
Поларис — Википедия
Материал из Википедии — свободной энциклопедии
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 15 ноября 2018; проверки требует 1 правка. Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 15 ноября 2018; проверки требует 1 правка. Перейти к навигации Перейти к поиску| «Поларис» | |
|---|---|
| UGM-27 «Polaris» | |
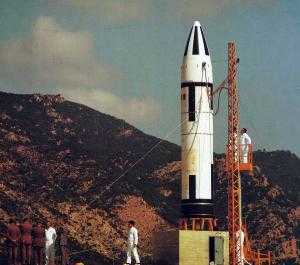
 Пуск UGM-27C Polaris A-3 с атомного подводного ракетоносца USS Robert E. Lee (SSBN-601) 20 ноября 1978 года | |
| Тип | Баллистическая ракета подводных лодок |
| Статус | Снята с вооружения |
| Разработчик | Lockheed |
| Годы разработки | A-1: С 1956 A-3: С 1960 |
| Начало испытаний | A-1: сентябрь 1958 года A-2: 10 ноября 1960 A-3: 7 августа 1962 |
| Принятие на вооружение | A-1: 15 ноября 1960 A-2: 26 июня 1962 A-3: 28 сентября 1964 |
| Производитель | Lockheed Corporation |
| Годы производства | 1959—1968 |
| Единиц произведено | Всего: 1153 шт.[1] Polaris A-1: 163 шт.[1] Polaris A-2: 346 шт.[1] Polaris A-3: 644 шт. |
ru.wikipedia.org
Баллистическая ракета подводных лодок UGM-27C Polaris A-3
]]> ]]>Ракета UGM-27C «Polaris-A3» была последней в семействе американских БРПЛ «Polaris», разработка которых началась с 1956 года. Принятие ее на вооружение пришлось на период резкого количественного/качественного роста и становления последней из трех составляющих американской «ядерной триады» — группировки атомных подводных ракетоносцев стратегического назначения, известных как «41 for Freedom». Сформировавшись к концу 1967 года, эта группировка лишь с конца 1980-х годов начала уступать свое место новейшей ракетно-ядерной системе ВМС США ]]>»Trident»]]> — «Ohio».
]]>Ракета UGM-27C «Polaris-A3» была последней в семействе американских БРПЛ «Polaris», разработка которых началась с 1956 года. Принятие ее на вооружение пришлось на период резкого количественного/качественного роста и становления последней из трех составляющих американской «ядерной триады» — группировки атомных подводных ракетоносцев стратегического назначения, известных как «41 for Freedom». Сформировавшись к концу 1967 года, эта группировка лишь с конца 1980-х годов начала уступать свое место новейшей ракетно-ядерной системе ВМС США ]]>»Trident»]]> — «Ohio».
Первые ракеты семейства — «Polaris-A1» и «Polaris-A2» — создавались в достаточно большой спешке, что не позволяло конструкторам оперативно внедрять в полном объеме самые новейшие технологии. Максимально раскрыть свой научно-технический потенциал на период начала 60-х годов американские ученые и инженеры смогли в процессе создания БРПЛ «Polaris-A3». Существенного прогресса по сравнению с предыдущими БРПЛ данного семейства удалось добиться благодаря тому, что консорциум создателей БРПЛ, возглавляемый корпорацией Lockheed, внедрил целый ряд принципиальных технологических усовершенствований — в двигателестроении, материаловедении, химии твердых топлив, электронике и т.д. Благодаря этому практически без увеличения габаритов ракеты («Polaris-A3» была длиннее «Polaris-A1» чуть больше чем на метр при том же диаметре) удалось добиться резкого роста дальности стрельбы, точности стрельбы и боевой эффективности (в первую очередь за счет оснащения ракеты разделяющейся головной частью рассеивающего типа с тремя боевыми блоками). Успешное выполнение жестких габаритных ограничений позволило вооружить новыми БРПЛ не только строящиеся ракетоносцы, но и уже существующие ПЛАРБ.
Ракета вышла на летные испытания в августе 1962 года в своей опытной модификации, получившей название «Polaris-A3X». Первый пуск был удачным лишь частично, что, учитывая множество новых решений, примененных при конструировании ракеты, было уже достаточно большой удачей. Ракетой «Polaris-A3» предполагалось оснастить прежде всего новейшие ПЛАРБ класса «Lafayette», постройка которых началась в США в 1961 году и закончилась в 1967 году (всего тремя подсериями был построен 31 атомный подводный ракетоносец). Кроме того, данными БРПЛ планировали перевооружить и первые ракетоносцы классов «George Washington» (5 ПЛАРБ, строились в 1958-1961 г.г.) и «Ethan Allen» (5 ПЛАРБ, строились в 1961-1962 г.г.), которые при создании были вооружены БРПЛ «Polaris-A1» и «Polaris-A2», соответственно.
Летные испытания БРПЛ «Polaris-A3X» проходили на Восточном Испытательном Ракетном Полигоне (авиабаза Патрик, Флорида). Для испытаний использовались стартовые стенды LC25A и LC29A. Первый пуск с борта подводной лодки был выполнен в апреле 1963 года и закончился неудачей. С июня 1963 года новая БРПЛ получила обозначение UGM-27C. Последний пуск опытной модификации «Polaris-A3X» был выполнен в июле 1964 года (успешно), после чего было принято решение о принятии БРПЛ на вооружение. Всего по программе испытаний было выполнено 38 пусков (2 — неудачно, 16 частично удачно). К моменту окончания программы запусков модификации A3X уже начались партионные пуски серийной модификации БРПЛ — «Polaris-A3» (встречается и обозначение «Polaris-A3P», они равнозначны). Первый состоялся (успешно) с борта ПЛАРБ в мае 1964 года, последний — в апреле 1968 года. Значительная продолжительность этапа партионных пусков объясняется не только стремлением максимально «отработать» новую ракету, но и большим числом подводных лодок, вступавших в строй с новой БРПЛ или переоснащаемых ею. Например, в течение 1964-1965 гг. на переоснащение ракетами UGM-27C были отправлены все 5 ПЛАРБ класса «George Washington», а последний ракетоносец получил новые ракеты в 1974 году (SSBN 611 «John Marshall» класа «Ethan Allen»). Из 31 ПЛАРБ класса «Lafayette» ракетой UGM-27C первоначально были оснащены последние 23 лодки — первые 8 получили на вооружение более старую ракету «Polaris-A2». Впоследствии и эти 8 ракетоносцев были перевооружены на ракеты «Polaris-A3» и «Poseidon-C3» (с 1970 года). Первые 10 ракетоносцев классов «George Washington» и «Ethan Allen» из-за несовершенной конструкции пусковых шахт потенциально не могли быть перевооружены на ракеты «Poseidon-C3», в результате чего они вынуждены были остаться с БРПЛ «Polaris A-3». Первый учебно-боевой пуск ракеты UGM-27C «Polaris-A3» с борта подводной лодки состоялся в ноябре 1965 года. На первое боевое патрулирование ПЛАРБ SSBN 626 «Daniel Webster» (класса «Lafayette») вышла в конце сентябре 1964 года. Последние ракеты «Polaris-A3» были изготовлены в январе 1968 года. Следует отметить, что с целью ускорения и удешевления работ американцы активно использовали в испытаниях различных узлов новой ракеты и имеющиеся БРПЛ — в частности, на модифицированных ракетах «Polaris-A2» были проверены система управления и боевые блоки для новой ракеты, пуски 8 ракеты были начаты в ноябре 1961 г. и окончены в декабре следующего года. В сентябре и декабре 1961 г. было также проведено два пуска модифицированных ракет «Polaris-A1», на которых проверялась принцип управления тягой на второй ступени будущей «Polaris-A3», где управляющие усилия создавались за счет впрыска фреона в закритическую часть сопел.
Еще до окончания отработки базовой модификации ракеты «Polaris-A3» стартовал ряд программ модернизации, направленных на повышение ее эффективности. Основной упор был сделан на повышение эффективности действия боевого оснащения ракеты в районе цели — прежде всего вероятности достижения самой цели в свете широкомасштабного развертывания работ по противоракетной и противокосмической обороне в СССР. Первой стала программа, стартовавшая в апреле 1962 года, целью которой было оснастить ракету КСП ПРО «PX-2»,состоящим из 6 легких ложных целей и 6 блоков дипольных отражателей. Летные испытания КСП ПРО с помощью БРПЛ «Polaris-A3X» начались в июле 1964 г., всего было проведено 12 пусков. Производство данного КСП ПРО началось в мае 1965 года, однако уже месяц спустя, в связи с предполагаемой невысокой эффективностью данного КСП ПРО, было решено не оснащать им БРПЛ «Polaris-A3», производство было прекращено. В начале 1965 года на конкурентной основе был дан старт сразу нескольким программам по повышению вероятности преодоления боевым оснащением ракеты перспективных советских систем ПРО. Первыми программами стали «Exo-PAC», «Mark Up» и «Coral». В ходе первой планировалось вместо одного из трех ББ ракеты установить т.н. «носитель средств прорыва», — «Penetration Aid Carrier (PAC)», позже получивший обозначение Mk 2 Mod 3, — который должен был отделяться от ракеты наряду с ББ, после чего, осуществив с помощью собственных двигателей на сжатом «холодном» газе (азоте) самоориентацию в пространстве, сформировать облако ложных целей длиной 230 км и диаметром до 19 км из 8 (позднее 9) равных частей, каждая из которых состояла из легкой ложной целей и дипольных отражателей. Позже, с внедрением программы «Impala», количество равных частей в облаке ложных целей сократилось до 7. Программа «Mark Up» была нацелена на повышение устойчивости ББ (без уменьшения их числа) к ПФЯВ, усовершенствованные ББ должны были получить обозначение Mk 2 Mod 2. В рамках программы «Coral» проводилось изучение воздействия радиации на электронику ракеты и возможность использования навесных траекторий для боевых блоков. Однако уже в июле 1965 года с целью повышения эффективности программы «Exo-PAC» и «Mark Up» были объединены в одну,получившую наименование «Hexo». Кроме этого, было решено повысить и устойчивость самой БРПЛ к ПФЯВ, что осуществлялось в рамках программы «Topsy», основанной на результатах, полученных в рамках программы «Coral». Работы перешли в практическую стадию в августе того же года. Уже в октябре 1965 года с целью дальнейшего повышения эффективности было решено объединить программы «Hexo» и «Topsy» — в ноябре новая программа получила наименование «Antelope». Основными задачами программы являлись:
- повысить вероятность преодоления ракетой т.н. заградительных ЯВ в районах пуска за счет роста устойчивости ракеты и ее боевого оснащения к ПФЯВ;
- повысить вероятность преодоления боевым оснащением ракеты системы ПРО за счет повышения устойчивости ББ к ПФЯВ БЧ противоракет на заатмосферном участке траектории;
- обеспечить возможность стрельбы по навесным траекториям с целью повышения вероятности выполнения боевой задачи.
В сентябре 1966 года в данную программу (без изменения ее названия) в качестве подпрограммы была включена и программа «Impala», ранее являвшаяся частью программы «Hexo» и выделившаяся в отдельную программу после образования программы «Antelope». Целью данной программы являлась разработка различных тяжелых ложных целей, способных, в отличие от дипольных отражателей и легких ложных целей, прикрывать ББ и на атмосферном участке траектории, указанные цели должны были размещаться в носовой части второй ступени ракеты. По программе «Antelope» в 1966-1968 годах было проведено 14 испытательных пусков, которые были разделены на две фазы — в первой, обозначавшейся «A3TX», испытывалось в основном модифицированная ракета, а во второй — «A3TY», — делался упор на испытания ее боевого оснащения. Еще один пуск «A3TY» был отменен. Испытания в рамках программы «Impala» проводились в 1967-1968 гг. на полигоне White Sands с помощью ракеты «Athena», всего было проведено 5 пусков, ракете с отработанным боевым оснащением планировалось присвоить обозначение «Polaris A-3A». Вместе с тем, несмотря на существенное повышение вероятности прорыва перспективных советских систем ПРО и ПКО, дальность полета модернизированного образца снизилась с 4630 км до 3710 км, что вызывало неудовольствие военных. Однако еще до окончания испытательной программы было принято окончательное решение об оснащении ракетоносцев класса «Lafayette» новой перспективной БРПЛ «Poseidon-C3». Программа «Antelope» была закрыта. Единственным ее итогом стало появление на свет модификации «Polaris A-3T», электронные устройства которой имели повышенную стойкость к ПФЯВ, а для бортовой кабельной сети ракеты были применены экранировка и специальные способы укладки с целью минимизации воздействия ПФЯВ. Кроме того, ракета получила возможность использования навесных траекторий для боевых блоков. Первые ракеты были изготовлены в августе 1968 года с выходом на массовое производство в октябре того же года. В марте 1972 года последние ракеты «Polaris A-3» были заменены на «Polaris A-3T». Ракетами «Polaris-A3T» были в конечном итоге оснащены — первоначально британцам поставлялись «Polaris-A3», — и 4 британских атомных подводных ракетоносца класса «Resolution», которые были построены с американской помощью в рамках т.н «соглашения Нассау» от декабря 1962 года. Все британские ракеты оснащались БЧ британского производства и отличались системой окраски.
]]> ]]>Первые 10 ракетоносцев классов «George Washington» и «Ethan Allen» из-за несовершенной конструкции пусковых шахт потенциально не могли быть перевооружены на ракеты «Poseidon-C3», в результате чего они вынуждены были остаться с БРПЛ «Polaris A-3». Однако желание так или иначе повысить эффективность боевого оснащения этих кораблей привело к появлению на свет очередной модификации ракеты «Polaris-A3», получившей название «Polaris-A3T». По сравнению с предшественницей она была оснащена улучшенной системой управления, более стойкой к поражающим факторам ядерного взрыва (при разработке этой системы были использованы результаты программы «Topsy»). Испытания усовершенствованной БРПЛ начались в ноябре 1966 года. Ракетами «Polaris-A3T» были в 1968-1970гг. оснащены и 4 британских атомных подводных ракетоносца класса ]]>»Resolution»]]>, которые были построены с американской помощью в рамках «пакта Нассау» от 1962 года. Британские ракеты оснащались БЧ британского производства и отличались системой окраски.
]]>Первые 10 ракетоносцев классов «George Washington» и «Ethan Allen» из-за несовершенной конструкции пусковых шахт потенциально не могли быть перевооружены на ракеты «Poseidon-C3», в результате чего они вынуждены были остаться с БРПЛ «Polaris A-3». Однако желание так или иначе повысить эффективность боевого оснащения этих кораблей привело к появлению на свет очередной модификации ракеты «Polaris-A3», получившей название «Polaris-A3T». По сравнению с предшественницей она была оснащена улучшенной системой управления, более стойкой к поражающим факторам ядерного взрыва (при разработке этой системы были использованы результаты программы «Topsy»). Испытания усовершенствованной БРПЛ начались в ноябре 1966 года. Ракетами «Polaris-A3T» были в 1968-1970гг. оснащены и 4 британских атомных подводных ракетоносца класса ]]>»Resolution»]]>, которые были построены с американской помощью в рамках «пакта Нассау» от 1962 года. Британские ракеты оснащались БЧ британского производства и отличались системой окраски.
Учебно-боевые пуски ракет «Polaris-A3T» производились в акваториях Восточного и Западного Ракетного Испытательного Полигона (авиабаза Ванденберг, Калифорния). Последний пуск БРПЛ «Polaris-A3T» с борта американской ПЛАРБ состоялся в апреле 1979 года. К концу 1981 года, в связи с вводом в строй новейших ПЛАРБ класса «Ohio» и необходимостью удерживать общее число носителей и боезарядов в рамках, определяемых международными договорами, все американские ПЛАРБ с БРПЛ «Polaris-A3T» были выведены из состава стратегических сил постоянной готовности, ракетные отсеки были удалены, а лодки переклассифицированы для выполнения иных задач.
Британские ракетоносцы продолжали выполнять боевые патрулирования с БРПЛ «Polaris-A3T» на борту вплоть до 1987 года. К 1992 г. в рамках программы «Chevaline» британские ракеты и их носители были существенно модифицированы (ракеты получили обозначение «Polaris-A3TK»), что позволило значительно повысить эффективность британских морских стратегических ядерных сил. Только в 1996 году БРПЛ «Polaris-A3TK» были сняты с вооружения ВМФ Великобритании и заменены на БРПЛ «Trident-II» D5, носителями для которых выступали новейшие ПЛАРБ класса «Vanguard».
]]> ]]>Рассказ о ракете «Polaris A-3» был бы неполным без упоминания об ее варианте — ракете «Polaris Mk3» (см. схему), которой планировалось оснастить до 25 надводных кораблей различных классов, принадлежащих США, Великобритании, Франции, Италии и ФРГ, общим количеством до 200 БРПЛ. Идея т.н. MLF (Multilateral Force) была впервые публично озвучена президентом США Д.Ф. Кеннеди в мае 1961 года, однако ряд данных свидетельствует о том, что прорабатываться она начала гораздо раньше, в бытность президентом США Д. Эйзенхауэра. Косвенным свидетельством этому может служить тот факт, что при проведении глубокой модернизации итальянского крейсера довоенной постройки «Giuseppe Garibaldi», выполненной в 1957-1961 гг., корабль получил 4 ШПУ для надводного пуска БРПЛ «Polaris» (см. фото, схему) и соответствующие системы. В сентябре 1962 года с крейсера были проведены бросковые испытания массо-габаритного макета БРПЛ «Polaris A-1», однако реальных ракет итальянцы так и не получили. В ожидании окончания разработки и испытаний «Polaris Mk3» итальянцы приняли меры по дальнейшему росту ударных возможностей своих ВМС — на вошедших в состав флота в 1964 году однотипных крейсерах «Andrea Doria» и «Caio Duilio» было зарезервировано место под 2 ШПУ ракет «Polaris» на каждом корабле, ШПУ были изготовлены и хранились в арсеналах, однако на корабли никогда не устанавливались. В проекте заложенного в 1965 году крейсера «Vittorio Veneto» также было выделено место под 2 (по другим данным, 4) ШПУ ракет «Polaris». Однако принятое в декабре 1964 года в США командой нового президента Л. Джонсона решение поставило крест на идее MLF и на самой ракете «Polaris Mk3» — после Карибского кризиса американцы сняли с боевого дежурства свои БРСД «Thor» и «Jupiter», размещенные в Великобритании, Италии и Турции и формально входившие в состав вооруженных сил указанных стран, и стали очень осторожно относиться к идее передачи ядерного оружия и соответствующих технологий своим союзникам, не считая самого верного, т.е. англичан. Кроме того, успешная реализация программы строительства и ввода в строй ПЛАРБ ВМС США также привела к переоценке важности размещения ракет на уязвимых надводных кораблях. Данное решение, в свете уже состоявшегося в 1963 году вывода БРСД «Jupiter» из состава итальянских ВВС (36ª Aerobrigata Interdizione Strategica, 36-я авиаэскадрилья стратегического сдерживания, 30 ракет находились на боевом дежурстве в составе указанной эскадрильи в 1961-1963 гг.), явилось для тогдашнего итальянского правительства, имевшего серьезные внешнеполитические амбиции, весьма неприятным сюрпризом. Возможным выходом из сложившегося положения являлось создание ядерного оружия и средств его доставки своими собственными силами.
]]>Рассказ о ракете «Polaris A-3» был бы неполным без упоминания об ее варианте — ракете «Polaris Mk3» (см. схему), которой планировалось оснастить до 25 надводных кораблей различных классов, принадлежащих США, Великобритании, Франции, Италии и ФРГ, общим количеством до 200 БРПЛ. Идея т.н. MLF (Multilateral Force) была впервые публично озвучена президентом США Д.Ф. Кеннеди в мае 1961 года, однако ряд данных свидетельствует о том, что прорабатываться она начала гораздо раньше, в бытность президентом США Д. Эйзенхауэра. Косвенным свидетельством этому может служить тот факт, что при проведении глубокой модернизации итальянского крейсера довоенной постройки «Giuseppe Garibaldi», выполненной в 1957-1961 гг., корабль получил 4 ШПУ для надводного пуска БРПЛ «Polaris» (см. фото, схему) и соответствующие системы. В сентябре 1962 года с крейсера были проведены бросковые испытания массо-габаритного макета БРПЛ «Polaris A-1», однако реальных ракет итальянцы так и не получили. В ожидании окончания разработки и испытаний «Polaris Mk3» итальянцы приняли меры по дальнейшему росту ударных возможностей своих ВМС — на вошедших в состав флота в 1964 году однотипных крейсерах «Andrea Doria» и «Caio Duilio» было зарезервировано место под 2 ШПУ ракет «Polaris» на каждом корабле, ШПУ были изготовлены и хранились в арсеналах, однако на корабли никогда не устанавливались. В проекте заложенного в 1965 году крейсера «Vittorio Veneto» также было выделено место под 2 (по другим данным, 4) ШПУ ракет «Polaris». Однако принятое в декабре 1964 года в США командой нового президента Л. Джонсона решение поставило крест на идее MLF и на самой ракете «Polaris Mk3» — после Карибского кризиса американцы сняли с боевого дежурства свои БРСД «Thor» и «Jupiter», размещенные в Великобритании, Италии и Турции и формально входившие в состав вооруженных сил указанных стран, и стали очень осторожно относиться к идее передачи ядерного оружия и соответствующих технологий своим союзникам, не считая самого верного, т.е. англичан. Кроме того, успешная реализация программы строительства и ввода в строй ПЛАРБ ВМС США также привела к переоценке важности размещения ракет на уязвимых надводных кораблях. Данное решение, в свете уже состоявшегося в 1963 году вывода БРСД «Jupiter» из состава итальянских ВВС (36ª Aerobrigata Interdizione Strategica, 36-я авиаэскадрилья стратегического сдерживания, 30 ракет находились на боевом дежурстве в составе указанной эскадрильи в 1961-1963 гг.), явилось для тогдашнего итальянского правительства, имевшего серьезные внешнеполитические амбиции, весьма неприятным сюрпризом. Возможным выходом из сложившегося положения являлось создание ядерного оружия и средств его доставки своими собственными силами.
]]> ]]>После проведения растянувшейся на несколько лет обширной серии научно-исследовательских и опытно-конструкторских работ (с учетом наличия некоторой информации по БРПЛ «Polaris», полученной в свое время от американцев), была создана т.н. Единая межвидовая группа специализации GRS (Gruppo di Realizzazione Speciale Interforze), под эгидой которой в 1971 году начались работы по программе разработки баллистической ракеты морского базирования. Программа, как и сама ракета, получила наименование «Alfa», а официально целью программы было объявлено создание РДТТ большой мощности для гражданского и военного применения. К созданию ракеты были подключены ведущие итальянские промышленные компании — РДТТ разрабатывала BPD Spazio, наземное оборудование — Selenia, бортовую радиоэлектронику — Sistel. Основным подрядчиком была выбрана Aeritalia, среди прочих в числе участвовавших в проекте числились компании Laben и Motofides/Whitehead. Основной задачей являлась разработка двухступенчатой твердотопливной БР, способной обеспечить доставку ГЧ массой не менее 1 т на дальность не менее 1600 км, что при размещении ее на итальянских крейсерах позволяло обеспечить поражение отдельных целей в Европейской части СССР, включая Москву. К моменту выхода испытания РДТТ первой ступени был уже создан и отработан — было выполнено 8 стендовых огневых испытаний. Двигатель имел массу 8 т и имел длину 3,845 м при диаметре 1,37 м, развивал тягу 232 кН при времени работы 57 с, заряд смесевого твердого топлива в форме пятилучевой звезды имел массу 6,05 т, органами управления, как и на БРПЛ «Polaris», служили 4 поворотных сопла. Ступень РДТТ второй ступени находилась в процессе создания, все испытательные пуски проводились только с габаритным макетом второй ступени массой 0,95 т. Ракета была выполнена в одном диаметре, длина ракеты составляла 6,5 м. Серия испытательных пусков была проведена в период с февраля 1973 г. по апрель 1975 г. с полигона Salto di Quirra. Работы были прекращены в мае 1975 года, после того, как Италия присоединилась к Договору о нераспространении ядерного оружия. Никаких сведений о планируемом типе и характеристиках ГЧ для создававшейся ракеты не имеется.
]]>После проведения растянувшейся на несколько лет обширной серии научно-исследовательских и опытно-конструкторских работ (с учетом наличия некоторой информации по БРПЛ «Polaris», полученной в свое время от американцев), была создана т.н. Единая межвидовая группа специализации GRS (Gruppo di Realizzazione Speciale Interforze), под эгидой которой в 1971 году начались работы по программе разработки баллистической ракеты морского базирования. Программа, как и сама ракета, получила наименование «Alfa», а официально целью программы было объявлено создание РДТТ большой мощности для гражданского и военного применения. К созданию ракеты были подключены ведущие итальянские промышленные компании — РДТТ разрабатывала BPD Spazio, наземное оборудование — Selenia, бортовую радиоэлектронику — Sistel. Основным подрядчиком была выбрана Aeritalia, среди прочих в числе участвовавших в проекте числились компании Laben и Motofides/Whitehead. Основной задачей являлась разработка двухступенчатой твердотопливной БР, способной обеспечить доставку ГЧ массой не менее 1 т на дальность не менее 1600 км, что при размещении ее на итальянских крейсерах позволяло обеспечить поражение отдельных целей в Европейской части СССР, включая Москву. К моменту выхода испытания РДТТ первой ступени был уже создан и отработан — было выполнено 8 стендовых огневых испытаний. Двигатель имел массу 8 т и имел длину 3,845 м при диаметре 1,37 м, развивал тягу 232 кН при времени работы 57 с, заряд смесевого твердого топлива в форме пятилучевой звезды имел массу 6,05 т, органами управления, как и на БРПЛ «Polaris», служили 4 поворотных сопла. Ступень РДТТ второй ступени находилась в процессе создания, все испытательные пуски проводились только с габаритным макетом второй ступени массой 0,95 т. Ракета была выполнена в одном диаметре, длина ракеты составляла 6,5 м. Серия испытательных пусков была проведена в период с февраля 1973 г. по апрель 1975 г. с полигона Salto di Quirra. Работы были прекращены в мае 1975 года, после того, как Италия присоединилась к Договору о нераспространении ядерного оружия. Никаких сведений о планируемом типе и характеристиках ГЧ для создававшейся ракеты не имеется.
Состав
]]> ]]>Баллистическая ракета «Polaris-A3» (см.схему) частично унаследовала конструктивные особенности от своей предшественницы — БРПЛ «Polaris-A2». Ракета выполнена двухступенчатой с последовательным соединением ступеней, корпуса которых изготавливались из стеклопластика методом намотки стекловолокна с проклейкой эпоксидной смолой. За счет применения нового топлива, а также и экономии веса конструкции двигателя (и систем ракеты) удалось практически без изменения геометрических размеров (по сравнению с «Polaris-A2») заметно увеличить дальность стрельбы при одновременном увеличении забрасываемого веса.
]]>Баллистическая ракета «Polaris-A3» (см.схему) частично унаследовала конструктивные особенности от своей предшественницы — БРПЛ «Polaris-A2». Ракета выполнена двухступенчатой с последовательным соединением ступеней, корпуса которых изготавливались из стеклопластика методом намотки стекловолокна с проклейкой эпоксидной смолой. За счет применения нового топлива, а также и экономии веса конструкции двигателя (и систем ракеты) удалось практически без изменения геометрических размеров (по сравнению с «Polaris-A2») заметно увеличить дальность стрельбы при одновременном увеличении забрасываемого веса.
Маршевый РДТТ первой ступени A3P, разрабатывавшийся фирмой «Aerojet General», имел четыре поворотных сопла. Для управления вектором тяги двигателя на первой ступени ракеты применены кольцевые дефлекторы, установленные на каждом из сопел и сочлененные с соответствующими гидроприводами (эта система доказала свою жизнеспособность на БРПЛ «Polaris-A1» и «Polaris-A2»). Испытания показали высокую эффективность этого типа рулевого устройства и, в частности, возможность вывода ракеты на траекторию даже при значительном отклонении по вертикали в момент включения двигателя первой ступени. Система управления позволяла управлять ракетой по каналам тангажа, рыскания и крена. Двигатель включался электромеханическим приспособлением и мощным запалом, при этом хвостовые пробки сопел, предохранявшие двигатель от попадания воды при подводном ходе ракеты, выталкивались давлением рабочих газов в момент включения двигателя. На начальном этапе применялось топливо марки ANP 2969 из нитропластифицированного полиуретана, а позже, с целью оптимизации работы соплового блока, было применено топливо ANP 9696, у которого температура газов, образовывающихся при сгорании топлива, была снижена.
На ракетном двигателе второй ступени X-260, разработанном фирмой «Hercules Powder», установили четыре неподвижных сопла, а управляющие усилия создавались за счет впрыска фреона (марка Freon 114) в закритическую часть сопел. Запас фреона хранился в тороидальном баке, который заполнялся в заводских условиях. Данная система позволяла уверенно управлять ракетой на участке работы второй ступени. Ступени соединялись с помощью переходника из магниевого сплава. Для разделения маршевых ступеней использовался огневой способ. В передней части переходника крепился заряд, срабатывавший в момент разделения. После разделения переходник остается на второй ступени. Такой способ использовался и используется практически на всех американских БРПЛ. На данной ступени было применено составное модифицированное двухосновное топливо EJC.
Полет ракеты после выхода из пусковой шахты ПЛАРБ осуществлялся по заранее заданной программе без корректировки с подводной лодки-ракетоносца, что предъявляло высокие требования к системам навигационной привязки и наведения комплекса. Примененная в комплексе автономная инерциальная система управления Mk II обеспечивала вывод ракеты на заданную траекторию, стабилизацию ее полета и выключение двигателя второй ступени ракеты при достижении заданной скорости. Аппаратура системы управления расположена в неотделяемом приборном отсеке, который крепился к передней части корпуса второй маршевой ступени ракеты и был изготовлен из магниевого сплава. Здесь размещались платформа с акселерометрами и блоком высокоскоростных гироскопов, программный автомат управления полетом, блок вспомогательной электроаппаратуры, вычислительная машина, источники питания и т.д. На ракете модификации «Polaris-A3T» электроника имела повышенную стойкость к ПФЯВ. Система управления была разработана фирмами «General Electric» и «Hughes» с участием Массачусетского Технологического Института («Massachusetts Institute of Technology»). Она имела на 60% меньшую массу, чем инерциальная система управления БРПЛ «Polaris-A2».
]]>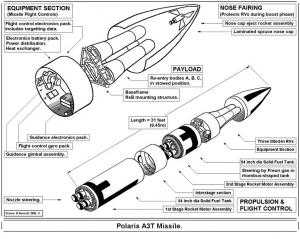 ]]>Ракета «Polaris-A3» была впервые в мире оснащена разделяющейся головной частью (см.схему), рассеивающего типа (РГЧ такого типа не обеспечивала индивидуального наведения на цель каждого из трех блоков — прицелить можно было один из блоков, либо центр их группировки), включавшей в себя 3 ББ Mk2 Mod 0, каждый из которых содержал в себе термоядерную БЧ W-58 мощностью 200 кт. Разведение ББ осуществлялось по сигналу системы управления — все ББ одновременно отводились от рамы, на которой они крепились, с помощью системы гидравлических толкателей, после чего производилось разделение и увод боевых блоков с помощью РДТТ малой тяги, это позволяло отказаться от системы обнуления тяги на второй ступени, что упростило ее конструкцию. На атмосферном участке стартовой траектории головная часть была прикрыта отделяющимся головным обтекателем, изготовленным из ламинированной древесины, в задней части обтекателя крепился заряд, срабатывавший в момент отделения обтекателя от второй ступени, после чего обтекатель уводился с помощью собственного РДТТ. Боевые блоки Mk2 на британских ракетах содержали в себе БЧ ET.317 британской разработки. История разработки данной БЧ в силу нестандартности подхода и необычности обстоятельств заслуживает особого внимания. В рамках т.н «соглашения Нассау» от декабря 1962 года американцы обязались предоставить всю необходимую научно-техническую и технологическую помощь для того, чтобы к концу десятилетия Великобритания обрела свои морские стратегические ядерные силы на основе системы вооружения «Polaris». Достигнутое согласие было дополнительно закреплено подписанием т.н. «соглашения о покупке «Polaris» в апреле 1963 года. К этому времени в Великобритании активно велись работы по созданию перспективной стратегической термоядерной бомбы «Weapon X» известной ныне как WE.177B (мощность 420 кт), разрабатываемой в рамках спецификации OR.1195 и пригодной для любого метода сброса, в том числе с задержкой детонации после приземления бомбы на землю на собственном тормозном парашюте — это позволяло применять ее даже со сверхмалых высот полета, благодаря чему у самолета-носителя значительно возрастали шансы продолеть рубежи ПВО. Для боеприпаса ZA.297 этой бомбы в качестве первичного или ядерного узла (триггера) было применено устройство «Katie», являвшееся развитием устройства «Super Octopus», испытанного на Невадском испытательном полигоне в марте 1962 года во время ядерного взрыва «Pampas», и дальнейшего развития «Super Octopus» — устройства «Cleo», испытанного там же в декабре того же года во время ядерного взрыва «Tendrac». Оба испытания прошли успешно. Первоначально «Cleo» должно было стать триггером в боеприпасе RE.179 для «британских» ракет «Skybolt» (вторичный термоядерный узел полностью заимствовался от американского боеприпаса W-59, предназначенного для данной ракеты, замена триггера была произведена потому, что американский узел «Tsetse» считался британцами опасным из-за повышенной чувствительности примененного там ВВ), но после того, как американцы закрыли эту программу спустя 15 дней после испытания «Tendrac», работы были переориентированы в ином направлении. В рамках передачи британцам сведений о боевом оснащении БРПЛ «Polaris-A3» американцы в январе 1963 г. передали техническую документацию по «своему» боеприпасу W-58 и AWRE (Atomic Weapons Research Establishment, разработчик британского ядерного оружия) принялся ее изучать. Результаты были неутешительны — в декабре 1963 г. было заявлено, что прямое заимствование W-58 невозможно, триггер «Kinglet», использованный американцами, был сочтен непригодным для применения британцами в силу тех же самых причин, что и триггер «Tsetse» ранее. Повторная перепроверка ничего не дала и в январе 1964 г. полученный негативный результат был сочтен окончательным. Выход из сложившейся ситуации был найден путем использования наработок по боеприпасу ZA.297 — триггера «Katie» и термоядерного узла «Simon», последний являлся уменьшенной версией вторичного узла боеприпаса W-59. На основе «Katie» был разработан триггер «Jennie» для боеприпаса ET.317 ракет «Polaris-A3», а в качестве вторичного узла для данного беприпаса была применена уменьшенная версия узла «Simon» — «Reggie». Несмотря на максимальное заимствование с целью сокращения времени на разработку и расходов, было ясно, что перед запуском в серийное производство новые боеприпасы необходимо испытать. Британцы решили, что вторичные узлы в испытании не нуждаются — они фактически являлись последовательно уменьшенными копиями вторичного узла в боеприпасе W-59, который успешно прошел полномасштабные испытания. Т.о., оставалось испытать только триггеры. Первым на испытания вышел триггер для бомбы WE.177B — в июле 1964 года во время ядерного испытания «Cormorant» на Невадском испытательном полигоне (далее все испытания тоже проходили на этом полигоне) было успешно подорвано устройство «Packard» (встречаются также наименования «Frida» и «Cedric», относящиеся к данному испытанию). Следующим планировалось испытать триггер для ET.317. Испытания данного триггера преследовали, помимо основной, и другую цель — планировалось изучить возможность потенциальной экономии до 130 кг плутония при производстве боеприпасов ET.317 для британских ракет (экономия до 0,45 кг на боеприпас, т.н. «Polaris Economy Tests»). По некоторым оптимистичным оценкам, экономия могла достигнуть и 200 кг. Однако испытателей постигла неудача — во время испытания «Courser» в сентябре 1964 г. устройство «Packard Prime» не взорвалось в штатном режиме из-за отказа американского внешнего нейтронного инициатора. Британские инженеры и ученые взяли тайм-аут и после тщательного анализа провели с теми же целями в сентябре 1965 ядерное испытание «Charcoal». Взрыв устройства прошел успешно и вскоре ET.317 был запущен в серийное производство.
]]>Ракета «Polaris-A3» была впервые в мире оснащена разделяющейся головной частью (см.схему), рассеивающего типа (РГЧ такого типа не обеспечивала индивидуального наведения на цель каждого из трех блоков — прицелить можно было один из блоков, либо центр их группировки), включавшей в себя 3 ББ Mk2 Mod 0, каждый из которых содержал в себе термоядерную БЧ W-58 мощностью 200 кт. Разведение ББ осуществлялось по сигналу системы управления — все ББ одновременно отводились от рамы, на которой они крепились, с помощью системы гидравлических толкателей, после чего производилось разделение и увод боевых блоков с помощью РДТТ малой тяги, это позволяло отказаться от системы обнуления тяги на второй ступени, что упростило ее конструкцию. На атмосферном участке стартовой траектории головная часть была прикрыта отделяющимся головным обтекателем, изготовленным из ламинированной древесины, в задней части обтекателя крепился заряд, срабатывавший в момент отделения обтекателя от второй ступени, после чего обтекатель уводился с помощью собственного РДТТ. Боевые блоки Mk2 на британских ракетах содержали в себе БЧ ET.317 британской разработки. История разработки данной БЧ в силу нестандартности подхода и необычности обстоятельств заслуживает особого внимания. В рамках т.н «соглашения Нассау» от декабря 1962 года американцы обязались предоставить всю необходимую научно-техническую и технологическую помощь для того, чтобы к концу десятилетия Великобритания обрела свои морские стратегические ядерные силы на основе системы вооружения «Polaris». Достигнутое согласие было дополнительно закреплено подписанием т.н. «соглашения о покупке «Polaris» в апреле 1963 года. К этому времени в Великобритании активно велись работы по созданию перспективной стратегической термоядерной бомбы «Weapon X» известной ныне как WE.177B (мощность 420 кт), разрабатываемой в рамках спецификации OR.1195 и пригодной для любого метода сброса, в том числе с задержкой детонации после приземления бомбы на землю на собственном тормозном парашюте — это позволяло применять ее даже со сверхмалых высот полета, благодаря чему у самолета-носителя значительно возрастали шансы продолеть рубежи ПВО. Для боеприпаса ZA.297 этой бомбы в качестве первичного или ядерного узла (триггера) было применено устройство «Katie», являвшееся развитием устройства «Super Octopus», испытанного на Невадском испытательном полигоне в марте 1962 года во время ядерного взрыва «Pampas», и дальнейшего развития «Super Octopus» — устройства «Cleo», испытанного там же в декабре того же года во время ядерного взрыва «Tendrac». Оба испытания прошли успешно. Первоначально «Cleo» должно было стать триггером в боеприпасе RE.179 для «британских» ракет «Skybolt» (вторичный термоядерный узел полностью заимствовался от американского боеприпаса W-59, предназначенного для данной ракеты, замена триггера была произведена потому, что американский узел «Tsetse» считался британцами опасным из-за повышенной чувствительности примененного там ВВ), но после того, как американцы закрыли эту программу спустя 15 дней после испытания «Tendrac», работы были переориентированы в ином направлении. В рамках передачи британцам сведений о боевом оснащении БРПЛ «Polaris-A3» американцы в январе 1963 г. передали техническую документацию по «своему» боеприпасу W-58 и AWRE (Atomic Weapons Research Establishment, разработчик британского ядерного оружия) принялся ее изучать. Результаты были неутешительны — в декабре 1963 г. было заявлено, что прямое заимствование W-58 невозможно, триггер «Kinglet», использованный американцами, был сочтен непригодным для применения британцами в силу тех же самых причин, что и триггер «Tsetse» ранее. Повторная перепроверка ничего не дала и в январе 1964 г. полученный негативный результат был сочтен окончательным. Выход из сложившейся ситуации был найден путем использования наработок по боеприпасу ZA.297 — триггера «Katie» и термоядерного узла «Simon», последний являлся уменьшенной версией вторичного узла боеприпаса W-59. На основе «Katie» был разработан триггер «Jennie» для боеприпаса ET.317 ракет «Polaris-A3», а в качестве вторичного узла для данного беприпаса была применена уменьшенная версия узла «Simon» — «Reggie». Несмотря на максимальное заимствование с целью сокращения времени на разработку и расходов, было ясно, что перед запуском в серийное производство новые боеприпасы необходимо испытать. Британцы решили, что вторичные узлы в испытании не нуждаются — они фактически являлись последовательно уменьшенными копиями вторичного узла в боеприпасе W-59, который успешно прошел полномасштабные испытания. Т.о., оставалось испытать только триггеры. Первым на испытания вышел триггер для бомбы WE.177B — в июле 1964 года во время ядерного испытания «Cormorant» на Невадском испытательном полигоне (далее все испытания тоже проходили на этом полигоне) было успешно подорвано устройство «Packard» (встречаются также наименования «Frida» и «Cedric», относящиеся к данному испытанию). Следующим планировалось испытать триггер для ET.317. Испытания данного триггера преследовали, помимо основной, и другую цель — планировалось изучить возможность потенциальной экономии до 130 кг плутония при производстве боеприпасов ET.317 для британских ракет (экономия до 0,45 кг на боеприпас, т.н. «Polaris Economy Tests»). По некоторым оптимистичным оценкам, экономия могла достигнуть и 200 кг. Однако испытателей постигла неудача — во время испытания «Courser» в сентябре 1964 г. устройство «Packard Prime» не взорвалось в штатном режиме из-за отказа американского внешнего нейтронного инициатора. Британские инженеры и ученые взяли тайм-аут и после тщательного анализа провели с теми же целями в сентябре 1965 ядерное испытание «Charcoal». Взрыв устройства прошел успешно и вскоре ET.317 был запущен в серийное производство.
]]> ]]>В ракетном отсеке каждой ПЛАРБ, оснащенной ракетами «Polaris-A3», были установлены 16 пусковых установок. Каждая из них имела классическую конструкцию — состояла из шахты, крышки с гидравлическим приводом, уплотнения крышки, стального пускового стакана, мембраны и оборудования подачи низкотемпературной парогазовой смеси, вырабатывавшейся индивидуальным газогенератором для каждой ПУ.
]]>В ракетном отсеке каждой ПЛАРБ, оснащенной ракетами «Polaris-A3», были установлены 16 пусковых установок. Каждая из них имела классическую конструкцию — состояла из шахты, крышки с гидравлическим приводом, уплотнения крышки, стального пускового стакана, мембраны и оборудования подачи низкотемпературной парогазовой смеси, вырабатывавшейся индивидуальным газогенератором для каждой ПУ.
Система обеспечивает выброс БРПЛ с глубины не более 30-40м (в зависимости от класса ПЛАРБ) на высоту около 10м над поверхностью воды. Все 16 ракет могли быть запущены за 16 минут. Метод старта БРПЛ — в штатных условиях только подводный, но при необходимости можно было осуществить и надводный пуск ракет.
Тактико-технические характеристики
| Длина ракеты, м | 9,86 |
| Диаметр ракеты, м | 1.37 |
| Масса снаряженной БРПЛ, т | 16,2 |
| Масса боевого снаряжения (3 ББ), т | 0,76 |
| Дальность полёта, км | 4630 |
| Круговое вероятное отклонение, м | 1000 |
| Число ББ, шт | 3 |
| Мощность ББ, кт | 200 |
| Тяга двигателя 1 ступени на уровне моря, кН | 356 |
| Высота апогея траектории ГЧ, км | 800 |
rbase.new-factoria.ru
Баллистическая ракета подводных лодок UGM-27A Polaris A-1
]]>]]>БРПЛ UGM-27A — двухступенчатая ракета с последовательным расположением ступеней (см. схему). Сварной корпус ракеты изготовлен из высокопрочной ванадиевой нержавеющей жароустойчивой стали АМЗ-256 с пределом текучести 160-170 кг/мм2.
В качестве двигателей для обеих ступеней ракеты использованы РДТТ. Двигатель первой ступени с тягой 45 т работает на полиуретане с присадкой алюминия и перхлората аммония (топливо ANP 2639). Присадка алюминия применяется для увеличения стабильности горения топлива и повышения удельного импульса до 245-250 кг*сек/кг (теоретический импульс 266 кг*сек/кг). Температура в камере двигателя первой ступени достигает 2700° С. Двигатель второй ступени имеет тягу 9 т (по другим данным — 4 т) и работает на полиуретане в смеси с сополимером полибутадиена и акриловой кислоты (топливо ANP 2673 на ракетах АХ, и ANP 2655 на ракетах А1Х и серийных А1P), имеет устройство отсечки тяги, что позволяет достигать различных дальностей полета. Заряд в РДТТ каждой ступени имеет внутреннюю полость в виде шестилучевой звезды, проходящей по продольной оси топливного заряда.
Каждый двигатель снабжен четырьмя соплами. Для управления вектором тяги двигателя на обеих ступенях ракеты применены кольцевые дефлекторы, установленные на каждом из сопел и сочлененные с соответствующими гидроприводами. Испытания показали высокую эффективность этого типа рулевого устройства и, в частности, возможность вывода ракеты с его помощью на траекторию даже при отклонении ракеты по вертикали в момент включения двигателя первой ступени на 40°. Двигатели включаются электромеханическим приспособлением и мощным запалом, при этом хвостовые пробки сопел, предохраняющие двигатели от попадания воды при подводном ходе ракеты, выталкиваются давлением рабочих газов, выделившихся в момент включения двигателя. Специальными опытами было установлено, что серийный двигатель ракеты «Поларис» нормально срабатывает после 1,5-годичного хранения на складе в специальном контейнере с микроклиматом штатной пусковой шахты подводной лодки.
Ракета оснащена отделяющейся в полете моноблочной головной частью W-47 мощностью 600 кт.
]]> ]]>
]]>
Для хранения и пуска ракет подводная лодка-ракетоносец имеет 16 пусковых шахт (см.описание), расположенных в средней части корпуса корабля. Крышки шахт, выступающие за пределы прочного корпуса, закрыты легкой обтекаемой надстройкой, длина которой на подводных лодках типа «Джордж Вашингтон» (см. схему) составляет 40 м.
Перед пуском ракеты давление в пусковой шахте выравнивается с забортным, после чего открывается прочная крышка шахты и доступ забортной воде преграждает лишь сравнительно тонкая пластикатовая диафрагма, расположенная под прочной крышкой шахты. Затем под обтюратор ракеты через систему клапанов подается сжатый воздух по строго определенному графику, точно выдерживаемому специальной автоматической аппаратурой, что обеспечивает заданный режим движения ракеты в шахте. При движении вверх ракета разрывает диафрагму, и забортная вода свободно поступает в шахту. Специальный автомат системы замещения обеспечивает продувку водяного балласта для компенсации избытка в весе, возникающего при заполнении шахты водой. После пуска ракеты прочная крышка шахты автоматически закрывается и находящаяся в шахте забортная вода сливается в специальную цистерну, размещенную внутри лодки.
Стартовое ускорение ракеты около 10 g при скорости выхода из шахты 45 м/сек и отрицательном ускорении самой подводной лодки приблизительно 0.02 g. Установлено, что подобное ускорение движения ракеты не оказывает сколько-нибудь существенного воздействия на бортовую аппаратуру, чувствительные механизмы и устройства ракеты.
]]> ]]>
]]>
После неуправляемого движения в толще воды ракета выходит на поверхность со скоростью около 50 м/с. Двигатель первой ступени автоматически включается в работу при нахождении ракеты на высоте 10 м от поверхности воды. На высоте около 20000 м он отделяется от ракеты, и в тот же момент производится автоматическое включение в работу двигателя второй ступени. Отделение второй ступени от боевой части ракеты и остановка двигателей происходят по команде от инерциальной системы наведения ракеты в заданной расчетной точке траектории.Интервал между пусками ракет до 1 мин.
Полет ракеты осуществляется по заранее заданной программе-траектории без какой-либо последующей корректировки с подводной лодки-ракетоносца, что предъявляет высокие требования к системам навигационной привязки и наведения комплекса. Примененная в комплексе автономная инерциальная система управления Mk I обеспечивает вывод ракеты на заданную траекторию, стабилизацию ее полета и выключение двигателя второй ступени ракеты при достижении заданной начальной скорости. Ее бортовая аппаратура расположена в приборном отсеке, который находится в средней части корпуса ракеты. Здесь размещаются стабилизированная платформа с акселерометрами, программный автомат управления полетом, блок вспомогательной электроаппаратуры, состоящий в основном из сервоусилителей и серводвигателей, цифровая счетно-решающая машина, источники питания и другие приборы. Вес бортовой аппаратуры наведения около 90 кг.
Для обеспечения контроля за техническим состоянием ракет и объективной оценки возможности их боевого использования на подводной лодке установлена специальная автоматическая система ОАТ1СО, распределительный щит которой обслуживает все блоки каждой из 16 ракет и может выполнять следующие операции:
непрерывную проверку всех основных блоков ракеты с момента ее погрузки на корабль;
периодическую экспериментальную проверку систем пуска и управления ракетой,
полную проверку узлов ракета в период предстартовой подготовки.
Система ОАТ1СО состоит из программного блока со считывающим устройством, системы развертки, блока переключения программ, селектора, генератора тактовых импульсов, блока сравнения и блока индикаторов с печатающим устройством.
Перед стартом ракеты бортовая аппаратура подключается к корабельной системе приборов управления ракетной стрельбой (ПУРС) типа Мк-80, примененной впервые на одиннадцати подводных лодках типа «Джордж Вашингтон» и «Итэн Аллен». При этом в аппаратуру управления начинают непрерывно поступать данные, задающие координаты траектории и величину скорости полета ракеты в конце активного участка. Одновременно производится ориентация и раскрутка гироскопов и т.д.
Аппаратура ПУРС состоит из вычислительной машины с блоками памяти, хранящими информацию о возможных целях, и оптико-электрического устройства, служащего для контроля ориентации стабилизированной платформы.
С помощью вычислительной машины ПУРС решаются следующие основные задачи:
рассчитывается траектория полета ракеты;
определяется местная вертикаль и производится ориентация стабилизированной платформы бортовой аппаратуры ракеты; в бортовую систему управления вводятся величины необходимой скорости полета ракеты в конце активного участка траектории;
фиксируются отклонения масштабных коэффициентов акселерометра;
осуществляется непрерывный контроль за бортовой аппаратурой ПУРС и готовностью ракеты к старту.
Бортовая система ПУРС связана с навигационным комплексом SINS , от которого поступают данные о текущих координатах самого корабля и других параметрах, характеризующих его движение, а также сведения о положениях истинного меридиана и самого корабля относительно вертикали во время качки.
В навигационном посту ракетной подводной лодки размещаются следующие узлы и устройства:
три комплекта системы SINS, смонтированные на стабилизированной платформе;
стабилизированный перископ для использования в целях астронавигации из подводного положения;
радионавигационная система;
две специальные вычислительные машины типа «Навдак»
Оптическая система автоматического слежения за звездами имеет свою аналого-цифровую вычислительную машину «Стардак», которая служит для выработки данных, обеспечивающих стабилизацию системы. «Стардак» получает и перерабатывает исходные данные, характеризующие движение подводной лодки, и в результате перископ астронавигационной системы оказывается постоянно наведенным на ту или иную звезду, выбранную в качестве ориентира. Кроме того, с помощью машин «Стардак» вычисляются координаты самого корабля, которые затем передаются в другую вычислительную машину типа «Навдак».
Все три комплекта навигационной системы SINS работают независимо и параллельно. Их одновременное применение позволяет свести к минимуму ошибки в определении истинного местоположения корабля, поскольку поступающие с их выходов данные взаимно корректируют друг друга. Данные от радионавигационной системы и перископов также поступают на вход вычислительной машины, а данные о целях заранее вводятся в блоки-памяти вычислительной машины системы управления полетом ракеты. Таким образом, данные, вырабатываемые всеми элементами системы управления, непрерывно сравниваются и анализируются. В случае появления недопустимого по величине отклонения того или иного параметра по сравнению с заданным в работу включается вычислительная машина «Навдак», вычисляющая поправку и вводящая исправленное значение данного параметра в соответствующее устройство системы управления. Навигационная система комплекс включает также успокоители качки подводной лодки с гироскопом весом около 23 т.
]]> ]]>Учитывая значение, чрезвычайную сложность и стоимость комплекса «Polaris A-1», большое внимание было уделено разработке средств транспортировки комплекса. Для транспортировки ракет самолетами созданы специальные ударостойкие герметичные контейнеры.
]]>Учитывая значение, чрезвычайную сложность и стоимость комплекса «Polaris A-1», большое внимание было уделено разработке средств транспортировки комплекса. Для транспортировки ракет самолетами созданы специальные ударостойкие герметичные контейнеры.
Отработаны также средства транспортировки ракет по железной дороге на открытых платформах и по шоссейным дорогам с помощью специальных автомашин, а для транспортировки ракет по водным путям сконструирована баржа катамаранного типа со специальным ангаром, способная перевозить ракеты общим весом до 200 т.
Ракеты и боеголовки к ним к месту стоянки подводных лодок-ракетоносцев доставляются в контейнерах, которые затем вместе с ракетами устанавливаются подъемным краном в пусковые шахты подводной лодки. Ракеты в контейнерах могут также грузиться на специальные транспортные суда или плавбазы (например, типа «Хэнли») для доставки на подводные лодки, находящиеся в открытом море.
rbase.new-factoria.ru
Поларис — Википедия (с комментариями)
Ты — не раб!
Закрытый образовательный курс для детей элиты: «Истинное обустройство мира».
http://noslave.org
Материал из Википедии — свободной энциклопедии
| «Поларис» | |
| UGM-27 «Polaris» | |
 Пуск UGM-27C Polaris A-3 с атомного подводного ракетоносца USS Robert E. Lee (SSBN-601) 20 ноября 1978 года | |
| Тип | Баллистическая ракета подводных лодок |
|---|---|
| Статус | Снята с вооружения |
| Разработчик | Lockheed |
| Годы разработки | A-1: С 1956 |
| Начало испытаний | A-1: сентябрь 1958 года |
| Принятие на вооружение | A-1: 15 ноября 1960 |
| Годы производства | 1959-1968 |
| Единиц произведено | Всего: 1153 шт.[1] |
| Годы эксплуатации | A-1: 1960-1965 |
| Основные эксплуатанты | США США |
| Базовая модель | UGM-27A Polaris A-1 |
| Модификации | UGM-27B Polaris A-2 |
| Основные технические характеристикиМаксимальная дальность: 1853 км Забрасываемый вес: 326—350 кг Точность (КВО): 1800 м Тип ГЧ: моноблочная, отделяющаяся W47-Y1 600 кт | |
↓Все технические характеристики | |
UGM-27 «Поларис» (англ. UGM-27 «Polaris», [pə’lɑ:rɪs] — Полярная звезда) — американская двухступенчатая твердотопливная баллистическая ракета (БРПЛ), предназначенная для размещения на атомных подводных лодках (АПЛ).
Первоначально БРПЛ «Поларис» размещалась на ПЛАРБ типа «Джордж Вашингтон». Начало испытаний — сентябрь 1958 года. 20 июля 1960 года с АПЛ «Джордж Вашингтон» (SSBN-598), был произведен первый пуск ракеты «Поларис А1» из-под воды с глубины 20 м.
15 ноября 1960 года БРПЛ «Polaris A-1» была принята на вооружение в США.
«Поларис-А1» состояла на вооружении всего пять лет, до середины 60-х годов, а затем была заменена на модифицированные ракеты с лучшими основными ТТХ (дальность, точность, забрасываемый вес, мощность и тип боевого оснащения), а с начала 70-х — на ракеты «Посейдон».
Согласно заключённому в декабре 1962 г. Пакту Нассау, США обязались поставить в Великобританию ядерные ракеты Polaris в обмен на передачу США в аренду базы для атомных подводных лодок в Holy Loch, близ Глазго.
Устройство и работа
 «Поларис» имела две последовательно расположенные ступени, в каждой из которых располагался индивидуальный РДТТ.
Корпусы ступеней изготовлялись из жаропрочной нержавеющей ванадиевой стали марки АМЗ-256 с пределом текучести 160—170 кг/мм².
«Поларис» имела две последовательно расположенные ступени, в каждой из которых располагался индивидуальный РДТТ.
Корпусы ступеней изготовлялись из жаропрочной нержавеющей ванадиевой стали марки АМЗ-256 с пределом текучести 160—170 кг/мм².
РДТТ первой ступени снаряжался смесевым топливом на основе перхлората аммония в качестве окислителя и горючего полиуретана с алюминием, и присадками улучшающими стабильность скорости горения, формование и хранения заряда. Удельный импульс двигателя первой ступени достигал 250 кг·сек/кг.
РДТТ второй ступени снаряжался смесевым топливом на основе перхлората аммония в качестве окислителя и горючего полиуретана в смеси с сополимером полибутадиена и акриловой кислоты. Тяга этого двигателя составляла 4 тонны (по другим данным 9 тонн). Необходимая дальность полёта обеспечивалась выбором момента отсечки тяги.
Двигатели первой и второй ступени имели по 4 сопловых устройства каждый. Управление вектором тяги осуществлялось гидроприводом, управляющим кольцевыми дефлекторами каждого сопла. Испытания такой системы управления вектором тяги показали, что даже при отклонении ракеты на 40 градусов от вертикальной оси, при её старте, ракета способна компенсировать наклон и выйти на заданную траекторию. Сопла ракеты в состоянии хранения предохраняют вышибные пробки, которые при запуске двигателей автоматически удаляются из сопел избыточным давлением газов в камере сгорания.
Ракеты при пуске первоначально выбрасывались на поверхность воды из пусковых шахт АПЛ сжатым воздухом, затем, по мере перехода на модифицированные ракеты, пневматическую систему заменили на парогазовую систему выброса ракеты на поверхность воды при пуске. Проходя толщу воды при подводном пуске, ракета выходит на поверхность имея скорость 50 м/с. Включение РДТТ первой ступени производится при инерционном подъёме ракеты на высоту 10 метров от поверхности воды. Примерно на высоте 20 км первая ступень выработавшая топливный заряд отделяется от ракеты при помощи пирозамков, после чего производится запуск РДТТ второй ступени, и ракета продолжает ускорение до выработки топлива (или отсечки тяги) второй ступени.
Бортовая аппаратура управления, разработанная совместно фирмами «Дженерал Электрик» и «Хьюз», размещена в приборном отсеке, расположенном в средней части корпуса. Аппаратура управления включает в себя гиростабилизированную платформу с акселерометрами, программный автомат управления полётом с цифровой счетно-управляющей машиной, блок вспомогательной электроаппаратуры, электронные блоки сервоусилителей и серводвигателей, источники бортового электро- и пневмопитания и другие агрегаты. Во время полёта ракета не могла корректироваться на траектории, а следовала курсом, заранее определяемым системой навигационной привязки. Аппаратура системы управления весит около 90 кг.
В головной части «Поларис-А2» впервые на БРПЛ был применён комплект средств преодоления противоракетной обороны (КСП ПРО), разрабатывавшиеся Lockheed с 1961 года под обозначением «PX-1». В состав КСП ПРО входило 6 лёгких ложных целей и дипольных отражателей применявшихся при полёте головной части за пределами атмосферы и на переходном к атмосферному участке нисходящей ветви траектории, а также генераторы активных помех работавшие и на начальной части атмосферного участка. Лётные испытания в составе ракеты этот комплекс проходил в 1962 году, всего выполнено 12 пусков. В ВМС США в 1963—1964 годах поставлен 221 комплект «PX-1». Тем не менее, массово «PX-1» не развертывался, им был оснащен только один боекомплект БРПЛ (16 ракет) одной из четырнадцати ПЛАРБ являвшихся носителями «Polaris A-2».
Пуск ракеты в подводном положении производится после выравнивания давления воздуха в ракетной шахте с забортным давлением воды путём открывания специальных клапанов и заполнения шахты воздухом. На глубине 25 метров это давление равно около 2,5 кгс/см². После уравнивания давления открывается прочная крышка ракетной шахты, но ракета остается в шахте не заполненной водой благодаря тонкой пластиковой второй крышке установленной над ракетой. Непосредственно при старте под обтюратор шахты, на котором установлена ракета, подаётся сжатый воздух большого давления. Обтюратор начинает ускорять ракету, которая своей головной частью сбрасывает (выталкивает) пластиковую крышку и далее, по инерции, выходит в водное пространство, а затем в атмосферу, где на заданной высоте производится включение РДТТ первой ступени. Интервал между пусками ракет в залпе — 1 минута[2]
Модификации
Тактико-технические характеристики
| UGM-27A «Polaris A-1» | UGM-27B «Polaris A-2» | UGM-27C «Polaris A-3» | «Polaris B-3» | |
|---|---|---|---|---|
| Тип ракеты | БРПЛ | |||
| Типы носителей | «Джордж Вашингтон» | «Этэн Аллен» «Лафайет» (первые 9) | «Лафайет» «Джеймс Мэдисон» «Бенджамин Франклин» «Джордж Вашингтон» «Этэн Аллен» «Резолюшн» | |
| Количество пусковых установок | 16 | 16 | 16 | |
| Характеристики ракеты | ||||
| Количество ступеней | 2 | |||
| Масса ракеты, кг | 13000 | 14700 | 16200 | |
| Длина, м | 8,53 | 9,45 | 9,86 | |
| Диаметр, м | 1,37 | |||
| Забрасываемый вес, кг | 500 | 500 | 760 | |
| Тип головной части | термоядерная | |||
| Вид головной части | моноблочная с БЧ W47-Y1 (англ.)русск. | моноблочная с БЧ W47-Y2 (англ.)русск. | РГЧ рассеивающего типа с тремя ББ Mk 2RV (БЧ W58 (англ.)русск.) | |
| Количество×Мощность боевых блоков, кт | 1×600 | 1×1200 | 3×200 | |
| Система управления | автономная, инерциальная разработчик — MIT, изготовители — Дженерал Электрик и Хьюз | |||
| КВО, м | 900 | 900 | 600 | |
| Двигатель 1-й ступени (разработчик) | РДТТ A1P (Aerojet General) | РДТТ A2P (Aerojet General) | РДТТ A3P (Aerojet General) | РДТТ |
| Топливо: * Горючее * Окислитель | Полиуретан+Алюминий Перхлорат аммония | нет данных | ||
| Материал корпуса | Сталь | Сталь | Стеклопластик методом намотки | |
| Органы управления | Дефлекторы | Дефлекторы | Поворотные сопла | |
| Давление в камере сгорания, кг/см² | 70 | |||
| Реактивная тяга, т | 45 | |||
| Время работы двигателя, с | 54 | |||
| Температура в камере сгорания, с | 2700 °С | |||
| Двигатель 2-й ступени (разработчик) | РДТТ (Aerojet General) | РДТТ DDT-70 (Hercules Powder (англ.)русск., APL, ABL) | РДТТ X-260 (Hercules Powder) | |
| Топливо: * Горючее * Окислитель | Полиуретан+сополимер полибутадиена+Акриловая кислота Перхлорат аммония | нет данных | ||
| Материал корпуса | Сталь | Стекловолокно, намотка | Стеклопластик методом намотки | |
| Органы управления | Дефлекторы | Поворотные сопла | Впрыск фреона в закритическую часть сопла | |
| Давление в камере сгорания, кг/см² | 35 | |||
| Реактивная тяга, т | 9 (4) | |||
| Время работы двигателя, с | 70 | |||
| Тип старта | сухой, подводный | |||
| Параметры траектории | ||||
| Максимальная скорость, м/с | ~3600 | |||
| Высота апогея траектории, км | 640 | 800 | ||
| Максимальная дальность, км | 2200 | 2800 | 4600 | 3700 |
| Минимальная дальность, км | ||||
| Время полёта максимальное, с | ||||
| Скорость встречи с целью, м/с | ||||
| История | ||||
| Разработчик | Lockheed | |||
| Начало разработки | 1956 | 1958 | 1960 | |
| Пуски со стенда | ||||
| Пуски с подводной лодки | ||||
| Принятие на вооружение | 15 ноября 1960 | 26 июня 1962 | 28 сентября 1964 | не принималась |
| Изготовитель | ||||
Аналог БРПЛ «Поларис» в СССР
Невозможность создания твердотопливной ракеты (лучшая отечественная твердотопливная ракета ПР-1 испытанная в Капустином Яре в 1959 году, имела дальность всего 60-70 км), вынудила создавать очередную жидкостную ракету. Новая советская ракета Р-13 по всем основным техническим показателям уступала созданной раньше неё американской БРПЛ «Поларис -А1». Особенно (в 3,7 раза) Р-13 уступала «Поларису» по дальности полета и в 2,2 раза уступала в точности попадания (круговому вероятному отклонению). Однако, необходимо отметить, что головные части БРПЛ «Поларис-А1/А2» типов W47-Y1 и W47-Y2 обладали большим количеством дефектов и из 1000 изготовленных боеголовок эксплуатировались не более 300, тогда как остальные находились на устранении обнаруженных неисправностей, на 1966 год 75 % головных частей типа W47-Y2 были неработоспособны[5].
В отличие от «Полариса» Р-13 могла быть запущена только из надводного положения. Время предстартовой подготовки у Р-13 было более длительное, чем у «Поларис». В Р-13 применялись самовоспламеняющиеся компоненты топлива, поэтому с целью обеспечения пожарной безопасности и для снижения пожароопасности ракеты не заправлялись горючим, а находились на боевом дежурстве в шахтах подводных лодок, заправленные только окислителем. Горючее для ракет располагалось в подводной лодке в отдельных цистернах вне прочного корпуса лодки и заправлялось в ракету только в процессе предпусковой подготовки, что неизбежно увеличивало время предпусковой подготовки Р-13 и уменьшало полезный объём лодки.
Разработка комплекса Д-6 с первой твердотопливной отечественной БРПЛ начата по Постановлению Совмина СССР №1032-492 от 5 сентября 1958 г. и велась под те же самые тактико-технические требования, что предъявлялись и к комплексу Д-4 с ракетой Р-21. с Боеголовка — ядерная моноблочная БЧ мощностью 0.3-1 Мт. Д-6 проектировался, не испытывался. Смесевое топливо «Нейлон-С» из перхлората аммония , фурфурольно-ацетоновой смолы, тиокола марки «Т» и нитрогуанидина требовало изучения, разработки и создания специализированных заводов. С топливом «Нейлон-С» проектировалось пять вариантов БРПЛ, из которых вариант «С» имел дальность до 1100 км, а перспективный вариант — до 2500 км.[6]
| ТТХ | Поларис A1 | Поларис A2 | Р-11ФМ | Р-13 | Р-21 | M1 |
|---|---|---|---|---|---|---|
| Страна | США США | СССР СССР | Франция Франция | |||
| Год принятия на вооружение | 1960 | 1962 | 1959 | 1961 | 1963 | 1972 |
| Максимальная дальность, км | 2200 | 2800 | 150 | 650 | 1420 | 3000 |
| Забрасываемый вес, кг | 500 | 500 | 970 | 1600 | 1180 | 1360 |
| Тип головной части | моноблочная | |||||
| Мощность, Мт | 0,6 | 0,8 (1,2) | 0,01—0,5 | 1 | 0,8—1 | 0,5 |
| КВО, м | 1800 | ? | 8000 | 4000 | 2800 | ? |
| Стартовая масса, т | 12,7 | 13,6 | 5,5 | 13,745 | 19,65 | 20 |
| Длина, м | 8,53 | 9,45 | 10,34 | 11,83 | 14,21 | 10,67 |
| Диаметр, м | 1,37 | 0,88 | 1,3 | 1,4 | 1,49 | |
| Количество ступеней | 2 | 1 | 2 | |||
| Тип двигателя | РДТТ | ЖРД | РДТТ | |||
| Тип старта | сухой подводный | надводный | мокрый подводный | сухой подводный | ||
В культуре
Упоминается в одноименной песне группы Megadeth (альбом «Rust in Peace», 1990, автор текста Дейв Мастейн) в качестве мрачного апокалиптического символа безумия гонки вооружений.
См. также
- Программа Chevaline — британская модернизация ракет A3 с установкой комплекта преодоления ПРО.
Напишите отзыв о статье «Поларис»
Примечания
- ↑ 1 2 3 4 Gibson, James N. Nuclear Weapons of the United States: An Illustrated History. — Atglen, Pennsylvania: Schiffer Publishing Ltd., 1996. — С. 33. — (Schiffer Military History). — ISBN 0-7643-0063-6.
- ↑ [rbase.new-factoria.ru/missile/wobb/polaris_a1/polaris_a1.shtml Баллистическая ракета подводных лодок UGM-27A Polaris A-1 | Ракетная техника]
- ↑ Hathaway B., Spencer J. K., Crowl R. M. [www.dtic.mil/dtic/tr/fulltext/u2/a344894.pdf Ballistic Missile Defense: Strategic Target System Launches from Kauai] (англ.). U.S. General Accounting Office (1 September 1993). — Доклад председателю подкомитета по законодательству и национальной безопасности Комитета по правительственным операциям Палаты представителей США. GAO/NSIAD-93-270. Проверено 11 мая 2012. [www.webcitation.org/68BjOvQt7 Архивировано из первоисточника 5 июня 2012].
- ↑ Лукин М., Насибуллина Э., Жестарев Д. [www.kommersant.ru/doc/1828523?stamp=634593016212979216 Глобальный гиперзвуковой удар] (рус.) // Ъ-Наука. — М.: Коммерсантъ, 2011. — Вып. 9. — № 9.
- ↑ [www.nuclearweaponarchive.org/Usa/Weapons/Allbombs.html Complete List of All U.S. Nuclear Weapons] (англ.). NuclearWeaponArchive.org. Проверено 16 ноября 2011. [www.webcitation.org/65oAEay5m Архивировано из первоисточника 29 февраля 2012].
- ↑ [militaryrussia.ru/blog/topic-706.html Д-6 — SS-N-4 SARK (первая) | MilitaryRussia.Ru — отечественная военная техника (после 1945г.)]
Литература
- Волковский Н. Энциклопедия современного оружия и боевой техники. М., СПб.: АСТ, Полигон, 2001.
- Лангемак Б., Глушко В. Ракеты, их устройство и применение. М.-Л., 1935.
Ссылки
- [rbase.new-factoria.ru/missile/wobb/polaris_a1/polaris_a1.shtml Баллистическая ракета подводных лодок UGM-27A «Polaris A-1»]
- [rbase.new-factoria.ru/missile/wobb/polaris_a2/polaris_a2.shtml Баллистическая ракета подводных лодок UGM-27B «Polaris A-2»]
- [rbase.new-factoria.ru/missile/wobb/polaris_a3/polaris_a3.shtml Баллистическая ракета подводных лодок UGM-27C «Polaris A-3»]
- Andreas Parsch. [www.designation-systems.net/dusrm/m-27.html Lockheed UGM-27 Polaris] (англ.). Designation-Systems.net. Проверено 16 ноября 2011. [www.webcitation.org/65oAFRhRQ Архивировано из первоисточника 29 февраля 2012].
wiki-org.ru
Поларис — Википедия. Что такое Поларис
UGM-27 «Поларис» (англ. UGM-27 «Polaris», [pə’lɑ:rɪs] — Полярная звезда) — американская двухступенчатая твердотопливная баллистическая ракета (БРПЛ), предназначенная для размещения на атомных подводных лодках (АПЛ).
Первоначально БРПЛ «Поларис» размещалась на ПЛАРБ типа «Джордж Вашингтон». Начало испытаний — сентябрь 1958 года. 20 июля 1960 года с АПЛ «Джордж Вашингтон» (SSBN-598), был произведен первый пуск ракеты «Поларис А1» из-под воды с глубины 20 м.
15 ноября 1960 года БРПЛ «Polaris A-1» была принята на вооружение в США.
«Поларис-А1» состояла на вооружении всего пять лет, до середины 60-х годов, а затем была заменена на модифицированные ракеты с лучшими основными ТТХ (дальность, точность, забрасываемый вес, мощность и тип боевого оснащения), а с начала 70-х — на ракеты «Посейдон».
Согласно заключённому в декабре 1962 г. Пакту Нассау, США обязались поставить в Великобританию ядерные ракеты Polaris в обмен на передачу США в аренду базы для атомных подводных лодок в Holy Loch, близ Глазго.
Устройство и работа
Верхние ступени баллистической ракеты Polaris A3, Музей подводных сил«Поларис» имела две последовательно расположенные ступени, в каждой из которых располагался индивидуальный РДТТ. Корпусы ступеней изготовлялись из жаропрочной нержавеющей ванадиевой стали марки АМЗ-256 с пределом текучести 160—170 кг/мм².
РДТТ первой ступени снаряжался смесевым топливом на основе перхлората аммония в качестве окислителя и горючего полиуретана с алюминием, и присадками улучшающими стабильность скорости горения, формование и хранения заряда. Удельный импульс двигателя первой ступени достигал 250 кг·сек/кг.
РДТТ второй ступени снаряжался смесевым топливом на основе перхлората аммония в качестве окислителя и горючего полиуретана в смеси с сополимером полибутадиена и акриловой кислоты. Тяга этого двигателя составляла 4 тонны (по другим данным 9 тонн). Необходимая дальность полёта обеспечивалась выбором момента отсечки тяги.
Двигатели первой и второй ступени имели по 4 сопловых устройства каждый. Управление вектором тяги осуществлялось гидроприводом, управляющим кольцевыми дефлекторами каждого сопла. Испытания такой системы управления вектором тяги показали, что даже при отклонении ракеты на 40 градусов от вертикальной оси, при её старте, ракета способна компенсировать наклон и выйти на заданную траекторию. Сопла ракеты в состоянии хранения предохраняют вышибные пробки, которые при запуске двигателей автоматически удаляются из сопел избыточным давлением газов в камере сгорания.
Ракеты при пуске первоначально выбрасывались на поверхность воды из пусковых шахт АПЛ сжатым воздухом, затем, по мере перехода на модифицированные ракеты, пневматическую систему заменили на парогазовую систему выброса ракеты на поверхность воды при пуске. Проходя толщу воды при подводном пуске, ракета выходит на поверхность имея скорость 50 м/с. Включение РДТТ первой ступени производится при инерционном подъёме ракеты на высоту 10 метров от поверхности воды. Примерно на высоте 20 км первая ступень выработавшая топливный заряд отделяется от ракеты при помощи пирозамков, после чего производится запуск РДТТ второй ступени, и ракета продолжает ускорение до выработки топлива (или отсечки тяги) второй ступени.
Бортовая аппаратура управления, разработанная совместно фирмами «Дженерал Электрик» и «Хьюз», размещена в приборном отсеке, расположенном в средней части корпуса. Аппаратура управления включает в себя гиростабилизированную платформу с акселерометрами, программный автомат управления полётом с цифровой счетно-управляющей машиной, блок вспомогательной электроаппаратуры, электронные блоки сервоусилителей и серводвигателей, источники бортового электро- и пневмопитания и другие агрегаты. Во время полёта ракета не могла корректироваться на траектории, а следовала курсом, заранее определяемым системой навигационной привязки. Аппаратура системы управления весит около 90 кг.
В головной части «Поларис-А2» впервые на БРПЛ был применён комплект средств преодоления противоракетной обороны (КСП ПРО), разрабатывавшиеся Lockheed с 1961 года под обозначением «PX-1». В состав КСП ПРО входило 6 лёгких ложных целей и дипольных отражателей применявшихся при полёте головной части за пределами атмосферы и на переходном к атмосферному участке нисходящей ветви траектории, а также генераторы активных помех работавшие и на начальной части атмосферного участка. Лётные испытания в составе ракеты этот комплекс проходил в 1962 году, всего выполнено 12 пусков. В ВМС США в 1963—1964 годах поставлен 221 комплект «PX-1». Тем не менее, массово «PX-1» не развертывался, им был оснащен только один боекомплект БРПЛ (16 ракет) одной из четырнадцати ПЛАРБ являвшихся носителями «Polaris A-2».
Пуск ракеты в подводном положении производится после выравнивания давления воздуха в ракетной шахте с забортным давлением воды путём открывания специальных клапанов и заполнения шахты воздухом. На глубине 25 метров это давление равно около 2,5 кгс/см². После уравнивания давления открывается прочная крышка ракетной шахты, но ракета остается в шахте не заполненной водой благодаря тонкой пластиковой второй крышке установленной над ракетой. Непосредственно при старте под обтюратор шахты, на котором установлена ракета, подаётся сжатый воздух большого давления. Обтюратор начинает ускорять ракету, которая своей головной частью сбрасывает (выталкивает) пластиковую крышку и далее, по инерции, выходит в водное пространство, а затем в атмосферу, где на заданной высоте производится включение РДТТ первой ступени. Интервал между пусками ракет в залпе — 1 минута[2]
Модификации
Тактико-технические характеристики
| UGM-27A «Polaris A-1» | UGM-27B «Polaris A-2» | UGM-27C «Polaris A-3» | «Polaris B-3» | |
|---|---|---|---|---|
| Тип ракеты | БРПЛ | |||
| Типы носителей | «Джордж Вашингтон» | «Этэн Аллен» «Лафайет» (первые 9) | «Лафайет» «Джеймс Мэдисон» «Бенджамин Франклин» «Джордж Вашингтон» «Этэн Аллен» «Резолюшн» | |
| Количество пусковых установок | 16 | 16 | 16 | |
| Характеристики ракеты | ||||
| Количество ступеней | 2 | |||
| Масса ракеты, кг | 13000 | 14700 | 16200 | |
| Длина, м | 8,53 | 9,45 | 9,86 | |
| Диаметр, м | 1,37 | |||
| Забрасываемый вес, кг | 500 | 500 | 760 | |
| Тип головной части | термоядерная | |||
| Вид головной части | моноблочная с W47-Y1 (англ.)русск. | моноблочная с БЧ W47-Y2 (англ.)русск. | РГЧ рассеивающего типа с тремя Mk 2RV (БЧ W58 (англ.)русск.) | |
| Количество×Мощность боевых блоков, кт | 1×600 | 1×1200 | 3×200 | |
| Система управления | автономная, инерциальная разработчик — MIT, изготовители — Дженерал Электрик и Хьюз | |||
| КВО, м | 900 | 900 | 600 | |
| Двигатель 1-й ступени (разработчик) | РДТТ A1P (Aerojet General) | РДТТ A2P (Aerojet General) | РДТТ A3P (Aerojet General) | РДТТ |
| Топливо: * Горючее * Окислитель | Полиуретан+Алюминий Перхлорат аммония | нет данных | ||
| Материал корпуса | Сталь | Сталь | Стеклопластик методом намотки | |
| Органы управления | Дефлекторы | Дефлекторы | Поворотные сопла | |
| Давление в камере сгорания, кг/см² | 70 | |||
| Реактивная тяга, т | 45 | |||
| Время работы двигателя, с | 54 | |||
| Температура в камере сгорания, с | 2700 °С | |||
| Двигатель 2-й ступени (разработчик) | РДТТ (Aerojet General) | РДТТ DDT-70 (Hercules Powder (англ.)русск., , ) | РДТТ X-260 (Hercules Powder) | |
| Топливо: * Горючее * Окислитель | Полиуретан+сополимер полибутадиена+Акриловая кислота Перхлорат аммония | нет данных | ||
| Материал корпуса | Сталь | Стекловолокно, намотка | Стеклопластик методом намотки | |
| Органы управления | Дефлекторы | Поворотные сопла | Впрыск фреона в закритическую часть сопла | |
| Давление в камере сгорания, кг/см² | 35 | |||
| Реактивная тяга, т | 9 (4) | |||
| Время работы двигателя, с | 70 | |||
| Тип старта | сухой, подводный | |||
| Параметры траектории | ||||
| Максимальная скорость, м/с | ~3600 | |||
| Высота апогея траектории, км | 640 | 800 | ||
| Максимальная дальность, км | 2200 | 2800 | 4600 | 3700 |
| Минимальная дальность, км | ||||
| Время полёта максимальное, с | ||||
| Скорость встречи с целью, м/с | ||||
| История | ||||
| Разработчик | Lockheed | |||
| Начало разработки | 1956 | 1958 | 1960 | |
| Пуски со стенда | ||||
| Пуски с подводной лодки | ||||
| Принятие на вооружение | 15 ноября 1960 | 26 июня 1962 | 28 сентября 1964 | не принималась |
| Изготовитель | ||||
Аналог БРПЛ «Поларис» в СССР
Невозможность создания твердотопливной ракеты (лучшая отечественная твердотопливная ракета ПР-1 испытанная в Капустином Яре в 1959 году, имела дальность всего 60-70 км), вынудила создавать очередную жидкостную ракету. Новая советская ракета Р-13 по всем основным техническим показателям уступала созданной раньше неё американской БРПЛ «Поларис -А1». Особенно (в 3,7 раза) Р-13 уступала «Поларису» по дальности полета и в 2,2 раза уступала в точности попадания (круговому вероятному отклонению). Однако, необходимо отметить, что головные части БРПЛ «Поларис-А1/А2» типов W47-Y1 и W47-Y2 обладали большим количеством дефектов и из 1000 изготовленных боеголовок эксплуатировались не более 300, тогда как остальные находились на устранении обнаруженных неисправностей, на 1966 год 75 % головных частей типа W47-Y2 были неработоспособны[5].
В отличие от «Полариса» Р-13 могла быть запущена только из надводного положения. Время предстартовой подготовки у Р-13 было более длительное, чем у «Поларис». В Р-13 применялись самовоспламеняющиеся компоненты топлива, поэтому с целью обеспечения пожарной безопасности и для снижения пожароопасности ракеты не заправлялись горючим, а находились на боевом дежурстве в шахтах подводных лодок, заправленные только окислителем. Горючее для ракет располагалось в подводной лодке в отдельных цистернах вне прочного корпуса лодки и заправлялось в ракету только в процессе предпусковой подготовки, что неизбежно увеличивало время предпусковой подготовки Р-13 и уменьшало полезный объём лодки.
Разработка комплекса Д-6 с первой твердотопливной отечественной БРПЛ начата по Постановлению Совмина СССР №1032-492 от 5 сентября 1958 г. и велась под те же самые тактико-технические требования, что предъявлялись и к комплексу Д-4 с ракетой Р-21. с Боеголовка — ядерная моноблочная БЧ мощностью 0.3-1 Мт. Д-6 проектировался, не испытывался. Смесевое топливо «Нейлон-С» из перхлората аммония , фурфурольно-ацетоновой смолы, тиокола марки «Т» и нитрогуанидина требовало изучения, разработки и создания специализированных заводов. С топливом «Нейлон-С» проектировалось пять вариантов БРПЛ, из которых вариант «С» имел дальность до 1100 км, а перспективный вариант — до 2500 км.[6]
| Поларис A1 | Поларис A2 | Р-11ФМ | Р-13 | Р-21 | M1 | |
|---|---|---|---|---|---|---|
| Страна | США США | СССР СССР | Франция Франция | |||
| Год принятия на вооружение | 1960 | 1962 | 1959 | 1961 | 1963 | 1972 |
| Максимальная дальность, км | 2200 | 2800 | 150 | 650 | 1420 | 3000 |
| Забрасываемый вес, кг | 500 | 500 | 970 | 1600 | 1180 | 1360 |
| Тип головной части | моноблочная | |||||
| Мощность, Мт | 0,6 | 0,8 (1,2) | 0,01—0,5 | 1 | 0,8—1 | 0,5 |
| КВО, м | 1800 | ? | 8000 | 4000 | 2800 | ? |
| Стартовая масса, т | 12,7 | 13,6 | 5,5 | 13,745 | 19,65 | 20 |
| Длина, м | 8,53 | 9,45 | 10,34 | 11,83 | 14,21 | 10,67 |
| Диаметр, м | 1,37 | 0,88 | 1,3 | 1,4 | 1,49 | |
| Количество ступеней | 2 | 1 | 2 | |||
| Тип двигателя | РДТТ | ЖРД | РДТТ | |||
| Тип старта | сухой подводный | надводный | мокрый подводный | сухой подводный | ||
В культуре
Упоминается в одноименной песне группы Megadeth (альбом «Rust in Peace», 1990, автор текста Дейв Мастейн) в качестве мрачного апокалиптического символа безумия гонки вооружений.
См. также
- Программа Chevaline — британская модернизация ракет A3 с установкой комплекта преодоления ПРО.
Примечания
Литература
- Волковский Н. Энциклопедия современного оружия и боевой техники. М., СПб.: АСТ, Полигон, 2001.
- Лангемак Б., Глушко В. Ракеты, их устройство и применение. М.-Л., 1935.
Ссылки
wiki.sc
Поларис — Википедия РУ
UGM-27 «Поларис» (англ. UGM-27 «Polaris», [pə’lɑ:rɪs] — Полярная звезда) — американская двухступенчатая твердотопливная баллистическая ракета (БРПЛ), предназначенная для размещения на атомных подводных лодках (АПЛ).
Первоначально БРПЛ «Поларис» размещалась на ПЛАРБ типа «Джордж Вашингтон». Начало испытаний — сентябрь 1958 года. 20 июля 1960 года с АПЛ «Джордж Вашингтон» (SSBN-598), был произведен первый пуск ракеты «Поларис А1» из-под воды с глубины 20 м.
15 ноября 1960 года БРПЛ «Polaris A-1» была принята на вооружение в США.
«Поларис-А1» состояла на вооружении всего пять лет, до середины 1960-х годов, а затем была заменена на модифицированные ракеты с лучшими основными ТТХ (дальность, точность, забрасываемый вес, мощность и тип боевого оснащения), а с начала 70-х — на ракеты «Посейдон».
Согласно заключённому в декабре 1962 г. Пакту Нассау, США обязались поставить в Великобританию ядерные ракеты Polaris в обмен на передачу США в аренду базы для атомных подводных лодок в Holy Loch, близ Глазго.
Верхние ступени баллистической ракеты Polaris A3, Музей подводных сил«Поларис» имела две последовательно расположенные ступени, в каждой из которых располагался индивидуальный РДТТ. Корпусы ступеней изготовлялись из жаропрочной нержавеющей ванадиевой стали марки АМЗ-256 с пределом текучести 160—170 кг/мм².
РДТТ первой ступени снаряжался смесевым топливом на основе перхлората аммония в качестве окислителя и горючего полиуретана с алюминием, и присадками улучшающими стабильность скорости горения, формование и хранения заряда. Удельный импульс двигателя первой ступени достигал 250 кг·сек/кг.
РДТТ второй ступени снаряжался смесевым топливом на основе перхлората аммония в качестве окислителя и горючего полиуретана в смеси с сополимером полибутадиена и акриловой кислоты. Тяга этого двигателя составляла 4 тонны (по другим данным 9 тонн). Необходимая дальность полёта обеспечивалась выбором момента отсечки тяги.
Двигатели первой и второй ступени имели по 4 сопловых устройства каждый. Управление вектором тяги осуществлялось гидроприводом, управляющим кольцевыми дефлекторами каждого сопла. Испытания такой системы управления вектором тяги показали, что даже при отклонении ракеты на 40 градусов от вертикальной оси, при её старте, ракета способна компенсировать наклон и выйти на заданную траекторию. Сопла ракеты в состоянии хранения предохраняют вышибные пробки, которые при запуске двигателей автоматически удаляются из сопел избыточным давлением газов в камере сгорания.
Ракеты при пуске первоначально выбрасывались на поверхность воды из пусковых шахт АПЛ сжатым воздухом, затем, по мере перехода на модифицированные ракеты, пневматическую систему заменили на парогазовую систему выброса ракеты на поверхность воды при пуске. Проходя толщу воды при подводном пуске, ракета выходит на поверхность имея скорость 50 м/с. Включение РДТТ первой ступени производится при инерционном подъёме ракеты на высоту 10 метров от поверхности воды. Примерно на высоте 20 км первая ступень выработавшая топливный заряд отделяется от ракеты при помощи пирозамков, после чего производится запуск РДТТ второй ступени, и ракета продолжает ускорение до выработки топлива (или отсечки тяги) второй ступени.
Бортовая аппаратура управления, разработанная совместно фирмами «Дженерал Электрик» и «Хьюз», размещена в приборном отсеке, расположенном в средней части корпуса. Аппаратура управления включает в себя гиростабилизированную платформу с акселерометрами, программный автомат управления полётом с цифровой счетно-управляющей машиной, блок вспомогательной электроаппаратуры, электронные блоки сервоусилителей и серводвигателей, источники бортового электро- и пневмопитания и другие агрегаты. Во время полёта ракета не могла корректироваться на траектории, а следовала курсом, заранее определяемым системой навигационной привязки. Аппаратура системы управления весит около 90 кг.
В головной части «Поларис-А2» впервые на БРПЛ был применён комплект средств преодоления противоракетной обороны (КСП ПРО), разрабатывавшиеся Lockheed с 1961 года под обозначением «PX-1». В состав КСП ПРО входило 6 лёгких ложных целей и дипольных отражателей применявшихся при полёте головной части за пределами атмосферы и на переходном к атмосферному участке нисходящей ветви траектории, а также генераторы активных помех работавшие и на начальной части атмосферного участка. Лётные испытания в составе ракеты этот комплекс проходил в 1962 году, всего выполнено 12 пусков. В ВМС США в 1963—1964 годах поставлен 221 комплект «PX-1». Тем не менее, массово «PX-1» не развертывался, им был оснащен только один боекомплект БРПЛ (16 ракет) одной из четырнадцати ПЛАРБ являвшихся носителями «Polaris A-2».
Пуск ракеты в подводном положении производится после выравнивания давления воздуха в ракетной шахте с забортным давлением воды путём открывания специальных клапанов и заполнения шахты воздухом. На глубине 25 метров это давление равно около 2,5 кгс/см². После уравнивания давления открывается прочная крышка ракетной шахты, но ракета остается в шахте не заполненной водой благодаря тонкой пластиковой второй крышке установленной над ракетой. Непосредственно при старте под обтюратор шахты, на котором установлена ракета, подаётся сжатый воздух большого давления. Обтюратор начинает ускорять ракету, которая своей головной частью сбрасывает (выталкивает) пластиковую крышку и далее, по инерции, выходит в водное пространство, а затем в атмосферу, где на заданной высоте производится включение РДТТ первой ступени. Интервал между пусками ракет в залпе — 1 минута[2]
Невозможность создания твердотопливной ракеты (лучшая отечественная твердотопливная ракета ПР-1 испытанная в Капустином Яре в 1959 году, имела дальность всего 60-70 км), вынудила создавать очередную жидкостную ракету. Новая советская ракета Р-13 по всем основным техническим показателям уступала созданной раньше неё американской БРПЛ «Поларис -А1». Особенно (в 3,7 раза) Р-13 уступала «Поларису» по дальности полета и в 2,2 раза уступала в точности попадания (круговому вероятному отклонению). Однако, необходимо отметить, что головные части БРПЛ «Поларис-А1/А2» типов W47-Y1 и W47-Y2 обладали большим количеством дефектов и из 1000 изготовленных боеголовок эксплуатировались не более 300, тогда как остальные находились на устранении обнаруженных неисправностей, на 1966 год 75 % головных частей типа W47-Y2 были неработоспособны[5].
В отличие от «Полариса» Р-13 могла быть запущена только из надводного положения. Время предстартовой подготовки у Р-13 было более длительное, чем у «Поларис». В Р-13 применялись самовоспламеняющиеся компоненты топлива, поэтому с целью обеспечения пожарной безопасности и для снижения пожароопасности ракеты не заправлялись горючим, а находились на боевом дежурстве в шахтах подводных лодок, заправленные только окислителем. Горючее для ракет располагалось в подводной лодке в отдельных цистернах вне прочного корпуса лодки и заправлялось в ракету только в процессе предпусковой подготовки, что неизбежно увеличивало время предпусковой подготовки Р-13 и уменьшало полезный объём лодки.
Разработка комплекса Д-6 с первой твердотопливной отечественной БРПЛ начата по Постановлению Совмина СССР №1032-492 от 5 сентября 1958 г. и велась под те же самые тактико-технические требования, что предъявлялись и к комплексу Д-4 с ракетой Р-21. с Боеголовка — ядерная моноблочная БЧ мощностью 0.3-1 Мт. Д-6 проектировался, не испытывался. Смесевое топливо «Нейлон-С» из перхлората аммония , фурфурольно-ацетоновой смолы, тиокола марки «Т» и нитрогуанидина требовало изучения, разработки и создания специализированных заводов. С топливом «Нейлон-С» проектировалось пять вариантов БРПЛ, из которых вариант «С» имел дальность до 1100 км, а перспективный вариант — до 2500 км.[6]
| Поларис A1 | Поларис A2 | Р-11ФМ | Р-13 | Р-21 | M1 | |
|---|---|---|---|---|---|---|
| Страна | США США | СССР СССР | Франция Франция | |||
| Год принятия на вооружение | 1960 | 1962 | 1959 | 1961 | 1963 | 1972 |
| Максимальная дальность, км | 2200 | 2800 | 150 | 650 | 1420 | 3000 |
| Забрасываемый вес, кг | 500 | 500 | 970 | 1600 | 1180 | 1360 |
| Тип головной части | моноблочная | |||||
| Мощность, Мт | 0,6 | 0,8 (1,2) | 0,01—0,5 | 1 | 0,8—1 | 0,5 |
| КВО, м | 1800 | ? | 8000 | 4000 | 2800 | ? |
| Стартовая масса, т | 12,7 | 13,6 | 5,5 | 13,745 | 19,65 | 20 |
| Длина, м | 8,53 | 9,45 | 10,34 | 11,83 | 14,21 | 10,67 |
| Диаметр, м | 1,37 | 0,88 | 1,3 | 1,4 | 1,49 | |
| Количество ступеней | 2 | 1 | 2 | |||
| Тип двигателя | РДТТ | ЖРД | РДТТ | |||
| Тип старта | сухой подводный | надводный | мокрый подводный | сухой подводный | ||
http-wikipediya.ru
Энциклопедия кораблей/Вооружения/Баллистические ракеты/США/Поларис А1
В начале 1956 года президент США Д. Эйзенхауэр одобрил планы создания морской стратегической ракетно-ядерной системы. При этом предусматривалось, что реализация всей программы будет проводиться в три этапа с наращиванием боевых возможностей как ракет, так и их носителей. Итогом каждого из этапов должны были стать подводная лодка и ракета, имеющие лучшие боевые и эксплуатационные характеристики. Как потом выяснилось, это было дальновидное решение, позволяющие в короткие сроки обеспечить развертывание временного флота подводных ракетоносцев.
Первоначально, из-за финансовых затруднений, ракету для подводных лодок предложили создавать на базе БРСД «Юпитер», работы над которой в то время велись полным ходом, но без видимого успеха. Это могло сорвать своевременное выполнение планов первого этапа. К тому же специалисты флота посчитали наличие на лодке ракет с взрывоопасными компонентами жидкого топлива чрезмерным риском. Поэтому руководство министерства ВМС Военно-морские силы смогло предложить свой вариант. 8 декабря 1956 года оно обратилось в Министерство обороны США за разрешением самостоятельно разрабатывать ракету для флота. В этом же месяце оно было получено. Учитывая сложности с разработкой ЖРД Жидкостно-реактивный двигатель вообще и для ракет подводных лодок в частности, ставку сразу сделали на ракетные двигатели на твердом топливе (РДТТ Ракетный Двигатель Твердого Топлива), технология производства которых к 1957 году была уже отработана. Параллельно шли работы над проектом атомной подводной лодки — носителем ракетно-ядерного оружия.
В министерстве флота США было создано управление специальных проектов, которому поручили руководить разработкой подводной ракетной системы (субмарина и боевое оснащение к ней). Оно же должно было отвечать за конечный результат. В 1956 году был заключены контракты с фирмой Локхид на разработку эскизного проекта ракеты и на создание двигателей для нее — с фирмой Аэроджет. К концу этого года были выработаны тактико-технические требования к системе, установлены оптимальные размеры подводной лодки, ее ракетного отсека и ракеты.
В сентябре 1958 года на Восточном испытательном полигоне начались летные испытания ракеты, получившей обозначение UGM-27A «Поларис-А1». Первые пуски закончились неудачно. 20 апреля 1959 года очередной (пятый по счету) старт прошел успешно. Весь год ушел на отработку систем ракеты и головной части. Завершалась программа пусками с борта атомной подводной ракетной лодки «Дж. Вашингтон», переданной флоту в этом же году. 14 апреля 1960 года был выполнен успешный пуск с борта лодки, находившейся в надводном положении у берега острова Сан Клемент, Калифорния. Через три месяца состоялся пуск из подводного положения. Всего было выполнено 42 испытательных запуска. 15 ноября 1960 года ракетная система была принята на вооружение.
Баллистическая ракета подводных лодок «Поларис-А1» — двухступенчатая ракета с последовательным расположением маршевых ступеней. Корпуса двигателей несущей конструкции изготавливались из специальной стали. РДТТ Ракетный Двигатель Твердого Топлива первой и второй ступеней имели по четыре неподвижных сопла с поворотными дефлекторами, обеспечивавшими создание управляющих усилий в полете. Заряды двигателей изготовлялись из смесевого топлива, состоящего из перхлората аммония, полиуретана и алюминия с необходимыми добавками.
Маршевый двигатель второй ступени имел устройство отсечки тяги, что позволяло достигать различных дальностей полета. На ракету установили инерциальную систему управления, обеспечивавшую управление полетом на активном участке траектории и КВО Круговое вероятное отклонение в пределах 3700 м. Отделяющаяся в полете моноблочная головная часть Мк1 оснащалась термоядерным устройством W-47 мощностью 600 кт и могла поражать площадные цели на дальности до 2200 км от места старта.
На вооружении они состояли всего пять лет до середины 60-х годов.
ship.bsu.by