

Методы и устройства обработки сигналов в импульсно-доплеровских радиолокационных станциях: Учебное пособие
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
РЯЗАНСКАЯ ГОСУДАРСТВЕННАЯ РАДИОТЕХНИЧЕСКАЯ АКАДЕМИЯ
В.А. Федоров
МЕТОДЫ И УСТРОЙСТВА ОБРАБОТКИ СИГНАЛОВ В ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАЦИОННЫХ СТАНЦИЯХ

Рязань 2006
УДК 621.396.96
Методы и устройства обработки сигналов в импульсно-доплеровских радиолокационных станциях: Учеб. пособие / В.А. Федоров, Рязан. гос. радиотехн. акад.: Рязань, 2006. 48 с.
Содержит основные сведения о импульсно-доплеровских РЛС. Излагаются теоретические основы и принципы построения имульсно-доплеровских систем, рассматриваются особенности функционирования данных систем в различных режимах работы.
Предназначено студентам, обучающимся по специальностям 200700 “Радиотехника”, 201700 “Средства радиоэлектронной борьбы”, 201600 “Радиоэлектронные устройства”, изучающим дисциплины “Радиолокационные системы“, “Теория и техника радиолокации и радионавигации”, “Радиотехнические системы” и дополнительно материалы в спецгруппе, а также для курсового и дипломного проектирования. Рекомендовано для студентов других специальностей и специализаций направления “Радиотехника”.
Ил. 33. Библиогр.: 11 назв.
Импульсно-доплеровские РЛС, альтиметровые отражения, неоднозначная дальность.
Печатается по решению редакционно-издательского совета Рязанской государственной радиотехнической академии.
Рецензент: кафедра радиотехнических систем РГРТА (зав. кафедрой В.И. Кошелев)
Федоров Владимир Александрович
Методы и устройства обработки сигналов в импульсно-доплеровских радиолокационных станциях
Редактор Е.В. Ипатова
Корректор С.В. Макушина
Подписано в печать Формат бумаги 60 x 84 1/16.Бумага газетная. Печать трафаретная. Усл. печ. л. 3,0.
Уч.-изд. л.. 3,0. Тираж 100 экз. Заказ
Рязанская государственная радиотехническая академия.
390005, Рязань, ул. Гагарина, 59/1.
Редакционно-издательский центр © Рязанскаой государственной радиотехнической академии, 2006
Федеральное агентство по образованию
Рязанская государственная радиотехническая академия
В.А. ФЕДОРОВ
МЕТОДЫ И УСТРОЙСТВА ОБРАБОТКИ СИГНАЛОВ В ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАЦИОННЫХ СТАНЦИЯХ
Учебное пособие
Рязань 2006
Введение
Бортовые радиолокационные станции (БРЛС) по решаемым задачам строятся на основе когерентно-импульсных РЛС. Их особенность заключается в движении относительно земной (подстилающей) поверхности, облаков, искусственных отражателей, которые образуют пассивные помехи.
Пассивные помехи, действуя на радиолокатор, могут снижать эффективность его функционирования по нескольким причинам:
из-за превышения пассивной помехой смеси сигнала и шума происходит маскировка сигнала;
большая мощность пассивной помехи может привести к насыщению приемного тракта и подавлению полезных сигналов.
Кроме того, при наличии мощных помех повышается вероятность ложной тревоги и ложного захвата целей.
Борьба с пассивными помехами требует, прежде всего, ослабления мощности мешающих отражений, принимаемых антенной радиолокатора, и сужения динамического диапазона помех, для предупреждения перегрузки приемного тракта.
Сигналы, отражённые от полезных целей и пассивных помех могут приниматься не только по главному лепестку диаграммы направленности антенны, но и по боковым.
Антенну РЛС, расположенную на борту, вследствие ограниченности объёма носителя, выполнить с достаточно малыми боковыми лепестками диаграммы направленности трудно. Наличие боковых лепестков при движении РЛС вызывает расширение спектра отраженного сигнала от подстилающей поверхности.
В связи с изложенным, необходимо определить модель диаграммы направленности антенны (ДНА). Наиболее простой является аппроксимация ДНА в виде главного лепестка и сплошной сферы боковых лепестков.[1]. Более точное приближение даёт аппроксимация ДНА в виде главного лепестка, первых боковых лепестков и сплошной сферы остальных боковых лепестков.
Аппроксимация ДНА определяет степень соответствия реальных спектров сигналов и помех рассчитанным. В дальнейшем будем пользоваться простой моделью ДНА в виде главного лепестка и сплошной сферы боковых лепестков.
Методы и алгоритмы обработки сигналов
на встречных курсах
прерывным
с несущей частотой fo.
Приведенный спектр отражений от подстилающей поверхности соответствует направлению, совпадающему с осью летящего носителя РЛС, т.е. не учитываются отклонения по азимуту от линии полета. Участок спектра шириной соответствует пассивным помехам по боковым лепесткам, при этом максимальная доплеровская частота , где v – путевая скорость, — длина волны РЛС, и данный спектр симметричен относительно несущей частоты fо.
Участок спектра с нулевой доплеровской частотой соответствует отражениям от подстилающей поверхности по высоте, которые вследствие большого коэффициента отражения от земли имеют большую интенсивность отражений. Отражения по высоте называют также альтиметровыми отражениями.
Самая большая интенсивность отражений от подстилающей поверхности происходит по главному лепестку ДНА и доплеровская частота этих отражений определяется , где — угол между осью носителя РЛС и центром главного лепестка ДНА. При изменении угла спектр отражений по главному лепестку перемещается в пределах спектра отражений от пассивной помехи по боковым лепесткам.
При установке на носителе когерентно-импульсных РЛС, вследствие широкого спектра отражений от подстилающей поверхности, возникает задача выбора частоты повторений зондирующего сигнала.
Рассмотрим на примере спектр отражений, когда Fп выбирается исходя из однозначной максимальной дальности . Предположим, что
=100 км, v=300 v/сек
λ=3 см.
При данных параметрах
Fп= кГц, кГц.
Расчеты показывают, что<<. Тогда по ширине спектра пассивной помехи располагаются несколько спектральных составляющих Fп
На основании изложенного в бортовых РЛС следует применять импульсно-доплеровские РЛС, которые характеризуются как когерентно-импульсные с использованием Fп, соответствующей неоднозначно измеряемой дальности или высокой частоте повторения (ВЧП), позволяющей однозначно измерить скорость цели.
Спектр отражений при облучении подстилающей поверхности импульсной последовательностью в режиме ВЧП приве-
ден на рис. 2.
Рис. 2
Спектр принимаемого сигнала импульсно-доплеровской РЛС состоит из дискретных линий (гребенчатая структура), соответствующих несущей частоте f o и боковым частотам, где j целое число. Огибающая спектра определяется формой импульса. На рис. 2 форма спектра соответствует прямоугольному импульсу с длительностью равной τи.
vunivere.ru
Импульсно-доплеровский радиолокатор с фазоманипулированными сигналами
Использование: в системах, где требуется получение высокой разрешающей способности по доплеровской частоте и защищенности от пассивных помех. Сущность изобретения: содержит один задающий генератор 1, один фазовращатель 2 на 90°., четыре переключателя 3.1, 3.2, 3.3, 3.4, один усилитель мощности 4, один модулятор 5, один антенный переключатель 6, одну антенну 7, один усилитель высокой частоты 8, один смеситель 9, один усилитель промежуточной частоты 10, один синхронизатор 11, два согласованных фильтра 12.1, 12.2, два квантователя 13.1, 13.2, два блока селекции движущихся целей 14.1, 14.2, два пороговых блока 15.1, 15.2, один индикатор 16, что дает возможность двукратного расширения интервала однозначно измеряемых дальностей или доплеровских частот при одновременном увеличении защищенности от пассивных помех. 1 ил.
Изобретение относится к радиолокационной технике и может быть использовано в системах, где требуется получение высокой разрешающей способности по доплеровской частоте.
Известные импульсно-доплеровские РЛС содержат передатчик, состоящий из стабильного задающего генератора, усилителя мощности и модулятора, антенну с антенным переключателем, приемник, квантователь сигналов по дальности, фильтровую систему селекции движущихся целей, пороговый блок, синхронизатор и индикатор отображения сигналов. Наиболее близким устройством импульсно-доплеровской РЛС является устройство [1] поэтому оно выбрано в качестве прототипа. Особенность этой РЛС состоит в том, что с ее помощью практически однозначно определяется скорость цели. При этом возникает неоднозначность по дальности. Целью изобретения является расширение интервалов однозначно измеряемой дальности при выбранной высокой частоте повторения. На чертеже изображено предлагаемое устройство. Оно содержит задающий генератор 1, фазовращатель 2 на 90 о, четыре переключателя 3.1, 3.2, 3.3, 3.4, усилитель 4 мощности, модулятор 5, антенный переключатель 6, антенну 7, усилитель 8 высокой частоты, смеситель 9, усилитель 10 промежуточной частоты, синхронизатор 11, 12,10 12,2 два согласованных фильтра, квантователи 13,1, 13,2, блоки 14,1, 14,2 селекции движущихся целей, пороговые блоки 15,1, 15,2, индикатор 16. Радиолокатор работает следующим образом. Задающий генератор 1 создает стабильные непрерывные гармонические колебания. С помощью ключей 3.1, 3.2 и фазовращателя 2 из этого колебания создаются радиоимпульсы длительности То с бинарной модуляцией начальных фаз до значений 0 и П. Для этого ключи управляются импульсами синхронизатора 11. При этом ключ 31 изменяет положение в начале каждого периода повторения. Поэтому в смежных периодах повторения колебание на выходе переключателя 3.1 отличается по фазе на П. Переключатель 3.2 управляется другими импульсами синхронизатора 11 и изменение положения его происходит в каждом такте через 1/2 ТФормула изобретения
ИМПУЛЬСНО-ДОПЛЕРОВСКИЙ РАДИОЛОКАТОР С ФАЗОМАНИПУЛИРОВАННЫМИ СИГНАЛАМИ, содержащий антенну, задающий генератор, последовательно соединенные синхронизатор, модулятор, усилитель мощности, антенный переключатель, усилитель высокой частоты, смеситель и усилитель промежуточной частоты и последовательно соединенные первые квантователь, блок селекции движущихся целей и пороговый блок и индикатор, первый синхровход которого соединен с первым выходом синхронизатора, а второй синхровход с вторым выходом синхронизатора и вторым входом первого квантователя, при этом вход антенны соединен с вторым выходом антенного переключателя, а второй выход задающего генератора соединен с вторым входом смесителя, отличающийся тем, что, с целью расширения интервала однозначно измеряемых дальностей или доплеровских частот при одновременном увеличении защищенности радиолокатора от пассивных помех, введены четыре переключателя, два согласованных фильтра, входы которых соединены с выходом усилителя промежуточной частоты, фазовращатель на 90o и последовательно соединенные вторые квантователь, блок селекции движущихся целей и пороговый блок, выход которого соединен с вторым входом индикатора, при этом первый выход задающего генератора соединен с первыми входами первого и второго переключателей и через фазовращатель на 90o — с вторым входом первого переключателя, выход которого соединен с вторым входом второго переключателя, выход которого соединен с вторым входом усилителя мощности, выход первого согласованного фильтра соединен с первым и вторым входами соответственно третьего и четвертого переключателей, а выход второго согласованного фильтра соединен с первым и вторым входами соответственно четвертого и третьего переключателей, выход третьего переключателя соединен с первым входом первого квантователя, второй вход которого соединен с вторым входом второго квантователя, первый вход которого соединен с выходом четвертого переключателя, третий выход синхронизатора соединен с управляющими входами первого, третьего и четвертого переключателей, а четвертый выход с управляющим входом второго переключателя.РИСУНКИ
Рисунок 1www.findpatent.ru
Методы и устройства обработки сигналов в импульсно-доплеровских радиолокационных станциях: Учебное пособие, страница 2
Следует отметить, что спектр, аналогичный изображенному на рис. 2, будет и при отражении от объёмно-распределённых целей, таких как отражения от облаков, искусственных отражателей и т.д.
Из приведенного спектра отражений от подстилающей поверхности видно, что наиболее важным является выбор частоты повторения импульсов. Действительно, выбором Fп спектры соседних гармоник отражений от подстилающей поверхности можно перемещать в пределах от их слияния до образования свободных от помех спектральных зон, что позволяет в определенном режиме производить обнаружение полезных целей в зоне, свободной от пассивных помех.
Рассмотрим режим, когда полезная цель движется навстречу носителю РЛС. Этот режим называется сближением с целью в передней полусфере или режимом встречных курсов. Спектр соседних гармоник при отражении от земли и полезной цели показан на рис. 3.
Рис. 3
Для того чтобы спектр отражённых сигналов от цели находился в зоне, свободной от пассивных помех, необходимо выбрать Fп как
, (1)
где Fдmax – доплеровская частота, соответствующая максимальной скорости носителя.
Анализируя приведенное неравенство видим, что неравенство в левой части при встречных курсах выполняется всегда, т.к. точка спектра соответствует только скорости носителя РЛС. Поэтому Fп следует выбирать из правой части неравенства, соответствующей
,
или через скорости движения
, (2)
где Vнmax – максимальная скорость носителя РЛС.
Выбор частоты повторения по соотношению (2) соответствует режиму работы с ВЧП. При этом Fп получается высокой (Fп≥100 кГц), а скважность излучения оказывается малой (чаще всего 4-6), что позволяет относить эти станции к классу РЛС, работающих в режиме малой скважности с высокой частотой повторения, или к классу квазинепрерывных РЛС. Число импульсов в отражённой пачке от цели получается большим, составляющим сотни импульсов.
В режиме ВЧП период повторения импульсов T в десятки раз может быть меньше времени распространения сигнала до цели и обратно.
В момент излучения импульса приёмник закрывается, что приводит к многократному его закрыванию в пределах, на которых обнаруживаются цели. Приход отражённого импульса, когда приёмник закрыт, приводит к его потере. Это явление носит название эффекта “слепых” дальностей, а длительность закрытия приёмника соответствует попаданию цели в слепую зону.
Размер каждой слепой зоны превышает длительность зондирующих импульсов на время восстановления чувствительности приёмника.
Учитывая, что за время наблюдения цель изменяет свою дальность незначительно, приход отражённого импульса в момент слепой зоны приводит к потере всей отражённой пачки от цели. Для уменьшения эффекта “слепых” дальностей следует менять период повторения или частоту повторения .
Таким образом, при обнаружении цели за время наблюдения необходимо использовать несколько частот повторения, смена которых производится через определённый временной интервал.
Оптимальная обработка сигналов
в импульсно-доплеровских РЛС
В режиме ВЧП обнаружение сигналов от целей ведется на фоне шума приёмника.
Отражённый сигнал от цели представляет пачку радиоимпульсов с неизвестной доплеровской частотой, которая подвергается когерентной обработке. Чтобы учесть доплеровский сдвиг частоты, широко используются гребенчатые фильтры, представляющие набор узкополосных фильтров, осуществляющих когерентное накопление.
Ожидаемую пачку импульсов (копию сигнала) можно представить в виде произведения двух колебаний: последовательности видеоимпульсов и высокочастотного колебания несущей частоты , модулированного огибающей пачки, т.е.
,
которое соответствует ожидаемому сигналу. Если аддитивную смесь сигнала с шумом на входе приёмника обозначить , то отклик согласованного фильтра даёт на выходе корреляционный интеграл :
. (3)
Из выражения (3) вытекает следующий оптимальный алгоритм обработки пачки радиоимпульсов: принимаемая реализация колебаний стробируется. При этом получается колебание . Стробирование необходимо осуществлять в соответствии со временем запаздывания сигналов. При неизвестном времени запаздывания необходима многоканальная схема. Каждый временной канал относительно соседнего стробируется импульсной последовательностью, задержанной на длительность одного импульса пачки . Тогда число временных каналов в одном периоде повторения определяется как и соответствует величине скважности. В каждом канале дальности необходимо осуществить накопление сигналов пачки, т.е. вычислить интеграл (3). Интегрирование осуществляется узкополосным фильтром.
При неизвестной доплеровской частоте цели в каждом стробируемом канале, число доплеровских фильтров должно быть таково, чтобы перекрывать весь диапазон доплеровских частот, который в импульсных системах, благодаря периодичности спектра, можно принять равным .
Таким образом, согласованный фильтр обработки имеет структуру, представленную на рис. 4.
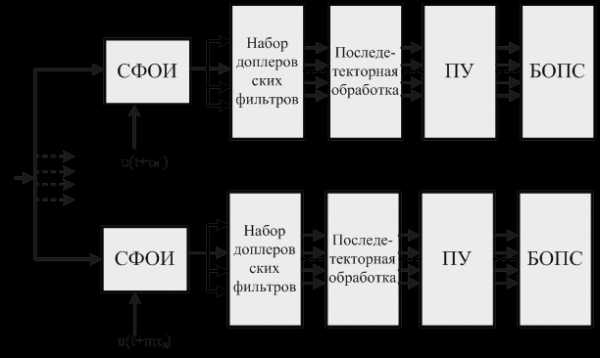
Рис. 4
Согласованные фильтры одиночного радиоимпульса (СФОИ) стробируются по дальности, с числом временных сигналов . В каждом канале ставятся узкополосные доплеровские фильтры, перекрывающие доплеровский диапазон целей, где производится накопление сигнала. Детектирование огибающей сигнала осуществляется в блоке последетекторной обработки, на выходе которого в пороговом устройстве (ПУ) происходит сравнение с пороговым уровнем с целью обнаружения сигнала. В блоке определения параметра сигнала (БОПС) определяются параметры цели, такие как скорость, дальность и т.д.
При обнаружении цели определяется доплеровская частота цели по номеру доплеровского фильтра и рассчитывается скорость цели:
. (4)
Практически вместо СФОИ лучше использовать усилитель промежуточной частоты (УПЧ), параметры которого согласованны с параметрами сигнала, а узкополосные доплеровские фильтры выполнить в виде блока цифровой обработки, включающего память на всю пачку и обработку на основе быстрого преобразования Фурье (БПФ).
Тогда согласованный фильтр имеет структуру, представленную на рис. 5.
 Рис. 5
Рис. 5
vunivere.ru
Двухдиапазонный импульсно-доплеровский радиолокатор
Изобретение относится к радиолокационной технике, к двухдиапазонным импульсно-доплеровским радиолокаторам (РЛ), используемым преимущественно в радиолокационных системах высокомобильных объектов, например летательных аппаратов, катеров и др. Достигаемым техническим результатом является повышение эксплуатационной технологичности РЛ за счет введения встроенных имитаторов цели для первого и второго микроволновых диапазонов и имитатора сигналов промежуточной частоты, обеспечивающих сквозной контроль РЛ от антенны до индикатора. В результате использования изобретения существенно повышается эксплуатационная технологичность РЛ на этапе его подготовки к применению или его восстановления, а также обеспечивается возможность повышения его эксплуатационной технологичности в режиме применения. 1 з.п. ф-лы, 2 ил.
Изобретение относится к радиолокационной технике, к импульсно-доплеровским радиолокационным устройствам, а более конкретно — к двухдиапазонным импульсно-доплеровским радиолокаторам, применяемым в системах обнаружения и сопровождения различного назначения.
Изобретение может быть использовано преимущественно в радиолокационных системах (РЛС) высокомобильных объектов, например летательных аппаратов, катеров, наземных самоходных установок и т.п. объектов, требующих повышенной эксплуатационной технологичности (ЭТ) и готовности к действию (применению).
ЭТ — это свойство конструкции РЛС, которое характеризует их приспособленность к проведению работ по техническому обслуживанию, по подготовке к применению, в режиме применения и в режиме восстановления (Эксплуатация радиотехнических комплексов. Под ред. А.И.Александрова. М., «Сов. радио», 1976. Эксплуатационная технологичность, стр.41).
Известны двухдиапазонные импульсно-доплеровские РЛС (ДИДРЛС), работающие в микроволновых диапазонах К, X, S, L (По отечественной терминологии: в диапазонах от миллиметровых до дециметровых длин волн или в диапазонах ультра- и сверхвысоких частот — УСВЧ и СВЧ).
Условно известные ДИДРЛС составляют две группы.
ДИДРЛС одной группы, работающие в разных парах диапазонов из указанных выше, представляют собой комбинации из двух разнодиапазонных радиолокаторов (РЛ), один из которых предназначен для обнаружения цели, а другой — для ее сопровождения. Оба РЛ работают на общий антенный блок и раздельные индикаторы. Аналоги этой группы описаны в источниках: Зенитные ракетные и ракетно-пушечные комплексы капиталистических стран (Обзор по материалам иностранной печати). Под ред. Е.А.Федосеева, М., НИЦ (770) — ГосНИИАС, 1986. ЗРПК «Флайкетчер», стр.143. Радиолокатор управления оружием. Wang Yui, Peng Jiating, CIE int, Conf. Radar Nan-jing. Now 4.07.86 — Beijng 1986. p 27-32 (Англия).
ДИДРЛС другой группы, работающие в диапазонах К и X, содержат когерентный РЛ с двумя диапазонными приемно-передающими каналами (ДППК), которые через блок коммутации связаны с общим трактом синхронного детектирования и выделения сигналов цели и с общим индикатором.
Оба ДППК имеют выходы на одинаковой промежуточной частоте (ПЧ). Варианты ДППК этой группы содержат как отдельные диапазонные антенны, так и антенны, объединенные одной антенной колонкой. Аналоги этой группы описаны в источниках: Двухдиапазонный моноимпульсный радиолокатор со встроенным контролем. Заявка №2001104500 от 20.02.2001. Заявитель ОАО «Корпорация «Фазотрон — НИИР». БИ №5 (февраль) 2003 г. Вертолетная импульсно-доплеровская радиолокационная система. Патент РФ №2191401 с приоритетом от 09.07.2001 г. Заявитель ОАО «Корпорация «Фазотрон — НИИР».
Наиболее близким аналогом (прототипом) заявленного изобретения является ДИДРЛС, описанная в указанном выше патенте РФ №2191401.
Прототип — это двухдиапазонный импульсно-доплеровский радиолокатор (ДИДРЛ), содержащий микроволновые первый и второй ДППК, каждый из которых содержит антенну со встроенным устройством связи и дополнительным входом, соединенную с антенным плечом циркулятора (антенного переключателя), выход которого подключен к первому входу приемника, вход циркулятора присоединен к выходу передатчика. Выходы приемников первого и второго ДППК подключены соответственно к первому и второму информационным входам коммутатора сигналов (КС).
Выход КС является входом последовательно соединенных синхронного детектора (СД), аналого-цифрового преобразователя (АЦП), процессора обработки сигналов (ПОС) и индикатора. При этом второй выход ПОС соединен с первым входом процессора данных (ПД), первый, второй и третий выходы которого соединены соответственно с вторым входом ПОС, управляющим входом КС и первым выходом синхронизатора.
В технической литературе ПОС называется также процессором цифровой обработки сигналов, а ПД — электронно-вычислительной машиной или ЭВМ (соответствующая литература приведена ниже).
Выходы синхронизатора с первого по пятый подключены соответственно к первому входу передатчика первого ДППК, первому входу передатчика второго ДППК, к второму входу СД, к второму входу приемника первого ДППК и второму входу приемника второго ДППК. Для связи с внешним электронным оборудованием в ПД предусмотрен отдельный выход.
Для обеспечения когерентности импульсных сигналов передатчиков, опорных сигналов приемников ДППК и опорных сигналов СД в синхронизаторе содержатся задающие генераторы (ЗГ) первого и второго ДППК и источники опорного сигнала для СД, а также их источники (генераторы) опорных задающих частот (ОЗЧ).
(Размещение ЗГ устройств первого и второго ДППК в составе синхронизатора не имеет принципиального значения для режима применения ДИДРЛ. ЗГ обычно входит в состав передатчика, который содержит соединенные между собой усилитель мощности (УМ) и ЗГ, являющийся также источником опорного сигнала и для приемника ДППК. Встроенным устройством связи в антенне ДППК обычно является петля связи, направленный ответвитель, вспомогательный излучатель и т.п. устройства.)
Известный ДИДРЛ в режиме применения работает следующим образом.
Синхронизатор обеспечивает согласованную работу составных частей РЛ, включающих первый и второй ДППК и общий тракт синхронного детектирования и выделения сигналов цели.
Управление синхронизатором осуществляется от ПД. Синхронизатор вырабатывает высокостабильные импульсные сигналы с высокочастотным заполнением для запуска передатчиков и высокостабильные опорные сигналы для приемников первого и второго ДППК, а также для СД. Сигналы передатчиков через циркуляторы поступают в антенны и излучаются ими.
Отраженные от цели сигналы принимаются теми же антеннами и через циркуляторы передаются на входы приемников, откуда после преобразования на ПЧ и усиления поступают на информационные входы КС. Управление КС осуществляется от ПД через его другой выход. При этом обеспечивается подключение в СД сигналов на ПЧ с выходов либо первого, либо второго ДППК. После детектирования в СД сигналы цели поступают в АЦП, где производится их преобразование в цифровую форму для ввода в ПОС. В последнем производится их накопление, свертка, пороговая обработка, а также доплеровские и дальномерные измерения. В нем же производится привязка к угловому положению антенны при совпадении ее диаграммы направленности с целью. В результате определяются координаты и радиальная скорость цели с использованием либо первого, либо второго ДППК. Кроме того, в ПОС формируется видеоинформация для отображения на индикаторе. С другого выхода ПОС цифровые данные о параметрах цели передаются в ПД, где обнаруженная цель берется на автоматическое сопровождение по координатам и скорости.
Связь с внешним радиоэлектронным оборудованием осуществляется через отдельный выход ПД.
Двухдиапазонность РЛ вызывает повышенные требования к его ЭТ не только в режиме прямого применения, когда, например, требуется текущая проверка работы приемников первого и второго ДППК, но и в режиме подготовки к применению, когда необходим сквозной контроль РЛ с использованием внешних контрольно-измерительных приборов. Данное обстоятельство существенно ограничивает ЭТ РЛ на высокомобильных носителях. По этой причине ЭТ известного ДИДРЛ в ряде случаев оказывается недостаточной.
Таким образом, технической задачей изобретения является повышение эксплуатационной технологичности двухдиапазонного импульсно-доплеровского радиолокатора и его готовности к применению.
Одним из путей повышения ЭТ ДИДРЛ является использование встроенных средств, обеспечивающих сквозной контроль РЛ от его антенны до индикатора.
Поставленная техническая задача достигается тем, что в ДИДРЛ, содержащий генератор ОЗЧ, микроволновые первый и второй ДППК, каждый из которых содержит антенну со встроенным устройством связи и дополнительным входом, соединенную с антенным плечом циркулятора, выход которого подключен к первому входу приемника, вход циркулятора присоединен к выходу передатчика, состоящего из соединенных между собой усилителя мощности и ЗГ, второй выход которого соединен со вторым входом приемника, выходы приемников первого и второго ДППК подключены соответственно к первому и второму информационным входам КС, выход которого является входом последовательно соединенных СД, АЦП, ПОС и индикатора, при этом второй выход ПОС соединен с первым входом ПД, первый, второй и третий выходы ПД соединены соответственно со вторым входом ПОС, управляющим входом КС и первым входом синхронизатора, первый, второй и третий выходы которого подключены соответственно к первым входам передатчиков первого и второго ДППК и второму входу СД, введены имитатор цели первого диапазона (ИЦПД), имитатор цели второго диапазона (ИЦВД) и имитатор сигналов ПЧ (ИСПЧ), причем КС выполнен трехпозиционным и снабжен третьим информационным входом, к которому подключен выход ИСПЧ, первый вход которого соединен с четвертым выходом ПД, выходы ИЦПД, ИЦВД подключены соответственно к дополнительным входам антенн первого и второго ДППК, первые входы ИЦПД и ИЦВД подключены соответственно к четвертому и пятому выходам синхронизатора, а вторые входы ИЦПД, ИЦВД, ИСПЧ, передатчиков первого и второго ДППК и синхронизатора соединены с выходом генератора ОЗЧ.
Кроме этого, ЭТ ДИДРЛ дополнительно повышается за счет того, что ИЦПД и ИЦВД выполняются конструктивно совмещенными с конструкциями ЗГ соответственно передатчиков первого и второго ДППК.
На фиг.1 изображена блок-схема предлагаемого ДИДРЛ, на фиг.2 — схема конструктивного совмещения ИЦПД (ИЦВД) с ЗГ передатчика первого (второго) ДППК.
Предлагаемый ДИДРЛ (фиг.1) содержит генератор 1 ОЗЧ, являющейся общей опорной задающей частотой, обеспечивающей когерентность сигналов микроволновых первого и второго ДППК, работающих, например, в диапазонах К и Х или К и S.
Первый ДППК содержит антенну 2 со встроенным устройством связи и дополнительным входом 3, циркулятор 4 (антенный переключатель), антенное плечо которого связано с антенной 2, а его выход соединен с первым входом приемника 5. Вход циркулятора 4 соединен с выходом передатчика 6, состоящего из соединенных между собой усилителя 7 мощности и задающего генератора 8. Второй выход ЗГ 8 соединен со вторым входом приемника 5.
Второй ДППК содержит аналогичным образом соединенные антенну 9 со встроенным устройством связи и дополнительным входом 10, циркулятор 11, приемник 12, передатчик 13 с усилителем 14 мощности и ЗГ 15.
Передатчики 6 и 13 имеют первые и вторые входы, предназначенные соответственно для ввода импульсов запуска передатчиков (ИЗП) и сигналов генератора 1 ОЗЧ. В усилителе 7 (14) мощности ИЗП определяют время работы последнего в режиме усиления мощности, а ОЗЧ используется в ЗГ 8 (15) для формирования несущей частоты передатчиков и опорных сигналов приемников ДППК РЛ.
Выходы приемников 5 и 12 на одинаковой ПЧ подключены соответственно к первому и второму информационным входам коммутатора 16 сигналов. Выход КС 16 является входом последовательно соединенных синхронного детектора 17, аналого-цифрового преобразователя 18, процессора 19 обработки сигналов и индикатора 20.
Для управления работой РЛ предусмотрен процессор 21 данных. Его первый вход соединен со вторым выходом ПОС 19, предназначенным для выдачи цифровой информации об обработанных сигналах цели, а первый, второй и третий выходы ПД 21 соединены соответственно со вторым входом ПОС 19, управляющим входом КС 16 и первым входом синхронизатора 22 для управления ими. Связи ПД 21 с перечисленными устройствами осуществляются с использованием стандартных интерфейсов преимущественно параллельного обмена.
Синхронизатор 22 содержит устройства, формирующие ИЗП и импульсы запуска имитаторов цели (ИЗИЦ), а также формирует опорный сигнал для синхронного детектирования. Первый и второй выходы синхронизатора 22 (с ИЗП) подключены соответственно к первому входу передатчика 6 и первому входу передатчика 13, третий выход синхронизатора 22 (с опорным сигналом) подключен к второму входу СД 17, а четвертый и пятый выходы синхронизатора 22 (с ИЗИЦ) подключены соответственно с первому входу имитатора 23 цели первого диапазона и имитатора 24 цели второго диапазона.
Для имитации сигналов ПЧ предусмотрен имитатор 25 сигналов ПЧ, первый вход которого (управляющий) соединен с четвертым выходом ПД 21, обеспечивающим его включение-выключение в режиме использования. Выход ИСПЧ 25 соединен с третьим информационным входом КС 16, который выполнен трехпозиционным. Одной позиции КС 16 соответствует подключение к СД 17 выхода на ПЧ приемника 5, другой — выхода на ПЧ приемника 13, третий — выхода ИСПЧ 25.
Выходы ИЦПД 23 и ИЦВД 24 соединены соответственно с дополнительными входами 3 и 10 антенн 2 и 9. (Последние снабжены приводами, на чертеже не показанными.)
Выход генератора 1 ОЗЧ соединен со вторыми входами, предназначенными для ввода ОЗЧ: синхронизатора 22, передатчиков 6, 13, ИЦПД 23, ИЦВД 24, ИСПЧ 25.
ИЦПД (ИЦВД) может быть совмещен механически в конструкции 26 (фиг.2) с конструкцией ЗГ передатчика первого (второго) ДППК без изменения приведенных выше связей.
В режиме прямого применения работа предлагаемого ДИДРЛ не имеет существенных отличий от работы прототипа, описанного выше.
В режиме подготовки к применению (действию) работа предлагаемого ДИДРЛ осуществляется следующим образом.
Генератор 1 вырабатывает высокостабильную ОЗЧ, которая кроме передатчика 6 с ЗГ 8, передатчика 13 с ЗГ 15 и синхронизатора 22 поступает также в ИЦПД 23, ИЦВД 24 и ИСПЧ 25.
В синхронизаторе 22 ОЗЧ путем ее деления используется для формирования ИЗП для передатчиков первого и второго ДППК и ИЗИЦ (в интервалах между ИЗП) для ИЦПД 23 и ИЦВД 24. В синхронизаторе 22 путем умножения ОЗЧ формируется опорный сигнал для СД 17.
В ИЦПД 23 и ИЦВД 24 путем умножения ОЗЧ формируются частоты имитируемых целей, отличающиеся от несущих частот передатчиков первого и второго ДППК на определенный доплеровский сдвиг частоты для первого и второго диапазонов РЛ. Во время поступления ИЗИЦ на выходах указанных имитаторов появляются импульсные сигналы с микроволновым заполнением и доплеровским сдвигом частоты цели, которые вводятся во встроенные в антенны 2 и 9 устройства связи через дополнительные входы 3 и 10. Далее через устройства первого или второго ДППК сигналы соответственно ИЦПД 23 или ИЦВД 24 проходят через КС 16, СД 17, АЦП 18, ПОС 19 и в виде соответствующих отметок поступают на вход индикатора 20. Этим обеспечивается сквозной контроль (СК) РЛ от антенны до индикатора. СК выполняется поочередно: сначала для одного, а затем для другого диапазона. Включение ИЦПД 23 и ИЦВД 24 происходит за счет поступления ИЗИЦ из синхронизатора 22, управляемого командами от ПД 21. СК возможен и при работе передатчиков первого или второго ДППК, когда в интервалах между ИЗП в имитаторы цели поступают ИЗИЦ. Оценка результатов СК производится по отметкам цели на индикаторе 20.
При отрицательном результате СК используется ИСПЧ 25. В нем ОЗЧ умножается до значения ПЧ, соответствующей ПЧ на выходах приемников 5 и 12. Подключение ИСПЧ 25 к СД 17 производится через третью позицию КС 16, которая задействуется командой с второго выхода ПД 21, с четвертого выхода которого включается умножитель ОЗЧ в ИСПЧ 25. Этим обеспечивается частичный СК общего тракта синхронного детектирования и выделения сигналов цели.
По соображениям производственной технологичности и ЭТ предлагается конструктивное совмещение ИЦПД (ИЦВД) с конструкцией ЗГ передатчика первого (второго) ДППК в виде конструкции 26 (фиг.2), которая более удобна для изготовления и эксплуатации ДППК предлагаемого ДИДРЛ. Схемо-конструктивное выполнение большинства устройств и блоков предложенного ДИДРЛ достаточно подробно описано в общедоступной технической литературе и дополнительных пояснений для специалиста не требует. (Справочник по радиолокации. Под ред. М. Сколника. Пер. с английского (в 4-х томах) под общ. ред. К.Н.Трофимова. Том III. Радиолокационные устройства. М., «Сов. радио», 1979 г. (РЛ передатчики: с.с.7-127, РЛ приемники: с.с.135-195, РЛ индикаторы: с.с.197-232, импульсно-доплеровские РЛС: с.с.363-399. М.С.Куприянов, Б.Д.Матюшкин. Цифровая обработка сигналов: процессоры, алгоритмы, средства проектирования. СПб. Политехника, 1999 — 592 с ил. Б.М.Качан. Электронные вычислительные машины и системы. Учебное пособие для ВУЗов. — М., Энергоатомиздат, 1991. — 592 с.)
Антенны первого и второго ДППК в зависимости от задач, решаемых объектом размещения ДИДРЛ, могут быть объединены общей антенной колонкой, либо выполнены в виде одной двухдиапазонной антенны, что существо заявки не изменяет. Один из вариантов встроенного устройства связи описан в источнике: Устройство ввода СВЧ сигналов имитатора цели и помех в составе бортовой РЛС. Патент РФ №2207587 с приоритетом от 13.04.2000 г. Заявитель ОАО «Корпорация «Фазотрон — НИИР».
Имитаторы цели и сигналов ПЧ (ИЦПД, ИЦВД, ИСПЧ), кроме общих вариантов, приведенных в настоящем описании, могут быть выполнены с использованием материалов, указанных в источнике: Способ имитации цели и ее имитатор в импульсно-доплеровской РЛС’ (варианты). Патент РФ №2234107 с приоритетом от 20.12.2002 г. Заявитель: ОАО «Корпорация «Фазотрон — НИИР».
В результате использования изобретения существенно повышается ЭТ ДИДРЛ на этапе его подготовки к применению или восстановления, а также обеспечивается возможность повышения его ЭТ и в режиме применения.
1. Двухдиапазонный импульсно-доплеровский радиолокатор, содержащий генератор опорной задающей частоты, микроволновые первый и второй диапазонные приемно-передающие каналы (ДППК), каждый из которых содержит антенну со встроенным устройством связи и дополнительным входом, соединенную с антенным плечом циркулятора, выход которого подключен к первому входу приемника, вход циркулятора присоединен к выходу передатчика, состоящего из соединенных между собой усилителя мощности и задающего генератора, второй выход которого соединен со вторым входом приемника, выходы приемников первого и второго ДППК подключены соответственно к первому и второму информационным входам коммутатора сигналов, выход которого является входом последовательно соединенных синхронного детектора, аналого-цифрового преобразователя, процессора обработки сигналов (ПОС) и индикатора, при этом второй выход ПОС соединен с первым входом процессора данных, первый, второй и третий выходы которого соединены соответственно со вторым входом ПОС, управляющим входом коммутатора сигналов и первым входом синхронизатора, первый, второй и третий выходы которого подключены соответственно к первым входам передатчиков первого и второго ДППК и к второму входу синхронного детектора, отличающийся тем, что введены имитатор цели первого диапазона (ИЦПД), имитатор цели второго диапазона (ИЦВД) и имитатор сигналов промежуточной частоты (ИСПЧ), а коммутатор сигналов выполнен трехпозиционным и снабжен третьим информационным входом, к которому подключен выход ИСПЧ, первый вход которого соединен с четвертым выходом процессора данных, выходы ИЦПД и ИЦВД подключены соответственно к дополнительным входам антенн первого и второго ДППК, первые входы ИЦПД и ИЦВД подключены соответственно к четвертому и пятому выходам синхронизатора, а вторые входы ИЦПД, ИЦВД, ИСПЧ, передатчиков первого и второго ДППК и синхронизатора соединены с выходом генератора опорной задающей частоты.
2. Радиолокатор по п.1, отличающийся тем, что ИЦПД и ИЦВД выполнены конструктивно совмещенными с конструкциями задающих генераторов соответственно передатчиков первого и второго ДППК.
www.findpatent.ru
Методы и устройства обработки сигналов в импульсно-доплеровских радиолокационных станциях: Учебное пособие, страница 9
Временное положение стробов uстр1 и uстр3 жестко связано с положением строба uстр2.

Рис. 30
Сигналы с выходов селекторов поступают на смесители См1-См3 и далее на узкополосные фильтры Ф1-Ф3. Преобразование принимаемых сигналов в смесителях осуществляется для того, чтобы не менять настройку узкополосных фильтров при изменении доплеровского смещения частоты принимаемых сигналов, обусловленных взаимным перемещением цели и носителя РЛС.
Для этого на вторые входы смесителей поступает сигнал с управляющего гетеродина (рис. 29), частота которого меняется в соответствии с изменением доплеровского смещения цели. Расположение стробов показано на рис. 31.

Рис. 31
Строб uстр2 (рис. 31, б) выставляется приблизительно в центре частоты повторения, с периодом T1 (рис. 31, а), т.е. задержка uстр2 относительно зондирующих импульсов составляет. По центру строба uстр2 расположены соприкасающиеся между собой стробы uстр1 и uстр3 (рис.31, в). Расположение отраженного сигнала от цели относительно стробов uстр1 и uстр3 показано на рис. 31, д.
На выходах СД1 и СД3 величина отраженного сигнала будет пропорциональна площади совпадения отраженного со стробами uстр1, uстр3. При симметричном расположении сигнала относительно указанных стробов, величина ошибки Δτ=0. За счет перемещения цели по дальности отражений сигнал сместится относительно стробов uстр1 и uстр3 и появляется ошибка Δτ за счет разной величины совпадения площадей сигнала и стробов. Эта ошибка проявляется в разной амплитуде импульсов на выходах СД1 и СД3.
За счет узкой полосы пропускания фильтров сигнал на их выходе растягивается в непрерывное гармоническое колебание. Амплитуды этих колебаний пропорциональны степени перекрытия принимаемого радиоимпульса с соответствующим стробом дальности. Сигналы с выхода фильтров, подаются на детекторы (Д1-Д3), а затем на управляемые некогерентные накопители, назначение которых аналогично накопителям при автосопровождении по скорости. Дальнейшая обработка производится в ЦВМ, куда подаются сигналы в цифровом виде с трех каналов дальности.
Обработка заключается в том, что по величине Δτ в ЦВМ вырабатываются сигналы, с помощью которых в УРС перемещаются стробы дальности в сторону, уменьшающую величину Δτ. Следовательно, перемещение стробов uстр1; uстр2; uстр3 позволяет следить за положением сигнала от цели.
Как только uстр2 сместится от центра Fп с периодом T1 на определенную величину, что определяется по значению tDc, производится смена частоты повторения на новую, с периодом T2, при котором строб uстр2 вновь находится приблизительно в центре периода T2.
Таким образом, изменение частоты повторения и слежение за положением цели позволяет производить автосопровождение при неоднозначном отсчете дальности и наличии слепых дальностей.
Структурная схема импульсно-доплеровской РЛС
Структурная схема бортовой РЛС приведена на рис. 32.
На структурной схеме показано
взаимодействие основных узлов импульсно-доплеровской РЛС. Режимы работы синхронизатора
(С) задаются бортовой ЦВМ. Приемник с усилителем промежуточной частоты (УПЧ)
имеет как минимум два идентичных канала: дальномерный и угломерный. С
угломерного канала поступает информация об угловых координатах цели в режиме
обзора и автосопровождения. Информация с дальномерного канала служит для 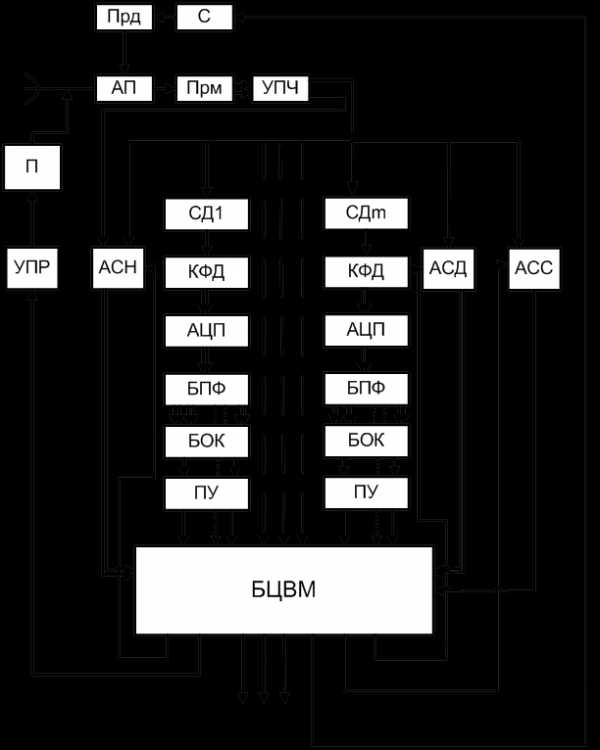
Рис. 32
обнаружения, измерения параметров цели в различных режимах.
Основная обработка производится в согласованном фильтре, состоящем из m временных каналов, каждый из m каналов состоит из селектора дальности (СД), квадратурных фазовых детекторов (КФД), АЦП, БПФ, блока объединения квадратур (БОК) и порогового устройства (ПУ). Двойной линией показана обработка в двух квадратурных каналах. Выходы ПУ, число которых определяется числом отраженных импульсов в пачке n, подключены к БЦВМ, где в соответствии с заложенными алгоритмами решаются задачи обнаружения, измерения параметров цели.
Системы автосопровождения по скорости (АСС), дальности (АСД), направлению (АСН) решают задачу сопровождения выбранной цели. Устройство управления (УПР) и привод (П) по информации с БЦВМ изменяют положение антенного устройства.
Перевод системы на автоматическое сопровождение цели осуществляется после режима обзора и захвата цели на автосопровождение.
Сканирование луча антенны можно осуществлять по строчному методу двумя циклами. Если четные и нечетные строки проходить лучом в противоположных направлениях, то частоту повторения от строки к строке можно менять с высокой на среднюю и наоборот. Циклы отличаются порядком изменения частоты повторения при переходе с четных на нечетные строки, так что за два цикла режимы ВЧП и СЧП используются для просмотра всего пространства, обеспечивая всеракурсное обнаружение целей.
Библиографический список
1. Бакулев П.А., Степин В.М. Методы и устройства селекции движущихся целей. М: Радио и связь, 1986. 286 с.
2. Справочник по радиолокации: Пер. с англ. Под ред. М.Сколника: В 4 т. Нью-Йорк, 1970.
3. Бакулев П.А. Радиолокационные системы. М: Радиотехника, 2004. 319 с.
4. Сосулин Ю.Г. Теоретические основы радиолокации и радионавигации: Учеб. пособие для вузов. М: Радио и связь, 1992. 304 с.
5. Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. М: Радио и связь 1981. 416 с.
6. . Основы системного проектирования радиолокационных систем и устройств: Метод. указания по курсовому проектированию/ Рязан. гос. радиотехн. акад.; Сост.: В.И. Кошелев, В.А. Федоров, Н.Д. Шестаков. Рязань, 1995. 60 с.
Оглавление
1. Введение………………………………………………………….3
2. Методы и алгоритмы обработки сигналов
на встречных курсах…………….………………………………..4
3. Оптимальная обработка сигналов
в импульсно-доплеровских РЛС………………………………………8
4. Методы и алгоритмы обработки сигналов
на догонных курах……………………………………………..13
5. Выбор зондирующих сигналов в бортовых РЛС……….………………………………………………………17
6. Обнаружение сигналов на фоне подстилающей
поверхности………….………………………………………….23
7. Измерение скорости цели в бортовых РЛС…………………………29
8. Измерение дальности цели в бортовых РЛС…….……………31
9. Автосопровождение цели в бортовых РЛС…………………………41
10. Структурная схема импульсно-доплеровской РЛС…………45
11. Библиографический список…………………………………47
vunivere.ru
вертолетная импульсно-доплеровская радиолокационная система — патент РФ 2191401
Предложение относится к радиотехнике и более конкретно к вертолетным импульсно-доплеровским радиолокационным системам (РЛС). Достигаемым техническим результатом является то, что предлагаемая РЛС обеспечивает существенный выигрыш по времени обнаружения высокоскоростных целей в круговой зоне, кроме того, повышается точность слежения за траекторией и скоростью движения цели. В отличие от известной РЛС, в предлагаемой системе дополнительно введены вторая антенна, вращение которой производят в круговой зоне по азимуту валом несущего винта вертолета, второй циркулятор, второй передатчик сигналов, второй приемник и коммутатор сигналов. Эта антенна приводит круговой обзор пространства синхронно с вращением несущего винта вертолета, совершая несколько оборотов в секунду. При этом коммутатор, управляемый от процессора данных, приоритетно подключается к выходу второго приемника, обеспечивая обнаружение целей. Первая антенна используется для уточнения координат обнаруженных целей, работая в секторном обзоре, выбираемом в соответствии с координатами и скоростью обнаруженной цели. 3 ил. Предложение относится к радиотехнике и более конкретно к вертолетным импульсно-доплеровским радиолокационным системам (РЛС). Известны импульсные некогерентные РЛС кругового или секторного обзора (см., например, Радиотехнические системы / Под ред. проф. Ю.М. Казаринова. — М. : Высшая школа, 1990, с.194-197), позволяющие обнаруживать цели и определять их дальность D и азимут в пределах зоны обзора, ограниченной максимальной дальностью и шириной диаграммы направленности антенны в вертикальной плоскости. По азимуту антенна вращается с постоянной скоростью, производя за время одного оборота круговой обзор. Принимаемые отраженные сигналы воспроизводятся на экране индикатора кругового обзора, развертка которого вращается синхронно с вращением антенны. Момент излучения зондирующего импульса антенной определяет начало развертки по дальности, а азимутальное положение развертки совмещается с положением оси луча антенны. Отраженным от цели сигналом после обработки и усиления подсвечивают точку развертки на индикаторе, соответствующую координатам цели. Отраженные сигналы принимаются, пока цель остается в пределах луча антенны по азимуту аз. Согласованная во времени работа всех элементов РЛС обеспечивается синхронизатором, состоящим из задающего генератора, стабильные колебания которого используются для формирования импульсов запуска передатчика и развертки дальности. Через циркулятор (антенный переключатель), защищающий вход приемника на время передачи импульсов, формируемых передатчиком, высокочастотные колебания посылаются в антенну и излучаются ею в направлении цели. Принятые антенной отраженные от цели сигналы, пройдя через циркулятор, усиливаются и детектируются в приемнике и в виде импульсов поступают на индикатор для отображения метки цели, а также с помощью устройства первичной обработки фильтруются от помех и после измерения и преобразования в цифровую форму азимута и дальности цели передаются в ЭВМ для вторичной обработки, состоящей в построении траектории движения цели по отметкам (отсчетам), полученным при нескольких последовательных обзорах, т.е. за несколько оборотов антенны. Недостатками таких РЛС являются, во-первых, большое время получения первого отсчета координат цели, вошедшей в зону обзора РЛС, т.е. большое время обнаружения новой цели, что имеет особо важное значение при обнаружении высокоскоростных целей из-за возможности их пропуска, во-вторых, недостаточная точность слежения за траекторией и скоростью движения целей особенно при их маневрировании. Основным фактором, от которого зависит время обнаружения цели, является период обзора РЛС, минимальная величина которого определяется дальностью действия и характеристиками обнаружения РЛС и составляет 5-10 с при круговом обзоре. Уменьшение периода обзора возможно путем использования секторного обзора, однако при этом невозможно контролировать пространство вне этого сектора, что в большинстве случаев недопустимо. Основными факторами, влияющими на точность слежения за траекторией и скоростью движения целей, являются, во-первых, количество и точность измеряемых радиолокационной системой пространственных параметров движения цели непосредственно при проведении отсчета, таких как координаты и скорость цели, во-вторых, темп обновления этой информации, определяемый периодом обзора РЛС. В указанных РЛС невозможно определение параметров движения цели по одной ей отметке, так как в момент получения отметки измеряются только координаты местоположения (азимут, дальность) цели. Для обеспечения слежения за движением цели используется несколько последовательных во времени отсчетов координат, по которым оценивается траектория и скорость движения цели. Недостаток, связанный с недостаточной точностью слежения за траекторией движения и скоростью цели, частично устраняется в известной вертолетной импульсно-доплеровской РЛС «Лонгбоу» фирмы Локхид Мартин за счет увеличения числа одновременно измеряемых РЛС параметров движения цели, а именно дополнительным измерением радиальной скорости цели одновременно с измерением ее координат. Эта РЛС предназначена для вертолета AH-64D Longbow Apache (рекламный проспект Longbow System Description, фирма Lockheed Martin, 1995) и содержит антенну, соединенную с циркулятором, выход которого связан с первым входом приемника, а вход с выходом передатчика, вход которого подключен к первому выходу синхронизатора, второй выход синхронизатора соединен со вторым входом приемника, выход приемника соединен через последовательно соединенные синхронный детектор и аналого-цифровой преобразователь с процессором обработки сигналов, первый и второй выходы которого соединены соответственно с индикатором и со входом процессора данных, выходы которого соединены соответственно со вторым входом процессора обработки сигналов, входом синхронизатора и с комплексом бортового радиоэлектронного оборудования вертолета, а третий выход синхронизатора соединен со вторым входом синхронного детектора. Антенна такой РЛС вращается по азимуту, производя круговой или секторный обзор, при этом за один обзор рабочего сектора происходит обнаружение целей и определение их дальности, азимута и радиальной скорости. Синхронизатор С обеспечивает согласованную работу составных частей РЛС (фиг. 1). Он содержит задающий генератор и схемы формирования высокостабильных колебаний миллиметрового диапазона волн для запуска передатчика импульсных когерентных сигналов (ПРД), а также опорных сигналов для приемника (ПРМ) и синхронного детектора (СД). С выхода передатчика (ПРД) высокочастотные колебания через циркулятор (Ц) подаются в антенну (А) и излучаются через нее. Момент излучения зондирующего импульса при каждом положении антенны определяет начало шкалы отсчета дальности. Отраженные от цели сигналы принимаются антенной и через циркулятор подаются на вход приемника (ПРМ), усиливаются и передаются в синхронный детектор (СД), откуда они после детектирования поступают в аналого-цифровой преобразователь (АЦП), с выхода которого они в цифровом виде поступают на процессор обработки сигналов (ПОС), где производится их цифровая обработка и подготовка к виду, удобному для отображения на индикаторе (И). С другого выхода процессора обработки сигналов цифровые данные о параметрах цели, полученные в каждом обзоре, передаются в процессор данных (ПД) для слежения за трассами их движения по нескольким периодам обзора. Процессор данных управляет работой синхронизатора и процессора обработки сигналов в различных режимах работы РЛС, а также обеспечивает информационные связи РЛС с комплексом (К) бортового радиоэлектронного оборудования вертолета. По величине доплеровского сдвига принятого сигнала определяется радиальная скорость движущейся цели по результатам одного отсчета, что дает выигрыш по сравнению с некогерентными РЛС. Существенными недостатками известной системы является большое время обнаружения новых целей и недостаточная точность слежения за траекторией и скоростью движения целей, что связано с малой скоростью обзора пространства. В результате этого цели, летящие с высокой скоростью и находящиеся в зоне обзора РЛС малое время могут быть не обнаружены, а слежение за обнаруженными целями происходит с недостаточной точностью. Поясним это более подробно. Основным режимом работы такой РЛС является совмещенный режим работы по наземным и по воздушным целям. Для повышения точности определения координат целей в условиях жестких ограничений на размеры антенны в известной РЛС применяется миллиметровый диапазон волн, обеспечивающий ширину луча антенны аз около 0.5o. Для работы по подвижным целям время накопления н отраженного сигнала по каждому элементу разрешения при проведении доплеровских измерений даже при параллельной обработке отраженных сигналов по дальности будет обратно пропорционально разрешающей способности РЛС по частоте Доплера fд в процессоре обработки сигналов, которая, в свою очередь, прямо пропорциональна произведению значения удвоенной разрешающей способности РЛС по радиальной скорости цели vr на значение несущей частоты зондирующего сигнала f0 и обратно пропорционально скорости света. Кроме того, н ограничено временем радиолокационного контакта с целью, т.е. временем прохождения луча антенны через цель. При vr = 1 м/c, fo=35 ГГц получаем н не менее 0,004 с, что ограничивает угловую скорость просмотра пространства по азимуту аз значением, не превышающимаз = аз/н = 0,5/0,004 = 78/c.
Следовательно, время просмотра одной строки в секторе обзора 90o составляет не менее 1,15 с, а в круговой зоне — не менее 4.6 с. При многострочном обзоре пространства время обзора значительно больше, т.к. оно прямо пропорционально количеству строк. При такой большой дискретности обзора пространства качество контроля высокоскоростных воздушных целей в пространстве, окружающем вертолет, недостаточно. Вследствие этого известная РЛС находит практическое применение только для работы по неподвижным или малоскоростным целям. Задачей изобретения является уменьшение времени получения первого отсчета координат цели, вошедшей в зону обзора РЛС, и повышение точности слежения за траекторией и скоростью движения целей. Эта задача решается тем, что в состав предлагаемой вертолетной импульсно-доплеровской РЛС дополнительно введены: вторая антенна, вращение которой производят в круговой зоне по азимуту валом несущего винта вертолета и которая соединена с антенным плечом второго введенного циркулятора, вход которого подключен к выходу второго введенного передатчика, вход которого подсоединен к четвертому выходу синхронизатора, и коммутатор сигналов, первый вход которого подключен к выходу первого приемника, второй вход — к четвертому выходу процессора данных, а выход — ко входу синхронного детектора, а также второй приемник, вход которого подключен к выходу второго циркулятора, выход — к третьему входу коммутатора сигналов, а пятый выход синхронизатора соединен со вторым входом второго приемника. На фиг.1 представлена блок-схема устройства прототипа. На фиг. 2 представлена блок-схема предлагаемой импульсно-доплеровской РЛС. На фиг.3 представлена схема расположения второй антенны на валу несущего винта вертолета. Радиолокационная система (фиг.2) содержит первую антенну 1, соединенную с антенным плечом первого циркулятора 2, выход которого связан с первым входом первого приемника 3. Вход первого циркулятора соединен с выходом первого передатчика 4, вход которого подключен к первому выходу синхронизатора 5, по которому в передатчик 4 подаются сигналы запуска. Второй выход синхронизатора, по которому передается опорный сигнал гетеродина, соединен со вторым входом первого приемника. Выход первого приемника соединен через первый коммутируемый вход дополнительно введенного коммутатора сигналов 6 к последовательно соединенным синхронному детектору 7 и аналого-цифровому преобразователю 8, выход которого соединен с первым входом процессора обработки сигналов 9. По третьему выходу синхронизатора 5, соединенному со вторым входом синхронного детектора 7, подается опорный сигнал для синхронного детектирования. Первый и второй выходы процессора обработки сигналов 9 соединены соответственно с индикатором 10 и со входом процессора данных 11. По первому выходу процессора данных 11, соединенному со вторым входом процессора обработки сигналов 9, передаются сигналы управления процессором обработки сигналов 9. По второму выходу процессора данных 11, соединенному с синхронизатором 5, передаются сигналы управления синхронизатором 5. По третьему выходу процессора данных 11, соединенному с комплексом бортового радиоэлектронного оборудования вертолета, передаются данные о координатах и скорости обнаруженных и отслеживаемых радиолокационной системой целях. По четвертому выходу процессора данных 11, соединенному со вторым входом коммутатора сигналов 6, передаются сигналы управления коммутатором. РЛС также содержит дополнительно введенные: вторую антенну 12, второй циркулятор 13, второй передатчик 14 и второй приемник 15. Вторая антенна соединена с антенным плечом второго циркулятора, вход которого подключен к выходу второго передатчика, вход которого подсоединен к четвертому выходу синхронизатора 5. По четвертому выходу синхронизатора 5 подаются сигналы запуска второго передатчика 14. Первый вход второго приемника подключен к выходу второго циркулятора, а выход — к третьему входу коммутатора сигналов 6, который также как и первый вход коммутатора является коммутируемым. По пятому выходу синхронизатора 5, соединенному со вторым входом второго приемника 15, передается опорный сигнал гетеродина. Антенна 12 (фиг. 3) содержит неподвижный облучатель параболического зеркала, например, электромагнитный вибратор, закрепленный на верхнем конце неподвижной центральной полой штанги, вокруг которой происходит вращение вала с закрепленными на нем лопастями несущего винта вертолета. Этот облучатель установлен в фокусе зеркала антенны 12, которое жестко связано с фланцем вала несущего винта и вращается вместе с ним вокруг центральной неподвижной штанги. Неподвижный облучатель электрически соединен с фидером, который располагается в полости центральной штанги, и другим концом подключен к циркулятору Ц2, который установлен в фюзеляже вертолета. По этому фидеру производится передача зондирующих сигналов от циркулятора Ц2 к антенне 12 и передача принятых антенной 12 эхо-сигналов к циркулятору Ц2. Облучатель и зеркало антенны обеспечивают формирование луча антенны 12 как на передачу, так и на прием сигналов. Антенна 12 размещается под радиопрозрачным обтекателем, который также закреплен на фланце вала несущего винта и обеспечивает защиту антенны от воздействий атмосферы и потока воздуха при движении вертолета. Предлагаемая импульсно-доплеровская РЛС работает следующим образом. Вторая антенна совершает круговой обзор пространства синхронно с вращением несущего винта вертолета, совершая несколько оборотов в секунду. Синхронизатор 5 обеспечивает согласованную работу составных частей РЛС. Управление синхронизатором производится по его входу процессором данных 11 через второй выход. Синхронизатор формирует высокостабильные импульсные сигналы с высокочастотным заполнением для запуска второго передатчика 14, а также высокостабильные опорные сигналы для первого приемника 3, второго приемника 15 и синхронного детектора 7. Сформированные синхронизатором 5 высокочастотные колебания усиливаются вторым передатчиком 14 проходят через второй циркулятор 13 во вторую антенну 12 и излучаются ею. Отраженные от цели сигналы принимаются второй антенной и через второй циркулятор передаются на вход второго приемника 15, откуда они после преобразования на промежуточную частоту и усиления передаются на третий вход коммутатора сигналов 6. Управление коммутатором производится по второму входу от процессора данных 11 через четвертый выход. При работе в этом режиме коммутатор соединяет первый вход синхронного детектора с выходом второго приемника 15, поэтому сигналы с выхода приемника 15 поступают на вход синхронного детектора 7. Далее эхо-сигналы детектируются и поступают в аналого-цифровой преобразователь 8, где производится их преобразование в цифровую форму и выдача в процессор обработки сигналов 9. В процессоре обработки сигналов 9 производится их накопление, свертка, пороговая обработка, а также дальномерные и доплеровские измерения с привязкой к угловому положению луча антенны при прохождении его через цель, в результате которых определяются координаты и радиальная скорость цели при каждом обороте (периоде обзора) антенны 12. Кроме того, в процессоре обработки сигналов 9 формируется видеоинформация, предназначенная для отображения на индикаторе 10 в каждом периоде обзора антенны 12. С другого выхода процессора обработки сигналов цифровые данные о параметрах цели, полученные в каждом периоде обзора, передаются в процессор данных 11, где по нескольким периодам обзора производится завязка трассы цели, уточняются ее координаты и скорость, данная цель берется на автоматическое сопровождение по координатам и скорости. Процессор данных 11 управляет работой синхронизатора и процессора обработки сигналов в различных режимах работы РЛС, а также обеспечивает информационную связь РЛС с комплексом К бортового радиоэлектронного оборудования вертолета, куда в качестве целеуказания передаются полученные данные о текущем местоположении и скорости обнаруженной цели. Кроме того, используя координаты цели, он формирует целеуказания для антенны 1, которые содержат данные о начале и конце углового сектора, по получении которых луч антенны 1, переводится в область пространства, где находится обнаруженная цель и включается режим сканирования антенны 1 и поиска указанной ей цели. Размеры углового сектора сканирования антенны 1 могут быть ограничены шириной луча антенны 12. Одновременно с этим процессор данных 11 подключает через коммутатор сигналов 6 выход приемника 3 к синхронному детектору 7. При этом формирование синхронизатором 5 высокочастотных колебаний для передатчика 14 прекращается и начинают формироваться высокочастотные колебания для передатчика 4, которые усиливаются им, проходят через первый циркулятор 2 и излучаются в пространство антенной 1. Отраженные от цели сигналы принимаются антенной 1 и через циркулятор 2 подаются на вход приемника 3, где они преобразуются на промежуточную частоту, усиливаются и передаются на первый вход коммутатора сигналов 6. Далее обработка эхо-сигналов, принятых антенной 1, происходит аналогично обработке эхо-сигналов, принятых антенной 12. В результате этого процесса происходит более точный отсчет угловых координат цели, уже находящейся на сопровождении, причем сектор сканирования антенны 1, обеспечивающий слежение за целью, взятой на сопровождение антенной 12, существенно меньше по сравнению с сектором поиска, который используется в прототипе, что значительно увеличивает темп обновления информации о координатах и скорости цели при слежении за ней с использованием антенны 1. После получения точных координат и скорости цели РЛС переходит в режим циклической работы с использованием антенн 1 и 12. Циклограмма работы антенн, синхронизатора и коммутатора сигналов задается процессором данных 11, например, для обнаружения цели каждую секунду может выделяться 4 периода обзора антенны 12, а остальное время — для уточнения текущих координат и скорости цели с использованием антенны 1. Ширина сектора сканирования для антенны 1 определяется шириной луча антенны 12a12, которая при сохранении в РЛС равенства времени накопления эхо-сигналов, принимаемых антеннами 1 и 12, прямо пропорциональна произведению ширины луча антенны 1a1 на отношение угловых скоростей движения антенн по зоне обзора a12/a1. Угловая скорость антенны 12 больше, чем у антенны 1, поэтому луч антенны 12a12 должен быть шире луча антенны 1a1. Например, при a1 = 0,5, a1 = 78/c и a12 = 1800/c (5 оборотов в секунду) имеем a12 = 11,5.
В предлагаемой системе:
обнаружение и определение координат и радиальной скорости воздушной цели в круговой зоне по азимуту с помощью антенны 12 происходит за один цикл обзора антенны 12, т.е. за один оборот несущего винта вертолета, который для современных вертолетов составляет около 0,2 с;
время взятия цели на сопровождение по информации, получаемой антенной 12, равно 2-3 циклам обзора, т.е. составляет 0,4-0,6 с, причем за это время происходит наведение и антенны 1 на ту же цель, а период сканирования антенной 1 сектора обзора, где находится цель, шириной 15o составляет около 0,2 с. Таким образом, предлагаемое техническое решение обеспечивает существенный выигрыш по времени обнаружения. Кроме того, обеспечивается и повышение точности слежения за траекторией и скоростью движения цели за счет повышения темпа обновления информации о пространственном положении цели.
ФОРМУЛА ИЗОБРЕТЕНИЯ
Вертолетная импульсно-доплеровская радиолокационная система, содержащая первую антенну, соединенную с антенным плечом первого циркулятора, выход которого связан с первым входом первого приемника, вход первого циркулятора соединен с выходом первого передатчика, вход которого подключен к первому выходу синхронизатора, второй выход синхронизатора соединен со вторым входом первого приемника, выход которого соединен через последовательно соединенные синхронный детектор и аналого-цифровой преобразователь с процессором обработки сигналов, первый и второй выходы которого соединены соответственно с индикатором и со входом процессора данных, первый, второй и третий выходы которого соединены соответственно со вторым входом процессора обработки сигналов, входом синхронизатора и с комплексом бортового радиоэлектронного оборудования вертолета, а третий выход синхронизатора соединен со вторым входом синхронного детектора, отличающаяся тем, что в нее дополнительно введены вторая антенна, вращение которой производят в круговой зоне по азимуту валом несущего винта вертолета, соединенная с антенным плечом второго введенного циркулятора, вход которого подключен к выходу второго введенного передатчика, вход которого подсоединен к четвертому выходу синхронизатора, и коммутатор сигналов, первый вход которого подключен к выходу первого приемника, второй вход — к четвертому выходу процессора данных, а выход — ко входу синхронного детектора, а также второй приемник, вход которого подключен к выходу второго циркулятора, выход — к третьему входу коммутатора сигналов, а пятый выход синхронизатора соединен со вторым входом второго приемника.www.freepatent.ru
Радиолокатор — это… Что такое Радиолокатор?
Радиолокационная станция (РЛС) или рада́р (англ. radar от Radio Detection and Ranging — радиообнаружение и дальнометрия) — система для обнаружения воздушных, морских и наземных объектов, а также для определения их дальности и геометрических параметров. Использует метод, основанный на излучении радиоволн и регистрации их отражений от объектов. Английский термин-акроним появился в 1941 г., впоследствии в его написании прописные буквы были заменены строчными.
История
В 1887 году немецкий физик Генрих Герц начал эксперименты, в ходе которых он открыл существование электромагнитных волн, предсказанных теорией Джеймса Максвелла. Герц научился генерировать и улавливать электромагнитные радиоволны и обнаружил, что они по-разному поглощаются и отражаются различными материалами.
Одно из первых устройств, предназначенных для радиолокации воздушных объектов продемонстрировал 26 февраля 1935 г. шотландский физик Роберт Ватсон-Ватт, который примерно за год до этого получил первый патент на изобретение подобной системы.
Россия
В Советском Союзе осознание необходимости средств обнаружения авиации, свободных от недостатков звукового и оптического наблюдения, привела к разворачиванию исследований в области радиолокации. Идея, предложенная молодым артиллеристом Павлом Ощепковым получила одобрение высшего командования: наркома обороны СССР К. Е. Ворошилова и его заместителя — М. Н. Тухачевского.
3 января 1934 года в СССР был успешно проведён эксперимент по обнаружению самолёта радиолокационным методом. Самолёт, летящий на высоте 150 метров был обнаружен на дальности 600 метров от радарной установки. Эксперимент был организован представителями Ленинградского Института Электротехники и Центральной Радиолаборатории. В 1934 году маршал Тухачевский в письме правительству СССР написал: «Опыты по обнаружению самолётов с помощью электромагнитного луча подтвердили правильность положенного в основу принципа». Первая опытная установка «Рапид» была опробована в том же же году[1][2], в 1936 году советская сантиметровая радиолокационная станция «Буря» засекала самолёт с расстояния 10 километров[1][3]. В США первый контракт военных с промышленностью был заключён в 1939 году. В 1946 году американские специалисты — Реймонд и Хачертон, бывший сотрудник посольства США в Москве, написали: «Советские учёные успешно разработали теорию радара за несколько лет до того, как радар был изобретён в Англии».[4]
Классификация радаров
По предназначению радиолокационные станции можно классифицировать следующим образом:
- РЛС обнаружения;
- РЛС управления и слежения;
- Панорамные РЛС;
- РЛС бокового обзора;
- Метеорологические РЛС.
По сфере применения различают военные и гражданские РЛС.
По характеру носителя:
- Наземные РЛС
- Морские РЛС
- Бортовые РЛС
По типу действия
- Первичные или пассивные
- Вторичные или активные
- Совмещённые
По диапазону волн:
- Метровые
- Сантиметровые
- Миллиметровые
Устройство и принцип действия Первичного радиолокатора
Первичный (пассивный) радиолокатор, в основном, служит для обнаружения целей, освещая их электромагнитной волной и затем принимая отражения (эхо) этой волны от цели. Поскольку скорость электромагнитных волн постоянна (скорость света), становится возможным определить расстояние до цели, основываясь на измерении времени распространения сигнала.
В основе устройства радиолокационной станции лежат три компонента: передатчик, антенна и приёмник.
Передающее устройство является источником электромагнитного сигнала высокой мощности. Он может представлять из себя мощный импульсный генератор. Для импульсных РЛС сантиметрового диапазона — обычно магнетрон или импульсный генератор работающий по схеме: задающий генератор — мощный усилитель, использующий в качестве генератора чаще всего лампу бегущей волны, а для РЛС метрового диапазона, часто используют — триодную лампу. В зависимости от конструкции, передатчик работает либо в импульсном режиме, формируя повторяющиеся короткие мощные электромагнитные импульсы, либо излучает непрерывный электромагнитный сигнал.
Антенна выполняет фокусировку сигнала приёмника и формирование диаграммы направленности, а также приём отражённого от цели сигнала и передачу этого сигнала в приёмник. В зависимости от реализации приём отражённого сигнала может осуществляться либо той же самой антенной, либо другой, которая иногда может располагаться на значительном расстоянии от передающего устройства. В случае, если передача и приём совмещены в одной антенне, эти два действия выполняются поочерёдно, а чтобы мощный сигнал, просачивающийся от передающего передатчика в приёмник не ослепил приёмник слабого эха, перед приёмником размещают специальное устройство, закрывающее вход приёмника в момент излучения зондирующего сигнала.
Приёмное устройство выполняет усиление и обработку принятого сигнала. В самом простом случае результирующий сигнал подаётся на лучевую трубку (экран), которая показывает изображение, синхронизированное с движением антенны.
Когерентные РЛС
Когерентный метод радиолокации основан на выделении и анализе разности фаз отправленного и отражённого сигналов, которая возникает из-за эффекта Доплера, когда сигнал отражается от движущегося объекта. При этом передающее устройство может работать как непрерывно, так и в импульсном режиме. Основным преимуществом данного метода является то, что он «позволяет наблюдать только движущиеся объекты, а это исключает помехи от неподвижных предметов, расположенных между приёмной аппаратурой и целью или за ней.»[5]
Импульсные РЛС
Принцип действия импульсного радара
Принцип определения расстояния до объекта с помощью импульсного радара
Современные радары сопровождения построены как импульсные радары. Импульсный радар передаёт только в течение очень краткого времени, короткий импульс обычно приблизительно микросекунда в продолжительности, после чего он слушает эхо, в то время как импульс распространяется.
Поскольку импульс уходит далеко от радара с постоянной скоростью, время прошедшее с момента, когда импульс посылали, ко времени когда эхо получено, — ясная мера прямого расстояния до цели. Следующий импульс можно послать только через некоторое время, а именно после того как импульс придёт обратно, это зависит от дальности обнаружения радара (данным мощностью передатчика, усилением антенны и чувствительностью приёмника). Если бы импульс посылали раньше, то эхо предыдущего импульса от отдалённой цели могло бы быть перепутано с эхом второго импульса от близкой цели.
Промежуток времени между импульсами называют интервалом повторения импульса, обратная к нему величина — важный параметр, который называют частотой повторения импульса (ЧПИ) . Радары низкой частоты дальнего обзора, обычно имеют интервал повторения в несколько сотен импульсов в секунду (или Герц [Гц]). Частота повторения импульсов является одним из отличительных признаков, по которым возможно дистанционное определение модели РЛС.
Устранение пассивных помех
Одной из основных проблем импульсных РЛС является избавление от сигнала, отражающегося от неподвижных объектов: земной поверхности, высоких холмов и т. п. Если к примеру, самолёт находится на фоне высокого холма, отражённый сигнал от этого холма полностью перекроет сигнал от самолёта. Для наземных РЛС эта проблема проявляется при работе с низколетящими объектами. Для бортовых импульсных РЛС она выражается в том, что отражение от земной поверхности затеняет все объекты, лежащие ниже самолёта с радиолокатором.
Методы устранения помех используют, так или иначе, эффект Доплера (частота волны, отражённой от приближающегося объекта, увеличивается, от уходящего объекта — уменьшается).
Самый простой радар, который может обнаружить цель в помехах — радар с селекцией движущихся целей (СДЦ) — импульсный радар, который сравнивает отражения более чем от двух или больше интервалов повторения импульса. Любая цель, которая, движется относительно радара, производит изменение в параметре сигнала (стадия в последовательном СДЦ), тогда как помехи остаются неизменными. Устранение помех происходит путём вычитания отражений из двух последовательных интервалов. На практике устранение помех может быть осуществлено в специальных устройствах — черезпериодных компенсаторах или алгоритмами в программном обеспечении.
СДЦ, работающие с постоянной частотой повторения импульсов, имеют фундаментальную слабость: они являются слепыми к целям со специфическими круговыми скоростями (которые производят изменения фаз точно в 360 градусов), и такие цели не отображаются. Скорость, при которой цель исчезает для радиолокатора, зависит от рабочей частоты станции и от частоты повторения импульсов. Современные СДЦ излучают несколько импульсов с различной частоты повторения — такой, что невидимые скорости в каждой частоте повторения импульсов охвачены другими ЧПИ.
Другой способ избавления от помех реализован в импульсно-доплеровских РЛС, которые используют существенно более сложную обработку чем РЛС с СДЦ.
Важное свойство импульсно-доплеровских РЛС — это когерентность сигнала. Это значит, что посланные сигналы и отражения должны иметь определённую фазовую зависимость.
Импульсно-доплеровские РЛС обычно считаются лучше РЛС с СДЦ при обнаружении низколетящих целей во множественных помехах земли, это — предпочтительная техника, используемая в современном истребителе, для воздушного перехвата/управления огнём, примеры тому AN/APG-63, 65, 66, 67 и 70 радары. В современном доплеровском радаре большинство обработки выполняется отдельным процессором в цифровом виде с помощью цифровых сигнальных процессоров, обычно используя высокопроизводительный алгоритм Быстрое преобразование Фурье для преобразования цифровых данных образцов отражений кое во что более управляемое другими алгоритмами. Цифровые обработчики сигналов очень гибки и используемые алгоритмы могут обычно быстро заменяться другими, заменяя только память (ПЗУ) чипы, таким образом быстро противодействуя техники глушения противника если необходимо.
Устройство и принцип действия Вторичного радиолокатора
Принцип действия вторичного радиолокатора несколько отличается, от принципа Первичной радиолокации. В основе устройства Вторичной радиолокационной станции лежат компоненты: передатчик, антенна, генераторы азимутальных меток, приёмник, сигнальный процессор, индикатор и самолётный ответчик с антенной.
Передатчик. Служит для излучения импульсов запроса в антенну на частоте 1030 МГц
Антенна. Служит для излучения и приёма отражённого сигнала. По стандартам ICAO для вторичной радиолокации, антенна излучает на частоте 1030МГц, и принимает на частоте 1090 МГц.
Генераторы Азимутальных меток. Служат для генерации Азимутальных меток (Azimuth Change Pulse или ACP) и генерации Метки Севера (Azimuth Reference Pulse или ARP). За один оборот антенны РЛС генерируется 4096 малых азимутальных меток(для старых систем), или 16384 Малых азимутальных меток (для новых систем), их ещё называет улучшенные малые азимутальные метки (Improved Azimuth Change pulse или IACP), а также одну метку Севера. Метка севера приходит с генератора азимутальных меток, при таком положении антенны, когда она направлена на Север, а малые азимутальные метки служат для отсчёта угла разворота антенны.
Приёмник. Служит для приёма импульсов на частоте 1090 МГц
Сигнальный процессор. Служит для обработки принятых сигналов
Индикатор Служит для индикации обработанной информации
Самолётный ответчик с антенной Служит для передачи импульсного радиосигнала, содержащего дополнительную информацию, обратно в сторону РЛС при получении радиосигнала запроса.
Принцип Действия Принцип действия вторичного радиолокатора заключается в использовании энергии самолётного ответчика, для определения положения Воздушного судна. РЛС облучает окружающее пространства запросными импульсами на частоте P1 и P3, а также импульсом подавления P2 на частоте 1030 МГц. Воздушные суда оборудованные ответчиками находящиеся в зоне действия луча запроса при получении запросных импульсов, если действует условие P1,P3>P2 отвечают запросившей РЛС, Серией кодированных импульсов на частоте 1090 МГц, в которых содержится дополнительная информация типа Номер борта, Высота и так далее. Ответ самолётного ответчика зависит от режима запроса РЛС, а режим запроса определяется растоянием между запросными импульсами P1 и P3 например в режиме запроса А (mode A), расстояние между запросными импульсами станции P1 и P3 равно 8 микросекунд, и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свой номер борта. В режиме запроса C (mode C) расстояние между запросными импульсами станции равно 21 микросекунде и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свою высоту. Также РЛС может посылать запрос в смешанном режиме, например Режим А, Режим С, Режим А, Режим С. Азимут Воздушного судна определяется, углом поворота антенны, который в свою очередь определяется путём подсчёта Малых Азимутальных меток. Дальность определяется, по задержке пришедшего ответа Если Воздушное судно не лежит в зоне действия основного луча, а лежит в зоне действия боковых лепестков, или находится сзади антенны, то ответчик Воздушного судна при получении запроса от РЛС, получит на своём входе условие, что импульсы P1,P3<P2, то есть импульс подавления больше импульсов запроса. Учитываю этот фактор ответчик запирается и не отвечает на запрос. Принятый от ответчика сигнал принимается и обрабатывается приёмником РЛС, затем поступает на сигнальный процессор, который проводит обработку сигналов, и выдачу информации конечному потребителю, и или на контрольный индикатор.
Плюсы вторичной РЛС, более высокая точность, дополнительная информация о Воздушном Судне (Номер борта, Высота), а также малое по сравнению с Первичными РЛС излучение.
См. также
Другие страницы
Литература и сноски
- ↑ 1 2 Поляков В. Т. «Посвящение в радиоэлектронику», М., РиС, ISBN 5-256-00077-2
- ↑ передатчик был установлен на крыше дома 14 по Красноказарменной улице, Москва, приёмник — в районе посёлка Новогиреево; присутствовали М. Н. Тухачевский, Н.Н.Нагорный, М. В. Шулейкин. Аппаратуру демонстрировал П. К. Ощепков.
- ↑ Испытания в Евпатории, группа Б. К. Шембеля
- ↑ http://www.young-science.ru/index.php?option=com_content&task=view&id=215&Itemid=66
- ↑ Шембель Б. К. У истоков радиолокации в СССР. — Советское радио, 1977, № 5, с. 15-17.
Wikimedia Foundation. 2010.
dic.academic.ru