
Вектор тяги. К вопросу о двигателях для истребителей пятого поколения
Моторы самых первых аэропланов работали на фиксированных оборотах, но как только появилась возможность регулирования их мощности, этот процесс стал неотъемлемой частью управления самолетом в целом.
С достижением сверхзвуковых скоростей и высот значение управления тягой для выдерживания заданной траектории резко возросло, поскольку на многих режимах полета управляющие моменты, создаваемые одними только рулевыми поверхностями, а иногда даже и подъемная сила крыла для этого стали уже недостаточны. Это особенно сильно чувствовалось в таких «пилотируемых ракетах», как советский перехватчик Су-9 Сухого, или американский Локхид F-104 «Старфайтер», не только высотно-скоростные качества которых, но их устойчивость и управляемость определялись в значительной мере именно тягой двигателя.
Весь облик таких самолетов был нацелен на достижение максимальных высот и скоростей, они должны были выполнить перехват сверхзвукового противника в стратосфере, двигаясь почти как баллистическая ракета – «на двигателе». Но практика показала ошибочность такого упрощённого подхода к ведению войны в воздухе. В 1970-е годы началась переоценка ценностей во взглядах на приоритеты в летно-тактических данных самолетов-истребителей. Их скорость и высотность больше не росли, а на первый план вновь вышли показатели маневренности и дальности полёта. Некоторые эксперты считали, что теперь не важно, какой будет двигатель, а главное – аэродинамика и весовое совершенство. Однако попытка установки на истребитель IV поколения F-16 одноконтурного двигателя III поколения J79-GE вместо ТРДДФ IV поколения F100-PW-200 привела к такому падению боевых свойств, что от него отказались даже страны «третьего мира». И никто больше не сомневается, что для самолета V поколения и двигатель нужен этого же поколения. Но каким он должен быть?
Истребители IV поколения от предыдущих (на фото F-15А и YF-17 слева от самолета F-104) отличали не только аэродинамика, конструкция, оборудование и вооружение, но и двигатели – экономичные двухконтурные
Новое поколение – новые задачи
В начале 1970-х гг. американская авиапромышленность создала тактические истребители F-15A и F-16A с очень высокими летными данными. Однако появившиеся в ответ советские МиГ-29 и Су-27 сохранили традиционное превосходство в ближнем бою и существенно сократили, а то и свели на нет отставание по дальности полета, возможностям управляемого вооружения и прицельного оборудования. Модернизация F-15 и F-16 ВВС США, как и палубных F-18, шла в направлении наращивания их ударного потенциала и их шансы в воздушном бою против обновленных МиГов и Су, особенно на малых дистанциях, сократились ещё более. Потому приступая к разработке следующего поколения истребителей, командование ВВС США во главу угла поставило именно летные данные.
Двухконтурные турбореактивные двигатели с форсажной камерой АЛ-31Ф наряду с передовой аэродинамикой определили высокие летные данные истребителя IV поколения Су-27 – скорость, маневренность, дальность
Оно хотело получить устойчивое, сохраняемое длительное время преимущество над советскими самолетами в маневренности, что лишило бы ВВС СССР традиционного превосходства в ближнем бою над линией фронта и гарантировало бы решение задачи захвата господства в воздухе для обеспечения действий ударной авиации. Для этого и был нужен двигатель с управлением вектором тяги, объединенным с системой основного (аэродинамического) управления самолетом.
Вторым аспектом было одновременное сокращение времени реакции и повышения радиуса действия, что давало возможность быстро концентрировать авиацию на решающем направлении. Первое традиционно достигалось уменьшением времени подготовки к боевому вылету, но уже к середине 70-х гг. здесь резервы были исчерпаны. Трудозатраты по обслуживанию на один час полета самолета-истребителя достигли низшего возможного предела: для F-15A они сократились до 11,3 часа, что было вдвое ниже, чем на самолете F-4E, и в 2,8 раза ниже, чем на F-4C. Даже на 1 час полета поршневого истребителя Р-51 «Мустанг» времен II мировой войны надо было тратить 15 часов труда техсостава! Оставалось увеличивать крейсерскую скорость до сверхзвуковой – у F-15A, например, она была лишь 930 км/ч. Это попутно дало бы и тактические преимущества при вступлении в воздушный бой.
Чтобы увеличить радиус действия обычно старались снизить километровый расход топлива и увеличить объем баков. Дозаправка в полете не касается нашей темы, а эти пути непосредственно связаны с совершенствованием двигателей. Чтобы они тратили как можно меньше керосина на километр, повышали степень сжатия входящего воздуха в компрессоре, температуру в камере сгорания (перед турбиной), разделяли роторы на два (высокого и низкого давления), наконец, перешли на двухконтурные двигатели с форсажной камерой – ТРДДФ.
Но за выгоды ТРДДФ на дозвуковых крейсерских режимах приходилось платить ухудшением характеристик на режимах боевых, а проценты дальнейшего снижения расхода топлива давались все труднее. Оставалось убирать непроизводительные его потери, повышая точность регулирования режима работы, но это какие-то проценты, или же переходить на сверхзвуковой крейсерский режим.
Советский истребитель-бомбардировщик Су-7Б с одноконтурным турбореактивным двигателем АЛ-7Ф со сравнительно низкими температурами газов за турбиной достигал сверхзвуковой скорости и без включения форсажа, но дальность у него при этом все равно была маленькая
Фото: defence.ru
Еще с начала 50-х гг. советские самолеты Су-7 и Су-9, или английские «Лайтнинг» могли ходить на сверхзвуке без включения форсажа, но и при этом их дальность все равно получалась очень маленькой. Форсажный крейсерский сверхзвуковой режим более был получен на МиГ-25 с низконапорными одноконтурными ТРДФ, а затем на МиГ-31 с ТРДДФ. Но радиус действия этих крупных и тяжелых машин был таким в основном не благодаря высокой экономичности двигателей, а за счет объема баков. Для маневренных истребителей этот путь не годился – нужны были принципиально новые конструкции авиационных двигателей.
Самолет МиГ-25 с низконапорными одноконтурными ТРДФ Р-15-300, выпускавшийся в модификациях перехватчика, разведчика-бомбардировщика и самолета для борьбы с ПВО, имел форсажный сверхзвуковой крейсерский режим полета
Фото: avia-simply.ru
Истребитель-перехватчик МиГ-31 дальнего действия сопровождает сверхзвуковой дальний ракетоносец Ту-22М3. На МиГ-31 установлены двухконтурные двигатели Д30Ф-6 и для выхода на сверхзвуковой крейсерский режим он включает форсаж
Фото: russianarms.ru
И последним средством достижения превосходства в воздушном бою должна была стать концепция «первым увидел – первым выстрелил». Если ранее она реализовалась за счет большей дальности действия радиолокационной станции и ракет, то на поколении IV эти параметры у советских и американских истребителей сравнялись, и американцами ставка была сделана на ограничение демаскирующих признаков путем внедрения технологий «стелс» в конструкции и самолетов, и их силовых установок. В таком ключе в США были задуманы программы создания истребителей ATF и двигателей AFE поколения V.
По итогам конкурса для серийного выпуска были отобраны истребитель F-22A «Раптор» концерна «Локхид – Мартин», о котором мы писали в № 4 и 5 нашего журнала за 2008 г., и двигатель Пратт-Уитни F119-PW-100. Он был рассчитан на крейсерский полет с числами М=0,8…1,5 на высотах 60…16000 м и на ведение маневренного воздушного боя при М=0,5…1,8 на тех же высотах. При выполнении перехвата число М могло расти до 2,0…2,2, а высота полета – до 18000 м.
Пратт-Уитни F119-PW (AFE) на стенде – это первый в мире серийный двигатель для истребителей V поколения
Фото: s2.smu.edu
Первый в мире серийный истребитель V поколения – американский Локхид-Мартин F-22A «Раптор», созданный по программе ATF, с ТРДДФ F119-PW (AFE)
Для советских истребителей V поколения Сухой С-22/С-32/С-37 и Микоян 1.44/1.42 были созданы двигатели Д30Ф9 и АЛ-41Ф, которые представляли собой глубокие модификации серийных ТРДДФ IV поколения Д30Ф6 и АЛ-31ФП. Зоны их крейсерских режимов должны были быть такими же, как и у «американца», но боевые были расширены вправо и вверх – до М=2,3…2,5 и Н=18000…22000 м с возможностью маневрирования там со значительными углами атаки и перегрузками.
Спроектированный еще во времена СССР истребитель V поколения Микоян 1.44/1.42 был оснащен двигателем АЛ-41Ф – это была глубокая модификация серийного ТРДДФ IV поколения АЛ-31ФП
Фото: архив автора
Так получалось, что первый ход в создании IV и V поколений самолетов истребительной авиации делала Америка. Хорошо это или плохо для её вероятного противника – для СССР, а теперь для России? Конечно, что хорошего в постоянном отставании? Но с другой стороны такая ситуация позволяла перенимать готовые удачные решения и учитывать чужие ошибки, строя свой ответ с учетом их. Действительно, ни в одном из этих случаев Америке не удалось сделать так, чтобы её противник был вынужден пассивно следовать предложенным правилам игры и пытаться просто повторить то, что она делала, чтобы выдержать лишь симметричный паритет. Это касается и создания двигателей для самолетов истребительной авиации.
И первые советские истребители V поколения 1.44, разработанный ОКБ им. Микояна, и Сухой С-37, и сегодняшний Т-50, при всем сходстве поставленных задач и отдельных инженерных решений не являются попыткой повторить американский F-22 – об этом мы недавно подробно говорили. То же самое можно сказать и об их силовых установках.
Новые задачи – новые решения
Как только на самолетах III поколения, например, на F-111, стали видны недостатки ТРДДФ, начался поиск путей их устранения либо создания двигателей другой схемы. Конструкторы рассматривали силовые установки комбинированные и изменяемого цикла, одноконтурные многовальные ТРДФ, двигатели с выносными компрессорами («двухтрубные») и вовсе без форсажных камер и т.д., однако и сегодня большинство истребителей (за исключением F-35B с вертикальной посадкой – его ТРДДФ F135-PW-600 имеет выносное устройство вертикальной тяги и отклоняемое сопло – не путать с изменением вектора тяги для улучшения маневренности) всё ещё оснащены «обычными» ТРДДФ. Но их компоненты эволюционируют очень заметно, и именно это обеспечивает этому классу двигателей такое долголетие.
Естественно, пути этой эволюции в России и в США отличаются, что определяется различиями в поставленных задачах. Но вместе с тем в них есть и много общего. И в Америке, и в России при создании двигателей V поколения сохранились тенденции уменьшения двухконтурности при повышении степени сжатия в компрессоре, увеличения оборотов и температуры газов на выходе из основной камеры сгорания, а также роста удельных характеристик за счет и тяги без ограничения, а то и с наращиванием ресурса двигателя. Это достигается как обычно – путем улучшения способов смазки и охлаждения деталей, а также использованием новых материалов и технологий их обработки.
Рассматривались различные способы снижения массы и размеров двигателя как за счет более рациональной конструкции каждой детали, так и путем уменьшения числа ступеней компрессора и турбины. Если ротор ТРДДФ IV поколения в сумме имел 17…14 ступеней, то на V поколении их только 11…12, но при этом не удалось сократить ни длину, ни массу двигателя, потому что «работали против этого» другие факторы, определившие их рост.
Например, значительное расширение области возможных режимов работы (как крейсерских, так и боевых) потребовало полной переделки компрессора, как элемента наиболее чувствительного к свойствам входящего потока.
Когда разработка двигателей V поколения только начиналась, большое внимание уделялось снижению эффективной площади рассеивания (ЭПР), демаскирующего признака при облучении радиолокатором. Намеревались делать лопатки из композитов со сложной внутренней макроструктурой, наносить на них радиопоглощающее покрытие или профилировать их так, чтобы отраженные сигналы взаимоподавлялись. Но все это оказалось слишком сложно, и обошлись «радар-блокером» – сравнительно простым подавляющим сигнал РЛС устройством, которое стоит перед входным направляющим аппаратом компрессора (ВНА) и за стабилизаторами пламени форсажных камер. Естественно, за малозаментость пришлось заплатить ухудшением газодинамики и увеличением веса, пусть и небольшим.
Истребитель Локхид-Мартин F 22A «Раптор» – видны радар-блокеры за стабилизаторами пламени форсажных камер двигателей
Фото: paralay.com
Можно ли обойтись без радар-блокеров как отдельных агрегатов и снизить ЭПР двигателя? Теоретически да – если найти такую форму устройств защиты воздухозаборников от попадания посторонних предметов и стабилизаторов пламени в форсажной камере, которая бы обеспечила совмещение разных функций в одном агрегате без существенной потери качества их исполнения и роста массы. Фактор материала здесь, по-видимому, мешать не будет – он один и тот же. Делается ли это? Не берусь утверждать, но на двигателе АЛ-41Ф1С отдельных радар-блокеров в форсажной камере нет.
Для двигателей V поколения в СССР и в США были созданы трехступенчатые компрессоры низкого давления (КНД) с регулируемым и входным направляющим аппаратом (ВНА) и широкоходными лопатками, спрофилированными так, чтобы исключить помпаж и зуд без перепуска воздуха, вызывающего потери давления, увеличивающего ЭПР и усложняющего конструкцию. Чтобы удовлетворить этим требованиям и достичь заданных выходных характеристик пришлось пойти на рискованные решения. Отказ от антивибрационных полок улучшил газодинамическое качество лопаток КНД, снизил и ЭПР и массу, но чтобы обеспечить их жесткость пришлось предпринимать другие меры, пойдя на усложнение и удорожание технологии.
Особенностью американского двигателя F119-PW-100 является то, что часть потока сравнительно холодного воздуха от КНД идет мимо камеры сгорания, как это сделано в турбовентиляторных двигателях без смешения потока транспортных самолетов. Этот воздух охлаждает створки агрегата УВТ и «окутывает» горячую часть реактивной струи, но остальное направляется в основную камеру сгорания (ОКС) и далее уже в виде горячего газа после сгорания топлива в ней топлива – в форсажную камеру сгорания (ФКС).
Такой отбор воздуха, естественно, ведет к ухудшению тяговых и расходных показателей двигателя. В СССР, а затем в России технологиям «стелс» не придавалось такого значения, но и там пришлось отбирать часть воздуха на охлаждение сопла. Правда, по другой причине – для обеспечения его работы при отклонении вектора тяги на большой угол.
Компрессор низкого давления IV поколения имел 9-10 ступеней, а V поколения – только 6. Относительное удлинение его лопаток уменьшилось, что позволило повысить их газодинамическую эффективность и прочность.
Конструкция Пратт-Уитни F119-PW (AFE) и его системы управления вектором тяги
Фото: smu.edu
Конструкторы американской фирмы «Дженерал Электрик» в своем варианте двигателя AFE (YF120-GE) пытались регулировать пропорцию расходов воздуха через контуры низкого и высокого давления путем изменения газодинамических свойств трактов в целом. Их двигатель на режиме максимальной тяги, при разгоне с числом M>1 и в сверхзвуковом крейсерском полете должен был работать как «чистый» одноконтурный ТРД, а при крейсерском полете на дозвуке и на снижении и т.д. – как ТРДД. Но это оказалось слишком сложно и дорого, что и стало одной из главных причин проигрыша в конкурсе.
Московское НПО «Сатурн» тоже делало свой ТРДДФ V поколения как двигатель изменяемого цикла, но пошло по другому пути. Регуляция потоков происходит в камере, где они смешиваются, что и позволило, хотя и не сразу, успешно решить эту очень сложную задачу.
Новинкой российского двигателя является плазменная система зажигания ОКС. Она более надежна как для обеспечения работы двигателя в момент пуска ракет, так и при его запуске в полете после аварийной остановки, что является «больным» вопросом на двигателях с широкоходным КНД.
Американским ноу-хау в области обеспечения ресурса основных камер сгорания являются «плавающие теплозащитные стенки», а также в ее конструкции применен новый сплав с увеличенным содержанием кобальта, который имеет повышенную сопротивляемость термической коррозии. В то же время опыт показывает, что ОКС не является тем элементом, который в первую очередь определяет ресурс двигателя. Другими словами, камера сгорания после наработки положенных тысяч часов будет в хорошем состоянии, но его все равно надо будет отправлять на капремонт, т.к. этого будут требовать другие узлы. Но о ремонте – чуть ниже, а пока идем дальше по двигателю и попадаем в турбину.
Число ступеней турбин высокого и низкого давления на ТРДДФ V поколения уменьшено до минимума – до одной в каждом каскаде (раньше их обычно было по две). Это самая нагруженная и теплонапряженная часть ТРДДФ, потому лопатки ТВД на двигателях IV поколения сделаны охлаждаемыми. Теперь нагрузка на каждую лопатку выросла, тем не менее, они стали неохлаждаемыми, что исключило необходимость отбора воздуха от компрессора, упростив конструкцию двигателя.
Но стоимость от этого не уменьшилась, а наоборот – резко выросла. В 70-е гг. изготовление неохлаждаемых лопаток турбин шло по пути внедрения технологий их «выращивания» как монокристаллов, но это оказалось дорого даже для одной лопатки – детали сравнительно небольшой. А теперь для снижения массы и исключения потерь давления за счет перетекания потока по стыкам лопаток и дисков рабочих колес компрессоров и турбин они делаются цельными. В США это называется Integrally Bladed Rotor – IBR. Попробуем представить, как вырастить монокристалл размером около метра! И сколько это будет стоить…
Потому пришлось вернуться к тому, от чего пытались уйти – к литью или к порошковой металлургии, поскольку штамповку, техпроцесс, оптимальный с точки зрения ресурса, нельзя применить из-за перекрытия лопаток, установленных плотно, с малым угловым шагом. Так можно сделать только заготовку для интегрального рабочего колеса. Да и допуски на размеры здесь таковы, что обойтись без последующей мехобработки отливки или порошковой детали не получается. И теперь представим: фрезерный станок с ЧПУ на минимальной подаче обрабатывает одну за другой десятки поверхностей двойной знакопеременной кривизны и каждая – под своим исходным углом, да еще перекрывающие друг друга! Может быть решение этой технологической проблемы будет найдено с развитием 3D-принтеров? Но обеспечат ли они длительное сопротивление такого рабочего колеса температурным и силовым нагрузкам, износу от механического трения и сверхбыстрого потока очень горячих газов с частичками сажи?
Валы роторов низкого и высокого давления ТРДДФ V поколения установлены на несмазываемых подшипниках и имеют противоположное направление вращения. Зазоры между нагруженными потоком и центробежной силой, нагретыми до температуры более 1500°С лопатками турбины и стенками проточной части должны быть минимальны. Так пытались сделать еще на ТРДФ III поколения J79-GE и АЛ-21Ф, но тогда столкнулись с явлением «титанового пожара». Изготовленные из этого материала лопатки под действием центробежных сил и высоких температур вытягивались, чиркали на своей огромной скорости о стенки канала и температура там подскакивала настолько, что он мгновенно возгорался. Пришлось материал лопаток и стенок каналов заменить на более тяжелую сталь, а вдоль их «дорожек» на внутренней стороне каналов проложить термостойкое спецпокрытие.
Одноконтурные двухвальные высокотемпературные ТРДФ АЛ-21Ф советского фронтового бомбардировщика III поколения Су-24, как и американские J79-GE самолета F-4 «Фантом» отличались выполнением многих нагруженных деталей из титановых сплавов и уменьшенными до предела зазорами между лопатками и корпусом
Фото: архив автора
Сама форсажная камера сгорания при создании двигателей V поколения не претерпела значительных изменений, однако надо помнить, что их тяга существенно выросла, соответственно увеличились силы и температуры, действующие в ней. Единственным конструктивным новшеством стали радар-блокеры, аналогичные установленным перед ВНА. Но в ФКС они включены в конструкцию, работают в горячем потоке и должны не только не ухудшать, но и стабилизировать процесс горения истекающей с огромной скоростью топливовоздушной смеси.
Самым заметным внешним отличием российского двигателя V поколения АЛ-41Ф1 и американского F119-PW-100 является сопло со всеракурсно изменяемым вектором тяги. Конструкторы и в России, и в США вот уже много лет работают в этом направлении. Еще в СССР были проведены сравнительные испытания управляемого двумерного (плоского) и осесимметричного сопла со сферическим шарниром на летающих лабораториях на базе самолета Су-27. Они показали, что «круглый» вариант не только дает меньшие потери давления на прямом сопле и при перекладке, но при этом позволяет всеракурсное управление, тогда как плоское сопло дает возможность отклонять вектор тяги только в одной плоскости. И при этом было найдено такое решение поворотного узла, которое обеспечило существенный выигрыш в стоимости, массе, размерах и внешней аэродинамике этого агрегата по сравнению с «плоским» вариантом.
Российский истребитель Су‑35С имеет двигатели АЛ-41Ф1С с легкими и обтекаемыми осесимметричными соплами со всеракурсным управлением вектором тяги
Фото: yaplakal.com
Американцы до такого при проектировании двигателей V поколения додуматься не смогли. Аналитики, рассматривающие достоинства двигателя F119-PW-100 самолета F-22A, объясняют выбор «плоского» сопла тем, что оно имеет пилообразные кромки, снижающие ЭПР. Однако уже давно очевидно, что значение этого аспекта в свое время было непомерно раздуто. Следующий истребитель V поколения F-35/JSF имеет двигатель с осесимметричным соплом – типа F135-PW. От российского АЛ-41Ф1 оно отличается «зубчатой» кромкой для снижения заметности и отсутствием управления вектором тяги.
Отклонение тяги вниз на режиме посадки есть у двигателя F135-PW-600 – оно чем-то напоминает советский ТРДДФ Р-79 разработки 1980-х гг., но потери давления в нем вероятно выше, судя по «угловатому» характеру изгиба канала из-за примитивной его конструкции. Опять же, такое управление не годится для улучшения маневренности в бою.
Преимуществом сопел двигателей F119-PW-100 истребителя F-22A считаются пилообразные створки, которые должны служить одновременно для управления вектором тяги и для снижения радиолокационной и визуальной (в том числе в ИК и УФ спектре) заметности самолета
Фото: airportjournals.com
Истребитель V поколения Локхид-Мартин F-35B «Лайтнинг» II выполняет пуск ракеты ASRAAM. Его двигатель F135-PW имеет осесимметричное сопло, способное отклоняться вниз на угол порядка 90 градусов – как и у советского ТРДДФ Р-79 разработки 1980-х гг.
Фото: lockheedmartin.com
Усложнение управления двигателем с изменяемым вектором тяги, необходимость его объединения с процессом управления полетом в целом потребовала сделать следующий шаг в развитии соответствующих систем силовой установки. Двигатели IV поколения имели электронно-гидромеханическую систему регулирования, которая могла строится как на базе полноценного цифрового компьютера, так и достаточно простого аналогового вычислителя. Такая электроника лишь корректировала режимы, задаваемые полностью пилотом, перемещавшим рычаг управления двигателем (РУД), то теперь за ЭВМ закреплена основная роль. Особенностью V поколения ТРДДФ является электронная (цифровая) система управления с полной ответственностью. На Западе её называют FADEC – Full-Authority Digital Electronic (engine) Control.
На двигателе F119-PW-100 самолета F-22A она состоит из двух блоков управления на каждом двигателе – один рабочий и один резервный. В каждом блоке есть два канала, каждый – со своим компьютером, и таким образом каждый из двух двигателей американского истребителя теоретически имеет один работающий и три резервных канала управления. Российский АЛ-41Ф1 оснащен таким же цифровым управлением с полной ответственностью с элементами распределенных параметров.
И последнее. Все описанные компоненты выше объединяет корпус. Особенность любого реактивного двигателя заключается в том, что весь он в большей или меньшей степени нагружен силами, вызванными его тягой, и к тому же местами нагрет до очень немаленьких температур. Но грамотная конструкция, учитывающая реально действующие напряжения в его материале в каждом месте, может быть достаточно легкой. Но не дешевой.
При создании корпусов ТРДДФ давно используются методы компьютерного проектирования. Они делают прочностные и тепловые расчеты по методам конечных элементов, позволяющим оптимизировать выбор сечений и материалов деталей. Переход на крупногабаритные панели одновременно усложняет и упрощает это: увеличивается количество обсчитываемых элементов, но уменьшается число связей между деталями и реакций в них.
В результате формы частей корпуса становятся все сложнее, а требования к точности – все выше. Их уже не может обеспечить ни литье, ни штамповка, ни порошковая металлургия и приходится применять механическую обработку там, где раньше обходились «без стружки».
Ну и последнее – материалы. Например, корпусные детали F119-PW-100 вновь делают из титанового сплава, причем из специального – в США он именуется Titanium C-Alloy. Да, титан легче стали примерно вдвое при той же прочности, но он в разы дороже, труднее обрабатывается, имеет проблемы со сваркой и температурными деформациями.
Как видим, трудностей на пути создателей двигателей для истребителей V поколения было множество, и причем мы перечислили их не все. И тем не менее, они их преодолели. Как – мы узнаем во второй части статьи.
Продолжение
Часть 2. Двигатель V поколения как объективная реальность
Статьи по теме:
Страсти вокруг Су-57
Рекордная скороподъемность истребителя Т-50
Напоминаем Вам, что в нашем журнале «Наука и техника» Вы найдете много интересных оригинальных статей о развитии авиации, кораблестроения, бронетехники, средств связи, космонавтики, точных, естественных и социальных наук. На сайте Вы можете приобрести электронную версию журнала за символические 60 р/15 грн.
В нашем интернет-магазине Вы найдете также книги, постеры, магниты, календари с авиацией, кораблями, танками.
Нашли опечатку? Выделите фрагмент и нажмите Ctrl+Enter.
Новости о науке, технике, вооружении и технологиях.
Подпишитесь и будете получать свежий дайджест лучших статей за неделю!
Email*
Подписаться
naukatehnika.com
Отклоняемый вектор тяги — это… Что такое Отклоняемый вектор тяги?
Отклоняемый вектор тяги — функция сопла, изменяющая направление истечения реактивной струи. Предназначена для улучшения тактико-технических характеристик самолёта. Регулируемое реактивное сопло с отклоняемым вектором тяги — устройство с изменяемыми, в зависимости от режимов работы двигателя, размерами критического и выходного сечений, в канале которого происходит ускорение потока газа с целью создания реактивной тяги и возможностью отклонения вектора тяги во всех направлениях.
История разработки
Вертикальный взлет и посадка
Первые опыты, связанные с практической реализацией отклоняемого вектора тяги на самолетах, относятся к 1957 году и проводились в Великобритании в рамках программы по созданию истребителя с вертикальным взлетом и посадкой. Прототип под обозначением Р.1127 был оснащен двумя поворачивающимися на 90° соплами, расположенными по бокам самолета на линии центра тяжести, которые обеспечивали движение в вертикальном, переходном и горизонтальном режимах полета. Первый полет Р.1127 состоялся в 1960 году, а в 1967 году на его базе был создан первый серийный СВВП «Харриер».
Существенным шагом вперед в разработке двигателей с отклоняемым вектором тяги в рамках программ СВВП стало создание в 1987 советского сверхзвукового СВВП ЯК-41. Принципиальной отличительной чертой данного самолета стало наличие двух двигателей: одного подъемного и одного подъемно-маршевого с поворотным соплом, расположенным между хвостовыми балками. Трехсекционная конструкция сопла подъемно-маршевого двигателя делала возможным поворот вниз от горизонтального положения на 95°. В силу ряда причин ЯК-41М не производился серийно, однако реализованная на нем конструкция двигателя сыграла основополагающую роль в конце 1990-х годов в США в ходе работ по созданию будущего истребителя F-35.
Расширение маневренных характеристик
Ещё в ходе работ над Р.1127 испытателями было замечено, что использование отклоняемого вектора тяги в полете несколько облегчает маневрирование самолета. Однако из-за недостаточного технического уровня и приоритетности программ СВВП серьёзные работы в области повышения маневренности за счет ОВТ не велись до конца 1980-х годов.
В 1988 году на базе истребителя F-15B был создан экспериментальный самолет с двигателями с плоскими соплами и отклонением вектора тяги в вертикальной плоскости. Результаты испытательных полетов показали высокую эффективность ОВТ для повышения управляемости самолета на средних и больших углах атаки.
Приблизительно в то же время в Советском Союзе был разработан двигатель с осесимметрическим отклонением сопла кругового сечения, работы над которым велись параллельно с работами над плоским соплом с отклонением в вертикальной плоскости. Поскольку установка плоского сопла на реактивный двигатель сопровождается потерями 10-15 % тяги, предпочтение было отдано соплу с осесимметрическим отклонением и в 1989 году состоялся первый полет истребителя Су-27 с экспериментальным двигателем.
ОВТ на современных самолетах
В настоящее время система отклонения вектора тяги рассматривается как один из обязательных элементов современного боевого самолета в связи со значительным улучшением летных и боевых качеств, обусловленным ее применением. Также активно изучаются вопросы модернизации имеющегося парка боевых самолетов, не имеющих ОВТ, путем замены двигателей или установки блоков ОВТ на штатные двигатели. Второй вариант был разработан одним из ведущих российских производителей ТРД — компанией «Климов», которая также выпускает единственное в мире серийное сопло с всеракурсным отклонением вектора тяги для установки на двигатели РД-33 (семейство истребителей МИГ-29) и АЛ-31Ф (истребители марки СУ).
Боевые самолеты с управляемым вектором тяги:
- C осесимметрическим отклонением вектора тяги
- С отклонением вектора тяги в плоском сопле
См. также
dic.academic.ru
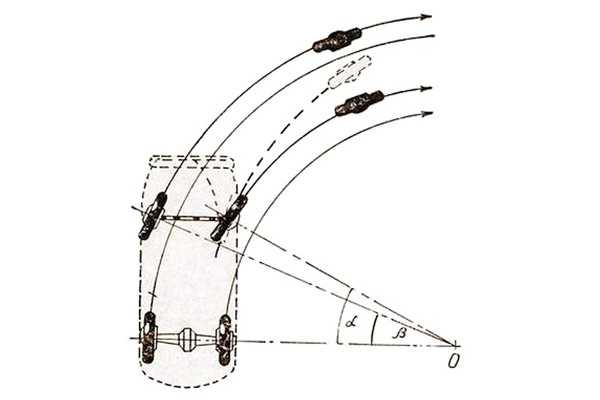
 Как работает система управления вектором тягиКак работает система управления вектором тягиПавел Михайлов, опубликовано 02 мая 2017 Фото: Фирмы-производители Дифференциал есть в любом автомобиле, но зачем он нужен? А что такое «активный дифференциал» с функцией torque vectoring — и почему он помогает поворачивать? Давайте выясним! В движении все колеса автомобиля вращаются с разной скоростью. Хотя бы потому, что дорога неровная, и если одно из колес наезжает на кочку, то оно проходит большее расстояние, чем все остальные, которые едут по ровной дороге. А в повороте все совсем плохо: каждое из четырех колес едет по собственному радиусу (обратите внимание на следы, оставляемые автомобилями на снегу). И если для неведущих колес это не проблема, то с приводными все не так просто. Когда два ведущих колеса соединены жестким валом, то шины будут постоянно пробуксовывать или проскальзывать, а значит, быстро изнашиваться. При этом возрастет расход топлива, да и управляться автомобиль будет хуже. Чтобы избежать этих проблем, автомобили оснащают дифференциалами.
Изобретателем дифференциала считается французский математик Онесифор Пеккёр, а само событие датируется 1825 годом. Хотя, по некоторым данным, подобное устройство существовало еще в Древнем Риме, но вопрос истории давайте оставим специалистам. В этой статье мы уделим больше внимания относительно молодой системе, известной как torque vectoring, что в переводе с английского значит «управление вектором тяги». Для начала стоит разобраться, как вообще работает дифференциал. Он состоит из четырех основных элементов: корпуса, сателлитов, оси сателлитов и шестерен полуосей. Принцип его работы несложен: корпус дифференциала жестко соединен с ведомой шестерней главной передачи, ось сателитов жестко соединена с корпусом. Крутящий момент передается на корпус, от него на ось сателлитов и, соответственно, на сами сателлиты — а те, в свою очередь, передают усилие на шестерни полуосей.
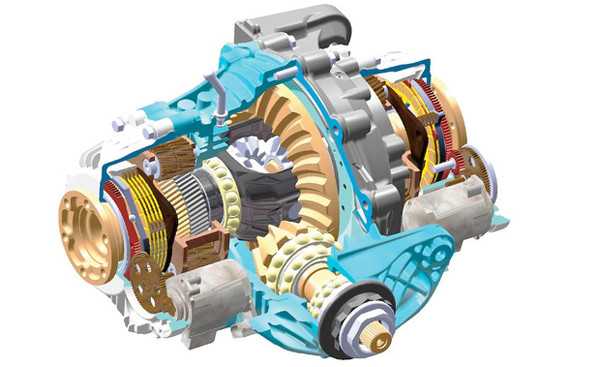
Вспомните, как в детстве на качелях уравновешивали друга такой же комплекции — можно было зависнуть в воздухе, не касаясь земли. В дифференциале шестерни полуосей одинаковые, поэтому плечо силы для левой и правой полуоси тоже одинаковое, а значит, и крутящий момент на левом и правом колесе один и тот же. Дифференциал позволяет колесам крутиться в разные стороны друг относительно друга. Попробуйте на подъемнике покрутить одно приводное колесо — второе будет вращаться в обратную сторону. Однако относительно автомобиля эти колеса крутятся в одну сторону — ведь корпус дифференциала тоже вращается! Это как если бы вы шли в автобусе против хода и при этом все равно удалялись от оставшегося на остановке человека. Итак, получается, что два колеса вращаются с одинаковым усилием и имеют возможность делать это с разными скоростями. Максимально наглядно это показано в видеоролике: У такой конструкции есть недостаток: на оба колеса приходится одинаковый крутящий момент, а чтобы автомобиль лучше поворачивал, было бы неплохо подать больше крутящего момента на внешнее колесо. Тогда машина при нажатии на газ будет буквально ввинчиваться в поворот — и эффект будет выражен гораздо более ярко, чем на автомобиле с приводом на одну ось и свободным дифференциалом. Но как воплотить такую систему в реальной конструкции? Сегодня подобные системы становятся все более популярными. Само словосочетание «torque vectoring» впервые прозвучало в 2006 году, однако подобная система, именуемая Active yaw control, появилась еще на раллийных трассах девяностых: ей был оборудован Mitsubishi Lancer Evolution IV, дебютировавший в 1996 году. Но прежде чем подробно разобраться в устройстве полноценного дифференциала с системой torque vectoring, давайте сначала взглянем на ее упрощенный аналог, используемый в автомобиле Ford Focus RS. Аналогичная система использована в трансмиссии Land Rover Discovery Sport и Cadillac XT5.
Система довольно проста — она даже несколько проще, чем традиционный подключаемый полный привод, ведь в ней нет заднего дифференциала. Есть только две муфты, каждая из которых подключает свою полуось. При движении по прямой без скольжений автомобиль остается переднеприводным, задние колеса подключаются только при пробуксовках и в поворотах (в левом вираже — правое заднее колесо, и наоборот). На колесо может приходиться до 100% крутящего момента, идущего на заднюю ось, тем самым система компенсирует возникающую недостаточную поворачиваемось, как бы докручивая автомобиль. А как быть, если ведущая ось только одна, и в спокойных режимах обязательно необходим дифференциал, притом открытый, а в повороте хочется подать больше крутящего момента на внешнее колесо, чтобы эффективнее контролировать машину газом, а также уменьшить недостаточную поворачиваемость?
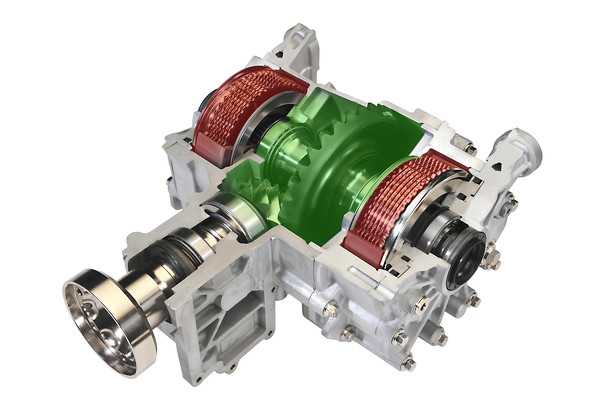
Такие решения также существуют в современном автопроме. Например, автомобили Lexus RC F и GS F последнего поколения оснащены задним дифференциалом, умеющим распределять момент между левым и правым колесом. У такого узла в заднем редукторе главная передача вращает корпус самого обыкновенного дифференциала, там же стоят две повышающие планетарные передачи, которые с помощью пакета фрикционов могут соединить корпус дифференциала с полуосью. Таким образом, к наружному колесу подводится дополнительный крутящий момент через планетарную передачу, за счет чего и возникает эффект ввинчивания в поворот.
Аналогичное решение применено и на задней оси полноприводных BMW X6 M и X5 M — как для BMW, так и для Lexus, и для Cadillac с Land Rover систему разработала и производит фирма GKN. Различие по большому счету только в корпусе главной передачи: например, у BMW он алюминиевый, а у Lexus — чугунный. Привод фрикционных муфт обоих производителей механический, осуществляется он одинаковыми муфтами GKN.
В автомобилях Audi с опциональным спортивным дифференциалом тоже есть подобная система, но здесь не планетарные, а простые зубчатые передачи с внутренним зацеплением. Но принцип работы абсолютно такой же: с помощью пакета фрикционов соединяются две шестерни, и полуось подключается к корпусу дифференциала через повышающую передачу. Для более полного понимания можно посмотреть этот ролик: Насколько же велик эффект от использования продвинутых дифференциалов? Американский журнал Car and Driver провел сравнительный тест двух Lexus RC F, один из которых был оснащен системой torque vectoring differential, а второй — обычным «самоблоком». Как результат, более значительные максимальные ускорения, меньший угол поворота руля и лучшее время на круге у автомобиля с активным дифференциалом, характер автомобиля изменился в сторону избыточной поворачиваемости. И радует, что доступна она не только для спортивных автомобилей, но и для для компактного кроссевера Nissan Juke — пусть и в несколько упрощенном варианте.
Пока не стоит ожидать, что такие системы вытеснят традиционные дифференциалы — ведь они сложнее, дороже и больше нужны активным водителям. Однако с наступлением эры электромобилей появятся широчайшие возможности для управления вектором тяги: ведь если на каждое ведущее колесо приходится свой электромотор, то реализация эффекта torque vectoring станет лишь вопросом программного обеспечения.
|





www.carscope.ru
Управление вектором тяги – что это?
Про “отклоняемое сопло” и управление вектором тяги, применительно к авиационным двигателям, то и дело рассказывают в СМИ и на популярных сайтах. Особенно если речь идёт о пятом поколении истребителей (которое нужно пропустить). Правда, с терминологией иногда случается путаница.
Вообще, под понятие “управление вектором тяги” реактивного двигателя попадает всякое техническое решение, позволяющее отклонять реактивную струю от некоторого, условно говоря, “основного” положения. При этом “отклоняемое сопло” – это только один из методов управления вектором тяги.
“Манипуляции” с вектором тяги служат для создания дополнительных управляющих сил. Например, на многих гражданских авиалайнерах двигатели оборудованы реверсивным устройством, которое используют обычно для торможения самолёта во время посадки. Реверсивное устройство управляет вектором тяги двигателя, “обращая” этот вектор относительно его направления в крейсерском режиме работы двигателя. Есть разные технические решения, включающие в себя отклоняемые элементы. Пример – на фото:

Так что само по себе управление вектором тяги – вещь давно известная и многократно реализованная. И, конечно, вовсе не привязанная именно к истребителю пятого поколения. Более того, давно состоящие на вооружении истребители вертикального взлёта и посадки активно используют управление вектором тяги.
Управление вектором тяги применяется в двигателях целого ряда ракет самого различного назначения. В том числе, некоторые ракеты воздух-воздух используют двигатели с отклоняемым соплом, позволяющие ракете лучше маневрировать в полёте.
Отклоняемое сопло в двигателях, предназначенных для истребителей пятого поколения, также служит для улучшения маневренных показателей. При этом управление вектором возможно как в одной плоскости (наиболее распространённое сейчас решение), так и в “трёх измерениях”. Фото “управляющих вектором” сопел:

(На фото – сопло двигателя прототипа F-22, Bartholomew Hott, George E. Pollock)

(На этом фото – сопла перспективного двигателя 117С НПО “Сатурн”)
()
Похожие записки:
dxdt.ru
Отклоняемый вектор тяги Википедия
Авиационный турбореактивный двухконтурный двигатель АЛ-41Ф1 с всеракурсно управляемым вектором тягиУправление вектором тяги (УВТ) реактивного двигателя — отклонение реактивной струи двигателя от направления, соответствующего крейсерскому режиму.
В настоящее время управление вектором тяги обеспечивается, в основном, за счёт поворота всего сопла или его части.
История разработки[ | ]
Первые опыты, связанные с практической реализацией изменяемого вектора тяги на самолётах, относятся к 1957 году и проводились в Великобритании в рамках программы по созданию боевого самолёта с вертикальным взлётом и посадкой. Прототип под обозначением Р.1127 был оснащён двумя поворачивающимися на 90° соплами, расположенными по бокам самолёта на линии центра тяжести, которые обеспечивали движение в вертикальном, переходном и горизонтальном режимах полёта. Первый полёт Р.1127 состоялся в 1960 году, а в 1967 году на его базе был создан первый серийный СВВП «Харриер».
Существенным шагом вперёд в разработке двигателей с изменяемым вектором тяги в рамках программ СВВП стало создание в 1987 советского сверхзвукового СВВП Як-41. Принципиальной отличительной чертой данного самолёта стало наличие трёх двигателей: двух подъёмных и одного подъёмно-маршевого с поворотным соплом, расположенным между хвостовыми балками. Трёхсекционная конструкция сопла подъёмно-маршевого двигателя делала возможным поворот вниз от горизонтального положения на 95°. \
- Расширение манёвренных характеристик
Ещё в ходе работ над Р.1127 испытателями было замечено, что использование отклоняемого вектора тяги в полёте несколько облегчает маневрирование самолёта. Однако из-за недостаточного уровня развития технологии и приоритетности программ СВВП серьёзные работы в области повышения манёвренности за счёт ОВТ не велись до конца 1980-х годов.
В 1988 году на базе истребителя F-15B был создан экспериментальный самолёт с двигателями с плоскими соплами и отклонением вектора тяги в вертикальной плоскости. Результаты испытательных полётов показали высокую эффективность ОВТ для повышения управляемости самолёта на средних и больших углах атаки.
Приблизительно в то же время в Советском Союзе был разработан двигатель с осесимметрическим отклонением сопла кругового сечения, работы над которым велись параллельно с работами над плоским соплом с отклонением в вертикальной плоскости. Поскольку установка плоского сопла на реактивный двигатель сопряжена с потерей 10-15 % тяги, предпочтение было отдано круглому соплу с осесимметрическим отклонением, и в 1989 году состоялся первый полёт истребителя Су-27 с экспериментальным двигателем.
Принцип действия[ | ]
ru-wiki.ru
Управляемый вектор тяги Википедия
Авиационный турбореактивный двухконтурный двигатель АЛ-41Ф1 с всеракурсно управляемым вектором тягиУправление вектором тяги (УВТ) реактивного двигателя — отклонение реактивной струи двигателя от направления, соответствующего крейсерскому режиму.
В настоящее время управление вектором тяги обеспечивается, в основном, за счёт поворота всего сопла или его части.
История разработки[ | ]
Первые опыты, связанные с практической реализацией изменяемого вектора тяги на самолётах, относятся к 1957 году и проводились в Великобритании в рамках программы по созданию боевого самолёта с вертикальным взлётом и посадкой. Прототип под обозначением Р.1127 был оснащён двумя поворачивающимися на 90° соплами, расположенными по бокам самолёта на линии центра тяжести, которые обеспечивали движение в вертикальном, переходном и горизонтальном режимах полёта. Первый полёт Р.1127 состоялся в 1960 году, а в 1967 году на его базе был создан первый серийный СВВП «Харриер».
Существенным шагом вперёд в разработке двигателей с изменяемым вектором тяги в рамках программ СВВП стало создание в 1987 советского сверхзвукового СВВП Як-41. Принципиальной отличительной чертой данного самолёта стало наличие трёх двигателей: двух подъёмных и одного подъёмно-маршевого с поворотным соплом, расположенным между хвостовыми балками. Трёхсекционная конструкция сопла подъёмно-маршевого двигателя делала возможным поворот вниз от горизонтального положения на 95°. \
- Расширение манёвренных характеристик
Ещё в ходе работ над Р.1127 испытателями было замечено, что использование отклоняемого вектора тяги в полёте несколько облегчает маневрирование самолёта. Однако из-за недостаточного уровня развития технологии и приоритетности программ СВВП серьёзные работы в области повышения манёвренности за счёт ОВТ не велись до конца 1980-х годов.
В 1988 году на базе истребителя F-15B был создан экспериментальный самолёт с двигателями с плоскими соплами и отклонением вектора тяги в вертикальной плоскости. Результаты испытательных полётов показали высокую эффективность ОВТ для повышения управляемости самолёта на средних и больших углах атаки.
Приблизительно в то же время в Советском Союзе был разработан двигатель с осесимметрическим отклонением сопла кругового сечения, работы над которым велись параллельно с работами над плоским соплом с отклонением в вертикальной плоскости. Поскольку установка плоского сопла на реактивный двигатель сопряжена с потерей 10-15 % тяги, предпочтение было отдано круглому соплу с осесимметрическим отклонением, и в 1989 году состоялся первый полёт истребителя Су-27 с экспериментальным двигателем.
Принцип действия[ | ]
ru-wiki.ru
Управление вектором тяги Википедия
Авиационный турбореактивный двухконтурный двигатель АЛ-41Ф1 с всеракурсно управляемым вектором тягиУправление вектором тяги (УВТ) реактивного двигателя — отклонение реактивной струи двигателя от направления, соответствующего крейсерскому режиму.
В настоящее время управление вектором тяги обеспечивается, в основном, за счёт поворота всего сопла или его части.
История разработки[ | ]
Первые опыты, связанные с практической реализацией изменяемого вектора тяги на самолётах, относятся к 1957 году и проводились в Великобритании в рамках программы по созданию боевого самолёта с вертикальным взлётом и посадкой. Прототип под обозначением Р.1127 был оснащён двумя поворачивающимися на 90° соплами, расположенными по бокам самолёта на линии центра тяжести, которые обеспечивали движение в вертикальном, переходном и горизонтальном режимах полёта. Первый полёт Р.1127 состоялся в 1960 году, а в 1967 году на его базе был создан первый серийный СВВП «Харриер».
Существенным шагом вперёд в разработке двигателей с изменяемым вектором тяги в рамках программ СВВП стало создание в 1987 советского сверхзвукового СВВП Як-41. Принципиальной отличительной чертой данного самолёта стало наличие трёх двигателей: двух подъёмных и одного подъёмно-маршевого с поворотным соплом, расположенным между хвостовыми балками. Трёхсекционная конструкция сопла подъёмно-маршевого двигателя делала возможным поворот вниз от горизонтального положения на 95°. \
- Расширение манёвренных характеристик
Ещё в ходе работ над Р.1127 испытателями было замечено, что использование отклоняемого вектора тяги в полёте несколько облегчает маневрирование самолёта. Однако из-за недостаточного уровня развития технологии и приоритетности программ СВВП серьёзные работы в области повышения манёвренности за счёт ОВТ не велись до конца 1980-х годов.
В 1988 году на базе истребителя F-15B был создан экспериментальный самолёт с двигателями с плоскими соплами и отклонением вектора тяги в вертикальной плоскости. Результаты испытательных полётов показали высокую эффективность ОВТ для повышения управляемости самолёта на средних и больших углах атаки.
Приблизительно в то же время в Советском Союзе был разработан двигатель с осесимметрическим отклонением сопла кругового сечения, работы над которым велись параллельно с работами над плоским соплом с отклонением в вертикальной плоскости. Поскольку установка плоского сопла на реактивный двигатель сопряжена с потерей 10-15 % тяги, предпочтение было отдано круглому соплу с осесимметрическим отклонением, и в 1989 году состоялся первый полёт истребителя Су-27 с экспериментальным двигателем.
Принцип действия[ | ]
ru-wiki.ru