
Ракетостроение — это… Что такое Ракетостроение?
Космический аппарат (КА) — техническое устройство, используемое для выполнения разнообразных задач в космическом пространстве, а также проведения исследовательских и иного рода работ на поверхности различных небесных тел. Средствами доставки космических аппаратов на орбиту служат ракеты-носители или самолёты.
Космические аппараты, одной из основных задач которых является транспортировка людей или оборудования в верхней части земной атмосферы — так называемом, ближнем космосе, также называют «Космическими летательными аппаратами» (КЛА).
Области использования космических аппаратов обуславливают их разделение по следующим группам:
- суборбитальные КА;
- околоземные орбитальные КА, движущиеся по геоцентрическим орбитам искусственных спутников Земли;
- межпланетные (экспедиционные) КА;
- напланетные КА.
Также принято различать автоматические и пилотируемые космические аппараты. К пилотируемым космическим аппаратам, в частности относят все виды пилотируемых космических кораблей и орбитальных космических станций. (Несмотря на то, что современные орбитальные станции совершают свой полёт в области ближнего космоса, и формально могут называться «
Название «Космический летательный аппарат» иногда также используется для обозначения активных (то есть маневрирующих) искусственных спутников Земли, с целью подчёркивания их отличий от пассивных спутников. В большинстве же случаев значения терминов «Космический летательный аппарат» и «Космический аппарат» синономиничны и взаимозаменяемы.
В активно исследуемых в последнее время проектах создания гиперзвуковых летательных аппаратов часто используют ещё одно похожее название «Воздушно-космические аппараты» (ВКА), обозначая, таким образом, средства предназначенные для выполнения управляемого полёта, как в безвоздушном космическом пространстве, так и в плотной атмосфере Земли.
В 2005 году состоялось 55 запусков космических аппаратов (самих аппаратов было больше, так как за один запуск может выводится несколько аппаратов). На долю России пришлось 26 запусков. Число коммерческих запусков составило 18.
Классификация космических аппаратов
Различают следующие классы космических аппаратов:
Космические аппараты предназначены для выполнения широчайшего спектра научных, народно-хозяйственных, военных и другого рода задач, часть из которых перечислена в следующем списке:
- Исследование Земли: — спутники дистанционного зондирования Земли;
- Метеорология: — метеорологические спутники;
- Навигация: — навигационные спутники;
- Планетные и межпланетные исследования — автоматические межпланетные станции, планетоходы;
- Телекоммуникации и связь: — телекоммуникационные спутники;
- Обеспечение жизнедеятельности человека в космическом пространстве — пилотируемые космические корабли и орбитальные станции;
- Космический туризм — пилотируемые космические корабли и орбитальные станции;
- Разведка и военные эксперименты — разведывательные спутники, военные спутники, пилотируемые космические корабли и орбитальные станции;
В силу специфики выполняемых задач космические аппараты могут оснащаться различными двигательными установками на основе ракетных двигателей, к которым относятся как традиционные реактивные двигатели, так и перспективные (солнечный парус, использующий давление солнечного света и так называемый «солнечный ветер»;ионные, ядерные, термоядерные, и т. п.).
Массовые характеристики космических аппаратов
| КА | Масса |
|---|---|
| фемто— | до 100 г |
| пико— | до 1 кг |
| нано— | 1—10 кг |
| микро— | 10—100 кг |
| мини— | 100—500 кг |
| малые | 500—1000 кг |
| большие | более 1000 кг |
Особенности полёта
В общем случае, в полёте космического аппарата выделяются участок выведения, участок орбитального полёта и участок посадки. На участке выведения космический аппарат должен приобрести необходимую космическую скорость в заданном направлении. Орбитальный участок характеризуется инерциальным движением аппарата в соответствии с законами небесной механики. Посадочный участок призван погасить скорость возвращающегося аппарата до допустимой посадочной скорости.
Бортовые системы
Необходимость длительного функционирования в условиях космического пространства и выполнения целевых задач обусловили развитие следующих основных систем космических аппаратов: системы энергообеспечения, системы терморегуляции, системы радиационной защиты, системы космической связи, системы управления движением и т. п. Для пилотируемых космических аппаратов характерно также наличие развитой системы жизнеобеспечения.
Отдельный комплекс проблем возникает при возвращении космических аппаратов на Землю или выполнении посадки на поверхность других небесных тел. В частности, это обуславливает разработку сложных систем обеспечения спуска и посадки.
Ещё один класс задач, часто решаемых разработчиками космических аппаратов, это обеспечение их стыковки с другими искусственными объектами. Выполнение этих задач предполагает наличие систем сближения и стыковки.
Космические корабли в фантастике
Освоение космического пространства является одним из главных сюжетов научной фантастики. Аппараты для перемещения внутри звёздной системы, в частности между планетами, называются у некоторых авторов планетолётами. Как правило, принципом их действия является (как и у современных КА) реактивная тяга. Иногда такие корабли называются просто ракетами.
Для перемещений на межзвёздные расстояния служат звездолёты. Современная технология не позволяет создавать аппараты для межзвёздных перемещений, обладающие приемлемой скоростью.
См. также
Ссылки
Wikimedia Foundation. 2010.
dic.academic.ru
Есть ли перспективы в развитии ранцевых летательных аппаратов? — Одиннадцатая олимпиада (2013/14 уч.год) — Архив работ — Каталог статей
История создания
История создания и развития ранцевых ЛА не менее интересна, чем пляжный аттракцион.
Химмельштурмер («небесный бунтарь») был результатом экспериментов Гитлеровской Германии в последние дни войны. Это устройство использовало две маломощные ракеты, которые закреплялись на груди и спине пилота, позволяя ему, по крайней мере в теории, пролетать 55 метров. Оно предназначалось для инженерных войск Вермахта.

Химмельшурмер
После окончания Второй Мировой Войны немецкие ракетные технологии вместе со знаменитым конструктором Вернером фон Брауном попали в США. Один из работавших с Брауном американских инженеров, Томас Мур, придумал индивидуальный летательный аппарат, который он назвал «реактивным жилетом», жилет работал на перекиси водорода. Заинтересовавшись проектом, военные начали его финансирование. «Реактивный жилет» был изготовлен и на стендовых испытаниях сумел на несколько секунд приподнять пилота над землёй, но его управление было крайне неудобным. «Реактивный жилет» Томаса Мура так и не смог совершить самостоятельный полет, армия прекратила финансирование, и работы были свёрнуты. Это был первый шаг к созданию ранца на реактивной тяге.
Желание получить финансирование и заработать на своем проекте привело инженеров Гарри Бурдетта и Александра Бора к изобретению прыжкового пояса, которому они дали название «Кузнечик». Тяга создавалась сжатым азотом высокого давления. На спине пилота были закреплены баллоны, а к «поясу» были прикреплены два небольших сопла, направленных вертикально вниз. Затем Бурдетт и Бор опробовали и перекись водорода. «Прыжковый пояс» был продемонстрирован военным в действии, но в финансировании проекта было отказано т.к. он был лишь подобием летательного аппарата, и дальше пробных экспериментов дело снова не пошло.
Тем не менее, американские военные не утратили интереса к переносному летательному аппарату. Управление транспортных исследований армии США предполагало, что персональные реактивные аппараты могут найти самое разнообразное применение: для разведки, форсирования рек, высадки морских десантов, подъёма на крутые горные склоны, преодоления минных полей, тактического маневрирования и так далее. Концепция получила название «Малое ракетное подъёмное устройство» (Small Rocket Lift Device, SRLD).
В рамках этой концепции управление в 1959 году заключило контракт с компанией «Аэроджет» на исследовательские работы по возможности создания SRLD, пригодного для армейских целей. «Аэроджет» пришла к выводу, что наиболее подходящим является вариант с двигателем на перекиси водорода. Однако вскоре военным стало известно, что инженер Венделл Мур(однофамилец Томаса Мура) из компании «Белл Аэросистемс» уже несколько лет проводит эксперименты по созданию персонального реактивного устройства. Ознакомившись с его работами, военные в августе 1960 года решили передать заказ на разработку SLRD компании «Белл». Венделл Мур был назначен ведущим инженером проекта.
Типы ранцевых ЛА
Ранцы Венделла Мура
Венделл Мур начал работать над созданием реактивного ранца ещё в 1953 году. Эксперименты начались в середине 1950-х годов. Создание двигателя не представляло трудностей — применение перекиси водорода было хорошо отработано ракетчиками. Проблема состояла в достижении стабильного и устойчивого полёта, а для этого требовалось разработать надёжную и удобную систему управления ранцем в воздухе.
Была изготовлена экспериментальная «сборка», работавшая на сжатом азоте. Она имела раму из стальных труб, в которой был «подвешен» испытатель. На раме шарнирно устанавливались два сопла. К соплам гибким шлангом был подведён азот давлением 35 атмосфер он подавался из цистерны). Инженер-оператор на земле регулировал вентилем подачу азота, а испытатель подплечными рычагами наклонял сопла вперёд-назад, пытаясь добиться стабильного зависания на небольшой высоте. Вся конструкция была застрахована тросом. Первые же испытания показали, что человек является весьма неустойчивым летающим объектом. Опытным путём было определено наилучшее расположение реактивных сопел относительно центра тяжести, их направление, способы управления ими в полёте. В испытательных «полётах» участвовал сам Венделл Мур. В 1958 году на «сборке» удалось добиться стабильного полёта на высоте до 5 метров в течение трёх минут. Именно эти успехи впечатлили военных, предопределив выбор в пользу компании «Белл». Для ранца изготовили специальный ракетный двигатель. Общий вес ранца вместе с топливом составлял 57 кг. Ранец имел твёрдый стеклопластиковый корсет, изготовленный по форме тела. К корсету жёстко крепились баллоны с топливом и азотом. Двигательная установка крепилась шарнирно и управлялась подплечными рычагами. Тяга двигателя изменялась регулятором, соединённым с рукояткой на правом рычаге. Рукоятка на левом рычаге управляла отклоняемыми соплами. Пилот был пристёгнут к корсету ремнями.
Испытания созданного ранца начались в конце 1960 года. Все испытания проводились зимой в ангаре. 17 февраля 1971 года из-за страховочного троса произошла авария. Во время полёта ранец резко пошёл в сторону, выбрал длину троса, и тот лопнул. Пилот вместе с ранцем упал на левый бок с высоты примерно два с половиной метра. В результате у В.Мура была сломана коленная чашечка, и летать ему больше не посчастливилось. Эстафету испытательных полетов принял на себя коллега Мура, инженер Гарольд Грэм. 1 марта полёты были возобновлены. Г. Грэм выполнил 36 «привязных» испытательных взлётов, осваивая управление ранцем в воздухе. Наконец, ранец и пилот были готовы показать результаты тренировок.
Воодушевившись полетом первого человека в космос, американские инженеры 20 апреля 1961 на пустыре около аэропорта городка Ниагара Фоллс совершили первый в истории свободный полёт на ракетном ранце (на открытом пространстве и без привязи). Пилот Гарольд Грэм поднялся на высоту более метра и плавно пролетел вперёд со скоростью, примерно 10 км/ч, по прямой 35 метров и приземлился. Весь полет продолжался 13 секунд. Это была первая маленькая победа команды Венделла Мура. Реактивный ранец перестал быть фантастикой.
В ходе модернизации ранца были достигнуты следующие максимальные показатели:
- продолжительность полёта — 21 секунда;
- дальность полёта — 120 метров;
- высота — 10 метров;
- скорость — 55 км/ч.
8 июня 1961 года ранец был впервые продемонстрирован публично — перед несколькими сотнями офицеров на военной базе Форт-Юстис. Затем последовали другие публичные показы, в том числе знаменитый полёт во дворе Пентагона перед тремя тысячами сотрудников военного ведомства, которые с восторгом наблюдали, как Гарольд Грэм перелетает через легковую машину.
11 октября 1961 года ранец был продемонстрирован лично президенту Дж.Кеннеди в ходе показательных манёвров на военной базе Форт-Брагг. Грэм взлетел с корабля LST, перелетел через полосу воды, приземлился в нескольких метрах перед президентом и лихо отдал честь Главнокомандующему армии США. По свидетельству очевидцев, президент наблюдал за полётом, открыв рот от изумления.
Несмотря на все успехи Мура и его соавторов, армия была разочарована. По мнению военных, «Bell Rocket Belt» был скорее занимательной игрушкой, нежели эффективным транспортным средством. От дальнейшего финансирования программы SRLD военные отказались, контракт был прерван.
Спустя 4 года, Венделлу Муру предложили новый контракт по разработке ранца с турбореактивным двигателем.
7 апреля 1969 года на аэродроме Ниагара Фоллз состоялся первый свободный полет турбореактивного ранца «Jet Belt». Пилот Роберт Куртер пролетел около 100 метров по кругу на высоте 7 метров, достигнув скорости 45 км/ч. Следующие полёты были более продолжительными, до 5 минут. Теоретически новый ранец мог находиться в воздухе до 25 минут и развивать скорость до 135 км/ч.
Несмотря на успешные испытания, армия снова не проявила заинтересованности. Ранец был сложным в обращении и слишком тяжёлым. Приземление пилота с таким грузом на плечах было небезопасным. Кроме того, при повреждении двигателя лопатки турбин могли разлетаться с высокими скоростями, угрожая жизни пилота.
Несмотря на все конструктивные недостатки, этот проект был промежуточным этапом к созданию более совершенной машины.

Ранцы Венделла Мура
Martin Jetpack
Следующим шагом в развитии ранцевых летательных установок стала разработка компании Martin Aircraft.
Martin Jetpack — персональный сверхлегкий летательный аппарат вертикального взлета и посадки. Движители — воздушные винты малого диаметра в кольцевых каналах, вращаемые двухтактным двигателем внутреннего сгорания. По классификации FAA аппарат относится к классу сверхлёгких и не требует лицензии для выполнения полётов. В отличие от других устройств типа «реактивный ранец» Martin Jetpack является первым, готовым к практическому применению. Разработка проекта заняла 27 лет. По расчётам, Martin Jetpack может достигать скорости в 100 км/час, подниматься на высоту 2,5 км и держаться в воздухе на протяжении примерно получаса при полном баке. C 2012г. аппараты компании Martin Aircraft поступили в свободную продажу. Конструктивно и по принципу действия персональный летательный аппарат довольно схож с предшественниками, но имеет и ряд отличий. Для удобства пилотирования аппарат оборудован приборной доской, а для безопасности пилота -баллистическим парашютом.
Безусловно, если появятся средства и разработка продолжится, Martin Jetpack может быть улучшен по многим параметрам.

Martin Jetpack
Jet Man
Все рассмотренные выше ранцевые ЛА принадлежат к классу аппаратов вертикального взлета и посадки.
Jet Man-это разработка швейцарского конструктора и пилота Ив Росси, представляющая два симметричных крыла и прикрепленных к ним реактивных баллонов, которые являются силовой установкой. Летательный аппарат Ив Росси не предусматривает взлёт с земли — на нужную для старта высоту он поднимается на самолете, вертолете или воздушном шаре. Для посадки используется парашют, причём кроме посадочного и запасного, крыло Ива Росси оснащено также и собственным парашютом, который обеспечивает его мягкое приземление в случае, если возникнет необходимость сбросить крыло. Одной из особенностей проекта является полное отсутствие механизации крыла. Управление летательным аппаратом осуществляется за счёт смещения центра масс, однако в отличие от дельтаплана, где пилот может перемещаться под плоскостью крыла, в летательном аппарате Ива Росси крыло жёстко закреплено на спине. При этом манёвренность достаточна для выполнения фигур пилотажа различной сложности. На своих крыльях Ив Росси совершил множество полётов, в том числе перелетел Ла-Манш (2008), пролетел над Большим Каньоном, а также над швейцарскими Альпами в строю с двумя истребителями.
Несмотря на неудобство взлёта и посадки, в отличии от Martin Jetpack, крыло Ив Росси имеет следующие преимущества:
Вес ранца последней (на 2012 год) модели
- Полностью заправленного горючим (30 литров керосина) — 55 кг
- Максимальная скорость — 300 км/ч
Jet Man
Грифон
Одновременно c Jet Man, немецкой компанией Spelco был представлен аналогичный ранцевый летательный аппарат «Грифон».
Представители компании уверены, что их детище пригодится не только на войне. Его могут использовать, например, спасатели при работе в труднодоступных районах и при проведении поисково-спасательных операций.
Грифон
Skyflash Jetpack
Аналогичным по сути, но совершенно другим по исполнению, является модель Skyflash Jetpack. Отличительная особенность от предыдущих проектов — тележка, с помощью которой происходит необходимый для взлета разбег. В качестве силовой установки используются две микро-турбины дизельных двигателей. Данный проект находится в стадии испытаний.
Skyflash Jetpack
Ранец-вертолет
Еще одним направлением в создании индивидуальных ранцевых ЛА стал ранец-вертолет. Над его созданием в разное время трудились конструкторы нескольких стран.
Ранец-вертолет — персональный летательный аппарат, состоящий из вертолётного винта, двигателя и подвесной системы для пилота.
На сегодняшний день существует несколько видов такого ранца:
- с сидением/без него
- одно-/двухмоторные
Американские разработки
История создания вертолетного ранца началась в США как альтернатива парашюту. Самым слабым элементом конструкции оказалось использование ног пилота как шасси. Это было совершенно неправильно, и от этой идеи пришлось отказаться в пользу индивидуального вертолета RF-1 Pinwheel , который был спроектирован по контракту ВМС США с американской компанией «Rotor-Craft Corporation» под руководством Гилберта Макгилла , для «повышения мобильности военнослужащих».
Легкий вертолет оснащался небольшими ракетными двигателями которые устанавливались на концах лопастей несущего винта и приводили его во вращение. RF-1 был облетан в апреле 1954 года, интенсивно испытывался ВМС США — до весны 1960 года было выполнено около 300 испытательных полетов. Позже вертолет был поврежден и списан, а программа «Pinwheel» — закрыта.

Rotor-Craft RF-1 Pinwheel
Собратом Rotor-Craft RF-1 Pinwheel стал Solotrek XFV.
Solotrek — одноместный летательный аппарат вертикального взлёта и посадки, конструктивно представляющего собой вертолет поперечной схемы с винтами в кольцевых каналах . У микровертолета имеется 2 винта над головой пилота, а центр тяжести расположен немного ниже них. При весе 130 кг. он может подняться на высоту 2,5 км. Скорость полёта составляет 130 км/ч, дальность -200 км, продолжительность полёта-90 мин.

Solotrek XFV
Российские разработки
Российской разработкой стал десантно-штурмовой вертолет «ЮЛА» , который был впервые представлен ПО «Полёт» на выставке , проходившей в г. Омске в 1998г. Несущему винту вращение придавалось при помощи реактивной тяги малоразмерных двигателей, установленных на концах лопастей. При разгоне телескопические лопасти несущего винта раздвигались от 3 до 6 метров. Вес аппарата без учета топлива составлял 25 кг. При полной заправке (20 л. топлива ТС-1) аппарат обеспечивал продолжительность полёта до 20 минут со скоростью до 150 км/ч и высотой до 1000 м. В ранцевом вертолёте «Юла», по заявлению разработчика данного проекта Вячеслава Котельникова была учтена возможность использования режима авторотационного планирования. На выставке совместно с ранцевым вертолетом «ЮЛА» был представлен сверхмалый вертолет «Ночная бабочка» отличавшийся большими размерами и рамой со стационарно установленными опорами и креслом пилота. В 2000 году все работы по данным аппаратам были засекречены.
ЮЛА
Паралеты
Также к ранцевым ЛА следует отнести паралеты и мопарапланы из-за простоты их конструкций.
Силовая установка крепится за спиной пилота, а подъемная сила создается парашютом. В отличии от простого параплана, при полете на мотопараплане у человека пропадает зависимость от восходящих потоков.
- Крейсерская скорость паралета (паратрайка) составляет – 50 км/ч
- Дальность полета – до 120 км.
- Максимальная высота – 6800 метров
- Максимальная продолжительность полета – 1.5 часа
Наряду с моделями, испульзующими в качестве силовой установки ДВС, существуют модели парапланов с использованием реактивных установок. К таковым относится спидглайдер Троя Хартмана.
Благодаря большой продолжительности полета, паралеты и мотопарапланы является одними из популярнейших ранцевых ЛА.
Паралет
УПМК
Если на парапланах и паралетах, имея желание и отсутствие медицинских противопоказаний, может летать абсолютно любой человек, то на следующем виде ранцевой установки доводится полетать даже не всем космонавтам, потому как задачи связанные с выходом в открытый космос ставятся не каждому члену экипажа. Сейчас речь пойдет об установках для перемещения космонавта в открытом космосе.
Для создания таких установок советским и американским инженерам пришлось много потрудиться, ведь выходя в открытый космос, космонавт должен быть уверен в своем возвращении на корабль. Для этого было разработано и изготовлено несколько видов установок для перемещения и маневрирования космонавта, это:
- HHMU — ручное реактивное устройство «самострел», представляет собой пистолет, выбрасывающий газовую струю (газ подается через шланг от кислородной системы скафандра), использовалось американскими астронавтами на кораблях «Джемини».
- УПМК, разработанная для программы «Восход» и затем для военной орбитальной станции «Алмаз» (не использовалась).
- AMU (Astronaut Maneuvering Unit) — первое американское устройство «ранцевого» типа
- Американский «Пилотируемый маневрирующий модуль», испытанный во время полетов шаттлов в 1984г.
- УПМК 21КС — разработанная для выходов в космос с борта орбитальной космической станции «Мир». Использовалась космонавтами А.Серебровым и А.Викторенко в выходах 1-го 5-го февраля 1990г.
Установка для перемещения и маневрирования космонавта (УПМК) — система, позволяющая космонавту перемещаться в невесомости вне космического корабля.
Советские разаботки
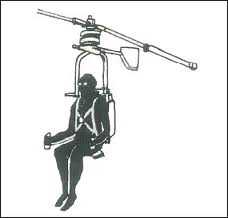
Установка УПМК 21КС — позволяет космонавту в скафандре «Орлан-ДМА» перемещаться с 6-ю степенями свободы. Выполнена установка маневрирования в виде ранца. На Земле с таким «ранцем» не сдвинуться с места — ведь его масса 218 кг. Но в космосе такой проблемы нет, здесь нужно решить другую задачу: надежно зафиксировать скафандр в установке. С этой целью сконструирован специальный жесткий пояс — шпангоут. В его надежных объятиях и находится космонавт. К шпангоуту прикреплены поворотные телескопические штанги, на концах которых расположены пульты управления. Рабочим телом для 32 реактивных двигателей служит воздух. Необходимо отметить, что для надежности все основные элементы установки продублированы. Поэтому и система исполнительных органов для движения в космосе состоит из двух полукомплектов. В состав каждого входит 28-литровый баллон со сжатым воздухом, максимальное давление в котором 350 атм. Подавая команду с помощью тумблера на пульте, космонавт открывает электропневмоклапан, и воздух устремляется в трубопровод. Однако давление в баллоне слишком велико для пневмосистемы, а потому воздух проходит сначала через редуктор, понижающий давление до 12,5 атм. Вот теперь газ поступает в 16 реактивных микродвигателей. Они расположены по углам «ранца» и в зависимости от направления истекающей воздушной струи могут двигать его по прямой или закручивать. Система устроена так, что сначала работает один полукомплект. Когда давление в его баллоне падает до 110 атм, он отключается. Теперь настает очередь второго полукомплекта. В его баллоне воздух может быть израсходован полностью. Космонавту нет необходимости следить за тем, сколько воздуха осталось. Давление 110 атм выбрано из того условия, чтобы можно было вернуться на корабль при максимальном стометровом удалении от него. Оба полукомплекта связаны между собой клапаном перепуска, который позволяет в случае отказа редуктора или микродвигателей одного полукомплекта перепустить воздух в другой полукомплект.
На внешней поверхности ранца расположены навигационные огни и фара. Все системы питаются энергией основного и резервного серебряно-цинковых аккумуляторов. Радиотелеметрическая система служит для сбора информации с датчиков, ее обработки, передачи на базовый блок и далее транзитом с помощью бортовых средств на Землю. Система регистрирует около 100 параметров, позволяющих полностью контролировать работу установки. Для повышения надежности все параметры скафандра и установки маневрирования передаются радиотелеметрической системой одновременно, обмен информацией осуществляется по электрокабелю, соединяющему установку со скафандром. По нему же скафандр обеспечивается резервным электропитанием.

Установка для перемещения и маневрирования космонавта
Интересные факты
А теперь немного интересных фактов, связанных с применением ранцевых ЛА в массовой культуре.
- Реактивный ранец присутствовал в игре Duke Nukem 3D. Он был малореалистичен, передвижение на ранце больше напоминало не полёт, а ходьбу в произвольном направлении.
- Также реактивный ранец появился в 2004г. в игре GTA^San Andreas. Там он был представлен в виде транспортного средства и назывался «Black Project»
- Реактивный ранец был задействован в концертном турне Майкла Джексона. В нём он, или каскадер, в конце концерта улетал со сцены, приводя публику в изумление.
- Ещё одно знаменитое появление ранца произошло на открытии Летних Олимпийских игр в Лос-Анджелесе в 1984 г. Пилотировал ранец Билл Сьютор, легендарная личность (всего на его счету свыше 1200 полётов — больше, чем у любого другого пилота по сей день). Билл взлетел из-за трибун, пролетел над рядами зрителей, которые от неожиданности прикрывали головы руками, и приземлился напротив президентской трибуны, где сидел Рональд Рейган. Полет наблюдали 100 000 зрителей на трибунах и около 2,5 миллиардов телезрителей в всем мире.
- Ранец-вертолет появлялся в фильме «Агент Коди Бенкс». Сцена, где агент Коди Бэнкс и его наставник из ЦРУ Роника Майлз проникают в логово злодея, однако полет был создан аниматорами.
На выступлении М.Джексона
Выводы
- Первые ранцевые ЛА появились в конце 50-х годов XX века.
- Существует множество видов ранцевых ЛА, которые различаются в зависимости от силовой установки.
- Ранцевые ЛА часто используются в массовой культуре.
- На данный момент иметь ранцевый летательный аппарат дорогое удовольствие.
- Наиболее широкое применение получили парапланы, паралеты и гидроранцы.
- Если на земле ранец зачастую используется в качестве аттракциона, то при выходе человека в открытое космическое пространство-это неотъемлемая часть экипировки космонавта.
Заключение
Представим себе утро солнечного дня, выпив чашку кофе Вы выходите на балкон, надеваете ранец и прямо с балкона, ощущая прохладу летнего утра, минуя проклятущие пробки, мчитесь на встречу новому дню. Конечно, сейчас это кажется кадрами фантастического фильма, но как знать….
Ведь тот же автомобиль, изобретённый Фердинантом Вербистом еще в 1672 году, как игрушка для китайского императора, спустя годы превратился в предмет роскоши, а за тем в повседневное средство передвижения, жизнь без которого мы сегодня не можем себе представить.
Подводя итог своей историко-исследовательской работы, я все больше убеждаюсь, что ранцевые ЛА с развитием компьютерных технологий, замененной существующих силовых установок на электрические двигателей, сокращением размеров и веса аккумуляторов может быть не в скором будущем, но обязательно получат широкое применение в повседневной жизни человека.
Список используемых источников
olymp.as-club.ru
Летательный аппарат
Изобретение относится к области вооружения. Летательный аппарат содержит корпус и дестабилизаторы, которые выполнены флюгерными и снабжены противовесами. Каждый из дестабилизаторов состоит из пластины, переходящей в узел крепления и узел ограничения флюгирования. Узел крепления размещен в отверстии носовой части корпуса и выполнен с возможностью ограниченного поворота в пределах диапазона углов флюгирования δ≤40 градусов. Противовес соединен с узлом крепления. При использовании изобретения обеспечивается безопасное отделение от пусковой установки. 19 з.п. ф-лы, 10 ил.
Летательный аппарат относится к области авиационной и ракетной техники, в частности к летательным аппаратам, стартующим с пусковых установок воздушного, наземного и морского базирования.
Известен летательный аппарат, выполненный в виде ракеты по аэродинамической схеме «утка» (пат. RU №2094748, МПК 6, F 42 B 15/00, С1, 23.05.1996), содержащей корпус, размещенные в нем двигательную установку, аппаратуру системы наведения и управления, а также боевое снаряжение, расположенные на корпусе равномерно относительно его продольной оси четыре неподвижных крыла с кинематически связанными между собой четырымя элеронами, в тандеме с крыльями четыре управляющих, соединенных попарно противоположно расположенных аэродинамических руля, четыре неподвижных дестабилизатора, установленных перед рулями, и четыре флюгерных датчика углов атаки, установленные перед дестабилизаторами. Недостатком указанного технического решения является то, что при разных по форме и массе носовых частях ракеты, например, со сменными головками самонаведения разного типа, вследствие изменения центровки ракеты изменяются ее балансировочные характеристики, что приводит в конечном итоге к ухудшению ее маневренности. Кроме того, указанный летательный аппарат имеет значительные габариты вследствие использования нескладных аэродинамических поверхностей (рулей и крыльев).
Известен летательный аппарат, выполненный в виде ракеты (пат. RU №2215981, МПК 7, F 42 B 15/00, С2, 05.12.2001), содержащей осесимметричный фюзеляж, оборудованный воздухозаборником и складывающимися крыльями, и оперение. Недостатком указанного летательного аппарата являются возможные отрицательные последствия при старте ракеты со сложенными крыльями и рулями с пусковой установки носителя вследствие того, что ракета на этом этапе полета неустойчива, это может привести к столкновению с носителем либо к непредсказуемой траектории полета.
Известен летательный аппарат, выполненный в виде ракеты по аэродинамической схеме «утка» (пат. RU №2111446, МПК 6, F 42 B 15/00, С1, 18.03.1997), содержащей корпус, размещенные в нем двигательную установку, аппаратуру системы наведения и управления, а также боевое снаряжение. На корпусе расположены четыре неподвижных крыла с элеронами, в тандеме с ними четыре соединенных попарно аэродинамических руля, перед которыми установлены четыре неподвижных дестабилизатора. Рассмотренный летательный аппарат позволяет иметь примерно одинаковые балансировочные характеристики при разных по форме его носовых частях. Однако недостатком является значительные габариты вследствие использования нескладных аэродинамических поверхностей рулей и крыльев. Указанное техническое решение является наиболее близким аналогом для заявленного предложения и выбрано в качестве прототипа.
Задачей изобретения является создание летательного аппарата безопасного отделения от пусковой установки, размещенной на воздушных, морских и наземных носителях, который также имеет возможность применения сменных головных частей при меньшей зависимости от этого его балансировочных характеристик, а также повысить аэродинамическое качество летательного аппарата.
Под аэродинамическим качеством летательного аппарата понимается отношение подъемной силы, действующей на летательный аппарат, к аэродинамическому сопротивлению при данных условиях полета (см. Энциклопедия «Авиация» гл. ред. Г.П.Свищев, научное изд-во «Российская энциклопедия»; ЦАГИим проф. Н.Е.Жуковского, М., 1994, стр.87).
Подробнее раскроем задачу, на решение которой направлено изобретение, с указанием обеспечиваемого им технического результата.
В последнее время все большее применение находят ракеты модульной конструкции. Модульность предусматривает применение различных блоков и агрегатов на так называемом базовом модуле для расширения диапазона тактического применения ракеты в различных ее исполнениях, что, в свою очередь, влечет за собой изменение характеристик устойчивости и управляемости ракет вследствие изменения их центровки и запаса статической устойчивости. Некоторые модульные варианты, обладающие чрезмерной статической устойчивостью, требуют установки дестабилизаторов в носовой части, которые сдвигают аэродинамический фокус ракеты вперед и восстанавливают присущие всему модульному ряду запас статической устойчивости и характеристики управляемости.
Потребная площадь дестабилизаторов гораздо меньше по сравнению с площадью рулей и крыльев ракеты, т.к. носовая часть ракеты, как правило, длиннее хвостовой. Поэтому в отличие от крыльев и рулей дестабилизаторы не приходится складывать при размещении ракеты внутри самолета, а также на внешней подвеске под самолетом.
Старт ракеты, оснащенной дестабилизаторами, крылья и рули которой находятся в процессе раскладывания, является сложным и опасным мероприятием из-за того, что на этом этапе полета ракета статически неустойчива. Неустойчивость ракеты при ее отделении от носителя может привести к столкновению с последним, а также к сбою наведения ракеты на цель. Проблема может быть решена путем мгновенного раскладывания рулей и крыльев, но это приведет к существенному повышению запаса прочности последних, к увеличению массы и стоимости всей ракеты.
Данное изобретение позволяет повысить безопасность носителя при старте ракеты, избежать применения дорогих быстродействующих кинематических механизмов раскладывания крыльев и рулей, а также повысить аэродинамическое качество ракеты на всех режимах полета.
Указанные технические результаты достигаются тем, что в известное техническое решение, выбранное прототипом и содержащее корпус летательного аппарата, введены К, где К=2, 3, 4 флюгерных дестабилизатора, каждый из которых состоит из пластины, переходящей в узел крепления, противовеса, соединенного с узлом крепления, и узла ограничения флюгирования, при этом узел крепления размещен в отверстии в носовой части корпуса летательного аппарата и выполнен с возможностью ограниченного поворота в пределах диапазона углов флюгирования δ≤40 градусов.
В частных случаях, в конкретных формах выполнения или при особых условиях использования изобретение характеризуется следующими признаками: летательный аппарат содержит два флюгерных дестабилизатора, расположенных в горизонтальной плоскости летательного аппарата на противоположных сторонах относительно его продольной оси; летательный аппарат содержит два флюгерных дестабилизатора, расположенных в вертикальной плоскости летательного аппарата на противоположных сторонах относительно его продольной оси; летательный аппарат содержит три флюгерных дестабилизатора, расположенных равномерно относительно продольной оси корпуса летательного аппарата, при этом один из флюгерных дестабилизаторов расположен вверху корпуса летательного аппарата; летательный аппарат содержит три флюгерных дестабилизатора, расположенных равномерно относительно продольной оси корпуса летательного аппарата, при этом один из флюгерных дестабилизаторов расположен внизу корпуса летательного аппарата; летательный аппарат содержит четыре флюгерных дестабилизатора, расположенных равномерно относительно продольной оси корпуса летательного аппарата «икс»-образно; летательный аппарат содержит четыре флюгерных дестабилизатора, расположенных равномерно относительно продольной оси корпуса летательного аппарата «плюс»-образно; летательный аппарат выполнен в виде ракеты; летательный аппарат выполнен в виде авиационной бомбы; летательный аппарат выполнен в виде планирующей торпеды; летательный аппарат выполнен в виде самолета; летательный аппарат выполнен в виде планера; летательный аппарат выполнен в виде отделяемого контейнера; между корпусом летательного аппарата и узлом крепления размещен поворотный узел; поворотный узел выполнен в виде двух подшипников, закрепленных в корпусе летательного аппарата; поворотный узел выполнен в виде цилиндрической втулки вращения, закрепленной в корпусе летательного аппарата; поворотный узел выполнен в виде двух цилиндрических втулок вращения, одна из которых закреплена в корпусе летательного аппарата, а вторая — на узле крепления; узел ограничения флюгирования выполнен в виде двух ограничительных элементов, расположенных на корпусе летательного аппарата на противоположных сторонах относительно его продольной оси, на которой размещен флюгерный дестабилизатор; узел ограничения флюгирования выполнен в виде двух расположенных на противовесе упорных кромок, обеспечивающих возможность упора в торец внутреннего пояса корпуса летательного аппарата; пластина выполнена спрофилированной.
Техническим результатом в частном случае при выполнении летательного аппарата в виде ракеты является уменьшение массогабаритных характеристик ракеты, уменьшение мощности ее рулевых приводов и, как следствие, снижение их энергопотребления. На крейсерском режиме полета, когда углы атаки летательного аппарата малы, флюгерные дестабилизаторы устанавливаются по потоку и летательный аппарат обладает повышенной статической устойчивостью. Кроме того, нулевой угол атаки флюгерных дестабилизаторов способствует достижению максимально возможных скоростей полета при заданной аэродинамической компоновке. При выходе летательного аппарата на большие углы атаки флюгерные дестабилизаторы стопорятся ограничительными элементами (становятся на упоры) и ракета становится менее устойчивой из-за того, что флюгерные дестабилизаторы больше не флюгируют и приобретают соответствующее их углу атаки значение производной коэффициента подъемной силы по углу атаки. В результате аэродинамический фокус летательного аппарата сдвигается вперед, потери на балансировку уменьшаются, вследствие чего диапазон располагаемых перегрузок расширяется и повышается маневренность летательного аппарата. Таким образом, применение флюгерных дестабилизаторов позволяет повысить аэродинамическое качество летательного аппарата на всех режимах полета.
Сущность предлагаемого изобретения заключается в том, что при введении флюгерных дестабилизаторов, имеющих нулевое значение производной коэффициента подъемной силы по углу атаки в диапазоне допустимых углов атаки пуска, летательный аппарат в момент его отделения от пусковой установки воздушного, наземного или морского базирования становится статически устойчивым аэродинамическим объектом. Другими словами, флюгерные дестабилизаторы не участвуют в создании неустойчивости на стартовом участке, но при положительном значении их собственного аэродинамического момента, а значит, и положительного коэффициента подъемной силы позитивно влияют на балансировку летательного аппарата на всех режимах полета. Данное изобретение позволяет повысить безопасность носителя при старте ракеты в диапазоне допустимых углов атаки пуска и повысить аэродинамическое качество летательного аппарата.
На фиг.1 изображен общий вид предлагаемого летательного аппарата, на фиг.2 — чертеж флюгерного дестабилизатора, а на фиг.3 — его сечение в плоскости А-А. На фиг.4, 5, 6, 7, 8, 9 приведены расположения флюгерных дестабилизаторов согласно зависимым п.п.6, 7, 5, 4, 2, 3 формулы изобретения соответственно. На фиг.10 представлена зависимость коэффициента продольного момента летательного аппарата mz от угла атаки летательного аппарата α, где обозначены — производная коэффициента подъемной силы флюгерного дестабилизатора по углу атаки α, ФД — флюгерный дестабилизатор, для случаев: без ФД — (штриховая линия), с ФД — (сплошная линия) и ФД на упорах — точка А.
Отметим, что на фиг.1 летательный аппарат для конкретности представлен в виде, более близком к ракете, т.е. по пункту 8 формулы изобретения. Однако вследствие «вырыва» центральной части волнистыми линиями летательный аппарат на фиг.1 можно трактовать и по п.п.9, 10, 11, 12, 13 как авиационную бомбу, планирующую торпеду, самолет, планер, отделяемый контейнер. Это правомерно, поскольку используемый заявителем признак: «летательный аппарат» охарактеризован в формуле изобретения общим понятием, охватывающим разные частные формы его реализации: ракета, самолет, планер, авиационная бомба, планирующий контейнер. Все они обеспечивают в совокупности с другими признаками получение технического результата — безопасного отделения от пусковой установки указанных средств и улучшения их летно-технических характеристик.
Летательный аппарат содержит корпус летательного аппарата 1, К, где К=2, 3, 4 флюгерных дестабилизатора 2, каждый из которых состоит из пластины 3, переходящей в узел крепления 4, противовеса 5 и узла ограничения флюгирования 6, который на фиг.2 и 3 изображен согласно п.19 формулы изобретения. Кроме того, на фиг.1, 2 и 3 показаны: поворотный узел, выполненный согласно п.15 формулы изобретения и состоящий из двух подшипников 7, крепежные элементы-штифт 8 и два винта 9, два ограничительных элемента 10, а также носовая часть корпуса летательного аппарата 11, продольная ось летательного аппарата 12, ось вращения флюгерного дестабилизатора 13, упорные кромки противовеса 14 и торец внутреннего пояса корпуса летательного аппарата 15 /две последних позиции 14 и 15 образуют узел ограничения флюгирования 6 по п.19 формулы изобретения/, а также изображен диапазон углов флюгирования δ.
При выполнении поворотного узла в виде двух подшипников 7 (п.15 формулы) последние снижают трение при флюгировании флюгерного дестабилизатора 2. Подшипники 7 также воспринимают и передают на корпус летательного аппарата перерезывающую силу и изгибающий момент от флюгерных дестабилизаторов 2. Выполнение поворотного узла согласно п.п.16, 17 формулы в виде цилиндрических втулок вращения очевидно и является другой реализацией поворотного узла. Противовес 5 крепится к узлу крепления 4 винтами 9. Угловая фиксация противовеса 5 относительно флюгерного дестабилизатора обеспечивается штифтом 8. Центр тяжести системы «противовес 5 — флюгерный дестабилизатор 2» проходит через ось вращения флюгерного дестабилизатора 13, так чтобы вес этой системы не влиял на ее работу. Противовес 5 совместно с торцем внутреннего пояса корпуса летательного аппарата 15 работает и как ограничитель вращения флюгерного дестабилизатора 2, т.е. представляет собой узел ограничения флюгирования 6 согласно п.18 формулы изобретения. При повороте флюгерного дестабилизатора 2 на максимальный угол происходит упор упорных кромок противовеса 14 в торец внутреннего пояса корпуса летательного аппарата 15 и дальнейший поворот флюгерного дестабилизатора 2 невозможен (см. фиг.2). При реализации узла ограничения флюгирования 6 по п.18 формумы изобретения он представляет два ограничительных элемента 10, которые препятствуют повороту пластины 3 на углы большие относительно продольной оси летательного аппарата 12.
Следует учитывать, что старт с пусковых установок наземного и морского базирования таких летательных аппаратов, как авиационная бомба, планирующая торпеда и отделяемый контейнер, естественно невозможен; для них применяется старт с пусковых установок воздушного базирования.
Безопасное отделение летательного аппарата в конфигурации со сложенными крыльями и рулями, стартующего с пусковых установок воздушного, наземного или морского базирования, происходит следующим образом. По команде происходит отделение летательного аппарата от пусковой установки. При этом в первый момент отделения от носителя флюгерные дестабилизаторы 2, размещенные в носовой части корпуса летательного аппарата 11, свободно ориентируются с нулевым углом атаки по вектору скорости, равному геометрической сумме векторов скорости носителя и начальной скорости отделения, и не создают дестабилизирующего момента, несмотря на то что их (флюгерных дестабилизаторов 2) собственный аэродинамический момент может быть и положительным. Флюгирование флюгерных дестабилизаторов 2 не позволяет летательному аппарату быть неустойчивым в конфигурации со сложенными аэродинамическими поверхностями. Это обстоятельство препятствует появлению опасных траекторий летательного аппарата при отделении вблизи носителя до раскрытия крыльев и рулей. После раскрытия крыльев и рулей летательный аппарат приобретает статическую устойчивость и уже становится безопасным для носителя. На фиг.10 представлена зависимость коэффициента продольного момента летательного аппарата mz от угла атаки летательного аппарата α, где обозначены — производная коэффициента подъемной силы по углу атаки (флюгерного дестабилизатора, ФД — флюгерный дестабилизатор, для случаев: без ФД — (штриховая линия), с ФД — (сплошная линия), и ФД на упорах — точка А; указанная зависимость представлена для случая летательного аппарата в крейсерской конфигурации, т.е. когда все складываемые аэродинамические поверхности летательного аппарата разложены. Эффект от флюгирования флюгерного дестабилизатора 2 проявляется только на углах атаки летательного аппарата, при которых флюгерные дестабилизаторы 2 свободно ориентируются по потоку. На этих углах атаки ракета обладает повышенной устойчивостью;(на фиг.10, на участке ОА штриховая линия совпадает со сплошной, т.е. коэффициент продольного момента летательного аппарата с ФД и без ФД совпадают). При выходе на углы атаки α, при которых флюгерные дестабилизаторы 2 «встают на упоры», например на ограничительные элементы 10, летательный аппарат становится менее устойчивым (на фиг.10 штриховая линия — без ФД находится ниже сплошной — с ФД), а значит, и более маневренным. Таким образом из фиг.10 следует, что флюгерные дестабилизаторы 2 повышают летно-технические характеристики летательного аппарата.
1. Летательный аппарат, содержащий корпус и дестабилизаторы, отличающийся тем, что дестабилизаторы выполнены флюгерными и снабжены противовесами, каждый из дестабилизаторов состоит из пластины, переходящей в узел крепления, и узла ограничения флюгирования, при этом узел крепления размещен в отверстии носовой части корпуса и выполнен с возможностью ограниченного поворота в пределах диапазона углов флюгирования δ≤40 градусов, а противовес соединен с узлом крепления.
2. Летательный аппарат по п.1, отличающийся тем, что содержит два флюгерных дестабилизатора, расположенных в горизонтальной плоскости летательного аппарата на противоположных сторонах относительно его продольной оси.
3. Летательный аппарат по п.1, отличающийся тем, что содержит два флюгерных дестабилизатора, расположенных в вертикальной плоскости летательного аппарата на противоположных сторонах относительно его продольной оси.
4. Летательный аппарат по п.1, отличающийся тем, что содержит три флюгерных дестабилизатора, расположенных равномерно относительно продольной оси корпуса летательного аппарата, при этом один из флюгерных дестабилизаторов расположен вверху корпуса летательного аппарата.
5. Летательный аппарат по п.1, отличающийся тем, что содержит три флюгерных дестабилизатора, расположенных равномерно относительно продольной оси корпуса летательного аппарата, при этом один из флюгерных дестабилизаторов расположен внизу корпуса летательного аппарата.
6. Летательный аппарат по п.1, отличающийся тем, что содержит четыре флюгерных дестабилизатора, расположенных равномерно относительно продольной оси корпуса летательного аппарата «икс»-образно.
7. Летательный аппарат по п.1, отличающийся тем, что содержит четыре флюгерных дестабилизатора, расположенных равномерно относительно продольной оси корпуса летательного аппарата «плюс»-образно.
8. Летательный аппарат по любому из пп.1-7, отличающийся тем, что он выполнен в виде ракеты.
9. Летательный аппарат по любому из пп.1-7, отличающийся тем, что он выполнен в виде авиационной бомбы.
10. Летательный аппарат по любому из пп.1-7, отличающийся тем, что он выполнен в виде планирующей торпеды.
11. Летательный аппарат по любому из пп.1-7, отличающийся тем, что он выполнен в виде самолета.
12. Летательный аппарат по любому из пп.1-7, отличающийся тем, что он выполнен в виде планера.
13. Летательный аппарат по любому из пп.1-7, отличающийся тем, что он выполнен в виде отделяемого контейнера.
14. Летательный аппарат по п.1, отличающийся тем, что между корпусом летательного аппарата и узлом крепления размещен поворотный узел.
15. Летательный аппарат по п.14, отличающийся тем, что поворотный узел выполнен в виде двух подшипников, закрепленных в корпусе летательного аппарата.
16. Летательный аппарат по п.14, отличающийся тем, что поворотный узел выполнен в виде цилиндрической втулки вращения, закрепленной в корпусе летательного аппарата.
17. Летательный аппарат по п.14, отличающийся тем, что поворотный узел выполнен в виде двух цилиндрических втулок вращения, одна из которых закреплена в корпусе летательного аппарата, а вторая — на узле крепления.
18. Летательный аппарат по п.1, отличающийся тем, что узел ограничения флюгирования выполнен в виде двух ограничительных элементов, расположенных на корпусе летательного аппарата на противоположных сторонах относительно его продольной оси, на которой размещен флюгерный дестабилизатор.
19. Летательный аппарат по п.1, отличающийся тем, что узел ограничения флюгирования выполнен в виде двух расположенных на противовесе упорных кромок изготовленных с возможностью упора в торец внутреннего пояса корпуса летательного аппарата.
20. Летательный аппарат по п.1, отличающийся тем, что пластина выполнена спрофилированной.
findpatent.ru
TMStudent: Обзор факультета «Специальное машиностроение» МГТУ им.Баумана

Факультет СМ — один из самых крупных и исторически значимых факультетов МГТУ им.Баумана. Он основан в 1938 году. В 2013 году нашему факультету исполнилось 75 лет.
Немного из истории
До революции 1917 года в Бауманском училище было всего два факультета: химический и машиностроительный. После революции были основаны и другие факультеты, а машиностроительный разделился на два: СМ и МТ. Факультет СМ объединил в себе все конструкторские специальности, а МТ – технологические. До сих пор эти два факультета негласно спорят, кто же из них является истинным наследником факультета М.
Секретные разработки
Уже много лет наш факультет выпускает специалистов для ракетно-космического и оборонного комплекса нашей страны. Наши выпускники внесли значительный вклад в создание ракет, космических аппаратов и военной техники. Немногие знают, но МГТУ — это не только учебное заведение, но и проектировочный центр оборонной техники нашей страны: здесь ведется множество секретных военных разработок, в которых принимают участие преподаватели и некоторые аспиранты. Большинство разработок принадлежит именно факультету СМ.
Кафедры
Кафедра СМ-1 – «Космические аппараты и ракеты-носители». Кафедра была создана в 1948 году при участии академика С.П.Королева. В лаборатории кафедры собраны образцы ракетной техники, в том числе и той, которая сыграла немаловажную роль в истории. С помощью ракеты «Р-7» был запущен первый искусственный спутник Земли, а на базе «ОР-200» была создана ракета «Протон».
Кафедра СМ-2 – «Аэрокосмические системы». Основана в 1960 году академиком В.Н.Челомеем. В лаборатории этой кафедры находится уменьшенная копия ракетно-космической системы для пилотируемых полетов, занимающая три этажа.
Кафедра СМ-3 – «Динамика и управление полетом ракет и космических аппаратов». Здесь в лаборатории находятся аэродинамические трубы для звукового и сверхзвукового потоков, которые применяются в процессе обучения студентов и для научно-исследовательских работ.
Кафедра СМ-4 – «Высокоточные летательные аппараты». Нет, это не самолеты. Эта кафедра занимается средствами поражения и боеприпасами, проектирует высокоточные взрывные устройства. Здесь ведутся разработки промышленных взрывных технологий, а также технических средств противодействия терроризму на базе нанотехнологий.
Кафедра СМ-5 – «Автономные информационные и управляющие устройства». Основана в 1956 году. Эта кафедра создает устройства, которые распознают всевозможные препятствия на пути движения механизма, и управляют этим механизмом. К примеру: самонаводящиеся ракеты или любые беспилотные объекты, а также системы стыковки и посадки космических аппаратов.
Кафедра СМ-6 – «Ракетные и импульсные системы». В основном эта кафедра занимается противотанковыми и зенитными ракетами и вообще практически любым вооружением. У этой кафедры в Дмитровском филиале находится научно-исследовательский комплекс. Почему так далеко? Потому что для такого рода комплекса нужны обширные территории.
Кафедра СМ-7 – «Специальная робототехника и мехатроника». Эта кафедра готовит специалистов по двум направлениям. Специалисты по мехатронике смогут обеспечить точность связи механических узлов и электронных, компьютерных компонентов, т.е. станки с ЧПУ, транспортные средства автоматического управления и бытовая техника. Специалисты по робототехнике смогут создавать разнообразных роботов специального назначения, будь то роботы саперы, роботы для подводных работ или марсоходы.
Кафедра СМ-8 – «Стартовые ракетные комплексы». На этой кафедре вы сможете получить такие специализации как: «Пусковое и установочное оборудование»; «Система заправки и термостатирования»; «Техническая эксплуатация ракетных комплексов». Стартовые комплексы могут быть не только для космических аппаратов, но также и для боевых ракет.
Кафедра СМ-9 – «Многоцелевые гусеничные машины и мобильные роботы». Этой кафедре уже более 65 лет. Ну и, конечно же, как вы уже догадались именно сюда приходят фанаты игры «World of Tanks». Основная специализация — это всевозможные танки, БТР, БМП и другие военные вездеходы на гусеницах. После 1966 года, когда по личному приказу С.П.Королева кафедра разработала «Луноход-1» и «Луноход-2», появилась еще одна специализация. К сожалению, в настоящее время стоит вопрос об упразднении этой специализации и создании общей программы, в которой будут учитываться оба направления.
Кафедра СМ-10 – «Колесные машины». Эта кафедра очень близка по своему содержанию к кафедре СМ-9, с единственной разницей: все те же военные вездеходы, но на колесах (само собой, полноприводные). Не важно, закончили вы СМ 9 или 10, вы можете идти на любое из этих направлений, потому что специальность, указываемая в дипломе одинакова: «Многоцелевые машины специального назначения». Заведующий этой кафедры является выпускником СМ-9. В настоящий момент по слухам ведется подготовка по слиянию двух кафедр: СМ-9 и СМ-10.
Кафедра СМ-11 – «Подводные аппараты и роботы». Выпускники этой кафедры смогут создавать всевозможные аппараты, предназначенные в основном для исследований в мировом океане. Эта отрасль очень перспективна, так как мировой океан исследован намного меньше, чем поверхность Земли. Манипуляторы, системы управления под водой, тренажеры с имитацией среды для подготовки операторов подводных аппаратов – все это является объектом изучения этой кафедры.
Кафедра СМ-12 – «Технологии ракетно-космического машиностроения». Эта кафедра готовит специалистов в области инновационных технологий, основанных на теории принятия конструктивно-технологических решений, технологической наследственности, проектировании производственных систем, основ диагностики технологических систем. Практика проходит как в Дмитровском филиале, так и на ведущих машиностроительных заводах нашей страны.
Кафедра СМ-13 – «Ракетно-космические композитные конструкции». Это самая молодая кафедра. Она основана в 2002 году. Композиционные материалы, которые намного облегчают жизнь конструктора, так как они одновременно сочетают в себе высокую удельную прочность, жесткость и износостойкость, получили широкое распространение сравнительно недавно, именно поэтому эта кафедра настолько младше всех остальных. Однако это очень перспективное направление в технической сфере. «Почему она не на МТ?» — спросите вы (ведь это технологическая специальность). Потому что основной предмет изучения на данной кафедре – применение композиционных материалов в ракетостроении.
tmstudent.ru