
Радиолокационная станция — Википедия
Материал из Википедии — свободной энциклопедии
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 27 июня 2018; проверки требуют 3 правки. Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 27 июня 2018; проверки требуют 3 правки. Радар с параболической антеннойРадиолокационная станция (РЛС), рада́р (англ. radar от radio detection and ranging — радиообнаружение и измерение дальности) — система для обнаружения воздушных, морских и наземных объектов, а также для определения их дальности, скорости и геометрических параметров. Использует метод радиолокации, основанный на излучении радиоволн и регистрации их отражений от объектов. Английский термин появился в 1941 году как звуковая аббревиатура (англ. RADAR), впоследствии перейдя в разряд самостоятельного слова[1][2][3].
Современный радар на основеПринцип работы импульсной рлс
Принцип
работы импульсной РЛС можно уяснить,
рассмотрев «Упрощенную структурную
схему импульсной РЛС (рис. 3.1, слайд 20, 25)
и графики, поясняющие работу импульсного
радиолокатора (рис. 3.2, слайд 21, 26).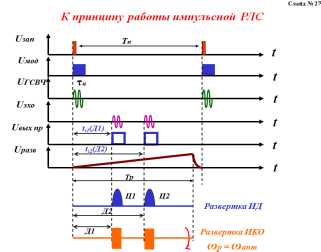
Работу импульсной РЛС лучше всего начать рассматривать с блока синхронизации (блока запуска) станции. Этот блок задает «ритм» работы станции: он задает частоту повторения зондирующих сигналов, синхронизирует работу индикаторного устройства с работой передатчика станции. Синхронизатор вырабатывает кратковременные остроконечные импульсы Изап с определенной частотой повторения Тп. Конструктивно синхронизатор может быть выполнен в виде отдельного блока или представлять единое целое с модулятором станции.
Модулятор управляет работой генератора СВЧ, включает и выключает его. Модулятор запускается импульсами синхронизатора и формирует мощные прямоугольные импульсы необходимой амплитуды Uм и длительности τи. Генератор СВЧ включается в работу только при наличии импульсов модулятора. Частота включения генератора СВЧ, а, следовательно, и частота повторения зондирующих импульсов определяется частотой импульсов синхронизатора Тп. Продолжительность работы генератора СВЧ при каждом его включении (то есть длительность зондирующего импульса) зависит от длительности формирующего в модуляторе импульса τи. Длительность импульса модулятора
Под действием напряжения модулятора генератор СВЧ формирует мощные радиоимпульсы Uген, длительность и форма которых определяется длительностью и формой импульсов модулятора. Колебания высокой частоты, то есть зондирующие импульсы от генератора СВЧ, поступают через антенный переключатель в антенну. Частота колебаний радиоимпульсов определяется параметрами генератора СВЧ.
Антенный переключатель (АП) обеспечивает возможность работы передатчика и приемника на одну общую антенну. На время генерации зондирующего импульса (мкс) он подключает антенну к выходу передатчика и блокирует вход приемника, а на нее остальное время (время паузы – сотни, тысячи мкс) подключает антенну к входу приемника и отключает ее от передатчика. В импульсный РЛС в качестве антенных переключателей применяются автоматические быстродействующие переключатели.
Антенна преобразует колебания СВЧ в электромагнитную энергию (радиоволны) и фокусирует ее в узкий пучок. Отраженные от цели сигналы принимаются антенной, проходят через антенный переключатель и поступают на вход приемника Uс, где они селектируются, усиливаются, детектируются и через аппаратуру защиты от помех подаются на индикаторные устройства.
Аппаратура защиты от помех включается только при наличии в зоне действия РЛС пассивных и активных помех. Подробно эта аппаратура будет изучаться в теме 7.
Индикаторное устройство является оконечным устройством РЛС и служит для отображения и съема радиолокационной информации. Электрическая схема и конструкция индикаторных устройств определяется практическим назначением станции и могут быть весьма различными. Например, для РЛС обнаружения с помощью индикаторных устройств должна воспроизводиться воздушная обстановка и определяться координаты целей Д и β. Эти индикаторы называются индикаторами кругового обзора (ИКО). В РЛС измерения высоты полета цели (высотомерах) используются индикаторы высоты. Индикаторы дальности измеряют только дальность до цели и используются для контроля.
Для точного определения дальности необходимо измерять интервал времени tз (десятки и сотни мкс) с высокой точностью, то есть требуются приборы с весьма малой инерционностью. Поэтому в индикаторах дальности в качестве измерительных приборов используются электронно-лучевые трубки (ЭЛТ).
Примечание. Принцип измерения дальности был изучен в занятии 1, поэтому при изучении этого вопроса основное внимание уделить формированию развертки на ИКО.
Сущность измерения дальности (время запаздывания tз) с помощью ЭЛТ можно пояснить на примере использования линейной развертки в трубке с электростатическим управлением электронным лучом.
При линейной развертке в ЭЛТ электронный луч под действием напряжения развертки Uр периодически перемещается с постоянной скоростью по прямой слева направо (рис. 1.7,слайд 9, 12). Напряжение развертки вырабатывается специальным генератором развертки, который запускается тем же импульсом синхронизатора, что и модулятор передатчика. Поэтому движение луча по экрану начинается каждый раз в момент посылки зондирующего импульса.
При использовании амплитудной отметки цели отраженный сигнал, поступающий с выхода приемника, вызывает отклонение луча в перпендикулярном направлении. Таким образом, отраженный сигнал можно видеть на экране трубки. Чем дальше находится цель, тем больше времени проходит до момента появления отраженного импульса и дальше вправо успевает переместиться луч вдоль линии развертки. Очевидно, каждой точке линии развертки соответствует определенный момент прихода отраженного сигнала и, следовательно, определенное значение дальности.
В РЛС, работающих в режиме кругового обзора, используются индикаторы кругового обзора (ИКО) и ЭЛТ с электромагнитным отклонением луча и яркостной отметкой. Антенна РЛС с узконаправленным лучом (ДН) перемещается механизмом вращения антенны в горизонтальной плоскости и «просматривает» окружающее пространство (рис. 3.3, слайд,
На ИКО линия развертки дальности вращается по азимуту синхронно с антенной, а начало движения электронного луча от центра трубки в радиальном направлении совпадает с моментом излучения зондирующего импульса. Синхронное вращение развертки на ИКО с антенной РЛС осуществляется при помощи силового синхронного привода (ССП). Ответные сигналы высвечиваются на экране индикатора в виде яркостной отметки.
ИКО позволяет одновременно определять дальность Д и азимут β цели. Для удобства отсчета на экране ИКО электронным способом наносятся масштабные отметки дальности, имеющие вид окружностей и масштабные отметки азимута в виде ярких радиальных линий (рис. 3.3, слайд, 8, 27).
Примечание. Используя телевизионную установку и карточку ТВ предложить студентам определить координаты целей. Указать масштаб индикатора: отметки дальности следуют через 10 км, отметки азимута – через 10 градусов.
В Ы В О Д
(слайд 28)
Определение дальности до объекта при импульсном методе сводится к измерению времени запаздывания tз отраженного сигнала относительно зондирующего импульса. Момент излучения зондирующего импульса берется за начало отсчета времени распространения радиоволн.
Достоинства импульсных РЛС:
удобство визуального наблюдения одновременно всех целей, облучаемых антенной в виде отметок на экране индикаторов;
поочередная работа передатчика и приемника позволяет использовать одну общую антенну для передачи и приема.
Второй учебный вопрос.
Основные показатели импульсного метода
Основными показателями импульсного метода являются (слайд 29):
— однозначно определяемая максимальная дальность, Д;
разрешающая способность по дальности, δД;
минимальная определяемая дальность, Дmin.
Рассмотрим эти показатели.
Однозначно определяемая максимальная дальность
Максимальная дальность действия РЛС определяется основной формулой радиолокации и зависит от параметров РЛС.
Однозначность определения дальности до объекта зависит от периода следования зондирующих импульсов Тп. Далее этот вопрос изложить следующим образом.
Максимальная дальность действия РЛС равна 300 км. Определить время задержки до цели, находящейся на этой дальности
Период повторения зондирующих импульсов выбран равным 1000 мкс. Определить дальность до цели, время задержки до которой равно Тп
В воздушном пространстве находятся две цели: цель № 1 на дальности 100 км и цель № 2 на дальности 200 км. Как будут выглядеть отметки от этих целей на индикаторе РЛС (рис. 3.4, слайд 22, 30).
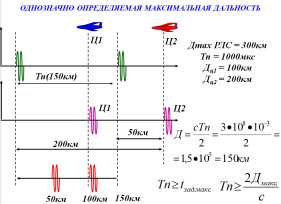
При зондировании пространства импульсами с периодом повторения 1000 мкс отметка от цели № 1 будет высвечиваться на дальности 50 км, так как после дальности 150 км начнется новый период развертки и дальняя цель даст отметку в начале шкалы (на дистанции 50 км). Отсчитанная дальность не соответствует реальной.
Как исключить неоднозначность в определении дальности?
Для однозначного определения дальности необходимо период повторения зондирующих импульсов выбирать в соответствии с заданной максимальной дальностью действия РЛС, то есть
.
Для заданной дальности 300 км период повторения зондирующих импульсов должен быть больше 2000 мкс или частота повторения должна быть меньше 500 Гц.
Кроме того, максимально определяемая дальность зависит от ширины ДНА, скорости вращения антенны и необходимого числа импульсов, отраженных от цели за один оборот антенны.
Разрешающей способностью по дальности (δД) называется то минимальное расстояние между двумя целями, находящимися на одном азимуте и угле места, при котором отраженные от них сигналы наблюдаются на экране индикатора еще раздельно (рис. 3.5, слайд 23, 31, 32).
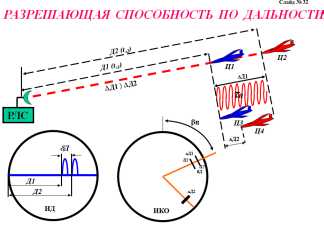
При заданной длительности зондирующего импульса τи и расстоянии между целями ∆Д1 цели № 1 и № 2 облучаются раздельно. При той же длительности импульса, но при расстоянии между целями ∆Д2 цели № 3 и № 4 облучаются одновременно. Следовательно, в первом случае на экране ИКО будут видны раздельно, а во втором – слитно. Отсюда вытекает, что для раздельного приема импульсных сигналов необходимо, чтобы интервал времени между моментами их приема был больше длительности импульса τи (∆t > τи)
Минимальная разность (Д2 – Д1), при которой цели видны на экране раздельно, по определению есть разрешающая способность по дальности δД, следовательно
Помимо длительности импульса τи на разрешающую способность станции по дальности оказывает влияние разрешающая способность индикатора, определяемая масштабом развертки и минимальным диаметром светящегося пятна на экране ЭЛТ (dп ≈ 1 мм). Чем крупнее масштаб развертки дальности и лучше фокусировка луча ЭЛТ, тем лучше разрешающая способность индикатора.
В общем случае разрешающая способность РЛС по дальности равна
где δДи – разрешающая способность индикатора.
Чем меньше δД , тем лучше разрешающая способность. Обычно разрешающая способность РЛС по дальности имеет величину δД = (0,5…5) км.
В отличие от разрешающей способности по дальности разрешающая способность по угловым координатам (по азимуту δβ и углу места δε) не зависит от метода радиолокации и определяется шириной диаграммы направленности антенны в соответствующей плоскости, которую принято отсчитывать по уровню половинной мощности.
Разрешающая способность РЛС по азимуту δβо равна:
δβо = φ0,5р о + δβио,
где φ0,5р о – ширина диаграммы направленности по половинной мощности в горизонтальной плоскости;
δβио — разрешающая способность по азимуту индикаторной аппаратуры.
Высокие разрешающие способности РЛС позволяют раздельно наблюдать и определять координаты близко расположенных целей.
Минимальная определяемая дальность – это наименьшее расстояние, на котором станция еще может обнаруживать цель. Иногда пространства вокруг станции, в котором цели не обнаруживаются, называют «мертвой» зоной (слайд 33).
Использование в импульсной РЛС одной антенны для передачи зондирующих импульсов и приема отраженных сигналов требует отключения приемника на время излучения зондирующего импульса τu. Поэтому отраженные сигналы, приходящие к станции в момент, когда ее приемник не подключен к антенне, не будут приняты и зарегистрированы на индикаторах. Продолжительность времени, в течение которого приемник не может принимать отраженные сигналы, определяется длительностью зондирующего импульса τu и временем, необходимым для переключения антенны с передачи на прием после воздействия на него зондирующего импульса передатчика tв.
Зная это время, значение минимальной дальности Дmin импульсной РЛС можно определить по формуле
где τu — длительность зондирующего импульса РЛС;
tв — время включения приемника после окончания зондирующего импульса передатчика (единицы – мкс).
Например. При τu = 10мкс Дmin = 1500 м
при τu = 1 мкс Дmin = 150 м.
Следует иметь ввиду, что к увеличению радиуса «мертвой» зоны Дmin приводит наличие на экране индикатора отраженный от местных предметов и ограниченность пределов поворота антенны по углу места.
В Ы В О Д
Импульсный метод радиолокации эффективен при измерении дальностей объектов, находящихся на больших расстояниях.
Третий учебный вопрос
Метод непрерывного излучения
Наряду с использованием импульсного метода радиолокации можно осуществить с помощью установок с непрерывным излучением энергии. При непрерывном методе излучения представляется возможность посылать большую энергию в направлении на цель.
Наряду с преимуществом энергетического порядка метод непрерывного излучения по ряду показателей уступает импульсному методу. В зависимости от того, какой параметр отраженного сигнала служат основой для измерения дальности до цели, при непрерывном методе радиолокации различают:
Возможны также комбинированные методы радиолокации, в частности, импульсно-фазовый и импульсно-частотный.
При фазовом методе радиолокации о расстоянии до цели до цели судят по разности фаз излучаемых и принимаемых отраженных колебаний. Первые фазометрические методы измерения расстояния были предложены и разработаны академиками Л.И.Мандельштамом и Н.Д.Папалекси. Эти методы нашли применение в длинноволновых авиационных радионавигационных системах большого радиуса действия.
При частотном методе радиолокации о расстоянии до цели судят по частоте биений между прямым и отраженным сигналами.
Примечание. Изучение этих методов студенты проводят самостоятельно. Литература: Слуцкий В.З. Импульсная техника и основы радиолокации. С. 227-236.
В Ы В О Д
Определение дальности до объекта при импульсном методе сводится к изменению времени запаздывания tзап отраженного сигнала относительно зондирующего импульса.
Для однозначности определения дальности до объекта необходимо, чтобы tзап.мах ≤ Тп.
Разрешающая способность по дальности δД тем лучше, чем меньше длительность зондирующего импульса τu.
studfiles.net
«Радиолокация»
Государственное образовательное учреждение
Гимназия № 1505
РЕФЕРАТ
на тему: «Радиолокация»
реферат подготовил:
Дрейманис Петр Янисович
консультант:
Ветюков Дмитрий Алексеевич
Москва 2009 год.
Содержание:
1.Что такое радиолокация (Введение) ………3
1.1Принципдействия…………..……………………3-4
2. Радиолокационная станция……………………4
2.1 Принцип действия РЛС……………………………..5
2.2 Принцип действия Первичной РЛС…………..5-6
2.3 Принцип действия Вторичной РЛС…………..6-7
73. Применение РЛ………………………………..…7
3.1 Военное применение……………………………7-8
3.2 Невоенное применение…………………………8
4.Технология СТЕСЛС и связь ее с РЛ (РЛС)……………………………………………………8
5. Используемая литература……………………..9
1. Что такое радиолокация (в дальнейшем РЛ)?
Радиолокация — область науки и техники, объединяющая методы и средства обнаружения, измерения координат, а также определение свойств и характеристик различных объектов, основанных на использовании радиоволн.
Выделяют два вида радиолокации:
· Пассивная радиолокация основана на приёме собственного излучения объекта
· При активной радиолокации радар излучает свой собственный зондирующий импульс и принимает его, отраженным от цели.
Активная радиолокация бывает двух видов:
· С активным ответом — на объекте предполагается наличие ответчика (радиопередатчика), который излучает радиоволны в ответ на принятый сигнал. Активный ответ применяется для опознавания объектов, а также для получения от них дополнительной информации (например, количество топлива, тип объекта и многое другое).
· С пассивным ответом — запросный сигнал отражается от объекта и воспринимается в пункте приёма как ответный.
1.1 Принцип действия:
Радиолокация основана на следующих физических явлениях:
· Радиоволны рассеиваются, на встретившихся, на пути их распространения: объектов с другими электрическими свойствами, отличными от свойств среды распространения. При этом отражённая волна, так же, как и собственно, излучение цели, позволяет обнаружить цель.
· Частота принятого сигнала получает дополнительный сдвиг относительно частоты излучаемых колебаний при перемещении точек приёма и излучения, что позволяет измерять радиальные скорости движения цели относительно РЛС.
2. Радиолокационная станция
Радиолокационная станция (РЛС) или радар — система для обнаружения воздушных, морских и наземных объектов, а также для определения их дальности. В основном используется метод, основанный на излучении радиоволн и регистрации их отражений от объектов.
РЛС можно классифицировать так:
По предназначению:
· РЛС обнаружения;
· РЛС управления и слежения;
· Панорамные РЛС;
· РЛС бокового обзора;
· Метеорологические РЛС.
По характеру носителя:
· Наземные РЛС
· Морские РЛС
· Бортовые РЛС
По типу действия
· Первичные
· Вторичные
По сфере применения:
· Военные
· Гражданские
2.1 Принцип действия РЛС
Система действия действий такова: большая антенна вращается на 360 градусов и посылает радиоволны, между которыми угол равен 1 градус, и дальность действий этих волн 100 км, тем самым, отсекая квадрат 2х2 километра; таких волн антенна посылает и принимает 360х90, так как по окружности 360 и по вертикали 90. Если искомый объект находиться в отсекаемом квадрате, то вычисляется его скорость и примерное местоположение его в определенное время и туда посылается луч, который гораздо тоньше предыдущего и служит для захвата цели, в то время как предыдущий служит для обнаружения цели
2.2 Устройство Первичной РЛС
В основе строения Первичной РЛС лежат: приемник (устройство для приёма электромагнитных волн, с последующим преобразованием содержащейся в них информации к виду, в котором она могла бы быть использована.), антенна (устройство для излучения и приема радиоволн ), передатчик (техническое устройство для передачи сигналов в участке электромагнитных волн с помощью радиоволн).
1. Передающее устройство является источником электромагнитного сигнала высокой мощности. В зависимости от конструкции, передатчик работает либо в импульсном режиме, формируя повторяющиеся короткие мощные электромагнитные импульсы, либо излучает непрерывный электромагнитный сигнал.
2. Антенна выполняет фокусировку сигнала приёмника и формирование диаграммы, а также приём отражённого от цели сигнала и передачу этого сигнала в приёмник. В зависимости от реализации приём отражённого сигнала может осуществляться либо той же самой антенной, либо другой, которая иногда может располагаться на значительном расстоянии от передающего устройства.
3. Приёмное устройство выполняет усиление и обработку принятого сигнала. В самом простом случае результирующий сигнал подаётся на экран, который показывает изображение, синхронизированное с движением антенны.
Импульсные РЛС
Современные радары сопровождения построены как импульсные радары. Импульсный радар передаёт только в течение очень краткого времени короткий импульс, обычно приблизительно микросекунда в продолжительности, после чего он слушает эхо, в то время как импульс распространяется. Следующий импульс можно послать только через некоторое время, а именно после того как импульс придёт обратно, это зависит от дальности обнаружения радара (данным мощностью передатчика, усилением антенны и чувствительностью приёмника). Промежуток времени между импульсами называют интервалом повторения импульса , обратная к нему величина — важный параметр, который называют частотой повторения импульса . Радары низкой частоты дальнего обзора, обычно имеют интервал повторения в несколько сотен импульсов в секунду (или Герц [Гц]). Частота повторения импульсов является одним из отличительных признаков, по которым возможно дистанционное определение модели РЛС.
2.3 Устройство Вторичной РЛС
Принцип действия вторичного радиолокатора несколько отличается, от принципа Первичной радиолокации. В основе устройства Вторичной РЛС лежат компоненты: передатчик, антенна, приёмник, сигнальный процессор (специализированный микропроцессор, предназначенный для цифровой обработки сигналов в реальном масштабе времени), индикатор и самолётный ответчик с антенной (бортовое приёмопередающее устройство летательных аппаратов, предназначенное для автоматической выдачи информационных посылок по запросному сигналу РЛС.).
Передатчик . Служит для излучения импульсов запроса в антенну на частоте 1030 МГц
Антенна . Служит для излучения и приёма отражённого сигнала. Для вторичной РЛС характерно то, что антенна излучает на частоте 1030МГц, и принимает на частоте 1090 МГц.
Приёмник . Служит для приёма импульсов на частоте 1090 МГц
Сигнальный процессор . Служит для обработки принятых сигналов
Индикатор. Служит для индикации обработанной информации
Самолётный ответчик с антенной. Служит для передачи импульсного радиосигнала, содержащего дополнительную информацию, обратно в сторону РЛС при получении радиосигнала запроса.
3. Применение РЛ
3.1 Военное применение
Одним из первых важных применений радиолокации были поиск и дальнее обнаружение в военных целях. Обратимся к истории: перед второй мировой войной Великобритания построила не очень совершенную, но довольно эффективную сеть радиолокационных станций дальнего обнаружения для защиты от внезапных воздушных налетов со стороны Ла-Манша. В наши же дни более совершенные радиолокационные сети защищают Россию и Северную Америку от внезапного нападения авиации или ракет. Корабли и самолеты также оснащаются радиолокаторами. Таким образом, стало возможным наведение истребителей на вражеские бомбардировщики с наземных радиолокаторов слежения или с корабельных радиолокаторов перехвата; можно также использовать бортовые самолетные радиолокаторы для обнаружения, слежения и уничтожения техники противника. Бортовые радиолокаторы важны для поиска, осуществляемого над сушей или морем, и оказания помощи в навигации или при слепом бомбометании.
Ракеты с радиолокационным наведением оснащаются для выполнения боевых задач специальными автономными устройствами. Для распознавания местности на самонаводящейся ракете имеется бортовой радиолокатор, который сканирует земную поверхность и соответствующим образом корректирует траекторию полета. Радиолокатор, расположенный поблизости от противоракетной установки, может непрерывно отслеживать полет межконтинентальной ракеты. За последние годы в обычные методы и средства радиолокации было внесено много нового – появилась, в частности, система для одновременного слежения за многими целями, находящимися на разных высотах и азимутах; кроме того, разработан способ усиления сигналов радиолокатора без увеличения фонового шума.
3.2 Невоенные применения .
Океанские суда используют радиолокационные системы для навигации. На промысловых траулерах радиолокатор находит применение для обнаружения косяков рыбы.
На самолетах радиолокаторы используют для решения ряда задач, в том числе для определения высоты полета относительно земли. В аэропортах один радиолокатор служит для управления воздушным движением, а другой – радиолокатор управления заходом на посадку – помогает пилотам посадить самолет в условиях плохой видимости.
4. Технология СТЕЛС и связь ее с РЛ (РЛС).
СТЕЛС — технология снижения заметности. Поверхность самолёта собирают из нескольких тысяч плоских треугольников специального волнотталкивающего материала, следовательно:
mirznanii.com
6. Судовая рлс. Принцип работы, разрешающая способность, факторы, влияющие на работу и точность рлс.
Радиолокацией называется обнаружение, определение координат и параметров движения различных объектов (целей), отражающих или излучающих радиоволны. Комплекс радиоэлектронных устройств, выполняющих эту задачу, называется радиолокационной станцией (РЛС) или радиолокатором.
РЛ-объектом или целью может быть любое физическое тело, электрические свойства которого отличаются от окружающей среды. Электромагнитная энергия сигналов, излучаемая передающей антенной, распространяясь в заданном направлении, отражается от того или иного объекта, расположенного на пути распространения радиоволн, и принимается приёмником. С выхода приёмника усиленные сигналы поступают в индикатор, где преобразуются в форму, удобную для получения информации о принятых сигналах.
Рлс с активным ответом (на объекте радиолокационный ответчик – приёмопередатчик) позволяет опознать цель по кодированным ответным сигналам. В зависимости от структуры зондирующих сигналов различают 2 метода РЛ-обнаружения: непрерывного излучения колебаний и импульсный метод. Импульсная РЛС периодически излучает кратковременные импульсы колебаний СВЧ, а в промежутках принимает отражённые от объектов импульсные сигналы, запаздывающие на время .
Разрешающая способность РЛС характеризует возможность раздельного обнаружения и определения координат нескольких целей, находящихся на определённом расстоянии друг от друга. Разрешающая способность по дальности численно равна минимальному расстоянию между двумя раздельно обнаруживаемыми объектами, расположенными в одном направлении. Раздельное обнаружение сигналов от этих объектов возможно при условии, что отражение от объекта 1 закончится ранее, чем поступит сигнал от объекта 2.
Поскольку
отражение от 1 длится в течение τи,
а сигнал от 2 запаздывает на время ,
то условием раздельного приёма сигналов
будетΔt>τи или d>ΔD,
где D
– разрешающее расстояние. Значение D
– предельное. Чем меньше D
– тем выше РСД. Из-за конечных размеров
электронного пятна реальная РСД будет
хуже. Dо с учётом ЭЛТ ΔDо = ΔD
+ Dинд.
ΔDинд = dп*Мр (диаметр пятна/масштаб шкалы).
,
то условием раздельного приёма сигналов
будетΔt>τи или d>ΔD,
где D
– разрешающее расстояние. Значение D
– предельное. Чем меньше D
– тем выше РСД. Из-за конечных размеров
электронного пятна реальная РСД будет
хуже. Dо с учётом ЭЛТ ΔDо = ΔD
+ Dинд.
ΔDинд = dп*Мр (диаметр пятна/масштаб шкалы). ;.
;.
На крупномасштабных шкалах разрешающая способность РЛС по дальности приближается к потенциальной; на мелкомасштабной РСД уменьшается и будет зависеть главным образом от dэ. В обоих случаях на dп влияет качество фокусировки луча на ЭЛТ.
Разрешающая способность по направления (азимуту) оценивается минимальным значением угла α между направлениями на 2 равноудалённых объекта 1 и 2, при котором отражённые сигналы от этих объектов будут приниматься раздельно. α — потенциально разрешающий угол. Чем меньше α, тем выше РСН. α практически равен ширине диаграммы направленности антенны в горизонтальной плоскости α = α гор. Реальная разрешающая способность по направлению будет заметна хуже из-за влияния ЭЛТ индикатора. α о = α + α инд. α инд – равен угловым размерам диаметра пятна:..
Следовательно по мере приближения отметки цели к началу развёртки РСН ухудшается.
Основное уравнение радиолокации:
 ,
Pпр – мощность принимаемых отражённых
сигналов.
,
Pпр – мощность принимаемых отражённых
сигналов.
Следовательно Dmax зависит от импульсной мощности передатчика, чувствительности приёмника, направленности антенны (GA), ЭПО объекта (Sэ).
Водная
поверхность оказывает влияние на работу
РЛС из-за отражения электро-магнитной
энергии от подстилающей поверхности,
а также вследствие сферичности Земли,
ограничивающей дальность РЛ-обнаружения.
Сигналы РЛС достигают объекта и отражаются
обратно двумя путями: прямым путём и
путём отражения от водной поверхности.
Суммарное поле объекта оказывается
неравномерным и в пределах диаграммы
направленности антенны в вертикальной
плоскости ности лепестковый характер.
Число лепестков n
зависит от высоты hантенны и длины волны  .
.
Влияние атмосферы выражается в следующем: из-за атмосферной рефракции радиоволны отклоняются от прямолинейного распространения; поглощается и рассеивается энергия радиоволн в сантиметровом и миллиметровом диапазоне.
Атмосферная рефракция, т. е. преломление радиоволн в нижних слоях атмосферы возникает вследствие того, что давление и температура воздуха медленно убывает с высотой. Это в свою очередь уменьшает диэлектрическую проницаемость воздуха и вызывает увеличение скорости распространения радиоволн с ростом высоты. Траектории радиолучей искривляются в направлении земной поверхности и дальнейшее действие РЛС повышается. При резком падении температуры может возникнуть субрефракция – искривление радиолучей вверх.
Затухание радиоволн, вызванное дождём, туманом, снегом, происходит по двум причинам. Во-первых, капли вода в атмосфере – несовершенный диэлектрик для сантиметровых волн и поэтому возбуждаемый в каплях ток СВЧ создаёт тепловые потери энергии. Во-вторых, при значительных размерах водяных капель имеет место отражение и рассеяние радиоволн. Затухание зависит также от плоскости завесы, формы частичек, температуры (чем больше воды в тумане, тем хуже видимость и меньше дальность действия РЛС). Дожди вызывают заметное ослабление дальности действия РЛС. Отражение энергии в сторону РЛС, вызываемое дождём, часто бывает значительным – мерцающее свечение на экране. Дождевые облака – светлые пятна на экране. Град и снег по сравнению с дождём вызывает меньшее поглощение энергии.
studfiles.net
Принцип работы импульсной РЛС — КиберПедия
Принцип работы импульсной РЛС можно уяснить, рассмотрев «Упрощенную структурную схему импульсной РЛС (рис. 3.1, слайд 20, 25) и графики, поясняющие работу импульсного радиолокатора (рис. 3.2, слайд 21, 26). 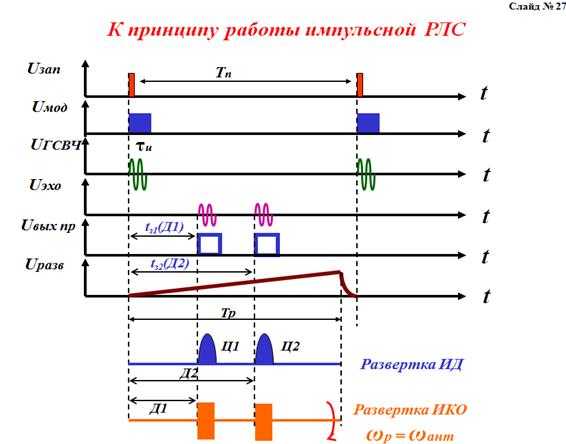
Работу импульсной РЛС лучше всего начать рассматривать с блока синхронизации (блока запуска) станции. Этот блок задает «ритм» работы станции: он задает частоту повторения зондирующих сигналов, синхронизирует работу индикаторного устройства с работой передатчика станции. Синхронизатор вырабатывает кратковременные остроконечные импульсы Изап с определенной частотой повторения Тп. Конструктивно синхронизатор может быть выполнен в виде отдельного блока или представлять единое целое с модулятором станции.
Модулятор управляет работой генератора СВЧ, включает и выключает его. Модулятор запускается импульсами синхронизатора и формирует мощные прямоугольные импульсы необходимой амплитуды Uм и длительности τи. Генератор СВЧ включается в работу только при наличии импульсов модулятора. Частота включения генератора СВЧ, а, следовательно, и частота повторения зондирующих импульсов определяется частотой импульсов синхронизатора Тп. Продолжительность работы генератора СВЧ при каждом его включении (то есть длительность зондирующего импульса) зависит от длительности формирующего в модуляторе импульса τи. Длительность импульса модулятора τи обычно составляет единицы микросекунд, а паузы между ними – сотни и тысячи микросекунды.
Под действием напряжения модулятора генератор СВЧ формирует мощные радиоимпульсы Uген, длительность и форма которых определяется длительностью и формой импульсов модулятора. Колебания высокой частоты, то есть зондирующие импульсы от генератора СВЧ, поступают через антенный переключатель в антенну. Частота колебаний радиоимпульсов определяется параметрами генератора СВЧ.
Антенный переключатель (АП) обеспечивает возможность работы передатчика и приемника на одну общую антенну. На время генерации зондирующего импульса (мкс) он подключает антенну к выходу передатчика и блокирует вход приемника, а на нее остальное время (время паузы – сотни, тысячи мкс) подключает антенну к входу приемника и отключает ее от передатчика. В импульсный РЛС в качестве антенных переключателей применяются автоматические быстродействующие переключатели.
Антенна преобразует колебания СВЧ в электромагнитную энергию (радиоволны) и фокусирует ее в узкий пучок. Отраженные от цели сигналы принимаются антенной, проходят через антенный переключатель и поступают на вход приемника Uс, где они селектируются, усиливаются, детектируются и через аппаратуру защиты от помех подаются на индикаторные устройства.
Аппаратура защиты от помех включается только при наличии в зоне действия РЛС пассивных и активных помех. Подробно эта аппаратура будет изучаться в теме 7.
Индикаторное устройство является оконечным устройством РЛС и служит для отображения и съема радиолокационной информации. Электрическая схема и конструкция индикаторных устройств определяется практическим назначением станции и могут быть весьма различными. Например, для РЛС обнаружения с помощью индикаторных устройств должна воспроизводиться воздушная обстановка и определяться координаты целей Д и β. Эти индикаторы называются индикаторами кругового обзора (ИКО). В РЛС измерения высоты полета цели (высотомерах) используются индикаторы высоты. Индикаторы дальности измеряют только дальность до цели и используются для контроля.
Для точного определения дальности необходимо измерять интервал времени tз (десятки и сотни мкс) с высокой точностью, то есть требуются приборы с весьма малой инерционностью. Поэтому в индикаторах дальности в качестве измерительных приборов используются электронно-лучевые трубки (ЭЛТ).
Примечание. Принцип измерения дальности был изучен в занятии 1, поэтому при изучении этого вопроса основное внимание уделить формированию развертки на ИКО.
Сущность измерения дальности (время запаздывания tз) с помощью ЭЛТ можно пояснить на примере использования линейной развертки в трубке с электростатическим управлением электронным лучом.
При линейной развертке в ЭЛТ электронный луч под действием напряжения развертки Uр периодически перемещается с постоянной скоростью по прямой слева направо (рис. 1.7,слайд 9, 12). Напряжение развертки вырабатывается специальным генератором развертки, который запускается тем же импульсом синхронизатора, что и модулятор передатчика. Поэтому движение луча по экрану начинается каждый раз в момент посылки зондирующего импульса.
При использовании амплитудной отметки цели отраженный сигнал, поступающий с выхода приемника, вызывает отклонение луча в перпендикулярном направлении. Таким образом, отраженный сигнал можно видеть на экране трубки. Чем дальше находится цель, тем больше времени проходит до момента появления отраженного импульса и дальше вправо успевает переместиться луч вдоль линии развертки. Очевидно, каждой точке линии развертки соответствует определенный момент прихода отраженного сигнала и, следовательно, определенное значение дальности.
В РЛС, работающих в режиме кругового обзора, используются индикаторы кругового обзора (ИКО) и ЭЛТ с электромагнитным отклонением луча и яркостной отметкой. Антенна РЛС с узконаправленным лучом (ДН) перемещается механизмом вращения антенны в горизонтальной плоскости и «просматривает» окружающее пространство (рис. 3.3, слайд,
На ИКО линия развертки дальности вращается по азимуту синхронно с антенной, а начало движения электронного луча от центра трубки в радиальном направлении совпадает с моментом излучения зондирующего импульса. Синхронное вращение развертки на ИКО с антенной РЛС осуществляется при помощи силового синхронного привода (ССП). Ответные сигналы высвечиваются на экране индикатора в виде яркостной отметки.
ИКО позволяет одновременно определять дальность Д и азимут β цели. Для удобства отсчета на экране ИКО электронным способом наносятся масштабные отметки дальности, имеющие вид окружностей и масштабные отметки азимута в виде ярких радиальных линий (рис. 3.3, слайд, 8, 27).

Примечание. Используя телевизионную установку и карточку ТВ предложить студентам определить координаты целей. Указать масштаб индикатора: отметки дальности следуют через 10 км, отметки азимута – через 10 градусов.
В Ы В О Д
(слайд 28)
1. Определение дальности до объекта при импульсном методе сводится к измерению времени запаздывания tзотраженного сигнала относительно зондирующего импульса. Момент излучения зондирующего импульса берется за начало отсчета времени распространения радиоволн.
2. Достоинства импульсных РЛС:
— удобство визуального наблюдения одновременно всех целей, облучаемых антенной в виде отметок на экране индикаторов;
— поочередная работа передатчика и приемника позволяет использовать одну общую антенну для передачи и приема.
Второй учебный вопрос.
Основные показатели импульсного метода
Основными показателями импульсного метода являются (слайд 29):
— однозначно определяемая максимальная дальность, Д;
— разрешающая способность по дальности, δД;
— минимальная определяемая дальность, Дmin.
Рассмотрим эти показатели.
cyberpedia.su
Принцип работы, технико-эксплуатационные характеристики судовой РЛС.
⇐ ПредыдущаяСтр 18 из 18
В основе работы судовой РЛС лежит явление отражения электромагнитного импульса. Передающее устройство радиолокационной станции производит мощные высокочастотные радиоимпульсы, которые узким лучом распространяются по направлению излучаемой антенны. Если радиоимпульс встречает на своем пути припятствие (судно, берег), то он отражается и возвращается в виде эхо-сигнала на приемник антенны. Пеленг или курсовой угол объекта, от которого отразился радиоимпульс, определяется направлением антенны. Расстояние до объекта рассчитывается временем, которое прошло с момента посыла до возвращения радиоимпульса. Антенна вращается и посылает импульсы по изменяющемуся направлению. Отраженные сигналы приемник преобразует и передает их на дисплей, в результате на экране появляется картинка с святящимися пятнами (суда, маяки) или волнистой линией (береговая полоса). Святящаяся точка в центре дисплея – судно, на котором и установлена радиолокационная станция. Расстояния до обнаруженных объектов определяется по светящимся кольцам на экране дисплея морского радара.
Технико-эксплуатационные требования к судовым РЛС
Радиолокационная станция (РЛС) должна обеспечивать индикацию относительного положения судов, других надводных объектов, буев, береговой черты и навигационных знаков так, чтобы способствовать навигации и предупреждению столкновений.
При нормальных условиях распространения, когда антенна РЛС расположена на высоте 15 м над уровнем моря, при отсутствии помех от моря РЛС должна обеспечивать четкую индикацию:
Береговой черты -при высоте берега до 60 м на расстоянии 20 миль
при высоте берега до 6 м на расстоянии 7 миль
Надводных объектов — судов валовой вместимостью 5000 т на расстоянии 7 миль независимо от ракурса, небольшого судна длиной 10 м на расстоянии 3 мили.
объектов, аналогичных навигационному бую, имеющих эффективную поверхность рассеивания приблизительно 10 кв.м на расстоянии 2 мили.
Технико-эксплуатационные характеристики.
Имеется два приемо-передатчика РЛС, работающие на длине волны 3 и 10 см.
Шкалы дальности:
1.5, 3, 6, 12 и 24 мили и одна шкала с номиналом более 0.5 и менее 0.8 мили либо
1, 2, 4, 8, 16 и 32 мили.
Разрешающая способность.
3.7.1. Индикатор должен обеспечивать на шкале дальности 2 мили или менее раздельное отображение двух одинаковых целей малого размера на расстояниях, равных 50 — 100 % от номинала используемой шкалы дальности и находящихся на одном направлении, если расстояние между целями не менее 50 м.
3.7.2. Индикатор должен обеспечивать раздельное отображение двух одинаковых целей малого размера, находящихся на одном расстоянии между 50 и 100 % от номинала шкалы < 1.5 > или < 2 > мили и их угловом положении, различающемся 2.5°.
Частота вращения антенны — не менее 12 об/мин.
Порядок включения и настройки РЛС. Подстройка изображения и контроль исправной работы.
Включение станции.
— Выключатель напряжения бортовой сети устанавливают в положение «Вкл» (запускается агрегат питания)
На индикаторе:
— Выключатель «РЛС – откл.» устанавливают в положение РЛС
— Тумблер «Антенна – откл.» устанавливают в положение Антенна.
— Включают оперативную кнопку П – 3 (при этом должны осветится шкальный механизм и поясняющие надписи).
— Через 1,5 ÷ 2,5 мин. на экране ЭЛТ должна появится вращающая развёртка, отметка курса, метки дальности и линия визира направления.
— Через 4 минуты должна появится отметка зондирующего импульса и отметки объектов в зоне обзора РЛС.
— С помощью соответствующих регуляторов, выбирают оптимальную яркость ВН; ВД; МД; и положение «Волны».
— Приёмопередатчик включается с помощью кнопочного переключателя. (6)
— Ориентация изображения относительно истинного меридиана (север) или относительно диаметральной плоскости судна (курс) в режиме относительного движения осуществляется переключателем 30, установкой его в положение «север» или «курс». Этим же переключателем, установкой его в положение «север
— ИД» обеспечивается режим истинного движения в масштабе шкал 1; 2; 4; 8 миль.
— Центр развёртки смещается в выбранную точку потенциометрами (33)
— Начало (центр) развёртки возвращается в центр ЭЛТ кнопкой 31 и 32
— Данные скорости своего судна могут вводится вручную (35)
— Поправка на снос за течение вводится потенциометром (35)
-Для устранения ложных отметок из-за сверхрефакции предусмотрено изменение частоты зондирующих импульсов (24)
— Ручкой резистора «подсвет панели» (1) регулируется яркость индикации: «сброс в центр»; «ложные сигналы»; «миль»; «градусы».
— Ручкой резистора «подсвет шкал» регулируется яркость индикации «шкала — интервал». -Цифровая индикация измеряемого до цели расстояния и индикация направления осуществляется на цифровых табло ЦТ – 3 и ЦТ – 4 (3; 5)
— Контроль работоспособности РЛС осуществляется встроенной системой, обеспечивающей контроль общей работоспособности и поиск неисправностей (16; 17; 18; 19;)
— Убеждаются в возможности: управления визирами дальности ВД и направления ВН, а также выключения отметки курса и изменения масштаба, путём переключения шкал дальности.
— Проверяют: совмещение начала развёртки с центром экрана (по двум взаимно перпендикулярным положениям визира направления на шкале 4 мили). Работоспособность схемы ориентации изображения (отключают гирокомпас, переключатель «курс – север – север ИД» устанавливают поочерёдно в положении «курс» и «север» убеждаясь, что отметка курса, при этом, изменяет своё положение).
После чего, устанавливают тумблер в положение «гирокомпас» и убеждается в соответствии положения линии курса показаниям репитера ГК.
— Проверяют смещение центра вращения развёртки в режиме ОД (рукоятку «сброс в центр» устанавливают в выключенное положение, рукояткой «смещение цента» плавно перемещают центр развёртки в лево и вправо на 2 / 3 радиуса ЭЛТ, всё это проделывают на 1; 2; 4; 8 мильных шкалах дальности при ориентации поочерёдно по «курсу» и «северу»).
— Кнопкой «сброс в центр» снова совмещаю центр развёртки с центром «экрана ЭЛТ».
— Проверяют индикатор на работу в режиме ИД для чего: устанавливают переключатель в режим «север — ИД» шкалу дальности на 1 милю, отключают лаг и гирокомпас, ручку «учёт сноса» в нулевые положение, вручную устанавливают произвольное значение скорости, с помощью кнопки «сброс в центр» убеждаются в том, что начало развёртки на экране перемещается по курсу с установленной скоростью.
Когда перемещение достигнет величины 2/3 радиуса ЭЛТ, центр развёртки должен автоматически возвратится в центр экрана. Возврат начала развёртки в исходную точку должен обеспечивается, также, вручную нажатием кнопки «сброс».
— Ручками «учёт сноса» вводят произвольное значение поправок по курсу и скорости, и убеждаются, что при этом изменяются параметры перемещения начала развёртки на экране ЭЛТ.
— Переключатель «курс – север – север ИД» устанавливают в положение «курс» или «север». При этом начало развёртки должно переместится в центр экрана и должен включится режим ОД. Тоже самое должно произойти при установке шкал дальности на значения 16; 32; 64 мили.
— Проверяют ручное смещение начала развёртки в режиме ИД: выключают кнопку «сброс в центр», регуляторы «смещение центра» устанавливают в положение, обеспечивающее смещение начала развёртки на величину меньше 2/3 радиуса ЭЛТ, кнопку «сброс» нажимают, и убеждаются, что центр развёртки переместился в выбранную точку, и начал перемещаться в заданном направлении. Сместившись на 2/3 радиуса экрана, центр развёртки автоматически возвращаются в выбранную точку. Контроль работоспособности станции осуществляется встроенной системой, обеспечивающей контроль и поиск неисправностей.
Система состоит из элементов, входящих отдельными узлами в приборы и блока станции. Работоспособность прибора П – 3 контролируется с помощью расположенного в нём блока НК – 3 который проверяет исправность источников питания и функциональных блоков и узлов.
Контроль работоспособности прибора И, поиск неисправного источника питания или функционального блока производится с помощью встроенного блока контроля, расположенного на панели управления прибора И.
ВЫКЛЮЧЕНИЕ СТАНЦИИ ПРОИЗВОДИТСЯ: Снятием питания тумблером «РЛС – откл.» Отключением напряжения бортовой сети (кнопка «стоп» пускателя) Отключением напряжения от элементов связи с лагом и гирокомпасом.
Рекомендуемые страницы:
lektsia.com
Радиолокационная станция: как развивалась новая система безопасности в России
Современные войны отличаются своей стремительностью и быстротечностью. Нередко победителями в боевых столкновениях выходят те, кто первыми смог обнаружить потенциальные угрозы и соответственно на них реагировал. Уже восьмой десяток лет для разведки и распознавания неприятеля на море и на суше, а также в воздушном пространстве используются радиолокационные методы.

Они основаны на излучении радиоволн с регистрацией их отражений от самых разнообразных объектов. Установки, которые посылают и принимают такие сигналы – современные радиолокационные станции или радары. Понятие «радар» происходит от английской аббревиатуры – RADAR. Оно появилось в 1941 году и давно вошло в языки мира.
Появление радаров стало знаковым событием. В современном мире практически не обойтись без радиолокационных станций. Без них не обходится авиация, мореплавание, гидрометцентр, ДПС, и пр. Более того радиолокационный комплекс широко используется в космических технологиях и в навигационных комплексах.
РЛС на военной службе
Все же больше всего радары приглянулись военным. Тем более, что эти технологии первоначально создавались для военного применения и практически реализовались перед Второй мировой войной. Все крупнейшие государства активно применяли РЛС для выявления кораблей и самолетов неприятеля. Причем их использование решало исход многих битв.
На сегодняшний день новые радиолокационные станции применяются в весьма широком спектре военных задач. Это и слежение за межконтинентальными баллистическими ракетами и артиллерийская разведка. Все самолеты, вертолеты, военные корабли обладают своими РЛС. Радары – это вообще основа систем ПВО.

Как работают радиолокаторы
Локация – это определение местопребывания чего-нибудь. Таким образом, радиолокация – это обнаружение предметов или объектов в пространстве с помощью радиоволн, которые излучаются и принимаются радиолокатором или РЛС. Принцип действия первичных или пассивных радаров основан на передаче в пространство радиоволн, отражаемых от объектов и возвращаемых к ним в виде отраженных сигналов. После их анализа, радары обнаруживают объекты в определенных точках пространства, их основные характеристики в виде скорости, высоты и размера. Все радары являются сложными радиотехническими устройствами из множества элементов.
Современный радиолокационный комплекс
Любые радары состоят из трех основных элементов:
- Передатчиков сигналов;
- Антенн;
- Приемников.
Из всех радиолокационных станций имеется особенное подразделение по двум большим группам:
- Импульсные;
- Непрерывного действия.
Передатчики импульсных РЛС излучают электромагнитные волны на протяжении коротких промежутков времени (долей секунд). Следующие сигналы посылаются лишь тогда, как первые импульсы вернутся назад и попадут в приемники. Частоты повторения импульсов являются также важнейшими характеристиками. Так низкочастотными радиолокаторами посылается не одна сотня импульсов в течение минуты.
Антенны импульсных радаров работают как приемники-передатчики. Как только ушли сигналы, передатчики отключаются на время и включаются приемники. Вслед за их приемом происходят обратные процессы.

Импульсные радары обладают своими недостатками и преимуществами. Они могут определять дальности одновременно нескольких целей. Такие радары могут иметь по одной антенне, а их индикаторы весьма простые.
Однако излучаемые сигналы должны обладать большой мощностью. Импульсная схема имеется у всех современных радаров сопровождения. Импульсные радиолокационные станции в качестве источников сигналов обычно пользуются магнетронами или лампами бегущих волн.
Импульсные радарные системы
Антенны радаров фокусируют электромагнитные сигналы и направляют их, а также улавливают отраженные импульсы и передают его в приемники. В некоторых радиолокаторах прием-передача сигналов могут производиться с помощью разных антенн, находящихся одна от другой на больших расстояниях. Антенны радаров могут производить излучение электромагнитных волн по кругу или действовать в определенных секторах.
Лучи радаров могут быть направлены спирально или обладать формами конусов. При необходимости радары могут отслеживать движущиеся цели, и все время направлять на них антенны, используя специальные системы. Приемники занимаются обработкой полученных данных и передачей их на экраны операторов.

Одним из основных недостатков в работе импульсных радаров являются помехи, идущие от недвижимых объектов, от земной поверхности, гор, холмов. Так, бортовые импульсные радары в процессе их функционирования в самолетах будут принимать затенения от сигналов, отраженных земной поверхностью. Наземные или судовые радиолокационные комплексы выявляют эти проблемы в процессе обнаружения целей, которые летят на малых высотах. Для устранения таких помех пользуются эффектом Доплера.
Радары непрерывного действия
Радары непрерывного действия функционируют постоянным излучением электромагнитных волн и пользуются эффектом Доплера. Его принцип в том, что частоты электромагнитных волн, отраженные от объектов, приближающихся к источникам сигналов, будут выше, чем от удаляющихся объектов. При этом частоты излучаемых импульсов остаются неизменными. Такими радиолокаторами не фиксируются неподвижные объекты, их приемники улавливают только волны с частотами выше или ниже излучаемых.
Главный недостаток радаров непрерывного действия – это их неспособность определять расстояния до объектов. Однако при их работе не возникают помехи от неподвижных объектов между радарами и целями, либо за ними. Также у доплеровских радаров сравнительно простое устройство, которому для функционирования хватит и сигналов с малой мощностью. Кроме того, современные радиолокационные станции непрерывного излучения обладают возможностью определять расстояния до объектов. Для этого применяются изменения частот радаров в процессе их действия.

Известно еще и о так называемых вторичных радиолокаторах, используемых в авиации для опознавания самолетов. В таких радиолокационных комплексах имеются еще и самолетные ответчики. В ходе облучения воздушных судов электромагнитными сигналами ответчики выдают дополнительные данные, такие как высота, маршрут, номер борта, а также государственная принадлежность.
Разновидности радиолокационных станций
Радары могут разделяться длиной и частотой волн, на которых они действуют. В частности, когда исследуется земная поверхность и при работе на больших расстояниях, используются волны 0,9—6 м и 0,3—1 м. В управлении воздушного движения используются радары с длиной волн 7,5—15 см, а в загоризонтных радарах на станциях по обнаружению запусков ракет применяются 10-100-метровые волны.
Из истории развития радиолокации
Замысел об использовании радиолокации возник следом за открытием радиоволн. Так, в 1905 году сотрудником компании Siemens Кристианом Хюльсмейером был создан прибор, который при помощи радиоволн мог обнаруживать наличие крупных металлических объектов. Изобретателем было предложено устанавливать такие приборы на судах во избежание столкновений, например, при туманах. Тем не менее, в судовых компаниях не была выражена заинтересованность в новом приборе.
Были проведены радиолокационные исследования и на территории России. Так, еще в конце XIX столетия русским ученым Поповым было обнаружено то, что наличие металлических объектов препятствует распространению радиоволн.

В начале двадцатых годов американскими инженерами Альбертом Тейлором и Лeo Янгом при помощи радиоволн был обнаружен проплывающий корабль. Тем не менее, из-за того, что радиотехническая промышленность той поры была неразвитой, создавать радиолокационные станции в промышленных масштабах не представлялось возможным.
К производству первых радиолокационных станций, с помощью которых решались бы практические задачи, приступили в Англии в 30-х годах. Эта аппаратура была чрезвычайно громоздкой и могла устанавливаться либо на земле, либо на больших кораблях. Лишь в 1937 году создали первый миниатюрный радар, который можно было бы устанавливать на самолетах. В результате, перед Второй мировой войной у англичан имелась развернутая сеть с радиолокационными станциями именуемая Chain Home.
Радары периода Холодной войны
Во времена Холодной войны в Соединенных Штатах и в Советском Союзе появилась новая разновидность разрушительного оружия. Конечно же, это было появление межконтинентальных баллистических ракет. Своевременное выявление пусков таких ракет было животрепещущим.
Советский ученый Николай Кабанов предложил идею использовать короткие радиоволны для выявления воздушных судов противника на значительных дистанциях (до 3000 км). Все было достаточно просто. Ученый смог обнаружить, что 10-100-метровые радиоволны имеют расположенность к отражению от ионосферы.

Таким образом, при облучении целей на земной поверхности, они возвращаются также обратно к радарам. Позднее, основываясь на этой идее, ученые смогли разработать радары с загоризонтным обнаружением пуска баллистических ракет. Образцом таких установок может быть «Дарьял» — радиолокационная станция. Она целые десятилетия была в основе советских систем по предупреждению запусков ракет.
На сегодняшний день самым перспективным направлением в развитии радиолокационных систем принято считать создание радиолокационных станций с фазированными антенными решетками (ФАР). Такие устройства обладают не одним, а сотнями излучателей радиоволн. Всем их функционированием руководят мощные компьютеры. Излучаемые с помощью разных источников в ФАР радиоволны могут усиливаться одна другой, или наоборот, когда они будут совпадать по фазе либо ослабляться.
Сигналам радиолокационных станций с фазированными решетками могут придаваться любые необходимые формы. Они могут перемещаться в пространстве при отсутствии изменений в положениях самих антенн, а также функционировать на разных частотах излучения. Радары с фазированными решетками считаются надежнее и чувствительнее, чем такие же устройства с обычными антеннами.
Тем не менее, подобные радары обладают и недостатками. Самыми большими проблемами в радиолокационных станциях с ФАР являются их системы охлаждения. Более того, такие радарные установки отличаются чрезвычайной сложностью в процессе производства, а также весьма дорогостоящие.

Комплексы радаров с ФАР
О новых радиолокационных станциях с фазированными решетками известно то, что они уже сейчас устанавливаются на истребителях пятого поколения. Такие технологии используются в американских системах с ранним предупреждением о ракетных нападениях. Радиолокационные комплексы с ФАР предполагается устанавливать на «Арматах» — новейших танках российского производства. Многие эксперты отмечают, что РФ входит в число мировых лидеров, успешно разрабатывающих радиолокационные станции с ФАР.
warways.ru