
АВИАЦИОННЫЕ БОРТОВЫЕ ПРИБОРЫ | Энциклопедия Кругосвет
Содержание статьиАВИАЦИОННЫЕ БОРТОВЫЕ ПРИБОРЫ, приборное оборудование, помогающее летчику вести самолет. В зависимости от назначения авиационные бортовые приборы делятся на пилотажно-навигационные, приборы контроля работы авиадвигателей и сигнализационные устройства. Навигационные системы и автоматы освобождают пилота от необходимости непрерывно следить за показаниями приборов. В группу пилотажно-навигационных приборов входят указатели скорости, высотомеры, вариометры, авиагоризонты, компасы и указатели положений самолета. К приборам, контролирующим работу авиадвигателей, относятся тахометры, манометры, термометры, топливомеры и т.п.
В современных бортовых приборах все больше информации выносится на общий индикатор. Комбинированный (многофункциональный) индикатор дает возможность пилоту одним взглядом охватывать все объединенные в нем индикаторы. Успехи электроники и компьютерной техники позволили достичь большей интеграции в конструкции приборной доски кабины экипажа и в авиационной электронике. Полностью интегрированные цифровые системы управления полетом и ЭЛТ-индикаторы дают пилоту лучшее представление о пространственном положении и местоположении самолета, чем это было возможно ранее.
Новый тип комбинированной индикации – проекционный – дает пилоту возможность проецировать показания приборов на лобовое стекло самолета, тем самым совмещая их с панорамой внешнего вида. Такая система индикации применяется не только на военных, но и на некоторых гражданских самолетах.
ПИЛОТАЖНО-НАВИГАЦИОННЫЕ ПРИБОРЫ
Совокупность пилотажно-навигационных приборов дает характеристику состояния самолета и необходимых воздействий на управляющие органы. К таким приборам относятся указатели высоты, горизонтального положения, воздушной скорости, вертикальной скорости и высотомер. Для большей простоты пользования приборы сгруппированы Т-образно. Ниже мы кратко остановимся на каждом из основных приборов.
Указатель пространственного положения.
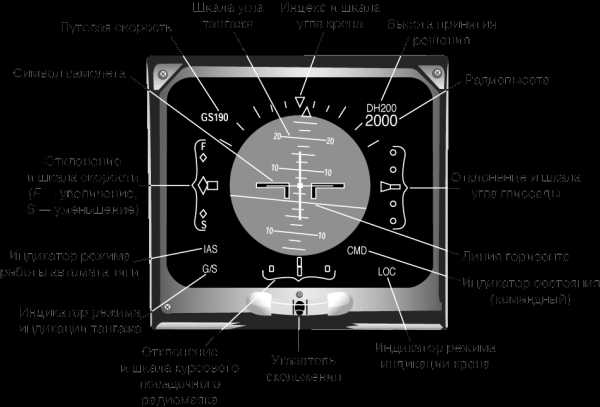
Указатель пространственного положения представляет собой гироскопический прибор, который дает пилоту картину внешнего мира в качестве опорной системы координат. На указателе пространственного положения имеется линия искусственного горизонта. Символ самолета меняет положение относительно этой линии в зависимости от того, как сам самолет меняет положение относительно реального горизонта. В командном авиагоризонте обычный указатель пространственного положения объединен с командно-пилотажным прибором. Командный авиагоризонт показывает пространственное положение самолета, углы тангажа и крена, путевую скорость, отклонение скорости (истинной от «опорной» воздушной, которая задается вручную или вычисляется компьютером управления полетом) и представляет некоторую навигационную информацию. В современных самолетах командный авиагоризонт является частью системы пилотажно-навигационных приборов, которая состоит из двух пар цветных электронно-лучевых трубок – по две ЭЛТ для каждого пилота. Одна ЭЛТ представляет собой командный авиагоризонт, а другая – плановый навигационный прибор (
Плановый навигационный прибор.
Плановый навигационный прибор (ПНП) показывает курс, отклонение от заданного курса, пеленг радионавигационной станции и расстояние до этой станции. ПНП представляет собой комбинированный индикатор, в котором объединены функции четырех индикаторов – курсоуказателя, радиомагнитного индикатора, индикаторов пеленга и дальности. Электронный ПНП с встроенным индикатором карты дает цветное изображение карты с индикацией истинного местоположения самолета относительно аэропортов и наземных радионавигационных средств. Индикация направления полета, вычисления поворота и желательного пути полета предоставляют возможность судить о соотношении между истинным местоположением самолета и желаемым. Это позволяет пилоту быстро и точно корректировать путь полета. Пилот может также выводить на карту данные о преобладающих погодных условиях.

Указатель воздушной скорости.
При движении самолета в атмосфере встречный поток воздуха создает скоростной напор в трубке Пито, закрепленной на фюзеляже или на крыле. Воздушная скорость измеряется путем сравнения скоростного (динамического) напора со статическим давлением. Под действием разности динамического и статического давлений прогибается упругая мембрана, с которой связана стрелка, показывающая по шкале воздушную скорость в километрах в час. Указатель воздушной скорости показывает также эволютивную скорость, число Маха и максимальную эксплуатационную скорость. На центральной панели расположен резервный пневмоуказатель воздушной скорости.
Вариометр.
Вариометр необходим для поддержания постоянной скорости подъема или снижения. Как и высотомер, вариометр представляет собой, в сущности, барометр. Он указывает скорость изменения высоты, измеряя статическое давление. Имеются также электронные вариометры. Вертикальная скорость указывается в метрах в минуту.
Высотомер.
Высотомер определяет высоту над уровнем моря по зависимости атмосферного давления от высоты. Это, в сущности, барометр, проградуированный не в единицах давления, а в метрах. Данные высотомера могут представляться разными способами – с помощью стрелок, комбинаций счетчиков, барабанов и стрелок, посредством электронных приборов, получающих сигналы датчиков давления воздуха. См. также БАРОМЕТР.
НАВИГАЦИОННЫЕ СИСТЕМЫ И АВТОМАТЫ
На самолетах устанавливаются различные навигационные автоматы и системы, помогающие пилоту вести самолет по заданному маршруту и выполнять предпосадочное маневрирование. Некоторые такие системы полностью автономны; другие требуют радиосвязи с наземными средствами навигации.
Электронные навигационные системы.
Существует ряд различных электронных систем воздушной навигации. Всенаправленные радиомаяки – это наземные радиопередатчики с радиусом действия до 150 км. Они обычно определяют воздушные трассы, обеспечивают наведение при заходе на посадку и служат ориентирами при заходе на посадку по приборам. Направление на всенаправленный радиомаяк определяет автоматический бортовой радиопеленгатор, выходная информация которого отображается стрелкой указателя пеленга.
Основным международным средством радионавигации являются всенаправленные азимутальные радиомаяки УКВ-диапазона VOR; их радиус действия достигает 250 км. Такие радиомаяки используются для определения воздушной трассы и для предпосадочного маневрирования. Информация VOR отображается на ПНП и на индикаторах с вращающейся стрелкой.
Дальномерное оборудование (DME) определяет дальность прямой видимости в пределах около 370 км от наземного радиомаяка. Информация представляется в цифровой форме.
Для совместной работы с маяками VOR вместо ответчика DME обычно устанавливают наземное оборудование системы TACAN. Составная система VORTAC обеспечивает возможность определения азимута с помощью всенаправленного маяка VOR и дальности с помощью дальномерного канала TACAN.
Система посадки по приборам – это система радиомаяков, обеспечивающая точное наведение самолета при окончательном заходе на посадочную полосу. Курсовые посадочные радиомаяки (радиус действия около 2 км) выводят самолет на среднюю линию посадочной полосы; глиссадные радиомаяки дают радиолуч, направленный под углом около 3° к посадочной полосе. Посадочный курс и угол глиссады представляются на командном авиагоризонте и ПНП. Индексы, расположенные сбоку и внизу на командном авиагоризонте, показывают отклонения от угла глиссады и средней линии посадочной полосы. Система управления полетом представляет информацию системы посадки по приборам посредством перекрестья на командном авиагоризонте.
СВЧ-система обеспечения посадки – это точная система наведения при посадке, имеющая радиус действия не менее 37 км. Она может обеспечивать заход по ломаной траектории, по прямоугольной «коробочке» или по прямой (с курса), а также с увеличенным углом глиссады, заданным пилотом. Информация представляется так же, как и для системы посадки по приборам. См. также АЭРОПОРТ; ВОЗДУШНЫМ ДВИЖЕНИЕМ УПРАВЛЕНИЕ.
«Омега» и «Лоран» – радионавигационные системы, которые, используя сеть наземных радиомаяков, обеспечивают глобальную рабочую зону. Обе системы допускают полеты по любому маршруту, выбранному пилотом. «Лоран» применяется также при заходе на посадку без использования средств точного захода. Командный авиагоризонт, ПНП и другие приборы показывают местоположение самолета, маршрут и путевую скорость, а также курс, расстояние и расчетное время прибытия для выбранных путевых точек.
Инерциальные системы.
Инерциальная навигационная система и инерциальная система отсчета являются полностью автономными. Но обе системы могут использовать внешние средства навигации для коррекции местоположения. Первая из них определяет и регистрирует изменения направления и скорости с помощью гироскопов и акселерометров. С момента взлета самолета датчики реагируют на его движения, и их сигналы преобразуются в информацию о местоположении. Во второй вместо механических гироскопов используются кольцевые лазерные. Кольцевой лазерный гироскоп представляет собой треугольный кольцевой лазерный резонатор с лазерным лучом, разделенным на два луча, которые распространяются по замкнутой траектории в противоположных направлениях. Угловое смещение приводит к возникновению разности их частот, которая измеряется и регистрируется. (Система реагирует на изменения ускорения силы тяжести и на вращение Земли.) Навигационные данные поступают на ПНП, а данные положения в пространстве – на командный авиагоризонт. Кроме того, данные передаются на систему FMS (
Система обработки и индикации пилотажных данных (FMS).
Система FMS обеспечивает непрерывное представление траектории полета. Она вычисляет воздушные скорости, высоту, точки подъема и снижения, соответствующие наиболее экономному потреблению топлива. При этом система использует планы полета, хранящиеся в ее памяти, но позволяет также пилоту изменять их и вводить новые посредством компьютерного дисплея (FMC/CDU). Система FMS вырабатывает и выводит на дисплей летные, навигационные и режимные данные; она выдает также команды для автопилота и командного пилотажного прибора. В дополнение ко всему она обеспечивает непрерывную автоматическую навигацию с момента взлета до момента приземления. Данные системы FMS представляются на ПНП, командном авиагоризонте и компьютерном дисплее FMC/CDU.
ПРИБОРЫ КОНТРОЛЯ РАБОТЫ АВИАДВИГАТЕЛЕЙ
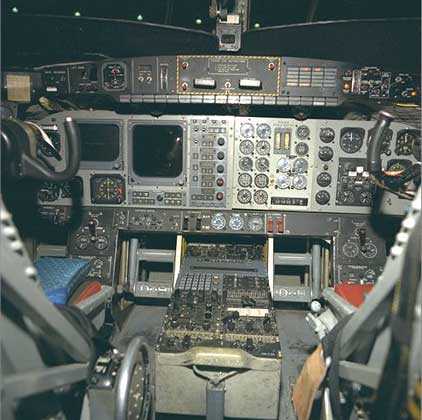
Индикаторы работы авиадвигателей сгруппированы в центре приборной доски. С их помощью пилот контролирует работу двигателей, а также (в режиме ручного управления полетом) изменяет их рабочие параметры.
Для контроля и управления гидравлической, электрической, топливной системами и системой поддержания нормальных рабочих условий необходимы многочисленные индикаторы и органы управления. Индикаторы и органы управления, размещаемые либо на панели бортинженера, либо на навесной панели, часто располагают на мнемосхеме, соответствующей расположению исполнительных органов. Индикаторы мнемосхем показывают положение шасси, закрылков и предкрылков. Может указываться также положение элеронов, стабилизаторов и интерцепторов.
СИГНАЛИЗАЦИОННЫЕ УСТРОЙСТВА
В случае нарушений в работе двигателей или систем, неправильного задания конфигурации или рабочего режима самолета вырабатываются предупредительные, уведомительные или рекомендательные сообщения для экипажа. Для этого предусмотрены визуальные, звуковые и тактильные средства сигнализации. Современные бортовые системы позволяют уменьшить число раздражающих тревожных сигналов. Приоритетность последних определяется по степени неотложности. На электронных дисплеях высвечиваются текстовые сообщения в порядке и с выделением, соответствующими степени их важности. Предупредительные сообщения требуют немедленных корректирующих действий. Уведомительные – требуют лишь немедленного ознакомления, а корректирующих действий – в последующем. Рекомендательные сообщения содержат информацию, важную для экипажа. Предупредительные и уведомительные сообщения делаются обычно и в визуальной, и в звуковой форме.
Системы предупредительной сигнализации предупреждают экипаж о нарушении нормальных условий эксплуатации самолета. Например, система предупреждения об угрозе срыва предупреждает экипаж о такой угрозе вибрацией обеих штурвальных колонок. Система предупреждения опасного сближения с землей дает речевые предупредительные сообщения. Система предупреждения о сдвиге ветра дает световой сигнал и речевое сообщение, когда на маршруте самолета встречается изменение скорости или направления ветра, способное вызвать резкое уменьшение воздушной скорости. Кроме того, на командном авиагоризонте высвечивается шкала тангажа, что позволяет пилоту быстрее определить оптимальный угол подъема для восстановления траектории.
ОСНОВНЫЕ ТЕНДЕНЦИИ
«Режим S» – предполагаемый канал обмена данными для службы управления воздушным движением – позволяет авиадиспетчерам передавать пилотам сообщения, выводимые на лобовое стекло самолета. Сигнализационная система предупреждения воздушных столкновений (TCAS) – это бортовая система, выдающая экипажу информацию о необходимых маневрах. Система TCAS информирует экипаж о других самолетах, появляющихся поблизости. Затем она выдает сообщение предупредительного приоритета с указанием маневров, необходимых для того, чтобы избежать столкновения.
Глобальная система местоопределения (GPS) – военная спутниковая система навигации, рабочая зона которой охватывает весь земной шар, – теперь доступна и гражданским пользователям. К концу тысячелетия системы «Лоран», «Омега», VOR/DME и VORTAC практически полностью вытеснены спутниковыми системами.
Монитор состояния (статуса) полета (FSM) – усовершенствованная комбинация существующих систем уведомления и предупреждения –помогает экипажу в нештатных летных ситуациях и при отказах систем. Монитор FSM собирает данные всех бортовых систем и выдает экипажу текстовые предписания для выполнения в аварийных ситуациях. Кроме того, он контролирует и оценивает эффективность принятых мер коррекции.
www.krugosvet.ru
3Министерство образования и науки российской федерации
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО
ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ «САМАРСКИЙ ГОСУДАРСТВЕННЫЙ АЭРОКОСМИЧЕСКИЙ УНИВЕРСИТЕТ
имени академика С.П. КОРОЛЕВА»
П.Г. Шабалов,
В.И. Соловьев,
Е.Ф. Галкин
Навигационные системы
САМАРА 2006
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
САМАРСКИЙ ГОСУДАРСТВЕННЫЙ АЭРОКОСМИЧЕСКИЙ УНИВЕРСИТЕТ
имени академика С. П. КОРОЛЕВА
П.Г. Шабалов, В.И. Соловьев, Е.Ф. Галкин
Навигационные системы
Учебное пособие
САМАРА 2006
УДК
С.П. Шабалов, В.И. Соловьев, Е.Ф. Галкин. Навигационные системы: Учеб. пособие. Самар. гос. аэрокосм. ун-т. Самара, 2006, 84 с.
В данном учебном пособии представлены сведения о навигационной системе базового самолета МиГ-29, рассмотрена общая характеристика, роль и место в системах электроснабжения летательных аппаратов, а также принцип действия и конструктивное исполнение данных систем. Основное внимание уделено рассмотрению вопросов теории построения навигационных систем, объясняющей принцип действия, рассмотрены основные характеристики и процессы физических явлений, возникающие при работе системы. В учебном пособии также изложены конструкция, основные технические данные, правила эксплуатации и взаимодействие с другими системами навигационной системы самолета МиГ-29.
Данное пособие предназначено для студентов, обучающихся на военной кафедре СГАУ. И предназначено для студентов ВУЗов, обучающихся по военно-учетным специальностям ВВС.
Печатается по решению редакционно-издательского совета Самарского государственного аэрокосмического университета имени академика С.П. Королева
Рецензент: Г.И. Леонович, М.Н. Ковалев
ISBN © Самарский государственный
аэрокосмический университет, 2006
Оглавление:
Условные обозначения……………………………………………………5
Предисловие ………………………………………………………………7
Введение……………………………………………………………………8
1.Навигационные системы (НС)
1.1. Задачи и методы навигации………………………………………..…11
1.2. Навигационные системы координат (СК)……………………..……12
1.3. Системы воздушно-доплеровского счисления пути…………..…..22
2. Инерциальные навигационные системы (ИНС)
2.1. ИНС — общие сведения, принципы построения…………………….24
2.2. Принцип действия и методические погрешности акселерометров……………………………………………………….27
2.3. Классификация, принципы построения и работы гиростабилизаторов…………………………………………………..35
3. Инерционная Курсовертикаль (ИКВ)
3.1. Система «ИКВ-1»: назначение, алгоритмы функционирования,
состав и режимы работы…………………..……….…………………39
3.2. Режим начальной выставки ИКВ-УВ и ТВ………………………….43
3.3. Рабочие режимы ИКВ………………………..……………………….50
4 Навигационные системы СН-29
4.1. Общие сведения о навигационном комплексе типа СН-29………..57
4.2. Информационный комплекс вертикали и курса ИК-ВК-80…………60
4.3. Режимы подготовки (выставки). Ускоренная выставка……………..64
5. Режимы работы ИК-ВК-80.
5.1. Нормальная выставка (НВ). Режим повторного запуска (РПЗ)……71
5.2. Рабочие режимы горизонтальных каналов…………………………..74
5.3. Рабочие режимы каналов курса…………………………………..….77
5.4. Особенности эксплуатации ИК-ВК-80…………………………..…..80
Список использованных источников……………………………………..84
Условные обозначения
АНУ — автоматическое навигационное устройство
АОр — азимут ориентира
БК — блок коррекции,
БУГ — блок усилителей гиродатчика
БЦВМ — бортовая цифровая вычислительная машина
ГБ — гироблоки
ГВК — гирофлексами
ГПК-гирополукомпас
ГСП — гиростабилизированная платформа
ДС — двигатель стабилизации
ЗК – задатчик курса
ИД — индукционный датчик магнитного курса
ИКВ — инерциальные курсовертикали
ИПМ — исходный пункт маршрута
КМ — коррекционный механизм
КПМ — конечный пункт маршрута
ЛА – летательный аппарат
ЛЗП — линии заданного пути
МК — магнитная коррекция
МС — место самолета
НОМ — начальный ортодромический меридиан
НПУО — путевой угол ортодромии
НРК — наружная (внешняя) рама крена
НС- навигационная система
ОЭ — ортодромический экватор
ОМ — ортодромический меридиан
П — пеленг цели
ПК — пульт контроля
ПНД — пульт ввода начальных данных
ПНК — пилотажно-навигационные комплексы
РСБН- радиосистема ближней навигации
РК – радиокомас
РПЗ — Режим повторного запуска
СВС – система воздушных сигналов
СК — системы координат
САУ – система автоматического управления
ТВ – точная выставка
УД — угол доворота
УВ — ускоренная выставка
Предисловие
Во время полета пилоту необходимо четко ориентироваться в пространстве для выполнения поставленной задачи. Для определения места самолета в пространстве необходима некая система, которая определяла бы положение самолета относительно земной поверхности, а также угловое положение ЛА в выбранной системе координат. Эти задачи в полном объеме решают различные типы НС.
НС тесно связана с другими системами и комплексами ЛА, и использует электрические сигналы, пропорциональные параметрам окружающей среды, полученные другими системами и датчиками(СВС, ДИСС, РСБН).
Без данной системы немыслимо управлять современными ЛА. И при помощи стараний разработчиков она органично вписана в электрооборудование воздушных судов.
Учебное пособие поможет разобраться с общим принципом построения НС и подробно изучить конкретные системы(ИКВ-1, ИКВ-УВ, СН-29, НК-ВК-90, ИК-ВК-80).
Данное учебное пособие разработано таким образом, чтобы стали понятны основные тенденции развития НС, с одной стороны, и подробно изучены системы, реально применяющиеся в настоящее время в рядах вооруженных сил РФ. В пособии собраны все необходимые сведения для подробного ознакомления с данной тематикой.
Введение
Полет самолета по заданному маршруту вне видимости Земли возможен только по приборам, которые могли бы показывать положение самолета относительно горизонта и определять его курс и координаты в системе координат, связанной с Землей. В этом случае очень важны такие понятия, как траектория и маршрут полёта.
Линию движения самолета в пространстве называют траекторией, а проекцию траектории на поверхность Земли — маршрутом полета.
Положение самолета относительно горизонта и его курс определяются приборами, которые в совокупности образуют единый пилотажно-навигационный комплекс.
Навигационные системы представляют собой централизованные устройства, объединяющие индукционные (магнитные), гироскопические, астрономические и радиотехнические средства измерения параметров полёта. В навигационных системах автоматизируется процесс коррекции ошибок отдельных компасных датчиков и снижается общий уровень ошибок до минимального значения; улучшаются динамические свойства курсовой системы в целом и облегчается анализ выходной информации. Они имеют повышенную помехозащищенность и обладают достаточной автономностью применения.
Целью авиационной навигации является вывод самолета в заданное время в заданную точку пространства. Отсюда можно сделать вывод, что навигация — наука о методах и средствах вождения подвижных объектов. Главной задачей навигации является определение координат местоположения объекта.
В настоящее время задачи навигации решают в основном позиционным методом и методом счисления пути.
Позиционный метод состоит в определении координат местоположения самолета из геометрических соотношений по измеренным расстояниям и углам взаимного расположения самолета и известных точек (ориентиров, радиомаяков, светил). На этом методе основаны способы астрономической, радиотехнической навигации, а также визуальная ориентировка.
Счисление пути заключается в вычислении траектории движения самолета по измерениям величины и направления его скорости и координатам начальной точки движения. Для измерения скорости движения самолета могут использоваться измерители воздушной скорости, доплеровские измерители скорости и инерциальные навигационные системы. Направление движения самолета определяется с помощью курсовых приборов. В зависимости от типа применяемых измерителей различают курсо-воздушные, курсо-доплеровские и инерциальные способы счисления пути.
В данном разделе нельзя не упомянуть, что одну из важнейших ролей в решении навигационной задачи играют гироскопические приборы. Положение самолета относительно горизонта и его курс определяются гироскопом с тремя степенями свободы. Направления оси симметрии такого гироскопа и осей его карданового подвеса выбирают в зависимости от назначения прибора. Так, в приборах, предназначенных для определения положения самолета относительно горизонта, ось симметрии гироскопа совмещают с вертикалью, а оси карданового подвеса устанавливают горизонтально.
Широкое применение трехстепенного гироскопа на самолете обусловлено его способностью мгновенно показывать изменения положения самолета в пространстве. Это свойство гироскопа основано на сохранении им своего положения в пространстве при поворотах самолета.
Трехстепенные гироскопы с коррекцией и без нее были одними из первых гироскопических приборов, нашедших широкое применение в авиационной практике. Другими гироскопическими приборами, также уже давно применявшимися на практике, являются двухстепенные гироскопы — указатели поворота для измерения угловой скорости вращения самолета по курсу.
Как трехстепенные, так и двухстепенные гироскопы сначала применялись на самолетах в качестве индикаторных приборов, затем с появлением автопилотов они стали широко применяться в них в качестве чувствительных элементов. Для выполнения этих функций гироскопы снабжаются датчиками, преобразующими угловые перемещения самолета и гироскопа в сигналы электрического тока или перепада давлений.
С развитием самолетов возникла необходимость в создании платформ, которые сохраняли бы неизменным свое положение в пространстве независимо от вращения самолета или ракеты, на которых они устанавливались. В практике наиболее пригодными для этих целей оказались платформы, стабилизированные гироскопами. Такие гиростабилизированные платформы, использующие, как правило, несколько гироскопов, получили в последнее время широкое распространение на самолетах.
Навигационные системы современных самолетов являются комплексными, т. е. они состоят из ряда взаимосвязанных подсистем, реализующих различные методы и способы навигации.
1. НАВИГАЦИОННЫЕ СИСТЕМЫ (НС)
1.1. Задачи и методы навигации
Различают общую и частную задачи навигации.
ОБЩЕЙ задачей навигации (задачей самолетовождения) является обеспечение перемещения ЛА в заданную точку, по заданной траектории, за определенное время и с необходимой точностью. Решение этой задачи осуществляется с помощью пилотажно-навигационных комплексов (ПНК).
ЧАСТНОЙ задачей навигации является вычисление текущих координат местоположения ЛА. Эта задача решается навигационными устройствами и системами, которые определяют место самолета (МС), то есть координаты проекции его центра масс на поверхность Земли.
Для определения места самолета используются следующие методы: 1)обзорно-сравнительный; 2)позиционный; 3)счисления пути.
1) Обзорно-сравнительный метод заключается в визуальном или автоматическом сравнении наблюдаемой местности или участка неба с географической или звездной картой. Простейшая реализация этого метода состоит в визуальных наблюдениях летчика (экипажа) за внекабинным пространством (особенно в режиме посадки) и экранами обзорных бортовых радиолокационных станций.
2) Позиционный метод заключается в вычислении координат ЛА из геометрических соотношений, когда исходной информацией являются дальности, азимуты (пеленги) или курсовые углы до точек на земной поверхности с известными координатами или высоты и азимуты светил, наблюдаемых с ЛА. Этот метод используется в ближней и дальней радионавигации, а также при применении астрономических средств.
3) Метод счисления пути заключается в интегрировании во времени ускорения или скорости движения центра масс ЛА.
Счисление пути осуществляется на основе воздушного (аэрометрического), доплеровского и инерциального способов навигационных измерений.
При этих методах используются только бортовые технические средства, поэтому они являются автономным, то есть независимыми от работы наземного оборудования.
В последнее время быстрыми темпами развиваются корреляционно-экстремальные навигационные системы, основанные на сопоставлении некоторого физического поля Земли в точке местоположения ЛА с соответствующей картой, хранящейся в памяти бортовой цифровой вычислительной машины (БЦВМ). В этих системах могут быть использованы практически все физические поля Земли: рельефы, магнитное, тепловое, гравитационное и др. Выбор поля обусловливается его изученностью и стабильностью. Путем сравнения в БЦВМ карты поля с информацией измерителя этого же поля отыскивается экстремум корреляционной функции, по которому определяется местоположение ЛА относительно принятой навигационной системы координат.
Корреляционно-экстремальные системы чаще всего применяются для коррекции других навигационных систем.
studfiles.net
Система навигации самолёта информирует пассажира о том, что полёт…
15 июля 2018
Математика
Студенческий
Система навигации самолёта информирует пассажира о том, что полёт проходит на высоте 31000 фунтов. Выразите высоту полёта в метрах. Считайте, что 1 фут равен 30,5 см.
Ответы
ОТВЕТ: 9455 м.
16 июля 2018
Рейтинг: 0.0
Ответ на картинке внизу страницы
16 июля 2018
Рейтинг: 0.0
klassgdz.ru
Как пилоты используют аэронавигацию для полета 2019

Аэронавигация осуществляется различными способами. Способ или система, которые пилот использует для навигации по сегодняшней системе воздушного пространства, будут зависеть от типа полета, который будет иметь место (VFR или IFR), какие навигационные системы установлены на самолете и какие навигационные системы доступны в определенной области.
Dead Reckoning and Pilotage
На самом простом уровне навигация осуществляется с помощью идей, известных как «мертвый расчет» и «лоцманская проводка».
Пилотирование — это термин, который относится к единственному использованию визуальных наземных ссылок. Пилот идентифицирует ориентиры, такие как реки, города, аэропорты и здания, а также навигаторы среди них. Проблема с лоцманской проводкой заключается в том, что часто ссылки нелегко видеть и не могут быть легко идентифицированы в условиях низкой видимости или если пилот немного отстает. Поэтому была введена идея мертвого расчёта.
Мертвый расчет предполагает использование визуальных контрольно-пропускных пунктов наряду с расчетами времени и расстояния. Пилот выбирает контрольные точки, которые легко видны с воздуха, а также идентифицируются на карте, а затем вычисляет время, которое потребуется для перехода от одной точки к другой, исходя из расчета расстояния, скорости и ветра. Летный компьютер помогает пилотам при вычислении вычислений времени и расстояния, и пилот обычно использует журнал планирования полета, чтобы отслеживать расчеты во время полета.
ru.routestofinance.com
10.2. Системы навигации используемые в пнк
На самолетах устанавливаются различные навигационные автоматы и системы, помогающие пилоту вести самолет по заданному маршруту и выполнять предпосадочное маневрирование. Некоторые системы полностью автономны; другие требуют радиосвязи с наземными средствами навигации.
Существует ряд различных электронных систем воздушной навигации. Всенаправленные радиомаяки – это наземные радиопередатчики с радиусом действия до 150 км. Они обычно определяют воздушные трассы, обеспечивают наведение при заходе на посадку и служат ориентирами при заходе на посадку по приборам. Направление на всенаправленный радиомаяк определяет автоматический бортовой радиопеленгатор, выходная информация которого отображается стрелкой указателя пеленга.
Основным международным средством радионавигации являются всенаправленные азимутальные радиомаяки УКВ-диапазона VOR; их радиус действия достигает 750 км. Такие радиомаяки используются для определения воздушной трассы и для предпосадочного маневрирования. Современные ЛА работают также с радиомаяками систем инструментальной посадки воздушных судов — ILS, СП-50. Информация VOR отображается на Плановый навигационный прибор (ПНП) и на индикаторах с вращающейся стрелкой.
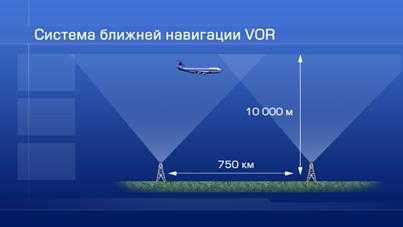
Рис. 10.2. Международная радиотехническая система ближней навигации VOR

Рис. 10.3. Система ILS обеспечивает заход на посадку и посадку самолетов
Аппаратура VIM-95 (рис10.4) предназначена для работы с радиомаяками системы ближней навигации — VOR и радиомаяками систем инструментальной посадки воздушных судов — ILS, СП-50. Выдает информацию об азимуте на радиомаяк VOR и отклонениях от линий курса и глиссады снижения при посадке по системам ILS и СП-50 как в цифровой, так и в аналоговой форме, а так же сигналы прохождения маркерных маяков.
Рис. 10.4 Приборный комплекс-VIM-95
В состав VIM-95 входят курсовой, глиссадный и маркерный приемники. Он принадлежит к новому поколению бортовой навигационно-посадочной аппаратуры. По сравнению с предшествующей отечественной моделью аппаратуры VOR&ILS (Курс-МП-70) объем и масса VIM-95 уменьшились в 3 раза. Аппаратура имеет разветвленный встроенный контроль, позволяющий произвести проверку приемника непосредственно на борту воздушного судна. Управляется цифровыми сигналами, как централизовано, так и от собственного пульта управления
Международная радиотехническая система ближней навигации DME обеспечивает определение наклонной дальности ЛА до радиомаяков DME, расположенных во всех регионах земного шара. Система может эксплуатироваться отдельно от системы VOR, обеспечивая одновременное определение наклонной дальности ЛА до нескольких радиомаяков DME.

Рис. 10.5. Международная радиотехническая система ближней навигации DME.
Рис. 10.6. Радиодальномер СДК-67
Основные комплексы, системы навигации DME: СД-67А,СДК-67А,СД-75М,ВНД — 94,DME/P-85.
Радиодальномер СДК-67А является бортовой частью дальномерного оборудования системы DМЕ (TAKAN).
Предназначен:
— для непрерывного измерения и индикации расстояния между воздушным судном и наземными радиомаяками DME/N, DME/P в режиме IA, ТАКАN в километрах или морских милях;
-.для измерения наклонной дальности до маяков DME/N, DME/P в режиме IA, ТАКАN;
— выдачи временного интервала в аппаратуру РСБН; выдачи сигналов опознавания звуковой частоты в самолетное переговорное устройство.
Для совместной работы с маяками VOR вместо ответчика DME обычно устанавливают наземное оборудование системы TACAN. Составная система VORTAC обеспечивает возможность определения азимута с помощью всенаправленного маяка VOR и дальности с помощью дальномерного канала TACAN.
Система посадки по приборам – это система радиомаяков, обеспечивающая точное наведение самолета при окончательном заходе на посадочную полосу. Курсовые посадочные радиомаяки (радиус действия около 2 км) выводят самолет на среднюю линию посадочной полосы; глиссадные радиомаяки дают радиолуч, направленный под углом около 3° к посадочной полосе. Посадочный курс и угол глиссады представляются на командном авиагоризонте и ПНП. Индексы, расположенные сбоку и внизу на командном авиагоризонте, показывают отклонения от угла глиссады и средней линии посадочной полосы. Система управления полетом представляет информацию системы посадки по приборам посредством перекрестья на командном авиагоризонте.
Российская радиотехническая система ближней навигации (РСБН) является основным средством ближней навигации военных и гражданских самолетов всех типов России и СНГ. Используется и военной авиацией ряда зарубежных стран.

Рис. 10.7 Радиотехническая система ближней навигации (РСБН)
Система обеспечивает определение азимута и наклонной дальности самолета относительно радиомаяков РСБН с большей точностью по сравнению с зарубежными системами VOR и DME. Российская радиотехническая система инструментальной посадки самолетов ПРМГ дециметрового диапазона радиоволн является основной системой посадки российских военных самолетов.
Бортовая аппаратура ближней навигации и посадки РСБН-85
РСБН-85 определяет и выдает навигационные параметры местоположения для: полета воздушного судна (ВС) по маршруту, привода в заданную точку и захода на посадку.
Бортовую аппаратуру ближней навигации и посадки РСБН-85 выгодно отличает ее универсальность:
—
Рис. 10.8. Комплекс РСБН-85
она пригодна для всех видов новых воздушных судов и для модернизации оборудования ЛА, находящихся в эксплуатации;— может входить в любой комплекс навигационной аппаратуры, как аналоговый, так и цифровой;
— может использоваться с собственным пультом управления и без него.
РСБН-85 обеспечивает лучшие технические характеристики, меньшее энергопотребление и существенно меньшие габариты и массу блока по сравнению с эксплуатируемыми на ЛА аналогами. Установлена и успешно эксплуатируется на самолетах и вертолетах различных ведомств.
СВЧ-система обеспечения посадки – это точная система наведения при посадке, имеющая радиус действия не менее 37 км. Она может обеспечивать заход по ломаной траектории, по прямоугольной «коробочке» или по прямой (с курса), а также с увеличенным углом глиссады, заданным пилотом. Информация представляется так же, как и для системы посадки по приборам.
Управление воздушным движением (УВД) – это система и процесс, обеспечивающие порядок и безопасность полетов в диспетчерском воздушном пространстве и обмен информацией между авиадиспетчерами и экипажами воздушных судов с использованием ЭВМ и радионавигационных средств. Управление воздушным движением (УВД) находится в компетенции государства.
Автоматическое зависимое наблюдение(АЗН) — метод наблюдения за ВС, в соответствии с которым ВС автоматически представляет по линиям передачи данных конкретному или любому потребителю (наземному или бортовому) информацию о своих координатах, параметрах движения и ближайших намерениях (следующем пункте маршрута и заданной высоте).

Рис. 10.9. Автоматическое зависимое наблюдение(АЗН)
Рис. 10.10 Комплекс АЗН-В(S)
АЗН является одной из составляющих концепции ICAO развития системы организации воздушного движения CNS/АТМ.
Система автоматического наблюдения на снове S-режима АЗН-В(S)
АЗН-В(S) обеспечивает службы УВД идентификационными данными и координатно-временными параметрами воздушного судна; предоставляет окружающим воздушным судам (ВС) информацию о своем местоположении для своевременного взаимного обнаружения и безопасного маневрирования в воздухе и на земле; делает возможным планирование безопасного собственного маршрута на основе полученной координатно-временной информации от окружающих ВС, данных наземного наблюдения (TIS-B) и бортовых координатно-временных датчиков (GNSS и др.).
Радионавигационные системы «Омега» и «Лоран», используя сеть наземных радиомаяков, обеспечивают глобальную рабочую зону. Обе системы допускают полеты по любому маршруту, выбранному пилотом. «Лоран» применяется также при заходе на посадку без использования средств точного захода.
Командные пилотажно-навигационные системы. Командные пилотажно-навигационные системы (ПНС) с помощью вычислительного устройства обеспечивают логическую и математическую обработку сигналов нескольких датчиков (систем) и формирование результирующего командного сигнала, выдаваемого на показывающий прибор (НКП, КПП, НПП, ПП). Командный авиагоризонт, ПНП и другие приборы показывают местоположение самолета, маршрут и путевую скорость, а также курс, расстояние и расчетное время прибытия для выбранных путевых точек. Техника пилотирования по таким приборам, называемым командными, заключается в том, что, отклоняя рукоятку управления пропорционально отклонению командных стрелок, держать эти стрелки вблизи центрального индекса в пределах кружка, окаймляющего индекс.
Основными типами ПНС являются: «Путь-4» («Путь-4М», «Путь-4МПА»), «Привод» («Привод-АН», «Привод-В, «Привод-С», «Привод-ЕК», «Привод-АНД» и др.).
Выполняемые функции: полет по маршруту, привод к аэродрому, полет на заданной высоте и по заданному курсу, пробивание облачности (для ПНС «Привод»), заход на посадку без автоматического (для ПНС типа «Путь») и с автоматическим захватом глиссады (для ПНС «Привод»), построение коробочки и др.
Датчики сигналов для ПНС: КС-6, ЦГВ-1, АГД-1, АРК-11, РСБН-2С. Совместно с ПНС работают: СП-50, маяки системы VOR/ILS, НИ-50БМ, АП-28, АП-15, НВУ, «Свод» и др.
Индикация параметров положения и движения ЛА на указателях ПНС. На комбинированных указателях типа КПП, НПП, ПП, НКП, ПКП обеспечивают индикацию крена g команды по крену dэ, тангажа n, команды по тангажу dв отклонения от глиссады x, курса y, заданного курса yа, курсового угла радиостанции gКУР, отклонения от заданной линии пути e, отклонения от заданного курса Dyз, пеленга радиостанции gМП, скольжения b и др.
Плановый навигационный прибор (ПНП) показывает курс, отклонение от заданного курса, пеленг радионавигационной станции и расстояние до этой станции. ПНП представляет собой комбинированный индикатор, в котором объединены функции четырех индикаторов – курсоуказателя, радиомагнитного индикатора, индикаторов пеленга и дальности. Электронный ПНП с встроенным индикатором карты дает цветное изображение карты с ндикацией истинного местоположения самолета относительно аэропортов и наземных радионавигационных средств. Индикация направления полета, вычисления поворота и желательного пути полета предоставляют возможность судить о соотношении между истинным местоположением самолета и желаемым. Это позволяет пилоту быстро и точно корректировать путь полета. Пилот может также выводить на карту данные о преобладающих погодных условиях.
Инерциальная навигационная система и инерциальная система отсчета являются полностью автономными комплексами Но обе системы могут использовать внешние средства навигации для коррекции местоположения. Первая из них определяет и регистрирует изменения направления и скорости с помощью гироскопов и акселерометров. С момента взлета самолета датчики реагируют на его движения, и их сигналы преобразуются в информацию о местоположении. Во второй ‒ вместо механических гироскопов используются кольцевые лазерные. Кольцевой лазерный гироскоп представляет собой треугольный кольцевой лазерный резонатор с лазерным лучом, разделенным на два луча, которые распространяются по замкнутой траектории в противоположных направлениях. Угловое смещение приводит к возникновению разности их частот, которая измеряется и регистрируется. (Система реагирует на изменения ускорения силы тяжести и на вращение Земли.) Навигационные данные поступают на ПНП, а данные положения в пространстве – на командный авиагоризонт. Кроме того, данные передаются на систему FMS.
Инерциальная система 802-М
Система предназначена для маневренных самолетов ВВС и вертолетов. Система обеспечивает информацию о следующих параметрах: географических координатах местоположения, составляющих путевой скорости, вертикальной скорости, углах крена и тангажа, стояночного и текущего истинного курса, гироскопического курса, гиромагнитного курса.
Технические характеристики:
Точность определения :
географические координаты, км/час курс истинный: 3,7
— стояночный, градусы 0,3
— текущий, градусы 0,15
курс гиромагнитный (от внешнего
датчика), градусы 0,3
курс гироскопический, градусы/час 0,1
крен, тангаж, градусы 0,3
Время непрерывной работы, час 8
Масса, кг. 28
Условия работы:
Диапазон рабочих темпеоатур, °С от — 60 до + 50
Линейное ускорение, м/сг 98
Угловые скорости, градусы/с 180
Высота полета, км 19,5
Система обработки и индикации пилотажных данных (FMS). Система FMS обеспечивает непрерывное представление траектории полета. Она вычисляет воздушные скорости, высоту, точки подъема и снижения, соответствующие наиболее экономному потреблению топлива. При этом система использует планы полета, хранящиеся в ее памяти, но позволяет также пилоту изменять их и вводить новые посредством компьютерного дисплея (FMC/CDU).
Система FMS вырабатывает и выводит на дисплей летные, навигационные и режимные данные; она выдает также команды для автопилота и командного пилотажного прибора. В дополнение ко всему она обеспечивает непрерывную автоматическую навигацию с момента взлета до момента приземления. Данные системы FMS представляются на ПНП, командном авиагоризонте и компьютерном дисплее FMC/CDU.
Существует сигнализационная система предупреждения воздушных столкновений (TCAS) – это бортовая система, выдающая экипажу информацию о необходимых маневрах. Система TCAS информирует экипаж о других самолетах, появляющихся поблизости. Она выдает сообщение предупредительного приоритета с указанием маневров, необходимых для того, чтобы избежать столкновения.
Глобальная система местоопределения (ГЛОНАСС, GPS) – военная спутниковая система навигации, рабочая зона которой охватывает весь земной шар, – теперь доступна и гражданским пользователям. К концу тысячелетия системы «Лоран», «Омега», VOR/DME и VORTAC были практически полностью вытеснены спутниковыми системами.
Монитор состояния (статуса) полета (FSM) – усовершенствованная комбинация существующих систем уведомления и предупреждения – помогает экипажу в нештатных летных ситуациях и при отказах систем. Монитор FSM собирает данные всех бортовых систем и выдает экипажу текстовые предписания для выполнения в аварийных ситуациях. Кроме того, он контролирует и оценивает эффективность принятых мер коррекции.
studfiles.net
Инновационная система навигации кораблей и самолетов от Швабе
 Холдинг “Швабе” Госкорпорации Ростех усовершенствовал работу зеемановского лазерного гироскопа, применяющегося в навигационных системах кораблей и самолетов, информирует пресс-служба оптического холдинга. “Новая запатентованная разработка холдинга на 15% повысит точность работы систем навигации воздушного или водного судна”, – говорится в сообщении. Отмечается, что изобретение предприятия научно-исследовательского института (НИИ) “Полюс” (входит в “Швабе”) повышает качество электронных блоков, оказывающих воздействие на точность работы данного прибора и навигационной системы в целом.
Холдинг “Швабе” Госкорпорации Ростех усовершенствовал работу зеемановского лазерного гироскопа, применяющегося в навигационных системах кораблей и самолетов, информирует пресс-служба оптического холдинга. “Новая запатентованная разработка холдинга на 15% повысит точность работы систем навигации воздушного или водного судна”, – говорится в сообщении. Отмечается, что изобретение предприятия научно-исследовательского института (НИИ) “Полюс” (входит в “Швабе”) повышает качество электронных блоков, оказывающих воздействие на точность работы данного прибора и навигационной системы в целом.
“Мы модернизировали работу лазерного гироскопа за счет внедрения в электронику лазерного гироскопа новых компонентов – синхронного детектора и синхронного модулятора. Данные технические средства позволяют на 15% снизить влияние разности интенсивностей встречных волн и, как результат, на 15% повысить точность работы лазерного гироскопа”, – приводятся в пресс-релизе слова генерального директора НИИ Евгения Кузнецова.

Воспользуйтесь нашими услугами
Запуск новой разработки НИИ в производственный процесс запланирован на март 2017 года, уточняется в сообщении.

Также “Швабе” разработал новое поколение сверхпрочного ситалла для астрономических и навигационных приборов.
“Ситалл-ЛГ может применяться в производстве приборов для астрономии, навигации, медицинских и научных исследований, товаров народного потребления”.
Воспользуйтесь нашими услугами
Справка:
Лазерный гироскоп — оптический прибор для измерения угловой скорости, обычно применяется в системах инерциальной навигации. Лазерные гироскопы используют эффект Саньяка — появление фазового сдвига встречных световых волн во вращающемся кольцевом интерферометре.
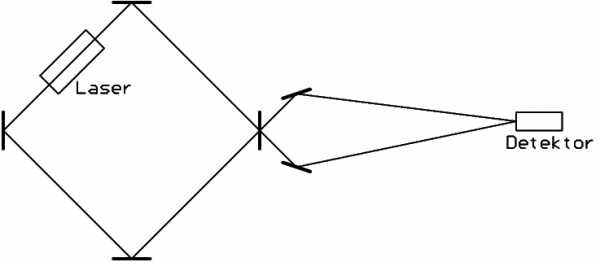
Схема лазерного гироскопа. Здесь луч лазера циркулирует с помощью зеркал и постоянно усиливается лазером (а точнее квантовым усилителем). Замкнутый контур имеет ответвление через полупрозрачное зеркало (или, например, через щель) в датчик на базе интерферометра.
Прибор сам по себе является лазером и состоит из активной среды и резонатора, при работе происходит генерация излучения в двух направлениях.Работа лазерного гироскопа основана на эффекте Саньяка, два луча генерируются в резонаторе лазерного гироскопа и, если прибор вращается, то происходит генерация волн разной частоты для разных направлений из-за различной длины резонатора для разных направлений обхода, вызванной вращением. Описать разность частот в гироскопе, вызванную вращением, можно с помощью формулы:
где A – площадь, охватываемая лучом, L – периметр резонатора, Ω – угловая скорость вращения гироскопа, λ – длина волны.
Резонатор лазерного гироскопа может быть достаточно сложным, но обычно это – кольцевой резонатор с тремя или четырьмя зеркалами, резонатор может быть выполнен как моноблочная конструкция, так и состоять из отдельных элементов. Часто резонатор выполняется в форме треугольника или квадрата. Размер гироскопа может быть от нескольких сантиметров до нескольких метров.
Два лазерных луча, генерируемые и усиливающиеся в полостях гироскопа, непрерывно циркулируют по резонатору в противоположных направлениях. В лазерном гироскопе создаётся и поддерживается стоячая волна, а её узлы и пучности в идеальном случае связаны с инерциальной системой отсчёта. Таким образом, положение узлов и пучностей не меняется если гироскоп не вращается (в плоскости кольцевого контура) относительно инерциальной системы отсчёта, а при повороте резонатора (корпуса гироскопа) фотоприёмники измеряют угол поворота, считая пробегающие по ним интерференционные полосы.
Чувствительность лазерного гироскопа пропорциональна площади поверхности, ограниченной лучами лазера.
Воспользуйтесь нашими услугами
Понравилась статья? Тогда поддержите нас, поделитесь с друзьями и заглядывайте по рекламным ссылкам!
integral-russia.ru
 Зональная навигация, или RNAV (Area Navigation) в последние годы успешно вытесняет традиционные методы навигации с использованием наземных радиосредств. Сегодня на авиационных частотах очень часто можно услышать команду диспетчера «CLEARED DIRECT TO», что означает «разрешаю полет прямо на», при этом точка пути, на которую разрешается полет, как правило, не маркирована наземными радиосредствами, а просто задана координатами. Такую команду возможно выполнить только с применением бортового оборудования RNAV. Зональная навигация широко применяется на всех этапах полета, включая самый ответственный — заход на посадку. В перспективе, с развитием спутниковых навигационных систем, зональная навигация полностью вытеснит традиционные методы навигации.
Зональная навигация, или RNAV (Area Navigation) в последние годы успешно вытесняет традиционные методы навигации с использованием наземных радиосредств. Сегодня на авиационных частотах очень часто можно услышать команду диспетчера «CLEARED DIRECT TO», что означает «разрешаю полет прямо на», при этом точка пути, на которую разрешается полет, как правило, не маркирована наземными радиосредствами, а просто задана координатами. Такую команду возможно выполнить только с применением бортового оборудования RNAV. Зональная навигация широко применяется на всех этапах полета, включая самый ответственный — заход на посадку. В перспективе, с развитием спутниковых навигационных систем, зональная навигация полностью вытеснит традиционные методы навигации.
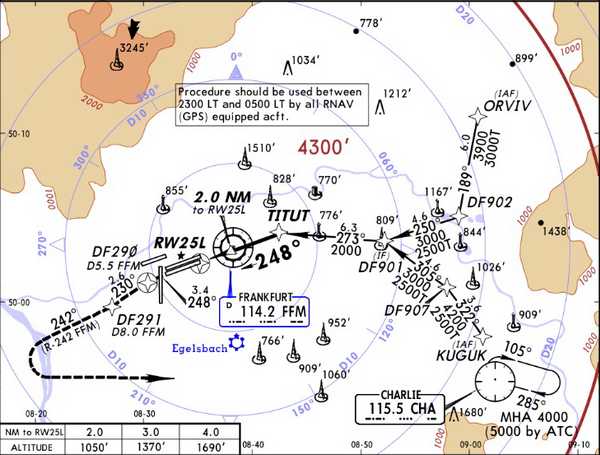
Схема захода на посадку RNAV в аэропорту Франкфурта.
Преимущества над традиционной навигацией.
Прежде всего необходимо определить понятие RNAV.
Зональная навигация (RNAV) – это метод навигации, позволяющий воздушным судам выполнять полет по любой желаемой траектории в пределах зоны действия радиомаячных навигационных средств или в пределах, определяемых возможностями автономных средств, или их комбинации (определение ИКАО).
В прежние дни маршрут полета должен был проходить строго через радионавигационные средства, другими словами, на каждом участке маршрута должно было обеспечиваться радионавигационное наведение. Очевидно, что при применении такого метода навигации, увеличивается длина маршрута, а значит и итоговая стоимость перевозки.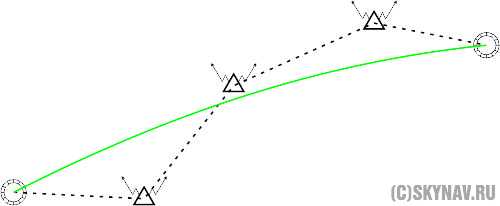
Маршрут полета, основанный на наземных радионавигационных средствах (РНС).
Возможность выполнять полет без привязки к РНС дает целый ряд преимуществ. В первую очередь это значительное уменьшение времени полета, т.е. прямая экономия на топливе и других расходах связанных с эксплуатацией воздушного судна. При выполнении полета с использованием оборудования RNAV не требуется широкой сети наземных радионавигационных средств, к слову, содержание одного радиомаяка VOR обходится около 100 тысяч долларов в год. Кроме того, применение RNAV позволяет эффективнее использовать воздушное пространство, тем самым увеличивая его пропускную способность.
Определение места воздушного судна в системах RNAV.
Основой любой бортовой системы RNAV является датчик, способный с достаточной точностью определять координаты воздушного судна (как правило, в системе координат WGS-84) и навигационная база данных (о ней речь пойдет дальше).
Первые системы RNAV, хоть и не являлись полноценными системами в их сегодняшнем понимании, работали только от РНС и позволяли выполнять полет вне трасс при условии нахождения в радиусе действия нескольких радиомаяков VOR/DME. На пульте управления системы устанавливались частоты радиомаяков, а маршрут задавался точками определенными радиалами и дальностью.
Длительное время широко применялись системы дальней навигации, в частности LORAN-C. В отсутствии спутниковых навигационных систем, других способов определения места воздушного судна при полете через океан не было. Системы дальней навигации, основанные на наземных радиостанциях (их еще называют гиперболическими), позволяли определять географические координаты воздушного судна с относительно высокой точностью (для LORAN-C около 500 метров). Дальность действия LORAN-Cсоставляла до 2500 километров.

Бортовое оборудование системы LORAN-C.
Как это ни странно, основным источником информации о местоположении в современных бортовых навигационных системах является не спутниковая навигационная система, а инерциальная навигационная система. Смысл такого решения прост. Инерциальная система хоть и имеет свойство накапливать погрешность, но у нее есть один неоспоримый плюс: она полностью автономна. К тому же, за счет применения лазерных гироскопов и акселерометров, современные IRS (Inertial Reference System) имеют довольно высокие показатели точности, уход составляет не более 1-2 морских миль за час полета.
Не стоит забывать, что система GPS контролируется министерством обороны США. Известны случаи, когда Пентагон исключал определенные регионы из зоны покрытия системы либо снижал точность определения координат. Однако, для того, чтобы IRS обеспечивала необходимую точность определения координат, ее необходимо периодически корректировать по более точным координатам, как правило, это GPS или наземные радиомаяки DME/DME. Маяки VOR/DME и DME/DME могут выступать самостоятельными датчиками координат для системы RNAV.

Принцип определения координат по двум дальномерным радиомаякам DME.
Второе местоположение исключается компьютером системы RNAV.
В перспективе планируется полностью отказаться от наземных радиосредств и перейти на GNSS (Global Navigation Satellite System), которая включает уже действующие системы GPS и ГЛОНАСС, в 2016 году планируется запуск европейской системы GALILEO. Одновременное использование нескольких независимых СНС позволит значительно улучшить точность и надежность навигации методом RNAV.
Бортовое оборудование RNAV.
Поскольку инерциальной навигационной системой оборудуются, как правило, только тяжелые воздушные суда, осуществляющие коммерческие перевозки, наиболее широкое развитие получили системы RNAV, в которых единственным датчиком координат является GPS. В этом случае приемник GPS должен иметь функцию RAIM.

Garmin GNS-430. Один из самых распространенных авиационных приемников GPS.
Устанавливается, как правило, на легкие воздушные суда.
Большинство современных самолетов коммерческой авиации оборудуются комплексной системой управления полетом. На самолетах разных производителей ее называют по-разному: FMC – flight management computer (Boeing), FMGS – Flight Management and Guidance System (Airbus). Именно через эту систему и ее пульт управления (СDU – control display unit) в числе прочего функционала реализуются возможности оборудования RNAV.

Навигационный дисплей и пульт управления FMC самолета Boeing-737NG.
Оборудование RNAV обеспечивает ряд характерных для данного метода навигации функций:
- индикация координат воздушного судна и информации об их точности
- непрерывная индикация навигационных параметров, включая линейное боковое уклонение (ЛБУ), путевую скорость, расчетное время полета и расстояние до активной точки пути, фактический путевой угол, пеленг на активную точку пути
- индикация информации о ЛБУ на CDI (Course Deviation Indicator), выдача сигналов в автопилот
- функция «DIRECT TO» (выбор любой точки пути из навигационной базы данных и полет на нее из текущего местоположения)
- функция создания последовательности точек пути (плана полета)
- осуществление полета параллельно линии заданного пути (OFFSET) с определенным ЛБУ
Точки пути. Базы данных.
Маршрут зональной навигации строится на основе точек пути (WPT–Waypoint), точка пути задается координатами в системе координат WGS-84. Существует два вида точек пути: FLY-BY и FLY-OVER, их пролет осуществляется с упреждением или без него. Все маршрутные точки имеют тип FLY-BY, точки FLY-OVER применяются в основном на аэродромных схемах, например точки ухода на второй круг, точки определяющие зону ожидания.
Обозначение и правила пролета точек FLY-BY и FLY-OVER.
Навигационная база данных систем RNAV в обязательном порядке обновляется в соответствии с циклами AIRAC каждые 28 дней. Формат, в котором кодируется навигационная информация, зависит от производителя и модели конкретного оборудования. Наиболее широкое распространение получил формат данных ARINC-424.
В базе данных каждой точке задается координатами, также ей присваивается признак fly-by или fly-over, а для каждого участка маршрута указываются требования к его выполнению в соответствии с концепцией PATH TERMINATOR, в соответствии с которой участки обозначаются двумя буквами, где первая означает метод выполнения полета на участке, а вторая окончание участка. Например TF – track to fix, или CA – course to altitude. Всего существует 22 варианта типовых участков, которые позволяет закодировать ARINC-424.
Примеры некоторых типовых участков в соответствии с форматом данных ARINC-424.
Точность навигации RNAV.
К оборудованию RNAV предъявляются определенные требования по точностным характеристикам и надежности. Эти требования сформулированы в концепции PBN (Performance Based Navigation), требования по точности выражаются в морских милях допустимого бокового уклонения, например навигационная спецификация RNP-10 (RNP — Required Navigation Performance) означает, что с вероятностью 0,95 полет должен проходить в пределах +-10 морских миль от оси трассы.
skynav.ru