
Роботизированная техника для склада от производителя Linde
Роботизированная техника
Linde MH представляет модельный ряд роботизированной складской техники Linde Robotics:тележки, штабелеры, ричтраки, тягачи, узкопроходные штабелеры. Оснащенные интеллектуальными системами сканирования пространства, такие модели автоматизированной техники способны выполнять многие задачи без участия оператора. Грузоподъемность роботизорованной техники до 5000 кг. Роботизированная техника запрограммирована на выполнение однотипных интралогистических операций.
Являясь производителем широкого спектра погрузчиков и складской техники, располагая технологией навигации, которой не требуется установка стационарного оборудования, компания Linde предлагает гибкие роботизированные решения. Они могут быть адаптированы под специальные требования (даже для некрупных компаний) с целью автоматизации любых процессов – от отдельных этапов производства до сложных цепочек товаропотоков – с минимальными затратами.
Преимущества погрузочной техники с роботом
Передовые технологии робототехники позволяют получить существенные конкурентные преимущества и в то же время гарантируют высокую степень гибкости технологических процессов. Например, благодаря интеллектуальной системе, которая работает в режиме реального времени, роботизированная складская техника обеспечивает безопасность при движении. Встроенная система геонавигации не требует установки дополнительных программ и успешно справляется с поиском нужного места на складе. Складская роботизированная техника (тележки, штабелеры, ричтраки, тягачи, узкопроходные штабелеры) движется по рассчитанной траектории с рассчитанной скоростью перемещения. У каждой модели есть два режима работы: с оператором и без оператора. Интуитивно понятный интерфейс позволяет оценить параметры установки и получить информацию об устройстве, а также отчет о проделанной работе в реальном времени. Узнайте цены на роботизированные решения для склада, связавшись с представителем Linde в своем городе.
www.linde-mh.ru
10 основных навыков, необходимых для робототехников
Робототехники олицетворяют собой сочетание противоположностей. Как специалисты, они искушены в тонкостях своей специализации. Как универсалы, они способны охватить проблему в целом в той степени, что позволяет имеющаяся обширная база знаний. Предлагаем вашему вниманию интересный материал на тему умений и навыков, которые необходимы настоящему робототехнику.
А кроме самого материала также комментарии одного из наших робо-экспертов, куратора екатеринбургского хакспейса MakeItLab, Олега Евсегнеева.
Инженеры-робототехники, как правило, попадают в две категории специалистов: думающих (теоретиков) и делающих (практиков). Это означает, что робототехники должны отличаться хорошим сочетанием двух противоположных стилей работы. «Склонные к исследованиям» люди вообще любят решать проблемы, думая, читая и изучая. С другой стороны, специалисты-практики любят решать проблемы лишь «испачкав руки», можно так сказать.
В робототехнике нужен тонкий баланс между напряженными исследованиями и расслабленной паузой, то есть работа над реальной задачей. В представленный перечень попали 25 профессиональных умений, сгруппированных в 10 существенных для роботостроителей навыков.
1. Системное мышление
Один из менеджеров проекта однажды заметил, что многие, связанные с робототехникой люди, оказываются впоследствии менеджерами проектов или системными инженерами. В этом есть особый смысл, так как роботы являются очень сложными системами. Занимающийся роботами специалист должен быть хорошим механиком, электронщиком, электриком, программистом и даже обладать познаниями в психологии и когнитивной деятельности.
Хороший робототехник в состоянии понять и теоретически обосновать, как совместно и слаженно взаимодействуют все эти разнообразные системы. Если инженер-механик может вполне обоснованно сказать: «это не моя работа, тут нужен программист или электрик», то робототехник должен хорошо разбираться во всех этих дисциплинах.
Комментарий Олега Евсегнеева: Вообще, системное мышление является важным навыком для всех инженеров. Наш мир – одна большая сверхсложная система. Навыки системной инженерии помогают правильно понять, что и как связано в этом мире. Зная это, можно создавать эффективные системы управления реальным миром.
2. Мышление программиста
Программирование является довольно важным навыком для робототехника. При этом не имеет значения, занимаетесь ли вы низкоуровневыми системами управления (используя лишь MATLAB для проектирования контроллеров) или являетесь специалистом по информатике, проектирующим высокоуровневые когнитивные системы. Занимающиеся роботами инженеры могут быть привлечены к работе по программированию на любом уровне абстракции. Основное различие между обычным программированием и программированием роботов заключается в том, что робототехник взаимодействует с оборудованием, электроникой и беспорядком реального мира.

Сегодня используется более 1500 языков программирования. Несмотря на то, что вам явно не нужно будет учить их все, хороший робототехник обладает мышлением программиста. А они будут комфортно чувствовать себя при изучении любого нового языка, если вдруг это потребуется. И тут мы плавно переходим к следующему навыку.
Комментарий Олега Евсегнеева: Я бы добавил, что для создания современных роботов требуется знание языков низкого, высокого и даже сверхвысокого уровня. Микроконтроллеры должны работать очень быстро и эффективно. Чтобы этого достичь, нужно углубляться в архитектуру вычислительного устройства, знать особенности работы с памятью и низкоуровневыми протоколами. Сердцем робота может быть тяжелая операционная система, например, ROS. Здесь уже может понадобиться знание ООП, умение пользоваться серьезными пакетами машинного зрения, навигации и машинного обучения. Наконец, чтобы написать интерфейс робота в веб и связать его с сетью интернет, неплохо будет научиться скриптовым языкам, тому же python.
3. Способность к самобучению
О робототехнике невозможно знать все, всегда есть что-то неизвестное, что придется изучать, когда возникнет в том необходимость при реализации очередного проекта. Даже после получения высшего образования по специальности робототехника и нескольких лет работы в качестве аспиранта многие только начинают по-настоящему понимать азы робототехники.
Стремление к постоянному изучению чего-то нового является важной способностью на протяжении всей вашей карьеры. Поэтому использование эффективных лично для вас методов обучения и хорошее восприятие прочитанного помогут вам быстро и легко получать новые знания, когда в этом возникает необходимость.
Комментарий Олега Евсегнеева: Это ключевой навык в любом творческом деле. С помощью него можно получить другие навыки
4. Математика
В робототехнике имеется не так много основополагающих навыков. Одним из таких основных навыков является математика. Вам, вероятно, трудно будет добиться успеха в робототехнике без надлежащего знания, по крайней мере, алгебры, математического анализа и геометрии. Это связано с тем, что на базовом уровне робототехника опирается на способность понимать и оперировать абстрактными понятиями, часто представляемыми в виде функций или уравнений. Геометрия является особенно важной для понимания таких тем, как кинематика и технические чертежи (которых вам, вероятно, придется много сделать в течение карьеры, включая те, что будут выполнены на салфетке).
Комментарий Олега Евсегнеева: Поведение робота, его реакция на окружающие раздражители, способность учиться – это все математика. Простой пример. Современные беспилотники хорошо летают благодаря фильтру Калмана – мощному математическому инструменту для уточнения данных о положении робота в пространстве. Робот Asimo умеет различать предметы благодаря нейронным сетям. Даже робот-пылесос использует сложную математику, чтобы правильно построить маршрут по комнате.
5. Физика и прикладная математика
Есть некоторые люди (чистые математики, например), которые стремятся оперировать математическими понятиями без привязки к реальному миру. Создатели роботов не относятся к такому типу людей. Познания в физике и прикладной математике важны в робототехнике, потому что реальный мир никогда не бывает таким точным, как математика. Возможность решить, когда результат расчета достаточно хорош, чтобы на самом деле работать – это ключевой навык для инженера-робототехника. Что плавно подводит нас к следующему пункту.
Комментарий Олега Евсегнеева: Есть хороший пример – автоматические станции для полета на другие планеты. Знание физики позволяет настолько точно рассчитать траекторию их полета, что спустя годы и миллионы километров аппарат попадает в точно заданную позицию.
6. Анализ и выбор решения
Быть хорошим робототехником означает постоянно принимать инженерные решения. Что выбрать для программирования — ROS или другую систему? Сколько пальцев должен иметь проектируемый робот? Какие датчики выбрать для использования? Робототехника использует множество решений и среди них почти нет единственно верного.
Благодаря обширной базе знаний, используемой в робототехнике, вы могли бы найти для себя более выгодное решение определенных проблем, чем специалисты из более узких дисциплин. Анализ и принятие решений необходимы для того, чтобы извлечь максимальную пользу из вашего решения. Навыки аналитического мышления позволят вам анализировать проблему с различных точек зрения, в то время как навыки критического мышления помогут использовать логику и рассуждения, чтобы сбалансировать сильные и слабые стороны каждого решения.
Комментарий Олега Евсегнеева: Анализ – это способность разбирать интересующий предмет на кирпичики. Способность достать до сути механизма или явления. Без этого невозможно даже правильно составить задание на проектирование робота. А ошибки на этом этапе часто бывают фатальными для всей идеи.
7. Хорошие коммуникационные способности
Специалисту по робототехнике с его универсальными познаниями часто приходится объяснять свои концепции неспециалистам в какой-либо области. Например, вам может быть придется объяснять инженеру-механику проблемы высокоуровневого программирования или специалисту в области вычислительных систем недостатки механической конструкции. Хороший робототехник выполняет роль канала связи между различными дисциплинами. Поэтому коммуникативные навыки имеют жизненно важное значение. Очень важно уметь эффективно использовать свои речевые и письменные навыки. Также большим плюсом будут хорошие навыки в обучении.
Комментарий Олега Евсегнеева: Прямое общение – часто самый быстрый и эффективный способ передать информацию. Замкнутый человек лишается критики со стороны коллег, и тем самым рискует надолго зависнуть на пути неправильного решения. Неправильные решения приводят к провалу проекта, и тем самым сильно бьют по мотивации.
8. Технология проектирования
Быть специалистом в технологии проектирования означает способность проектировать вещи, которые действительно работают. Это также подразумевает способность выяснить, почему что-то работает неправильно и найти возможные решения, требующие навыков в ремонте. Робототехника включает в себя широкий спектр технологий, так что навыки в технологии проектирования означают, что вы можете эффективно изолировать источник проблемы и предложить эффективные решения.
Комментарий Олега Евсегнеева: С самых первых проектов любой робототехник должен стремиться обязательно пройти через этап проектирования. Только так из него может вырасти матерый конструктор, способный эффективно донести все свои идеи до коллектива. Сбор, что называется, на коленке, в случае сложных систем часто приводит к провалу. Современная робототехника основана на высокоточных компонентах, которые требуют тщательной компоновки и продумывания.
9. Решение сложных проблем
Как можно понять, исходя из предыдущих навыков, многие становятся робототехниками, используя свои навыки решения сложных задач. Это относится к предвидению проблем, чтобы скорректировать их прежде, чем они могут возникнуть, и устранить их, если они все-таки возникают.
10. Настойчивость
Наконец, с учетом сложной природы робототехники, настойчивость – это довольно необходимый навык. Это может быть настойчивость в попытках найти решение особенно трудной задачи или упорство в попытке объяснить коллегам сложную проблему. Хороший робототехник будет также поддерживать свое постоянство и надежность, проверяя себя, чтобы быть компетентным и адаптируемым, что и требуется от робототехника.
Комментарий Олега Евсегнеева: Настойчивость тесно связана с мотивацией. Инженер всегда должен уметь отвечать на вопрос «зачем?». Имея ответ и твердую цель, можно добиться решения самых сложных задач, заодно собрав вокруг своей идеи сообщество единомышленников.
А что вы думаете по поводу необходимых навыков для робототехника? Если вам есть что добавить — ждем ваши мысли в комментариях!
www.robogeek.ru
Robotics – Robots, robots, robots / Habr
Quite a long time ago, seven years ago to be precise, i wrote a series of posts describing the state of android robotics in the world. At the time i was a high school student, with a keen interest in android robotics, who absorbed a bit of knowledge from English, Japanese, Chinese, Korean and Russian internetz and wanted to spill it somewhere.
While the posts were not too professional, and not to my standards of today, they were worthy enough to get stolen and even get translated by unapproved English Habrahabr mirrors, and to this day, appear in searches.
After those posts were written, Habrahabr got split. Removal of everyone outside of pure coding who were considered «not cake enough» to Geektimes felt like an insult and so i left the platform. Yet, the website was reunited last year, and much to a personal surprise, fairly recently an English version of Habrahabr was released.
During all these years i managed to be kicked from one university, finished another with a thick thesis on «Usage of Robotics in Disaster Conditions», lived in the Republic of Korea for half a year, and most importantly, not only expanded my knowledge of android robotics in such ways that the Robotics folder on the main hard drive is now more than 300GB in size, but also expanded the knowledge via journeying and personally meeting projects of the past and present, creating quite a decent archive on Youtube and met not only with the robots, but the engineers and scientists as well.
While i am still nowhere to be a robotics engineer, (and in the daily life i attempt to be a traditional slice-of-life artist), i feel that my tiny gigabytes of knowledge might be worthy of sharing, and today on Habr i’m publishing the real story of Android Robotics from the beginning up to 2019.
habr.com
2.1: Что такое робототехника?
Робот — это программируемое механической устройство, способное выполнять задачи и взаимодействовать с внешней средой без помощи со стороны человека. Робототехника — это научная и техническая база для проектирования, производства и применения роботов.
Слово «робот» было впервые использовано чешским драматургом Карлом Чапеком в 1921. В его произведении «Универсальные роботы Россума» речь шла о классе рабов, искусственно созданных человекоподобных слуг, сражающихся за свою свободу. Чешское слово «robota» означает «принудительное рабство». Слово «робототехника» было впервые применено известным автором научной фантастики Айзеком Азимовым в 1941 году.
Базовые компоненты робота
Компоненты робота: тело/рама, система управления, манипуляторы, и ходовая часть.
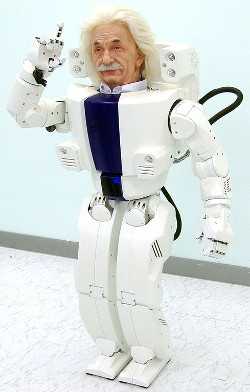
Тело/рама: Тело, или рама, робота может иметь любую форму и размер. Изначально, тело/рама обеспечивает конструкцию робота. Большинство людей знакомы с человекоподобными роботами, используемыми для съемок кинофильмов, но в действительность большинство роботов не имеют ничего общего с человеческим обликом. (Робонафт НАСА, представленный в предыдущем разделе, является исключением). Как правило, в проекте робота внимание уделяется функциональности, а не внешности.
Система управления: Система управления робота является эквивалентом центральной нервной системы человека. Она предназначена для координирования управления всеми элементами робота. Датчики реагируют на взаимодействие робота с внешней средой. Ответы датчиков отправляются в центральный процессор (ЦП). ЦП обрабатывает данные с помощью программного обеспечения и принимает решения на базе логики. То же самое происходит при вводе пользовательской команды.
Манипуляторы: Для выполнения задачи большинство роботов взаимодействует с внешней средой, а также окружающим миром. Иногда требуется перемещение объектов внешней среды без непосредственного участия со стороны операторов. Манипуляторы не являются элементом базовой конструкции робота, как его тело/рама или система управления, то есть робот может работать и без манипулятора. В настоящем учебном курсе акцент делается на тему манипуляторов, особенно блок 6.
Ходовая часть: Хотя некоторые роботы могут выполнять поставленные задачи, не изменяя свое местоположение, зачастую от роботов требуется способность перемещаться из одного места в другое. Для выполнения данной задачи роботу необходима ходовая часть. Ходовая часть представляет собой приводное средство перемещения. Роботы-гуманоиды оснащены ногами, тогда как ходовая часть практически всех остальных роботов реализована с помощью колес.
Возможности применения и примеры роботов
На сегодняшний день, роботы имеют массу применений. Области применения делятся на три основные категории:
- промышленные роботы;
- исследовательские роботы;
- образовательные роботы.
Промышленные роботы
В промышленности, для выполнения огромного количества работ необходимы высокая скорость и точность. В течение многих лет ответственность за выполнение подобных работ несли люди. С развитием технологий, использование роботов позволило ускорить и повысить точность многих производственных процессов. Это и упаковка, сборка, окраска и укладка на поддоны. Изначально, роботы выполняли только особые виды повторяющихся работ, где требовалось соблюдение простого заданного набора правил. Тем не менее, с развитием технологий промышленные роботы стали гораздо более подвижны, и теперь они способны принимать решения на основе сложного ответа от датчиков. Сегодня промышленные роботы часто оснащены системами технического зрения. К концу 2014 года международная робототехническая федерация прогнозировала объем применения промышленных роботов по всему миру свыше 1,3 миллиона единиц!
Роботы могут использоваться для выполнения сложных, опасных задач, а также задач, которые человек выполнить не в состоянии. Например, роботы способны обезвреживать бомбы, обслуживать ядерные реакторы, исследовать глубины океана и достигать самых дальних уголков космоса.
Исследовательские роботы
Роботы имеют широкое применение в мире исследований, так как их часто используют для выполнения задач, в решении которых человек беспомощен. Наиболее опасные и сложные среды находятся под поверхностью Земли. В целях изучения космического пространства и планет солнечной системы в НАСА на протяжении использовались космические аппараты, посадочные модули и вездеходы с функциями роботов.
Роботы Pathfinder и Sojourner
Для марсианской миссии Pathfinder была разработана уникальная технология, позволяющая осуществить доставку оборудованного посадочного модуля и роботизированного вездехода, Sojourner, на поверхность Марса. Sojourner был первым вездеходом, отправленным на планету Марс. Масса вездехода Sojourner на поверхности земли составляет 11 кг (24,3 фунта), на поверхности Марса — прибл. 9 фунтов, а его размеры сопоставимы с размерами детской коляски. Вездеход имеет шесть колес и может перемещаться со скоростью до 0,6 метров (1,9 футов) в минуту. Миссия была запущена на поверхности Марса 4 июля 1997 года. Pathfinder не только выполнил свою прямую задачу, но также вернулся на Землю с огромным количеством собранных данных и превысил свой проектный срок эксплуатации.
Вездеходы Spirit и Opportunity
Марсианские исследовательские вездеходы (MER) Spirit и Opportunity были отправлены на Марс летом 2003 года и приземлились в январе 2004 года. Их миссия состояла в исследовании и классификации большого количества камней и почв с целью обнаружения остатков воды на Марсе, в надежде на отправку на планету человеческой миссии. Несмотря на то, что запланированная длительность миссии составляла 90 дней, в действительности она превысила шесть лет. За это время было собрано бесчисленное количество геологических данных о Марсе.
Роботизированная рука космического корабля
Когда проектировщики НАСА впервые приступили к проектированию космического корабля, они столкнулись с задачей, выраженной в необходимости безопасной и эффективной доставки в космическое пространство огромного, но, к счастью, невесомого объема груза и оборудования. Система дистанционного манипулирования (RMS), или Канадарм (канадский дистанционный манипулятор), совершила свой первый выход в космос 13 ноября 1981 года.
Рука имеет шесть подвижных соединений, имитирующих человеческую руку. Два соединения расположены в плече, одно — в локте, и еще три — в кисти. На конце кисти установлено захватное устройство, способное захватывать или зацеплять требуемый груз. В условиях невесомости рука способна поднимать 586 000 фунтов груза и выполнять их размещение с удивительной аккуратностью. Общая масса руки на поверхности Земли составляет 994 фунта.
RMS использовалась для запуска и поиска спутников, а также оказалась бесценным помощником для астронавтов в процессе ремонта космического телескопа Хаббла. Последняя миссия Канадарм в составе космического корабля стартовала в июле 2011 года и стала девяностой миссией этого робота.
Мобильные обслуживающие системы
Мобильная обслуживающая система (MSS) представляет собой систему, аналогичную RMS, и известна также как Канадарм 2. Система была спроектирована для установки на международной космической станции в качестве объектного манипулятора. MSS предназначена для обслуживания оборудования и приборов, установленных на международной космической станции, а также для оказания помощи при транспортировке продовольствия и оборудования в пределах станции.
Dextre
В рамках космической миссии STS-123 в 2008, космический корабль Endeavor осуществлял перевозку последней части гибкого манипулятора специального назначения Dextre.
Dextre — это робот, оснащенный двумя не большими руками. Робот способен выполнять задачи по точной сборке, которые до этого выполняли астронавты во время входа в открытый космос. Dextre может транспортировать объекты, пользоваться инструментами и осуществлять установку или удаление оборудования на космической станции. Dextre также оснащен освещением, видео-оборудованием, инструментальной базой, а также четырьмя держателями для инструментов. Датчики позволяют роботу «чувствовать» объекты, с которыми он имеет дело, и автоматически реагировать на движения или изменения. Команда может наблюдать за работой с помощью четырех установленных камер.
По конструкции робот напоминает человека. Верхняя часть его тела может поворачиваться в талии, а плечи удерживают руки, расположенные с двух сторон.
Роботы в образовании
Робототехника стала увлекательным и доступным инструментом обучения и поддержки STEM, проектирования и подходов к решению задач. В робототехнике, учащиеся получают возможность реализовать себя в роли проектировщиков, артистов и техников одновременно, используя собственные руки и голову. За счет этого открываются огромные возможности применения научных и математических основ.
В современной системе образования, с учетом финансовых ограничений, средние и высшие школы находятся в постоянном поиске экономически выгодных путей преподавания сложных программ, сочетающих технологии с множеством дисциплин, учащимся для их подготовки к профессиональной деятельности. Преподаватели сразу видят преимущества робототехники и данного учебного курса, так как в них реализован межпредметный метод сочетания различных дисциплин. В дополнение, робототехника предлагает наиболее доступное и подходяще для повторного использования оборудование.
Сегодня более чем когда либо, школы применяют робототехнические программы в классе для «оживления» учебных курсов и обеспечения соответствия широкому спектру академических стандартов, необходимых для учащихся. Робототехника не только является уникальной и широкой базой для преподавания разнообразных технических дисциплин, но также областью техники, оказывающей значительное влияние на развитие современного общества.
Почему робототехника важна?
Как видно из раздела «Возможности применения и примеры роботов», робототехника является новой областью техники, применяемой во многих сферах жизни человека. Важным фактором развития общества является образованность всех его членов в части существующих технологий. Но это не единственная причина возрастающей значимости робототехники. Робототехника уникальным образом сочетает в себе основы дисциплин STEM (естественные науки, технологии, инженерия и математика). В процессе обучения в классе учащиеся изучают различные дисциплины и их взаимосвязи, используя современные, технологичные и увлекательные инструменты. Помимо этого, визуальное представление проектов, которое требуется от учащи, стимулирует их к экспериментам и проявлению изобретательности в процессе поиска эстетичных и работоспособных решений. Комбинируя эти аспекты работы, учащиеся поднимают свои знания и возможности на новый уровень.
vex.examen-technolab.ru
Основы робототехники. Роботизированная техника
Робототехники олицетворяют собой сочетание противоположностей. Как специалисты, они искушены в тонкостях своей специализации. Как универсалы, они способны охватить проблему в целом в той степени, что позволяет имеющаяся обширная база знаний. Предлагаем вашему вниманию интересный материал на тему умений и навыков, которые необходимы настоящему робототехнику.
А кроме самого материала также комментарии одного из наших робо-экспертов, куратора екатеринбургского , Олега Евсегнеева.
Инженеры-робототехники, как правило, попадают в две категории специалистов: думающих (теоретиков) и делающих (практиков). Это означает, что робототехники должны отличаться хорошим сочетанием двух противоположных стилей работы. «Склонные к исследованиям» люди вообще любят решать проблемы, думая, читая и изучая. С другой стороны, специалисты-практики любят решать проблемы лишь «испачкав руки», можно так сказать.
В робототехнике нужен тонкий баланс между напряженными исследованиями и расслабленной паузой, то есть работа над реальной задачей. В представленный перечень попали 25 профессиональных умений, сгруппированных в 10 существенных для роботостроителей навыков.
1. Системное мышление
Один из менеджеров проекта однажды заметил, что многие, связанные с робототехникой люди, оказываются впоследствии менеджерами проектов или системными инженерами. В этом есть особый смысл, так как роботы являются очень сложными системами. Занимающийся роботами специалист должен быть хорошим механиком, электронщиком, электриком, программистом и даже обладать познаниями в психологии и когнитивной деятельности.
Хороший робототехник в состоянии понять и теоретически обосновать, как совместно и слаженно взаимодействуют все эти разнообразные системы. Если инженер-механик может вполне обоснованно сказать: «это не моя работа, тут нужен программист или электрик», то робототехник должен хорошо разбираться во всех этих дисциплинах.
Вообще, системное мышление является важным навыком для всех инженеров. Наш мир – одна большая сверхсложная система. Навыки системной инженерии помогают правильно понять, что и как связано в этом мире. Зная это, можно создавать эффективные системы управления реальным миром.
2. Мышление программиста
Программирование является довольно важным навыком для робототехника. При этом не имеет значения, занимаетесь ли вы низкоуровневыми системами управления (используя лишь MATLAB для проектирования контроллеров) или являетесь специалистом по информатике, проектирующим высокоуровневые когнитивные системы. Занимающиеся роботами инженеры могут быть привлечены к работе по программированию на любом уровне абстракции. Основное различие между обычным программированием и программированием роботов заключается в том, что робототехник взаимодействует с оборудованием, электроникой и беспорядком реального мира.
Сегодня используется более 1500 языков программирования. Несмотря на то, что вам явно не нужно будет учить их все, хороший робототехник обладает мышлением программиста. А они будут комфортно чувствовать себя при изучении любого нового языка, если вдруг это потребуется. И тут мы плавно переходим к следующему навыку.
Комментарий Олега Евсегнеева: Я бы добавил, что для создания современных роботов требуется знание языков низкого, высокого и даже сверхвысокого уровня. Микроконтроллеры должны работать очень быстро и эффективно. Чтобы этого достичь, нужно углубляться в архитектуру вычислительного устройства, знать особенности работы с памятью и низкоуровневыми протоколами. Сердцем робота может быть тяжелая операционная система, например, ROS. Здесь уже может понадобиться знание ООП, умение пользоваться серьезными пакетами машинного зрения, навигации и машинного обучения. Наконец, чтобы написать интерфейс робота в веб и связать его с сетью интернет, неплохо будет научиться скриптовым языкам, тому же python.
3. Способность к самобучению
О робототехнике невозможно знать все, всегда есть что-то неизвестное, что придется изучать, когда возникнет в том необходимость при реализации очередного проекта. Даже после получения высшего образования по специальности робототехника и нескольких лет работы в качестве аспиранта многие только начинают по-настоящему понимать азы робототехники.
Стремление к постоянному изучению чего-то нового является важной способностью на протяжении всей вашей карьеры. Поэтому использование эффективных лично для вас методов обучения и хорошее восприятие прочитанного помогут вам быстро и легко получать новые знания, когда в этом возникает необходимость.
Комментарий Олега Евсегнеева: Это ключевой навык в любом творческом деле. С помощью него можно получить другие навыки
4. Математика
В робототехнике имеется не так много основополагающих навыков. Одним из таких основных навыков является математика. Вам, вероятно, трудно будет добиться успеха в робототехнике без надлежащего знания, по крайней мере, алгебры, математического анализа и геометрии. Это связано с тем, что на базовом уро
www.tarifox.ru
Я хочу стать робототехником — что дальше? — Look At Me
Владимир Белый
Основатель компании Alpha Smart Systems, глава венчурного фонда Alpha Robotics Venture Foundation, вместе с командой единомышленников создаёт антропоморфного робота Alphabot и реализует другие проекты из этой сферы
«Робототехника — очень широкое понятие, в него входит и разработка программного обеспечения и мобильного софта, и создание сложных инженерных решений, программирование искусственного интеллекта и дизайн. Это очень перспективное направление не только для инженеров и программистов, но и для дизайнеров, маркетологов и даже психологов. Мы живём в интересное время: на наших глазах зарождается абсолютно новый рынок, продукты которого изменят нашу жизнь. Подобное случилось, когда появились, например, персональные компьютеры.
Сегодня я и моя команда работаем над усовершенствованием наших роботов. Мы делаем это, чтобы облегчить жизнь людей, оставить им больше времени для общения с родными и любимыми. Роботы должны заменить нас в рутинной и опасной работе, как уже произошло во многих видах производства. Сейчас нельзя представить нашу жизнь без промышленных роботов, которые занимаются сборкой, сваркой, сортировкой разных продуктов — они оптимизируют предприятия, позволяют сократить расходы и риски.
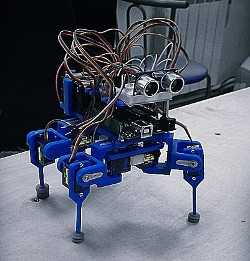
Помимо промышленных роботов, есть так называемые биоморфные роботы — прообразы животных и насекомых, которые благодаря своим размерам и прочим особенностям могут выполнять особые задачи. Однако антропоморфные роботы, то есть похожие на людей, это наиболее удобный вариант воплощения искусственного интеллекта. Дело в том, что весь окружающий нас быт создан с расчётом на человека: на его рост, особенности анатомии. Поэтому гораздо более выгодно создать машину, способную передвигаться и работать в тех же условиях, что и мы, чем приспосабливать, скажем, робота на гусеничной платформе или на колёсной базе, к человеческому быту. Кроме того, сработал психологический фактор: люди всегда стремились создать себе подобного.
www.lookatme.ru
Первые роботы и история развития робототехники
В массовом сознании слово «робот» ассоциируется в основном с научными достижениями и идеями 20-21 веков. Особенно часто этот термин мало разбирающийся в технических областях человек встречает в произведениях научной фантастики – романах Айзека Азимова, сериях фильмов «Терминатор», «Трансформеры» и т.д. Более продвинутые из них еще могут припомнить советские «Луноходы», промышленные или медицинские аппараты, зверо- или человекоподобных роботов из рекламных роликов компании Boston Dynamics. Однако, как и многие другие великие идеи человечества, концепция автоматизированных механизмов, способных самостоятельно выполнять различные операции, появилась гораздо раньше и прошла длительный путь своего развития.
Определение понятия
Прежде, чем говорить о том, какими были самые первые роботы, следует определить, что именно подразумевается под данным понятием. Это имеет важное значение для понимания развития данной технологии и ее уникальности. Первое появление слова «робот» относится к 1920 году, когда чешский писатель Карел Чапек употребил его в фантастической пьесе «Rossumovi univerzální roboti (R.U.R)». Там оно обозначало искусственно созданного человека, чей труд использовался на тяжелых и опасных производствах взамен человеческого (robota в переводе с чешского – каторга). И хотя в этом произведении роботы изготавливались на фабриках из выращенных органических тканей, само понятие впоследствии было популяризировано именно в отношении механических устройств.
Робота следует отличать от простых механизмов и автоматов. Это устройство обладает способностью к более тесному и комплексному взаимодействию с оператором и внешней средой. Если простой автоматический механизм при выполнении определенного действия слепо следует заранее заложенному в нем алгоритму, то робот способен воспринимать внешние сигналы и в соответствии с ними адаптировать свои действия. Таким образом его взаимодействие с внешней средой становится более гибким, точным и универсальным. Даже самые первые в мире роботы, о которых будет сказано далее, имели примитивные аналоги органов чувств, без которых это принципиальное отличие было бы невозможным.
У истоков: первые прообразы роботов
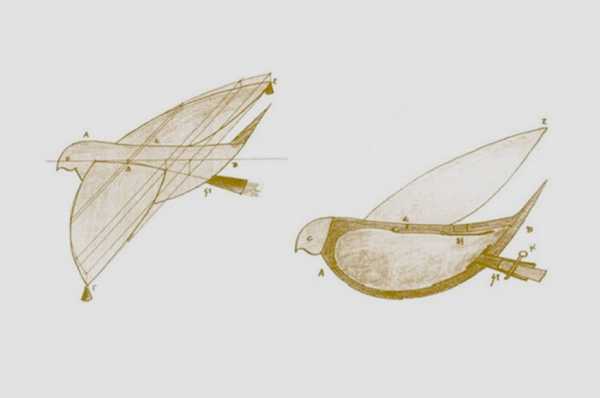
Однако история создания роботов тесно переплетается с развитием механики и логически из нее проистекает. Поэтому для ее понимания необходимо углубиться на несколько веков назад, а именно в эпоху античности, когда процветала колыбель наук – Древняя Греция. В этой стране появились автоматические устройства, созданные для выполнения практических задач и развлечения. В качестве примера можно привести описанную Филоном Византийским механическую женщину-слугу, которая наливала из кувшина вино во вставленный в ее руку стакан. Древнегреческий математик и изобретатель Архит Тарентский еще в 5 веке до н. э. изобрел деревянного голубя, который запускался в небо с помощью паровой катапульты. Многие историки технологий считают, что первый робот в истории был создан именно в этот момент, хотя корректнее считать его прототипом крылатой ракеты или реактивного снаряда.
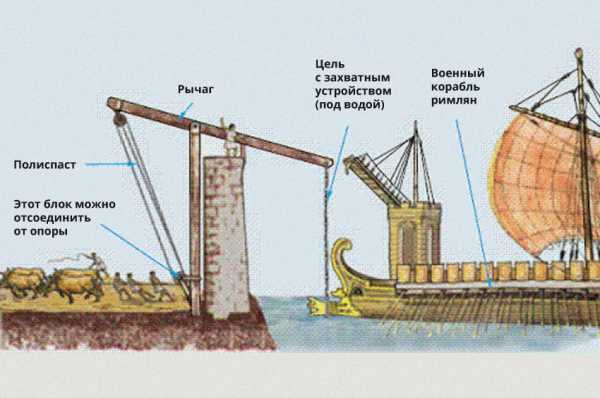
Еще более сложное и грандиозное автоматическое устройство существовало в научной столице античного мира – великом городе Александрия. На расположенном здесь в начале нашей эры знаменитом Фаросском маяке были размещены величественные женские фигуры. Они могли указывать направление ветра и движение небесных светил (Солнца и Луны), отсчитывать время и даже сигнализировать морякам об опасности во время шторма или тумана с помощью громкого трубного звука. В древнегреческом городе Сиракузы на острове Сицилия жил великий греческий изобретатель и ученый Архимед, также прославившийся созданием автоматических механизмов. В частности, ему приписывается создание первого прообраза настоящего боевого робота. Устройство под названием «коготь», устанавливаемое на крепостной стене, захватывало длинным крюком осаждавшие город римские корабли, поднимало их в воздух и переворачивало, стряхивая экипаж за борт.
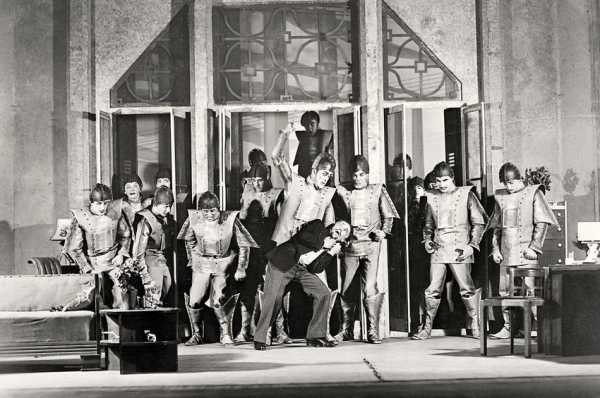
Другой гениальный грек, Герон Александрийский, изобрел первый в истории программируемый автомат. Тележка, вывозившая на сцену механизированные марионетки, управлялась с помощью веревки и колышков. Изменяя положение последних, Герон регулировал наматывание тросиков на независимые оси повозки, тем самым задавая ей траекторию движения. Этот принцип в чем-то похож на перфорированные ленты и карты – средства записи и хранения информации, используемые в автоматических станках и ЭВМ вплоть до 80-х годов ХХ века.
История робототехники была бы неполной без достижений других государств того времени. Так, еще в конце 2 тысячелетия до н. э., задолго до древнегреческих механизмов, в Древнем Египте жрецы изготовили статую, которая поднятием руки указывала на наследника фараона во время религиозных церемоний. А в Китае примерно в это же время местные мастера создавали первые прототипы роботов, приводимые в действие силой пороховых взрывов. Великий мудрец Лао-Цзы упоминал о механическом человеке, разработанном для императора на рубеже 1 и 2 тысячелетия до н. э.
И все же именно Древнюю Грецию можно считать родиной робототехники, потому как здесь были не просто построены многие автоматические устройства, но теоретизированы принципы их создания и функционирования.
Античные изобретатели и ученые разработали многие виды передач и двигателей (в том числе паровой, гидравлический и пневматический), сформулировали основные законы классической механики, благодаря чему последующие поколения смогли воспроизвести и развить их опыт.
«Роботы» Средневековья
Вопреки распространенному мнению, Средние века не были эпохой всеобщего упадка и технологического регресса. Наука, в том числе механика, хотя и с некоторой задержкой в первые века после падения античных держав, продолжала свое развитие. Удивительно, но многие сложные устройства появились на свет благодаря силе, которая в массовом сознании ассоциируется только с мракобесием – а именно Церкви. В те времена католические монастыри были одним из центров научной и инженерной мысли. В частности, легенды приписывают виднейшему ученому и теологу Альберту Великому создание «механической служанки», которая умела самостоятельно передвигаться и даже воспроизводить речь. Задокументированным, и, следовательно, более достоверным, выглядит свидетельство средневекового архитектора Виллара де Онекура (13 век н. э.), который в своем труде описал зооморфные механизмы, а также фигуру ангела, поворачивающуюся вслед за движением солнца. К тому же 13 веку относится увеселительный сад в поместье графа Роберта II д’Артуа, заполненный автоматическими обезьянами, птицами и механизированными фонтанами.
Большое развитие механика получила в это время и на Востоке. Византия, практически не затронутая потрясениями Раннего Средневековья, славилась автоматонами, встречавшими иностранных гостей в императорском дворце. Согласно свидетельствам, около царского трона были расположены два металлических льва, которые умели реветь и бить хвостами, а в кронах деревьев находились механизированные птицы, певшие и щебетавшие на разные голоса. В мусульманских странах того времени механика и математика вышли на качественно новый уровень, благодаря чему их мастера создавали удивительные устройства. Так, братья Бану Муса в 9 веке н. э. изобрели искусственного флейтиста, а видный ученый того времени Али ибн Халаф аль-Маради, живший в 11 веке, в своей «Книге тайн» описал около 30 сложных автоматонов.

Здесь же следует упомянуть и легенду о «железном мужике», созданном придворными мастерами Ивана Грозного. Согласно ей, человекоподобный механический слуга при дворе русского царя подавал ему чашу с вином и кафтан, подметал пол, кланялся гостям и даже «побивал медведя». Звучит фантастично, но следует учитывать, что эта легенда основана на письмах голландского купца Йохана Вема – человека крайне прагматичного и не склонного к фантазиям.
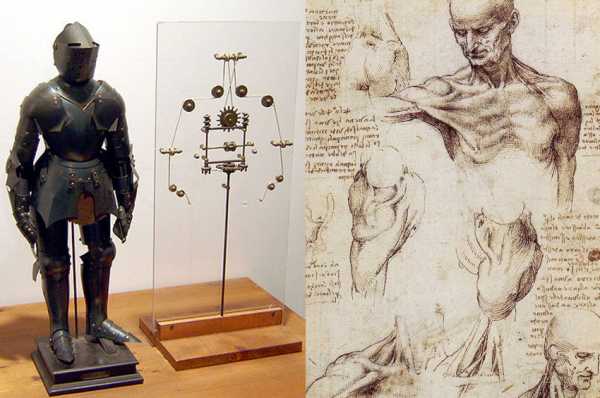
На закате эпохи Средневековья автоматические устройства, воспроизводящие достаточно сложные действия, популяризировались и легендарным Леонардо да Винчи.
Леонардо да Винчи, будучи гением инженерной мысли, в своих зарисовках предложил схемы самых разных механизмов, одним из которых является фигура закованного в латы рыцаря, которая могла двигать руками и шеей, садиться и даже открывать рот. Собранный образец демонстрировался изобретателем при дворе Людовика Сфорца, герцога Миланского, в 1495 году. В 20 веке по сохранившимся чертежам была воспроизведена точная и функциональная копия этого устройства, сегодня хранящаяся в Миланском музее.
Новое время: золотой век автоматонов
Однако настоящую популярность и бурное развитие автоматические механизмы получили с началом эпохи Возрождения. Наука, вырвавшись из монополии Церкви, получила дополнительный импульс к развитию, в том числе за счет переосмысления достижения античных ученых. И на первую роль в новой волне старинной робототехники вышли часовщики. Здесь стоит упомянуть о двух важных изобретениях, которые способствовали развитию технологии автоматонов – пружинному и маятниковому заводным механизмам. До этого подобные устройства приводились в движение гирями, что позволяло создавать только крупные и относительно несложные изделия. Новые накопители энергии (пружина и маятник) стали настоящим прорывом в миниатюризации автоматических механизмов.
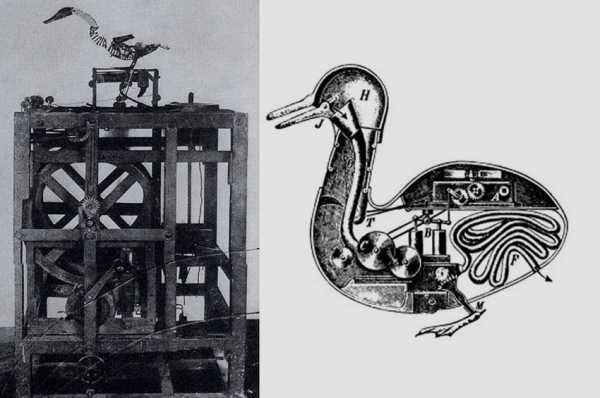
Особенно прославился на этом поприще мастер Жак де Вокансон, который жил в 18 веке – к слову, в детстве обучавшийся в иезуитской школе. Особенную популярность получили два его изобретения:
- механическая утка, способная взмахивать крыльями, клевать зерно с руки и даже испражняться;
- автоматический музыкант, умеющий наигрывать различные мелодии на флейте и свирели.
Другим известным мастером был швейцарец Пьер Жаке Дро, живший в том же 18 веке и основавший знаменитую часовую компанию Jaquet Droz. В то время он прославился не только своими хронометрами, но и множеством сложнейших устройств, среди которых особенно известно три его творения:
- «Писарь» – автоматическая фигура мальчика, содержащая около 4 000 деталей, была способна написать любой текст из 40 знаков, самостоятельно макая перо в чернильницу;
- «Художник» – похожий автомат, только вместо текста наносивший на бумагу различные рисунки, например портреты людей, изображения животных и т. д.;
- «Девушка-музыкант» – автомат в виде органистки, который умел наигрывать на небольшом органе 5 различных мелодий, при этом двигая головой и телом, а в конце выступления изящно кланяясь.

Отличительной чертой этих автоматонов была возможность их программировать, для чего использовались барабаны или диски с насечками, в которых была закодирована последовательность действий. Поменяв их расположение, мастер мог заставить свои устройства написать различные тексты, сыграть другую мелодию и т. д. И все же утверждать, что именно он создал первого робота, нельзя – его механизмы еще слишком мало взаимодействовали с внешней средой, а их функции были сугубо развлекательными.
Технология создания подобных устройств получила широкое распространение не только в Европе, но и мире. В конце 18 века в Японии была создана автоматическая девушка, способная стрелять из лука. В Эрмитаже выставлены знаменитые часы с павлином, купленные Екатериной Великой в Британии. Вклад российских мастеров здесь тоже есть – при перевозке в Россию механизм сильно повредился, но знаменитый изобретатель Кулибин смог полностью восстановить его.
Изготовление автоматонов развивалось по пути не только усложнения, но и миниатюризации устройств. Если первые образцы таких механизмов занимали достаточно много места, то к 19 веку их часто умещали в карманные часы. В основном это были сугубо развлекательные устройства, изготавливаемые для аристократов, передвижных цирков, выставок и т. д. Однако пройдет совсем немного времени, и автоматы начнут помогать людям.
Современный этап развития робототехники
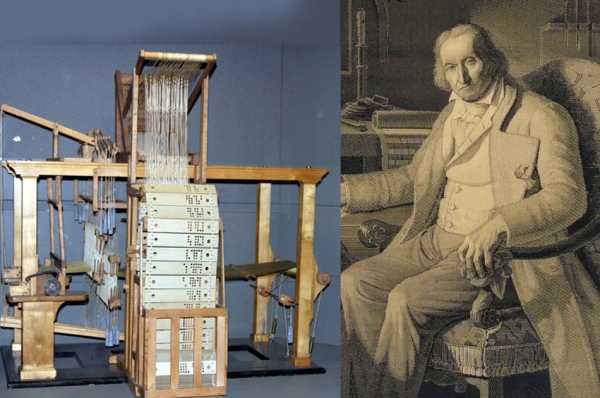
Механические игрушки-автоматоны изготавливались часовщиками вплоть до начала 20 столетия. Их главным недостатком был сильно ограниченное время действия и слабость из-за особенностей пружинного заводного механизма. Однако развитие технологии электричества дало человечеству новый источник энергии, которым можно было питать устройства гораздо более продолжительное время. В то же время начинаются и первые попытки заставить сложные механизмы работать на человека, заменяя его труд на производстве. Уже в 1808 году французский ткач Жозеф Мари Жаккар изобрел ткацкий станок, программируемый с помощью перфокарт. Пока это был еще не робот – скорее, аналог современных автоматизированных линий. Но именно в нем впервые в промышленности был реализован принцип программирования, на котором держится современная робототехника.
Параллельно совершенствовались и способы управления – в частности проводной и радиоволновой. В 1898 году Никола Тесла впервые продемонстрировал самоходную лодку, управляемую дистанционно с помощью радио. Одновременно вместо сложных механических приводов устройства начали обзаводиться более простыми, мощными и миниатюрными электрическими двигателями.
Уже к началу 20 века сформировались все условия, обусловившие создание первых роботов. Электрический ток стал не только источником питания, но и средством получения, передачи и обработки информации. Сложно сказать, когда появился первый робот в современном понимании этого слова. Многие компании и отдельные разработчики тех времен вели работу в области создания подобных машин. В 20-30-е годы прошлого века было разработано более 30 механизмов, соответствующих требованиям полноценной робототехники.
И все же считается, что человек, создавший первого действующего робота – американский инженер Рой Уэнсли из корпорации Westinghouse Electric Company. Разработанный им в 1928 году механизм под названием «Герберт Телевокс» представлял собой человекоподобную машину, способную открывать двери и окна, отключать духовку, электродвигатели и т. д. Важнейшим отличием этого изобретения от автоматонов являлось умение отвечать и реагировать на команды, подаваемые ему по телефону. При этом робот был не подключен к линии напрямую – он, подобно человеку, с помощью встроенного микрофона слушал приказания. Из-за несовершенства технологий того времени эти команды представляли собой не обычную речь, а определенную последовательность гудков, писков, скрежетов и других звуков различной тональности.
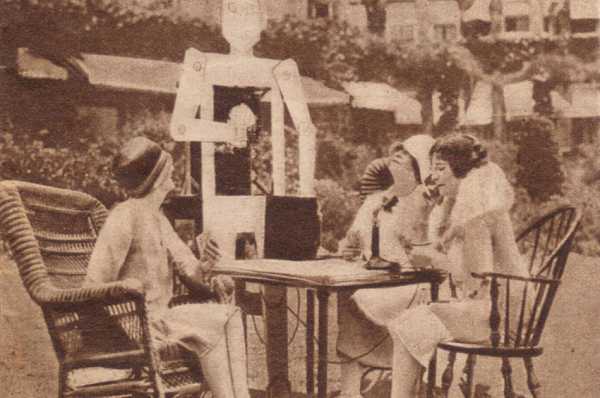
Первенство Роя Уэсли оспаривает Макото Нисимура – японский ученый-биолог, создатель первого действующего робота в Японии (1929 год). Этот управляемый по проводам антропоморфный механизм был способен по командам выполнять различные манипуляции руками, в частности писать. Еще одним претендентом на роль родоначальника роботов был Эрик, разработанный в том же 1928 году британским военным Уильямом Ричардсом. Механизм мог не только двигать конечностями, но и «осмысленно» отвечать на ряд вопросов, при этом даже умудряясь отпускать шутки.
Однако эти и многие другие роботы предназначались для демонстрации научных достижений, но не для практической деятельности. Возникновение робототехники в производстве или сельском хозяйстве произошло позже, потому как такая работа требовала качественно нового уровня технологий. Хотя стоит отметить, что первый прообраз промышленного робота появился еще в 1898 году – это был созданный американским инженером Бэббитом манипулятор, с помощью которого выхватывались заготовки из раскаленной печи.
Полноценное развитие робототехники в промышленности произошло лишь после окончания Второй мировой войны.
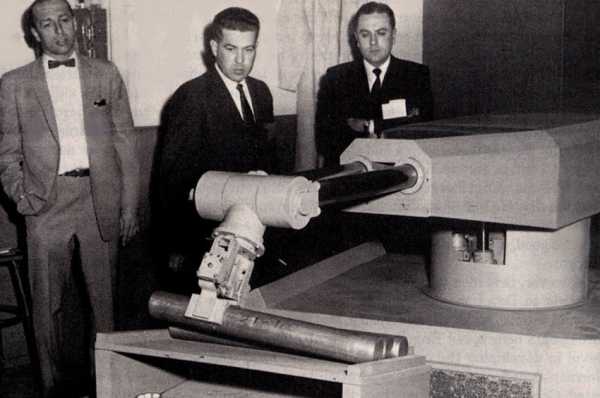
В 1948 году в США компанией General Electric был создан первый промышленный робот для работы на атомном реакторе. Его особенностью было наличие обратной связи – оператор мог не только видеть его перемещение в рабочем пространстве, но и чувствовать силу, которую развивал захват манипулятора, что позволяло управлять механизмом более точно. В середине 50-х годов американец Джордж Девол основал компанию Unimation, которая занималась выпуском первых серийных промышленных роботов, программируемых с помощью перфокарт. Уже к середине 60-х годов в развитых странах насчитывалось несколько десятков компаний, наладивших выпуск подобных машин. Особенно в этом преуспела Япония – закупив у «Юнимейшн» первые роботы в 1968 году, уже через 10 лет эта страна стала мировым лидером по выпуску собственных аналогов и оснащения ими производств.
Сегодня роботы проникли практически во все сферы деятельности. Промышленность, научные исследования, энергетика, медицина, развлечения, военные действия и даже космос – современные автоматические или дистанционно контролируемые механизмы используются очень широко и даже постепенно вытесняют человеческий труд. Развитие роботов идет по нескольким направлениям – улучшение механизмов и приводов, совершенствование алгоритмов, внедрение самообучающихся систем управления (слабого искусственного интеллекта), а также разработка новых интерфейсов «человек-компьютер». Роботизация тесно переплетается с биотехнологиями и кибернетикой, результатом чего является создание кибернетических организмов (киборгов), функциональных бионических протезов, полностью автономных автомобилей, кораблей, космических и летательных аппаратов (в том числе военных). Так наше общество незаметно для себя вошло в будущее, которое всего лишь век назад описал в своей пьесе Карл Чапек.
robo-sapiens.ru