
кто и когда изобрел первый дрон, история развития
Сегодня о квадрокоптерах не знает только ленивый. Эти беспилотные аппараты используются в качестве игрушек, летающих платформ для фото- и видеосъемки, военных разведчиков и даже спортивных снарядов. Первый квадрокоптер на радиоуправлении появился чуть более 10 лет назад, а сегодня такие устройства уже являются привычными гаджетами. Однако ошибочно думать, что это изобретение сугубо 21 века – первые прототипы подобных аппаратов были разработаны еще в начале прошлого столетия. История квадрокоптера полна интересных технических решений, поисков и экспериментов, узнать о которых подробнее мы и предлагаем вам в этой статье.
Первые прототипы квадрокоптеров
Прежде чем углубляться в историю этих аппаратов, необходимо разобраться в их специфике. Под квадрокоптером понимается вертолет, имеющий четыре несущих винта, разнесенных с помощью балок относительно центра корпуса. Каждый из них оснащен собственным двигателем, а работа всех приводов контролируется микропроцессорной системой и тремя гироскопами, обеспечивающими стабильное положение аппарата в воздухе. В зависимости от модели конструкция квадрокоптера может также включать акселерометр, датчик давления, сонар и GPS-приемник. Чтобы исключить поворот аппарата в воздухе, одна половина винтов вращается по часовой стрелке, а вторая – против, тем самым компенсируя крутящий момент. Полет коптера может управляться радиокомандным способом посредством пульта или проходить в автономном режиме по заранее записанному в бортовой компьютер маршруту.

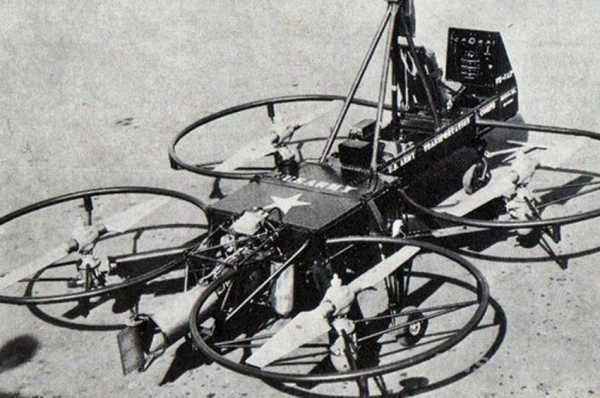
История создания квадрокоптеров началась еще на заре вертолетостроения, а именно в 1920-х годах. Тогда независимо друг от друга над подобной идеей работали американский конструктор российского происхождения Георгий Ботезат и французский инженер Этьен Эмишен – каждый из них придумал пилотируемый аппарат с четырьмя разнесенными винтами, которые приводились в действие одним двигателем через сложную систему трансмиссии. Во время испытаний их вертолеты смогли подняться на небольшую высоту (от 5 до 15 м) и пролететь определенное расстояние (модель Эмишена преодолела 1100 м), однако дальше тестовых полетов дело не пошло. На то имелось 3 причины:
- слишком сложная трансмиссия, передающая крутящий момент с одного двигателя на все роторы, была крайне ненадежной и постоянно выходила из строя;
- для поперечного и курсового управления модель Омишена использовала целых 8 пропеллеров, а аппарат Ботезата мог двигаться только с попутным ветром;
- аппараты не имели системы стабилизации в воздухе, из-за чего были крайне неустойчивым в полете, особенно в ветреную погоду.
Хотя хронологически первым квадрокоптер придумал именно Этьен Эмишен, его аппарат нельзя считать полноценным прототипом современных моделей.

Последующее
Параллельно развивалась технология создания беспилотных летательных аппаратов (БПЛА), управляемых дистанционно или в автономном режиме. Особенно это было востребовано военными, которые заинтересовались подобными машинами еще в Первую Мировую войну. Сложно сказать, кто изобрел первый дрон, так как подобные разработки проводились во всех развитых странах того времени, но одним из самых ранних аппаратов этого типа в мелкосерийное производство поступил немецкий беспилотный бомбардировщик Fliegermaus, способный нести бомбовую нагрузку и управляемый по радио. Другой пример такой техники – созданный в 1917 году «Автоматический аэроплан Хьюитта-Сперри», оснащенный двумя гироскопами для полностью автономного полета по заданному курсу.

Если быть совсем точным, то первые военные беспилотники были изобретены еще раньше – в 1849 году австрийская армия использовала воздушные шары с автоматически сбрасываемыми фугасами для бомбардировки Венеции.
В межвоенный период и

Появление современных квадрокоптеров
По прошествии полувека с тестовых испытаний первых квадрокоптеров сложились благоприятные условия для возрождения интереса к этому виду летающей техники:
- во-первых, достижения в области материаловедения позволили создать прочные и легкие полимеры, которые существенно уменьшают вес аппарата;
- во-вторых, прогресс микроэлектроники (а именно появление микропроцессоров) обеспечило базу для более простого и стабильного управления винтокрылыми машинами.
В своем современном виде первые в мире квадрокоптеры появились в 2006 году с выпуском моделей от немецкой компании MikroKopter. Они уже имели бортовой микроконтроллер, 3 гироскопа, барометр и акселерометр, отличались достаточной стабильностью в полете. Чуть позже их дополнили GPS-модулем для фиксации позиции. Квадрокоптер на радиоуправлении от MikroKopter изначально был предназначен для профессионального использования и имел высокую стоимость, однако открытый исходный код привел к появлению на рынке его дешевых клонов, что негативно отразилось на продажах компании. И хотя по данной причине код впоследствии закрыли, это побудило другие фирмы изобретать дроны гражданского назначения в разных ценовых категориях.

В дальнейшем рынок четырехвинтовых дронов пошел по двум направлениям:
- создание полностью готовых к использованию устройств различного класса, от бюджетных игрушек до профессиональных платформ для видеосъемки, спасательных, полицейских, природоохранных и других операций;
- разработка микроконтроллеров и программного обеспечения к ним, которые можно адаптировать к самодельным или купленным аппаратам.
По первому пути пошли такие ныне известные компании, как Gaui, DJI, XAircraft и другие производители. Как правило, в их продукцию входит сам аппарат, собственная линейка микроконтроллеров и программного обеспечения к ним. Во втором направлении особо отметились такие компании, как MultiWii, KaptainKuk, ArduCopter. При разработке своих микроконтроллеров они часто используют платы Arduino и разрабатывают открытый исходный код, давая возможность энтузиастам самим создавать свои варианты систем.

Благодаря финансовой доступности и простоте этих компонентов сегодня весьма развито любительское моделирование дронов.
Еще одной важной технологией, благодаря которой квадрокоптеры появились на широком рынке, явилась система стабилизированной подвески, позволяющая монтировать на аппарат фото- или видеокамеру или иную аппаратуру. Установленные в ней сервоприводы и датчики позволяют компенсировать колебания и развороты дрона по соответствующим осям, обеспечивая подсоединенному оборудованию оставаться в практически неподвижном положении. Это существенно улучшило качество съемки с квадрокоптеров, и именно благодаря этой технологии они сегодня широко используются в рекламе, кинопроизводстве, военном деле и т. д.
Очевидно, что история дронов не остановится на стадии развлечения и узкоспециализированного применения. В Саудовской Аравии уже готовятся в ближайшие годы запустить автоматическое беспилотное такси на базе квадрокоптера
robo-sapiens.ru
История квадрокоптеров. От Георгия Ботезата до наших дней.
Первый радиоуправляемый квадрокоптер такой, каким мы его знаем, появился в начале двухтысячных. И хотя многие уверены, что это современное изобретение, появившееся буквально в нашем веке, это не так: начальные прототипы этих гаджетов появились уже в начале 20 века. В этой статье мы расскажем о истории появления квадрокоптеров, от первых летающих четырехвинтовых аппаратов до наших дней.
Для начала разберемся в устройстве дронов. Квадрокоптер — это миниатюрный вертолет с четырьмя несущими винтами, разделенных по центру балками. Все винты оснащены индивидуальным двигателем, приводное действие контролирует система микропроцессоров и три гироскопа, дающие сбалансированное положение коптера в воздушном пространстве. Для предотвращения нежелательных наклонов и разворотов аппарата при полете, часть винтов движется в одну сторону, а другая часть – в противоположную. За счет этого компенсируется крутящий момент. Направление и высота полета дрона регулируется радиоуправлением с помощью пульта или проходить в автономном режиме по маршруту, заблаговременно прописанному в бортовом компьютере.
Георгий Ботезат и первый полет.
Один из родоначальников такого вертолета, был аппарат Ботезата, взлетевший в воздух еще в 1922 г. Георгий Александрович Ботезат – американец с корнями из России, он был инженером электромонтажных работ, изобретателем и профессором Петроградского технологического института. В одном из экспериментальных полетов аппарат Ботезата смог поднять в воздух груз весом 450 кг на высоту 4 метра.
Предпосылки появления современных коптеров начались на заре вертолетостроения — в 1920-х г. В те дни над одной и той же идеей думали двое, каждый сам по себе: это были Этьен Эмишен, французский инженер и Ботезат. Удивительно, но они оба почти одновременно сконструировали четырехвинтный вертолет, где все разнесенные винты приводились в движение единым двигателем с помощью трансмиссионной системы. Для обеих моделей проводились испытательные полеты, в результате которых аппараты поднялись в воздух на высоту от 5 до 15 метров и пролетели около 1 километра. Но на этапе тестирования, дело застопорилось. Причиной этому стало:
• выходящая из строя и не особо надежная система трансмиссии, которая передавала крутящий момент с двигателя на роторы
• в аппарате Эмишена использовалось восемь пропеллеров, в то время как модель Ботезата могла двигаться исключительно благодаря попутному ветру.
Обе модели не имели баланса в пространстве при полете, особенно при сильном ветре из-за отсутствия системы воздушной стабилизации. И несмотря на то что по дате изобретения первый квадрокоптер в мире был рук Этьена Эмишена, его модель не считается уверенным прообразом современного коптера.
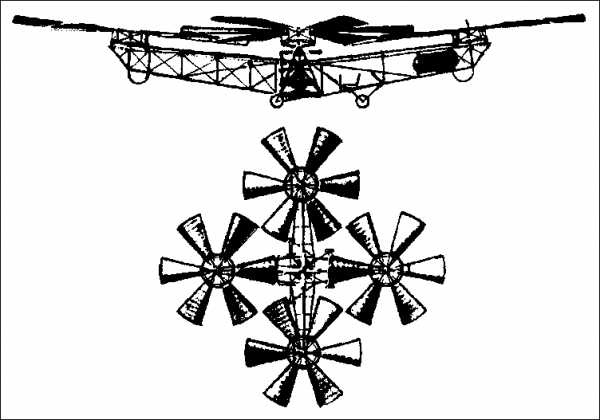
В 1922 г было положено начало испытаниям одного из первых четырехвинтных дронов. Такая система с большим количеством винтов упрощала управление: для того, чтобы повернуть аппарат, нужно было лишь изменить положение носовой его части. И кто бы мог подумать, в конструкции лопастей использовались растяжки… рояльных струн.
Только в 50-ых несколько производителей сконструировали аналогичные квадролеты в качестве опытных образцов. Но наиболее полноценный вариант летательного устройства разработал все же Ботезат, это был квадрокоптер, управляемый несущими винтами.
Летающий «автомобиль» для армии США.
Еще одним удачным изобретением можно считать модель VZ-7, разработанный фирмой Сurtiss-Wright,
В1958 году в ходе испытательных полетов он заявил о себе как стабильно работающий и хорошо управляемый, но американская армия не приняла его к эксплуатации из-за слишком маленького количества функциональных опций.
На данном этапе все работы по конструированию и усовершенствованию квадрокоптеров были заморожены, и решение продолжить развитие этой темы возникло спустя половину века, только в новом тысячелетии.
Спустя пятьдесят лет с момента пробных полетов первых квадролетов, интерес к этой теме возобновился, поскольку появились благоприятные для этого условия:
• появились прочные и легкие полимерные материалы, позволяющие значительно снизить вес аппарата
• развитие микроэлектроники помогло устройству управления аппаратов с винтами стать более удобным и стабильным.
Первые коммерческие дроны для аэросъемки.
В таком виде, какие они есть сейчас коптеры стали выглядеть в 2006 г, это были модели производства Германии компании MikroKopter. Они имели ряд усовершенствований и опций, позволяющих достичь стабильности при полете, фиксации позиции и предназначались для профессионального использования. Радиоуправляемый аппарат фирмы MikroKopter был не дешевым, и благодаря тому, что он имел открытый исходный код, вскоре появилось множество его более дешевых аналогов, которые себе мог себе позволить приобрести, практически каждый.
Усовершенствование системы стабилизированной подвески позволило устанавливать на коптер фото- и видеокамеру, чтобы при этом присоединенное оборудование находилось в строгой фиксации, способствовало тому, что дроны начали массово и повсеместно продаваться.
Помимо этого, такой апгрейд значительно увеличил качественные характеристики аэросъемки с коптеров, и именно благодаря этой технологии они сегодня широко применяются в рекламных съёмках, киносъемках, военных разработках и прочих сферах.
Далее развитие темы дронов с четырьмя винтами имело два пути:
• изготовление полноценных устройств для видеосьемки – от недорогих игрушек до платформ для видеосъемки и других профессиональных сфер. Обычно, в комплекте идет аппарат и собственная линейка микроконтроллеров и программного обеспечения к ним.
• отдельное производство микроконтроллеров и программного обеспечения для них, которые можно адаптировать к самодельным или приобретенным в магазине коптерам, что дает возможность всем любителям моделирования дронов, самостоятельно сконструировать свой вариант системы.
Будущее индустрии.
История создания и развития коптеров не ограничивается развлекательными целями и узкоспециализированным применением. В Саудовской Аравии планируется запуск автоматического беспилотного такси на базе летающего дрона. Разрабатываются модели военных машин, используемых как для разведки, так и в боевых действиях.
Поэтому все только начинается 🙂
Если интересует история появления квадрокоптеров, то можно посмотреть еще пару статей на нашем сайте: про историю аэрофотосъемки в России и про ее более поздний период — внедрение аэрофотосъемки в Советском Союзе.
aero-b2b.ru
Первый квадрокоптер / Habr
Сейчас любой взрослый, ответственный и зарабатывающий деньги мужчина может позволить себе купить квадрокоптер, чтобы с его помощью пугать коллег по работе в офисе или на улице.А первым действующим прототипом такой игрушки (и заодно всех ныне существующих вертолетов) был вертолет Ботезата, поднявшийся в воздух в далеком 1922 году. Более того, в рамках одного из экспериментальных полетов этот аппарат смог поднять на высоту в 4 метра груз весом 450 кг.

Георгий Александрович Ботезат был американцем российского происхождения, изобретателем, профессором Петроградского технологического института. Также он окончил два института, в Харькове и Бельже (Бельгия), был инженером-электриком. Но главное, почему его помнят, это вертолет.
Испытания одного из первых вертолетов, оснащенного четырьмя винтами, начались в 1922 году. Многовинтовая схема позволяла упростить управление аппаратом: поворот осуществлялся изменением положения носовой части вертолета. Каждый винт изменяемого шага состоял из шести лопастей. В конструкции использовались растяжки из струн… от рояля.
Разработка квадрокоптера велась на деньги армии США. Цель — создать летательный аппарат с вертикальными взлетом и посадкой. У Ботезата не было терпения на разработку прототипов, так что он сразу принялся строить полноразмерный аппарат.
Несмотря на потраченные на программу 200 000 долларов, что было большой суммой в первой половине прошлого века, проект был прикрыт из-за некоторых проблем. В частности, чтобы просто лететь вперед, был нужен попутный ветер. Ботезат хотел продолжить работу и исправить эту проблемой, но не успел.
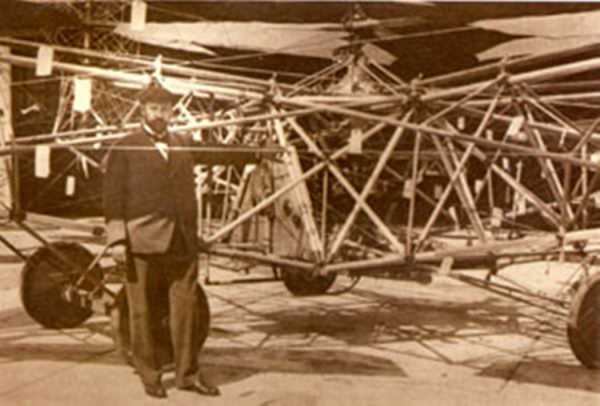
Изобретатель рядом с летательным аппаратом.
Ручка управления, хранится в Смитсоновском музее авиации и космонавтики.

Технические характеристики
Управление: 1 пилот
Грузоподъемность: до четырех пассажиров
Габариты длина/ширина/высота: 20 х 20 х 3 метра
Масса: 1633 кг
Двигатель: 1 роторный двигатель Le Rhone мощностью 180 лошадиных сил
Максимальная скорость: 48 км/ч
Рабочая высота: 5 м
Максимальная высота: 9,1 м
habr.com
История создания современного квадрокоптера: факты и видео
Дроны, дистанционно управляемые вертолеты, шпионские и военные мультикоптеры — все эти летающие устройства уже давно стали частью повседневности. Сегодня электрической бескрылой «леталкой» уже никого не удивишь. Вот оно, держится в небе на своих маленьких вентиляторах, безо всяких крыльев и только за счет электричества! Однако, до недавнего времени машины с вертикальным взлетом и на электрической тяге были всего лишь недостижимой мечтой. Как же это стало возможным и почему никто их не делал раньше? Кто первым смог поднять электровертолет в воздух? Давайте посмотрим историю появления в нашем небе многопропеллерных жужжалок.

Предпосылки к появлению электрического вертикального взлета
Еще пятнадцать лет назад в небе среди компактных летающих устройств можно было наблюдать только самолеты и вертолеты с двигателями внутреннего сгорания. И во всем мире, и в СССР основой авиамоделизма неизменно выступали самолеты. Это были кордовые, неуправляемые и радиоуправляемые модели. Про модели вертолетов ходили только слухи, кто-то хвалился, что смотрел на полет такого, но им не верили, и никто радиоуправляемые вертолеты в глаза толком не видел.
Конкурс радиоуправляемых вертолетов 1982 года в СССР
У моделей самолетов с авиадвигателями, работающими не на топливе, а от электричества, дело обстояло получше, но для вертолетостроения электромоторы на протяжении более ста пятидесяти лет, с самого момента их появления, были абсолютно непригодны. Вертолеты на видео 1982 года тоже имеют ДВС-двигатели.
Однако время не стоит на месте, и постепенно появились две необходимые для подъемной электротяги вещи. Во-первых, появились малогабаритные, а также и бесщеточные, или вентильные, электромоторы.
Дело в том, что до их появления никакие электродвигатели не давали такой мощности, которая была бы достаточной для подъема нужного веса при приемлемой собственной массе. Поэтому электрические моторы можно было применять в автомобилях, трамваях и метро, с их помощью можно было бриться, перемалывать пищу и качать воду. Можно было даже исхитриться и добавить к ним крылья, поставив их на самолет. Однако, первые электродвигатели в самолетах непременно проигрывали по ДВС по всем параметрам. Правда, не все электромоторы нового поколения изначально предназначались для авиации, сейчас мы об этом поговорим.
Рыбак-вертолетчик, 2010 г. Модель с ДВС
А во-вторых, появились компактные и ёмкие аккумуляторы, чему, скорее всего, значительно поспособствовало развитие мобильной электроники. Например, стали производиться литий-полимерные и литий-ионные аккумуляторы, которые пришли на смену на смену никель-кадмиевым и никель-металлогидридным.
Самые первые аккумуляторы не были легкими и компактными, а поднять такой в воздух не представлялось возможным. Поначалу их пытались применять и в автомобилях, но появился двигатель внутреннего сгорания и на тот момент быстро поставил точку в развитии электротромобилей. Современные же литий-полимерные аккумуляторы позволили получить бо́льшую ёмкость на единицу массы.
Первопроходцы
Proxflyer
Первым соединить достижения новых технологий догадался норвежский инженер Peter Muren. Он создал сайт с описанием своего первого изобретения в 2003 году, если Archive.org не врет. Сайт назывался Proxflyer.com (именно с таким написанием, через «Y») и содержал фото и видео полетов невероятного для того времени устройства: вертолета размером всего лишь с пачку сигарет, при этом управлявшегося дистанционно.
Чтобы заставить модель подняться в воздух, Питер применил самую стабильную в полете вертолетную схему — соосную (как у КА-50 Черной Акулы). В своей конструкции он не стал использовать несуществующие в то время мини-автоматы перекоса и, тем более, гироскопы, тем самым облегчив модель.
Peter Muren демонстрирует первую в мире модель электрического вертолета, 2004 год
Приводы от электромоторов были выполнены на шкивах, а в качестве ремней использовалась тонкая резинка типа той, которая использовалась в пассиках для кассетных магнитофонов. Шестерней в данной схеме не было. Один мотор крутил оба винта, другой — поворачивал хвост.
Передача про Proxflyer, 2004 год
Питер смог добиться нужной массы устройства, использовав в своем вертолете новые литий-полимерные аккумуляторы. Для уменьшения веса лопасти и части корпуса вертолета были сделаны из бальзового дерева. В качестве моторов он применил те, которые тогда только что появились и поначалу применялись в виброзвонках пейджеров (кто не знает, что такое пейджер, спросите у своих родителей) и мобильных телефонов. Такие электромоторы так и называли: Pager motor (моторчик из пейджера):
Поэтому первые микромоторы делались совсем не для вертикального взлета.
Позже Питер соорудил другие модели, где смена положения вертолета в пространстве осуществлялось путем изменения скорости вращения одного из двух соосных винтов, а ими управляли отдельные моторы. Всего за подъем их отвечало два.

Движение вперед осуществлялось за счет третьего электромотора, установленного не вертикально, как у классических вертолетов или как у первой модели, а горизонтально и поднимавшего хвост модели кверху.
Инженеру удалось найти такое сочетание миниатюрных и легких моторов с другими снижающими вес деталями, которое, наконец-то, позволило модели воспарить над столом.
Получив патент на свое изобретение, Питер занялся усовершенствованием своих моделей, а чуть позже фирма Interactive Toy Concepts стала производить игрушечные вертолеты по его схеме.
Более новая модель Proxflyer, примерно 2004 год.
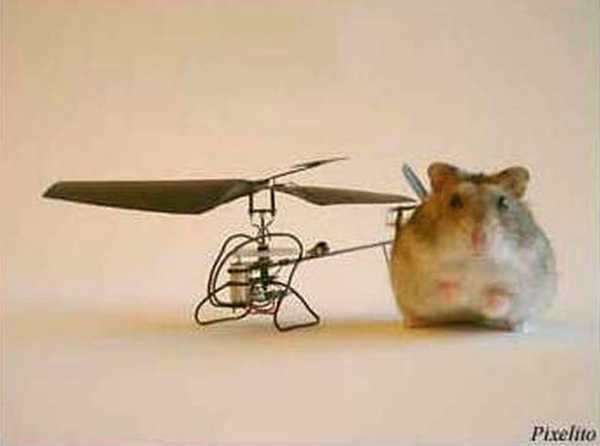
Pixelito
Второй схемой, разрабатываемой параллельно, стала схема с вертикальным влетом моделиста из Бельгии по имени Александр. Он назвал свой вертолет Pixelito. Александр применил в нем схему, отличную от Proxflyer, с одним несущим винтом.

Стабильности ее полёта способствовало специальное устройство на винте: за неимением приемлемых по весу электронных стабилизаторов полета, на винт ставилось массивное навершие, выполнявшее при раскрутке роль гироскопа.
Сверху находится балансир (flybar, Bell/Hiller bar):
Как бы в последствии конструкторы ни пытались, без этой штуки вертолеты с одним винтом летать отказывались. Напомню, что первой вертолетной схеме балансир был не нужен или, может быть, его функцию частично выполняло ограничительное кольцо на лопастях из бальзового дерева.
В этой модели моторчика было тоже два: для основного винта, который позволял лететь вверх-вперед, и для стабилизирующего пропеллера, с помощью которого можно было поворачивать. Модель получилась невероятно маленького размера, о чем можно судить по фото с хомячком, оно 2003 года, так что сорри за качество. Модель весила всего 6,9 грамм.
В 2003 году Александр был уже почти у создания работоспособной модели, и нашел Питера, создателя Proxflyer. Они решили объединить усилия, и таким образом довели свои модели до рабочих прототипов.
В записи от 15 Декабря 2003 года говорится: «Сегодня мы с Питером с удовольствием представляем результат наших последних совместных разработок. Я создал вертолет Pixelito, а Питер — Proxflyer Micron (на тот момент уже не первую модель норвежца — мое примечание). Pixelito — это вертолет с моей собственной системой контроля ротора, а дизайн Питера уже довольно хорошо известен. Мы называем их роботами, потому что такое название характеризует их лучше всего. Примерно 2 недели назад мы с Питером провели чудесные выходные у меня дома и после этого решили, что было бы неплохо вести совместные исследования, каждый у себя дома, но двигаясь к общей цели. Это вылилось в создание модели весом всего 6,9 грамм вместе с аккумулятором, и мы оба знаем, что это не предел.
Александр и Питер.»
Видео только что созданного мини-вертолета Pixelito, но в ролике им управляет друг его создателя, автор Proxflyer Peter Muren. Можно догадаться, что Александр держит камеру.
Pixelito, 2003 год.
Третьим прототипом могла бы стать нашумевшая в то же самое время разработка японской фирмы Seiko Epson. Модель могла летать только вверх и вниз.

К сожалению, после первой же новости об этом соосном летающем чудо-устройстве информация про него исчезла, осталась только статья с описанием: https://www.ixbt.com/news/hard/index.shtml?02/35/48 Судя по всему, разработка не удалась и не получила дальнейшего развития, к тому же, не было ни одного видео с демонстрацией его работы. На фото видно, что в ней была использована схема, в которой соосные винты сочетались с балансиром.
Развитие электрического вертолетостроения
С появлением летающих прототипов идею подхватили и другие производители игрушек, и, используя новые двигатели, аккумуляторы и подобрав более современный и легкий пластик, стали производить модели вертолетов одну за другой, сначала по норвежской схеме, ну а потом и по подобию Pixelito, по-моему, первые серийные модели так и назывались — Pixelito.
Вертолет одной из первых моделей по схеме, аналогичной Proxflyer, фирма Syma, 2007 год
Также одна из первых моделей английской фирмы Fastek Computers, 2007 год
Поначалу вертолеты были, в основном, соосные. Одним из самых плодовитых на тот момент производителей игрушечных радиоуправляемых вертолетов была китайская компания Syma. Авиамоделисты из всех стран также вовсю пробовали разные варианты построек моделей с вертикальным взлетом, и некоторые их достижения были довольно-таки выдающимися, но то, что быстрее всего дошло до конечного потребителя — это продукция фирм-производителей игрушек.
Одна из первых моделей по схеме Pixelito, 2-канальная, лишь с балансиром, 2008 год
В результате как норвежский, так и бельгийский моделисты неплохо заработали на продаже прав на производство вертолетов на дистанционном управлении, сделанных по их схемам. В последствии разработками Питера заинтересовались DARPA и норвежское Министерство Обороны, инженер создал свою фирму Prox Dynamics и стал разрабатывать вертолет-шпион для военных целей.
Что сейчас там происходит и на какой стадии находится производство, неизвестно.
Улучшения и повышение стабилизации полета
В то время как первые игрушечные вертолеты имели всего 2 канала управления (вперед-вверх и поворот лишь в одну сторону), любители для себя делали и модели на многоканальном радиоуправлении. Чтобы управлять самыми первыми моделями дистанционно управляемых вертолетов, требовалась довольно долгая тренировка, поскольку ровно удержать его в воздухе было довольно трудно, и многое зависело от мастерства пилота.
Для самых простых игрушечных вертолетов вместо радиоуправления применялось управление по инфракрасному излучению. В более продвинутых моделях — по радиоканалу. В дешевых моделях оно было двухканальным, чем дороже — тем каналов управления становилось больше.
В самых дешевых моделях на смену двухканальному управлению добавили третий, и управление стало больше походить на полноценный полет. Вот только держаться в воздухе, несмотря на множество каналов, было все еще непросто.
Обратите внимание, как трудно пилоту совладать с удержанием модели на месте:
Одна из первых моделей вертолетов, 2007 год.
Появление миниатюрных гироскопов значительно улучшило эту ситуацию. После добавления в модель этого устройства полет становился прямо непривычно стабилен, не надо было постоянно держать пальцы на клавишах управления. Однако такие модели стоили гораздо дороже, чем вертолеты без гироскопа.
Видео про модели вертолетов с гироскопами, 2011 год
Самой популярной из моделей с гироскопом для массового покупателя была модель Syma S107, ну а самыми надежными, выдерживавшими прямые столкновения со стенами, зубы котов и бесконечные тараны мебели, наверное, являлись вертолетики фирмы Himoto. Гироскопы стали применяться и в моделях вертолетов с ДВС:
На видео трюки выполняет вертолет с гироскопом и ДВС, 2014 год.
В военной области первой испытания выстрелов с радиоуправляемого вертолета стала проводить некая фирма Neural Robotics в 2006 году. Они подвесили дробовик на модель вертолета и стали исследовать поведение модели при выстрелах, а также как стрельба отражается на управлении.
Выстрел из дробовика, 2006 год
Их вертолет обладал ДВС, и этот опыт стал знаковым — он подтолкнул развитие направления ударных дронов. Сейчас военные мультикоптеры во всю сбрасывают бомбы, шпионят и наводят ракеты на цели.
Если сомневаешься — ставь больше пропеллеров!
Почти сразу после появления моделей вертолетов появились попытки создания многопропеллерных, если можно так выразиться, машин.

Чем больше пропеллеров было в модели, тем труднее было согласовывать их работу. Тот же вертолет Chinook с картинки выше, без гироскопа колбасило при полете так, что становилось сомнительным применение двух пар винтов. Для полета же моделей с тремя и более количеством двигателей требовалась электроника, на порядок сложнее вертолетной.
Поначалу стали экспериментировать с количеством электромоторов. Это сейчас почти всегда ставится знак равенства между дроном и квадрокоптером, но на заре их появления было совсем не так.
Изначально многомоторные модели собирали исключительно энтузиасты. Почти сразу же возникла идея ставить на модели компактные камеры, которых в то время было не много, а GoPro появилась уже позже, и удачно вписалась в тренд. Камеры собирали из собственноручно припаянных контроллеров к камерам от мобильных телефонов и так далее. Конструкторы мультикоптеров подбирали материалы для их рам, экспериментировали с разными электродвигателями, стали собирать различные модули для согласованного управления пропеллерами и гироскопы, писать для этого ПО и обмениваться удачными находками друг с другом. Получалось с переменным успехом.
Пока не было надежной электроники для согласования моторов, смотреть на полеты таких устройств жутковато. Здесь были и поломанные рамы, и потерянные видеокамеры, и утонувшие в водоемах дорогостоящие электронные модули. Однако год от года стабильность, дальность полета, простота управления и качество снимаемых видео постоянно возрастали. Появились коптеры с тремя, четырьмя, пятью, шестью, восемью и более пропеллерами — соответственно, трикоптеры, квадрокоптеры, пента-, гекса- и октакоптеры.
Один из первых трикоптеров, 2010 год
И вот, после долгих экспериментов, модели стали уже летать стабильно. Можно было не бояться, что она завалится на бок при полете или что вибрация при полете будет мешать управлению. Поначалу все ставили себе столько пропеллеров, сколько хотели, но позже каждой схеме, все же, нашлось свое применение.
Пролет квадрокоптера с камерой GoPro Hero 3 на борту через фейерверк, лучше смотреть в HD, 2014 год
Машины с тремя и четырьмя моторами стали чаще применяться для развлекательных полетов, для съемки видео, а увеличенное число пропеллеров пригодилось в коптерах для перевозки грузов, а также в тех случаях, когда от мультикоптера требуется надежность. Ведь если при отказе одного из моторов в модели вертолета неизбежно происходит его крушение, то в случае моделей с несколькими двигателями нагрузку вышедшего из строя мотора можно распределить на другие и удержать машину в воздухе. Долго не утихали споры между приверженцами трикоптеров и квадрокоптеров по поводу баланса между простотой и стабильностью полета.
Октакоптер, специально предназначенный для перевозки грузов, 2012 год
Дальнейшее развитие и перспективы
Благодаря совершенствованию бортовой электроники и использованию модулей GPS, модели научились удерживать свое положение в пространстве и постоянную высоту. На мультикоптеры стали ставить телеуправление, которое по-английски называется FPV — First Person View, вид от первого лица. С его помощью можно управлять дроном, гладя на мир через камеру, установленную на нем. В Сети почти все видео сейчас снимаются с таких дронов. Проводятся гонки на мультикоптерах, чему способствует система управления с видом от первого лица.
Гонки на дронах с управлением с FPV, 2015 год
Позже одна компания при каком-то технологическом институте стала разрабатывать систему автоматисеского контроля роя мультикоптеров и добилась впечатляющих результатов: они не только смогли заставить тучи дронов летать по заданным траекториям, не сталкиваясь. Добавив к ним иллюминацию и используя отдельный мультикоптер в качестве пикселя, составлять объемные изображения и надписи. Свое изобретение они впервые применили в рекламе фирмы Intel.
Голограмма из дронов, 2015 год
Уже в 2011 году построили прототип мультикоптера, способного поднять над землей человека. Сейчас это направление активно развивается. Ведь для перевозки людей здесь есть преимущества перед вертолетами. Это и удобство управления, и более компактные размеры, и электричество в качестве топлива, и безопасность из-за наличия нескольких пропеллеров вместо одного-двух.
Первый мультикоптер с человеком на борту, 2011 год
Устройство дронов продолжает совершенствоваться, для них появляется все больше сфер применения. Мультикоптеры совершенствуют многие авиапроизводители, включая Boeing. Да что там Boeing — сама Почта России уже во всю экспериментирует с доставкой грузов по воздуху. Полет на квадрокоптере с видом от первого лица, от которого захватывает дух, 2017 год.
Возможно, скоро нас ждут аэротакси, огромные пространственные трехмерные скульптуры из дронов на любом большом празднике, доставка посылок и корреспонденции вне зависимости от того, где вы находитесь, а пиццы — всего лишь за три минуты!
Источник: https://habr.com/
russiandrone.ru
с 2006 года до сегодня
Дроны активно используются в различных сферах: журналистика, медицина, охрана, кино и множество других. Квадрокоптеры летают со скоростью от 18 до 68 и более метров в секунду, могут преодолевать расстояния от 2000 до 10 000 и более м. Управление приспособлениями осуществляется с помощью гаджетов по Wi-Fi или даже жестами.
История квадрокоптеров началась давно, еще в 1920 году, когда у француза Этьена Эмишена только зародилась подобная идея. А в 1922 году она даже воплотилась в жизнь в виде конструкции с 4 моторами. Современные, в привычном образе, девайсы появились уже в этом веке, в 2006 году. Отличия современных моделей от прототипов – в разнообразии функций, однако при этом общая конструкция все еще напоминает первые разработки. Что же это такое и какие бывают дроны?
Интересно узнать: 16 уникальных способов применения квадрокоптеров
БПЛА – что это?
Прежде, чем приступить к историческим аспектам, стоит выяснить, что же такое БПЛА? Аббревиатура расшифровывается как беспилотный летательный аппарат (распространенное сокращение – беспилотник). Представляет собой устройство, которая поднимается в воздух с помощью пропеллеров и управляется дистанционно. Для этого используется ПК, пульт управления, смартфон. Современные дроны, например, DJI MAVIC PRO, поддерживают даже режим управления жестами.
Эти аппараты очень маневренны и в зависимости от задач, для которых они разработаны, имеют различные размеры (чаще всего небольшие). Они могут работать как на открытом воздухе, так и в труднодоступных местах: тоннели, трубы. Устройства без проблем поднимаются на большую высоту, функционируют в местах с аномально низкими или высокими температурами. Это отличные помощники для военных целей, а также для инженеров, спасателей, фотографов, путешественников.
MikroKopter и первый квадрокоптер
MikroKopter – известная компания из Германии, которая прославилась в сфере создания беспилотников на радиоуправлении. 2006 год – дата, когда в этой компании изобрели квадрокоптер в известной нам версии.
Первый аппарат имел следующие характеристики:
- чипсет Atmega644 и 4 Кб памяти;
- частота процессора 20 МГц;
- точность барометра – около 1 метра.
Девайс был оборудован 3 гироскопами, барометром и акселерометром. Чуть позже к нему добавили модуль GPS. Первый мультикоптер от немецкой компании стал основой всех подобных приборов для профи и любителей (например, DJI Mavic Air Onyx Black).
Бренд по сей день занимается разработкой и реализацией беспилотников. Они выпускают квадро-, гекса-, октокоптеры. Назначение – исключительно профессиональное использование: это отражается на стоимости аппаратов.
Такие устройства летают от 18 до 45 минут. Их можно поднять на максимальную высоту в 5 км. Среди изобретений от MikroKopter есть и компактные приборы, и девайсы размером XXL. В последних разработках встречаются агрегаты высотой с человека. Большие приборы используются для транспортировки грузов, выполнения научных задач, исследований.
Читайте также: ТОП-3 лучших производителей дронов – рейтинг производителей квадрокоптеров
KaptainKuk
Компания не выпускает уже готовые летательные аппараты, она специализируется на разработке специализированных микроконтроллеров для дронов, ПО к ним. KaptainKuk выпускает платы с 2010 года и в настоящее время продолжает свою работу.
Контроллеры этого семейства стали одними из первых для летающих дронов. Они первые обрели приемлемый формфактор (по размеру). Ранее и до сих пор реализуются по весьма доступной стоимости. Кроме того, компания разрабатывает открытый исходный код, чтобы все желающие могли самостоятельно создавать собственные варианты систем.
Контроллеры KK можно адаптировать к купленным или самодельным аппаратам, правда, многого от таких устройств ждать не приходится. Однако благодаря этим контроллерам развивается любительское моделирование дронов.
Система MultiWii
Следующая веха в истории дронов – появление MultiWii. В самом начале существования этих контроллеров у них была огромная проблема с датчиками. Их либо попросту не было, либо стоили они баснословно дорого. Поэтому первым датчиком для MultiWii стал WMP от игрового манипулятора Nintendo Wii. Отсюда и пошло название контроллера.
«Мозг» этого приспособления (как и в КК) – довольно простенькая плата Arduino. Изначально дронами с такими микроконтроллерами были сложно управлять, выравнивать их параллельно земле. Но проект развивался и дополнялся новыми датчиками. С каждым релизом их количество становится все больше, а значит и коптеры с контроллером MultiWii могут многое. Теперь проект поддерживает большое количество датчиков для оснащения дронов различными опциями: барометр, GPS, сонар и прочее (фунции почти как здесь: DJI Mavic Air Arctic).
Читайте также: Как выбрать цифровую камеру для качественной видеосъемки?
Система ArduCopter
От любителей в истории коптеров к профессионалам. Еще один проект на Arduino, однако в этих контроллерах для дронов достаточно возможностей, чтобы не уступать профессиональным приборам.
Эта система продвинулась дальше предыдущих и продолжает эволюционировать вместе с коптерами.
В частности, коптеры с ArduCopter умеют:
- стабильно удерживать высоту;
- автоматически возвращаться на старт;
- лететь к заданной в GPS точке.
Кроме того, данная система позволяет уже в полете сменить режим или выбрать другой путь, используя для этого программу на ноуте. Стало возможным задать дрону определенную миссию, после выполнения которой он вернется домой.
Ознакомьтесь также: ТОП-5 квадрокоптеров (дронов) DJI
Бесколлекторные подвесы
Параллельно с дронами развивалась еще одна полезная технология – бесколлекторные подвесы. Для начала – что подтолкнуло к ее развитию? Фото- и видеосъемка с управляемых летающих приборов все больше набирала обороты. Проблема в том, что из-за вибраций по время полета кадры получались нечеткими и для решения этой задачи были созданы бесколлекторные подвесы.
Представляют собой отдельную плату с датчиками, которые удерживают камеру в нужном месте и положении. Это достигается благодаря 2 моторам, компенсации разворотов по соответствующим осям. При умелой комбинации дрона (например, DJI Spark Lava Red Combo) и подвеса для камеры получается отличное видео и снимки без «смазывания» кадров.
Может пригодиться: ТОП-10 лучших бюджетных фотокамер: рейтинг 2018 года
Будущее квадрокоптеров
С момента, когда появились квадрокоптеры, сфера их применения расширилась в десятки раз. В будущем планируется приобщить устройства для:
- Доставки посылок – своеобразные воздушные курьеры;
- Поиска людей – чтобы найти заблудившихся, достаточно будет нескольких дронов;
- Поиск злоумышленников – беспилотников учат распознавать лица;
- Раздача интернета – дроны на солнечных батареях проведут интернет на сложные участки.
Это только небольшой перечень сфер, где планируется внедрить возможности коптеров. Совершенствование агрегатов идет по пути увеличения длительности их работы (например, этот девайс летает до 30 минут), расширения функций и оборудования системами искусственного интеллекта.
За 12 лет дроны существенно эволюционировали: от простого полета до выполнения поставленных миссий. В зависимости от встроенного контроллера дроны научились выполнять большее или меньшее количество функций. Например:
|
Программный контроллер |
Стабилизация полета | Удержание высоты | Полет по точкам | Модем/ |
| телеметрия | ||||
| KaptainKuk | + | + | — | — |
| MultiWii | + | + | + | + |
| ArduCopter | + | + | + | + |
Дроны помогают человечеству, и им находят все новые сферы применения. Уже сейчас их более 20, включая необычные: восстановление экологии с помощью RoboBee или участие в кукольном шоу. Потенциальные и пока неизведанные возможности развития мультикоптеров – бесконечны.
www.moyo.ua
История появления и развития квадрокоптера
Какой современный человек не слышал о «квадрокоптере»? Он представляет собой разновидность вертолета, у которого несущими являются четыре винта, вращающихся в противоположных направлениях.
Однако, не многие знают, что впервые вертолет с четырьмя винтами был изобретен в 1922 году в Дейтоне, штат Огайо, США. Конструктором и первым пилотом стал Георгий Александрович Ботезат, американский ученый, родившийся в Санкт-Петербурге, а позднее приглашенный на работу в США. На разработку революционного, на то время, летательного аппарата для нужд военно-воздушных сил ему было выделено двести тысяч долларов. 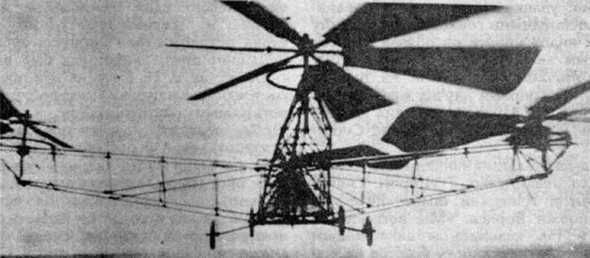 Так, первый в мире вертолет, имевший четыре несущих винта, был поднят в воздух, и с 1922 по 1923 год совершил около ста полетов. Он имел алюминиевую раму и весил одну тысячу шестьсот килограмм, мощность составляла сто семьдесят лошадиных сил, а грузоподъемность до четырехсот пятидесяти килограмм. При этом максимальная скорость могла достигать пятидесяти километров в час, а рабочая высота полета — пять метров при максимальной высоте в десять. Он был первым в рядах военно-воздушных сил США вертолетом, на котором осуществлен управляемый полет, однако серийного производства так и не начали. Вероятно, это объясняется тем, что идея опередила свое время. В то время квадрокоптеры оснащались одним мотором, что требовало наличия особой трансмиссии и являлось нецелесообразным при серийном выпуске.
Так, первый в мире вертолет, имевший четыре несущих винта, был поднят в воздух, и с 1922 по 1923 год совершил около ста полетов. Он имел алюминиевую раму и весил одну тысячу шестьсот килограмм, мощность составляла сто семьдесят лошадиных сил, а грузоподъемность до четырехсот пятидесяти килограмм. При этом максимальная скорость могла достигать пятидесяти километров в час, а рабочая высота полета — пять метров при максимальной высоте в десять. Он был первым в рядах военно-воздушных сил США вертолетом, на котором осуществлен управляемый полет, однако серийного производства так и не начали. Вероятно, это объясняется тем, что идея опередила свое время. В то время квадрокоптеры оснащались одним мотором, что требовало наличия особой трансмиссии и являлось нецелесообразным при серийном выпуске.
В последующие годы, неоднократно предпринимались попытки вернуться к этим летательным аппаратам, но они не пошли дальше создания прототипов. Несмотря на все это, уже в то время квадрокоптеры рассматривались в качестве беспилотных летательных аппаратов. Позднее, квадрокоптеры получили свою долю внимания и популярность в среде авиамоделирования по причине невысокой сложности в постройке и оснащении легкодоступными сборочными узлами. С появлением усовершенствованных контроллеров, процесс управления такими беспилотными летательными аппаратами, также значительно упростился. Появились аппараты, у которых было больше четырех несущих винтов — мультикоптеры. Такие машины имеют больше возможностей при полете, например совершить мягкую посадку при отказе одного двигателя.
Позднее, квадрокоптеры получили свою долю внимания и популярность в среде авиамоделирования по причине невысокой сложности в постройке и оснащении легкодоступными сборочными узлами. С появлением усовершенствованных контроллеров, процесс управления такими беспилотными летательными аппаратами, также значительно упростился. Появились аппараты, у которых было больше четырех несущих винтов — мультикоптеры. Такие машины имеют больше возможностей при полете, например совершить мягкую посадку при отказе одного двигателя.
В дальнейшем, при совершенствовании технологий, эти беспилотники, стали широко использоваться. Сегодня квадрокоптеры имеют небольшой вес, порядка нескольких килограммов, и могут летать на расстоянии 2-3 километров. Оснастив их специальной камерой, можно провести фото и видеосъемку трудно доступных объектов, вести наблюдение за правопорядком и просто весело проводить время, ведь игрушкой могут научиться пользоваться, даже дети из-за легкости в управлении.
Оснастив их специальной камерой, можно провести фото и видеосъемку трудно доступных объектов, вести наблюдение за правопорядком и просто весело проводить время, ведь игрушкой могут научиться пользоваться, даже дети из-за легкости в управлении.
clubhistory.ru
Краткая история квадрокоптеров
Квадрокоптеры или вертолеты с четырьмя роторами, управляются воздушными потоками четырёх пропеллеров. Первый пилотируемый квадрокоптер был создан в начале 1920-х годов. Он был спроектирован как альтернатива вертолету, упоминания о котором прослеживаются ещё со времён древнего Китая.
Но целый ряд проблем с производительностью, ограниченным контролем и низкой стабильностью, привели к прекращению дальнейшего развития.
В наше время квадрокоптерам был дан второй шанс, проявить себя, они получили возрождение в виде БПЛА (беспилотных летательных аппаратов).
Что такое БПЛА?
БПЛА или беспилотник, это машина, которая может быть поднята в воздух и управляема дистанционно с помощью компьютера или пульта управления. Как следует из названия, он является беспилотным, подразумевая, что не имеет на борту пилота, штурмана, или инженера.
На сегодняшний день, БПЛА могут иметь миниатюрные габариты, легкие и маневренные, они способны выполнять небезопасные для человека задания. Некоторые из них предназначены для работы в закрытых помещениях, например — тоннели, канализационные трубы и т.д.
Каковы преимущества использования квадрокоптеров в качестве БПЛА?
Они имеют высокую ремонтопригодность, в отличие от традиционных вертолетов, есть только одна движущаяся часть — ротор. Остальная часть машины является статическим элементом. Таким образом, квадрокоптер имеет гораздо более упрощенный дизайн, чем подобные летательные аппараты. Большинство малых квадрокоптеров используют корпус, имеющий защиту роторов и лопастей. В случае контакта с препятствиями, что делает их более прочным по сравнению с другими БПЛА. Квадрокоптеры используют более короткие лопасти, чем у вертолета. Несущие винты работают на низких скоростях, вызывая меньший коэффициент трения. Это позволяет признать, что квадрокоптер является более безопасным, для использования в сложных полётных ситуациях, чем другие летательные аппараты.
Как работает квадрокоптер?
Квадрокоптер использует четыре лопасти для создания подъёмной силы. Путем изменения скоростных характеристик каждого в отдельности воздушного винта, производится управление маневренностью аппарата в воздухе. Пропеллеры расположены в конфигурации из двух пар, одна пара вращается по часовой стрелке, в то время как вращение другой происходит против часовой стрелки.
Для того, чтобы осуществлять движение вперед, фронтальные винты замедляются, в результате чего нос квадракоптера опускается вниз. Изменённый угол воздушного потока толкает БПЛА вперед. Аналогичное замедление скорости задних винтов, приведет движение воздушного корабля в обратном направлении.
Маневрируя скоростями лопастей вращающихся по часовой стрелки и реверсных винтов можно вызывать разворот квадрокоптера.
Для подъёмной вертикальной тяги, все четыре пропеллера должны работать с одинаковой скоростью.
Как используется квадрокоптеры?
Традиционно БПЛА использовались военными для разведывательной деятельности и обеспечения топографической рекогносцировки.
Поскольку технологии продвигаются вперёд и они стали более доступными, БПЛА в настоящее время широко используются в «гражданских» операциях. Пожарные используют беспилотники в тушении пожаров, нефтяные разведчики для сканирования участков земли в поисках нефти. Полиция также начала использовать беспилотные летательные аппараты для проведения визуального наблюдения.
Благодаря простоте конструкции появились доступные по цене БПЛА для массового использования. Теперь это приобретает масштабы популярного хобби, игрушки и даже заработка среди обывателей. Недорогие беспилотники со встроенными видеокамерами и различным дополнительным обвесом весьма востребованы на рынке. Управление квадрокоптерами стало доступно смартфон приложениями, которые позволяют БПЛА пилотироваться с помощью устройства на основе ОС IOS или Android.
Будущее квадрокоптеров
Как показывают исследования, технологическое развитие позволит уменьшать габариты, увеличит маневренность и приведёт к удешевлению производства. Потенциальные возможности использования беспилотных летательных аппаратов бесконечны.
Будущее выглядит ярким для квадрокоптеров. У них есть потенциал, чтобы значительно изменить жизнь человека к лучшему.
Купить отличные квадрокоптеры вы можете в нашем магазине — бесплатная доставка по России и СНГ, хорошие цены!
kvadrokopters.com