необходимый угол. Данную процедуру установки углов лопастей проводим для каждой заданной точки кривой шага, в случае прямолинейной возможна проверка в крайних и центральной точке.
После установки углов кривой шага можем начать установку кривой газа. К сожалению, никак нельзя проверить ее правильность, кроме как в реальном полете. Желательно проверить, что игла карбюратора совершает правильное, согласно заданной кривой, движение — особенно это важно при 3D настройках.
Далее, если необходимо, производим настройку других полетных режимов. При этом тщательно проверяем установленные углы — обязательно на обеих лопастях.
Итого
Подведем итоги:
- Полетные режимы предназначены для облегчения пилотирования модели вертолета.
- Полетных режимов может быть столько, сколько нужно пилоту: от одного обязательного до максимального количества, поддерживаемых аппаратурой управления.
- Если кривая газа при минимальном положении ручки газа находится не на 0, то двигатель в таком положении заводить нельзя. И останавливать ротор рукой тоже нельзя, поскольку двигатель будет раскручивать ротор. При попытке завести мотор в таком режиме вы можете очень сильно пострадать, а модель — разрушиться.
- Нет четко предписанных полетных режимов — их характеристики зависят только от настроенных кривых газа и шага, а также от желания пилота, безопасности и удобства управления.
- Настройка полетных режимов — очень ответственная операция, требующая повышенного внимания.
- Используйте только специальные линейки для измерения углов, так как они значительно облегчают жизнь.
Внимание!
- Кривые для газа и шага приведены исключительно в качестве примера и не могут быть напрямую использованы в вашей аппаратуре. Используйте только те кривые, что указаны в инструкции на конкретную модель вертолета. Если все же решите использовать приведенные здесь кривые — будьте втройне внимательны при выполнение первых полетов.
- Кривые шага и газа для вашей модели могут значительно отличаться или быть настроены абсолютно по-другому! Методологий по выбору кривых существует множество, консультируйтесь с тем специалистом, которому доверяете в вопросе более точной настройки.
- Перед процедурой запуска двигателя ВСЕГДА ПРОВЕРЙТЕ УСТАНОВКУ ПРАВИЛЬНОГО ПОЛЕТНОГО РЕЖИМА И ПОЛОЖЕНИЯ РУЧКА ГАЗА, ИНАЧЕ ВОЗМОЖНО ПОЛУЧЕНИЕ ТРАВМ И РАЗРУШЕНИЕ МОДЕЛИ.
Обсудить на форуме
www.rcdesign.ru