
Десантный планер Г-11 (Гр-29) (СССР)
«Краткая справка: Советский десантный планер Г-11 (Гр-29) конструкции В. Грибовского. История создания, конструкция и применение.»
Мирный планер в военных целях
Отсутствие в нужном количестве мощных авиадвигателей с одной стороны, и большой опыт создания многоместных планеров с другой стороны, делали очень заманчивой идею их военного применения. Успехи СССР в этом деле и правда были значительными: большинство мировых рекордов для малых планеров в 30-е годы принадлежали советским пилотам, да и многоместные модели уже не только летали, но и находились в серийном производстве.
Наиболее распространенными в воздушно-десантных войсках Красной Армии в 1941 году, были планеры А-7 (Антонов) и Г-11 (Гр-29) конструкции Владислава Константиновича Грибовского. И тех и других было построено до нескольких сотен единиц, и те и другие хорошо зарекомендовали себя в транспортно-десантных операциях по снабжению партизан оружием, боеприпасами, провиантом и медикаментами.
Десантный планер Г-11 (Гр-29). История создания и конструкция.
Планер Г-11 (Гр-29) был создан в 1941 году. Он имел простую и дешевую конструкцию и представлял собой свободнонесущий высокоплан, изготовленный в основном из дерева. Приборное оборудование включало указатель скорости, вариометр, высотомер и часы. Г-11 обладал высокой весовой отдачей — масса полезной нагрузки была равна массе конструкции. В воздух он мог поднять 10 бойцов в полном снаряжении. Кабина пилота ничем не отделялась от салона. Вдоль каждого борта было укреплено 5 скамеек, которые складывались при перевозке грузов.
Схема десантного планера Г-11 (Гр-29)
Полет на буксире за самолетом СБ, Ил-4 или Ли-2 за линию фронта осуществлялся со скоростью не более 280 км/ч. После отцепки от самолета в заданном районе Г-11 бесшумно планировал со скоростью 146 км/ч.
Полеты в тыл противника обычно осуществлялись ночью. Их выполняли специально подготовленные пилоты-планеристы. Для ночной посадки слева под центропланом на специальном кронштейне крепилась фара.
Обычно десантные планеры имели одноразовое боевое применение. На них партизанам доставлялись грузы с посадкой на такие небольшие по размерам площадки, что взлет с них буксирного авиапоезда был невозможен, и планер после разгрузки приходилось уничтожать, за редким исключением.
Характеристики Г-11 (Гр-29) | |
|---|---|
| Страна: | СССР |
| Тип: | Десантный планер |
| Год выпуска: | 1941 г. |
| Экипаж: | 1 пилот + 10 десантников |
| Двигатель: | Нет |
| Максимальная скорость: | планирования: 146 км/ч, буксировки: до 300 км/ч |
| Практический потолок: | Нет сведений |
| Дальность полета: | — |
| Масса пустого: | Нет сведений |
| Максимальная взлетная масса: | 2400 кг |
| Размах крыльев: | 18 м |
| Длина: | 9,8 м |
| Высота: | Нет сведений |
| Площадь крыла: | Нет сведений |
| Вооружение: | Нет |
Модификации планера Г-11 (Гр-29).

В 1942 году на основе десантного планера Г-11 (Гр-29) был создан мотопланер Г-30 (Г-11М). На нем устанавливался двигатель М-11 с тянущим винтом. В отличие от безмоторных летательных аппаратов, Г-30 можно было использовать многократно. Но по различным причинам его испытания не проводились.
Источник: компиляция по информации из открытых источников сети интернет, цифры и факты даны по книге В.Е.Юденок. Самолеты СССР Второй мировой войны.
Десантный планер А-7 (СССР) | Армии и Солдаты. Военная энциклопедия
«Краткая справка: Боевое применение и особенности конструкции советских десантных планеров А-7 времен Второй Мировой войны»
Десантные планеры в СССР
В 30-е годы у СССР уже был успешный опыт применения воздушного десанта. О перспективности и важности такого способа доставки солдат во вражеский тыл было понятно с самого начала, однако здорово мешала широкому применению воздушных десантов одна сугубо техническая проблема, — не было подходящего двигателя.
С началом Великой Отечественной войны вопрос встал особо остро, и вот тогда, вспомнили об таком мирном изобретении, как планер. Их преимуществами перед другими летательными аппаратами были бесшумность полета, приспособленность к посадке на самые малые аэродромы, простота и экономичность производства.
К 1939 году в Советском Союзе было создано немало первоклассных спортивных планеров. Огромный опыт, накопленный при их создании и эксплуатации здорово пригодился конструкторам при разработке десантных планеров.
В соответствии с требованиями к военно-транспортной технике того времени, планер должен был быть приспособлен для посадки на неподготовленный аэродром. Наиболее удачными безмоторными летательными аппаратами были выпускавшиеся серийно: 7-местный А-7 конструкции Олега Константиновича Антонова, 20-местный Кц-20 Д.Н.Колесникова и П.В.Цыбина, а также 11-местный Г-11 (Гр-29) В.К.Грибовского.
Десантный планер А-7.
 Создание и конструкция.
Создание и конструкция.Всего планеров их было изготовлено более тысячи, из них наибольшее распространение в воздушно-десантных войсках СССР получил планер конструкции Антонова. Его проект под названием
Чертеж десантного планера А-7
Работы по его созданию выполнялись коллективом конструкторов в г. Каунас (Литва), но были прерваны в связи с началом войны. Проектирование и изготовление планера, получившего обозначение А-7, было закончено в Москве летом 1941 года. После успешного окончания испытаний зимой 1942 года он был запущен в серию и стал поступать на вооружение воздушно-десантных войск.
Планер А-7 представлял собой свободнонесущий моноплан деревянной конструкции с верхним расположением крыла. Для управления планером при буксировке и в свободном планировании в кабине пилота были размещены рычаги ручного и ножного управления.
Характеристики А-7 | |
|---|---|
| Страна: | СССР |
| Тип: | Десантный планер |
| Год выпуска: | 1941 г. |
| Экипаж: | 1 пилот, 7 десантников |
| Двигатель: | Нет |
| Максимальная скорость: | скорость буксировки — до 300 км/ч |
| Практический потолок: | Нет сведений |
| Дальность полета: | — |
| Масса пустого: | Нет сведений |
| Максимальная взлетная масса: | 1875 кг |
| Размах крыльев: | 18 м |
| Длина: | 10,54 м |
| Высота: | Нет сведений |
| Площадь крыла: | Нет сведений |
| Вооружение: | Нет |
Боевое применение планеров А-7
Десантные планеры использовались на фронтах Великой Отечественной войны в ряде операций по перевозке людей и снабжению партизан оружием, боеприпасами, провиантом и медикаментами. Такие операции, в частности, проводились в 1943 году на Калининском фронте.
Такие операции, в частности, проводились в 1943 году на Калининском фронте.
С 6 по 20 марта 1943 года планерно-десантное подразделение 3-й воздушной армии, размещавшееся на прифронтовом аэродроме в районе Старой Тропы, вблизи Великих Лук, совершило 96 боевых вылетов с целью оказания помощи партизанам.
В операции принимало участие 35 планеров А-7, и 30 планеров Г-11. За 12 суток по ночам к партизанам было переброшено 50 т боеприпасов, 150 бойцов-подрывников и 106 человек командного состава, а также специальное оборудование для партизанской и подпольной работы, в том числе 5 типографий и 16 радиостанций.
Источник: компиляция по информации из открытых источников сети интернет, цифры и факты даны по книге В.Е.Юденок. Самолеты СССР Второй мировой войны.
| Десантный планер А-7 |
 Было выпущено около 400 планеров данного типа, из которых формировались соответствующие подразделения в авиации.
Было выпущено около 400 планеров данного типа, из которых формировались соответствующие подразделения в авиации.
Информация. Первый в мире десантный планер спроектировали и построили в 1932 году в Москве, под руководством инженера Б. Урлапова. Бойцы размещались в толще крыла — головой вперед, по восемь человек в каждом полукрыле, слева и справа от фюзеляжа. В нужном месте бойцы десантировались на парашютах.
Серийное производство планеров начиналось на заводе в Тушино и на бывшем ремонтном заводе ГВФ в Быково, которые были эвакуированы в Тюмень в конце 1941 года. В конце 1942 году по причине тяжелых условий работы, постройка планеров в Тюмени была прекращена с переводом в поселок Заводоуковск Тюменской области. Завод был создан на базе ОКБ-31 Москалева. В начале 1943 года Антонов перешел в ОКБ Яковлева, а все работы по А-7 принял Москалев. Кроме того, создание планеров было организовано в Алапаевске Свердловской области.
Завод был создан на базе ОКБ-31 Москалева. В начале 1943 года Антонов перешел в ОКБ Яковлева, а все работы по А-7 принял Москалев. Кроме того, создание планеров было организовано в Алапаевске Свердловской области.
Модификация А-7М с вместимостью 14 человек была разработана и построена в 1943 году. Второй экземпляр А-7М с доработками построили во второй половине 1943 года. Испытания планера проходили до начала 1944 года, затем в январе 1944 года его передали на заводские испытания в ВДВ, проводившиеся до июня 1944 года. Сохраняя недостатки А-7, новый планер имел те же характеристики управляемости и устойчивости. Под названием АМ-14 была построена небольшая серия этого планера, который так и не успел принять участие в боевых действиях. Кроме базового варианта планера А-7 в небольших количествах были также созданы:
- учебные с двойным управлением — А-7У;
- штурманские — А-7Ш;
- планер-бензовоз А-7 (1 единица) — для увеличения радиуса действия бомбардировщиков.

В общей сложности было выпущено около 400 планеров А-7, поставки в войска которых начались в 1941 году.
Боевое применение
Десантные планеры применялись во время войны в ряде операций по снабжению партизан боеприпасами, провиантом и людьми. Так, в 1942 и 1943 годах аэродром «Киржач» был базой для 1-го планерного полка и 12-й воздушно-десантной дивизии. Там, соблюдая режим секретности, готовили десантников и пилотов грузовых планеров Г-11 и А-7 для выполнения спецзаданий. Всего в сентябре 1942 года на аэродромах «Киржач» и «Медвежьи озера» были сформированы два планерных авиаполка, которые имели на вооружении по 30 планеров и 12 буксировщиков. В 1942 году боевые планеристы стали летать к партизанам и в тыл противника на расстояние до 800 километров. Они доставляли на А-7 в брянские и белорусские леса газеты, медикаменты, боеприпасы, вывозили раненых.
В 1943 году на Калининском фронте также проводились операции. С 6 по 20 марта 1943 года планерно-десантное подразделение 3-й воздушной армии, базировавшееся на прифронтовом аэродроме в районе Старая Тропа, вблизи Великих Лук, провело операцию по снабжению партизан. В операции участвовали 35 планеров А-7 и 30 планеров ГР-29. По ночам к партизанам за 12 суток было доставлено 50 тонн боеприпасов, 150 бойцов-подрывников и 106 человек руководящего состава, а также спецоборудование для партизанской и подпольной работы, включая 5 типографий и 16 радиостанций. Все это было доставлено за 96 боевых вылетов. Буксировщиками были двухмоторные бомбардировщики ДБ-3Ф и СБ.
| Длина, м | 10,54 |
| Размах крыла, м | 18,00 |
| Высота, м | 1,53 |
| Площадь крыла, м2 | 23,20 |
| Масса, кг | |
| пустого | 955 |
| взлетный | 1760 |
Полезная нагрузка, чел. |
6 |
| Экипаж, чел. | 1 |
| Скорость буксировки, км/ч | 300 |
| Скорость планирования, км/ч | 400 |
Источники:
- А.П.Красильщиков. Планера СССР.
- В.Б.Казаков. Боевые Аэросцепки.
- О.К.Антонов. Десять раз с начала.
| < Назад | Вперед > |
|---|
Цыбин Павел Владимирович и его планеры
Цыбин Павел Владимирович (1905–1992) – советский учёный, авиаконструктор, инженер-полковник в отставке. В 1926 году Цыбин поступает в 1-ю советскую авиационную школу в Гатчине на отделение авиатехников. После окончания школы последовала работа в отделе учебных заведений Управления ВВС РККА, затем служба в Пермской школе лётчиков и техников морской авиации. В 1938 году он был уже комбригом. В 1939 году Цыбин был переведён в Москву и поступил в Военно-Воздушную академию имени Н.Е. Жуковского. Во время войны работал над созданием десантных планеров КЦ-20, Ц-5, Ц-25. С 1944 г. руководил КБ и заводом в Бескудникове под Москвой, где создавался новый тяжелый десантный планер Ц-25. В 1945–1948 гг. в ОКБ П.В. Цыбина по заданию Летно-исследовательского института были созданы «летающие лаборатории» Ц-1 (ЛЛ-1, ЛЛ-2 и ЛЛ-3) для исследования аэродинамики околозвуковых скоростей. Впоследствии работал главным конструктором ОКБ-256, где руководил созданием высотного сверхзвукового стратегического реактивного самолёта-разведчика РСР, затем в ОКБ-1 Королёва, где выполнил первый в СССР проект крылатого возвращаемого многоразового пилотируемого космического корабля-космоплана («Лапоток») запускаемого на ракете-носителе Восток, сконструировал первый советский спутник-разведчик «Зенит», работал над спутником связи «Молния», космическими кораблями «Союз» и «Союз-Т».
В 1938 году он был уже комбригом. В 1939 году Цыбин был переведён в Москву и поступил в Военно-Воздушную академию имени Н.Е. Жуковского. Во время войны работал над созданием десантных планеров КЦ-20, Ц-5, Ц-25. С 1944 г. руководил КБ и заводом в Бескудникове под Москвой, где создавался новый тяжелый десантный планер Ц-25. В 1945–1948 гг. в ОКБ П.В. Цыбина по заданию Летно-исследовательского института были созданы «летающие лаборатории» Ц-1 (ЛЛ-1, ЛЛ-2 и ЛЛ-3) для исследования аэродинамики околозвуковых скоростей. Впоследствии работал главным конструктором ОКБ-256, где руководил созданием высотного сверхзвукового стратегического реактивного самолёта-разведчика РСР, затем в ОКБ-1 Королёва, где выполнил первый в СССР проект крылатого возвращаемого многоразового пилотируемого космического корабля-космоплана («Лапоток») запускаемого на ракете-носителе Восток, сконструировал первый советский спутник-разведчик «Зенит», работал над спутником связи «Молния», космическими кораблями «Союз» и «Союз-Т».
Рассказывает внук П.В. Цыбина Иван Цыбин:
«Эпизод военной биографии деда:
Сентябрь 1942 года, при взлёте с аэродрома в Раменском, по маршруту Раменское – Медвежьи озёра, произошла катастрофа сцепки самолёт Ил-4 – планёр КЦ-20. У самолёта заглох двигатель, но пилот планёра Корчагин не отцепил трос, думая, что сейчас двигатель снова запустят и всё далее пойдёт штатно. Но двигатель Ил-4 так и не запустился, и сцепка рухнула в берег Москвы-реки. Пилот Корчагин погиб из-за того, что успел привязаться ремнями к креслу, а П.В. Цыбин, сидевший на правом кресле пристегнуться не успел, что и спасло ему жизнь – он, при ударе, вылетел наружу, пробив своей головой и телом фанерную обшивку планёра. Врачи были уверены, что Цыбин не выживет, но дед выкарабкался.».
Легкий десантный планер DFS.230 — Планерный клуб Бузовая
В 4.30 утра 10 мая 1940 г. 82 самолета поднялись с аэродромов Остхейма и Вутцвейлерхофа на окраинах Кельна, начав тем самым самую смелую воздушную операцию 2-й мировой войны. Успех этой операции был обеспечен применением принципиального нового средства ведения войны — десантного планера. 41 машина, из стартовавших с двух аэродромов Кельна, были десантными планерами DFS.230a. Остальные самолеты были буксировщиками Ju.52/3m.
Успех этой операции был обеспечен применением принципиального нового средства ведения войны — десантного планера. 41 машина, из стартовавших с двух аэродромов Кельна, были десантными планерами DFS.230a. Остальные самолеты были буксировщиками Ju.52/3m.
Они принадлежали первой воздушно-десантной эскадре люфтваффе — первой боевой части такого рода в мире. Каждый планер нес десантников, задачей которых был захват фортов Эбен-Эмануэль и мостов Канне, Вельдвецельт и Вроенховен и удержание их до подхода основных сил. Первая операция с участием десантных планеров была настолько удачной, что практически все ведущие авиационные державы тут же последовали примеру Германии, начав проектирование и производство десантных и грузовых планеров. Министерство авиации, которое до того испытывало большие сомнения относительно боевой ценности «ластензеглеров» — грузовых планеров — сразу потребовало срочно приступить к созданию более крупных машин.
DFS.230 был спроектирован Гансом Якобсом в обстановке повышенной секретности и совершил свой первый полет в конце 1937 г.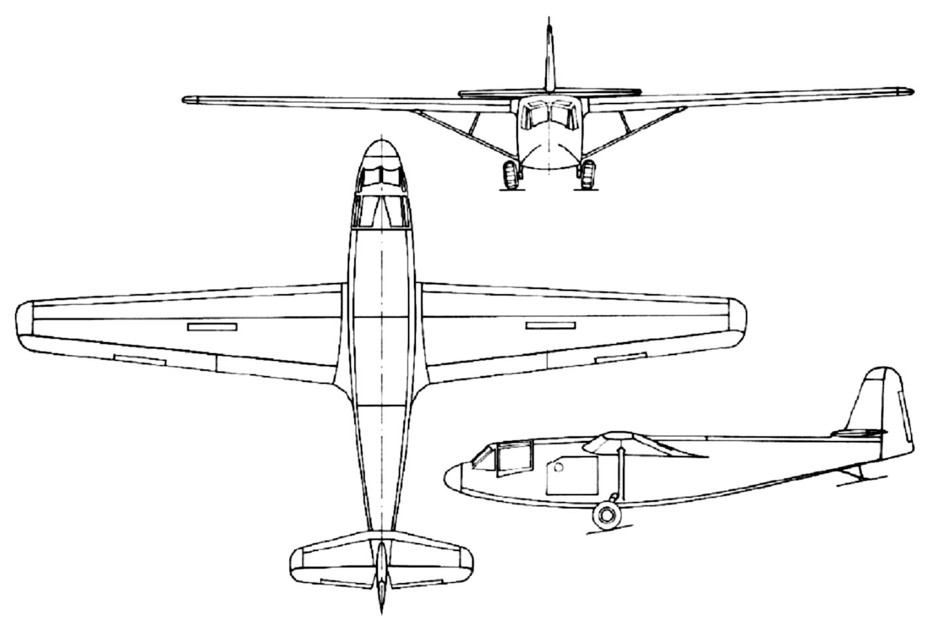 Планер был задуман еще на «Роон росситтен гезельшафт» и вел свою родословную от большого планера середины 30-х годов, предназначенного для аэродинамических исследований. Во время визита в Грисхейм Эрнст Удет увидел полет планера на буксире за Ju.52/Зm. Особое впечатление на него произвела точность приземления планера. После этого Удет заметил своему товарищу по 1-й мировой Роберту Риттер фон Грейму, что большой планер, вроде того, что он видел в Грисхейме, после соответствующих доработок мог бы стать своеобразным эквивалентом деревянного троянского коня, доставляя скрытно в тыл врага десантников. Через несколько недель после этого разговора ДФС получил заказ на проектирование и постройку планера, способного поднять пилота и девять полностью экипированных солдат.
Планер был задуман еще на «Роон росситтен гезельшафт» и вел свою родословную от большого планера середины 30-х годов, предназначенного для аэродинамических исследований. Во время визита в Грисхейм Эрнст Удет увидел полет планера на буксире за Ju.52/Зm. Особое впечатление на него произвела точность приземления планера. После этого Удет заметил своему товарищу по 1-й мировой Роберту Риттер фон Грейму, что большой планер, вроде того, что он видел в Грисхейме, после соответствующих доработок мог бы стать своеобразным эквивалентом деревянного троянского коня, доставляя скрытно в тыл врага десантников. Через несколько недель после этого разговора ДФС получил заказ на проектирование и постройку планера, способного поднять пилота и девять полностью экипированных солдат.
Конструкция DFS.230 была совершенно обычной. Крыло c одним лонжероном примерно до трети хорды, с деревянной обшивкой до него и тканевой за ним. Элероны с триммером также с тканевой обшивкой. Крыло с подкосами из легкого сплава. Фюзеляж квадратного сечения сварен из стальных труб и обшит тканью. Снизу шла мощная балка, поглощавшая нагрузки от подрессоренной посадочной лыжи. Было предусмотрено двойное управление. Hа силовой балке сидели пилот и еще девять человек. Так как максимальный полетный вес был 2100 кг, включая 1200 кг нагрузки, то кроме 10 человек планер мог поднять еще 270 кг груза. В задней части кабины слева был грузовой люк. Загрузка могла происходить и через снимаемую панель под крылом справа. Для взлета использовалась двухколесная тележка, сбрасываемая после отрыва. С полной нагрузкой планер демонстрировал аэродинамическое качество 18. Все первые полеты проводились на буксире за Ju.52, но потом в качестве буксировщика испытывались и другие самолеты, включая Hе.46, Hs.126 и Ju.87b. Несколько полетов были совершены с использованием в качестве буксировщиков тренировочных бипланов Hе.72 «Кадет». Рассматривались и варианты с заменой гибкого троса на жесткий буксир. При этом DFS.230 крепился за нос с помощью 1.
Фюзеляж квадратного сечения сварен из стальных труб и обшит тканью. Снизу шла мощная балка, поглощавшая нагрузки от подрессоренной посадочной лыжи. Было предусмотрено двойное управление. Hа силовой балке сидели пилот и еще девять человек. Так как максимальный полетный вес был 2100 кг, включая 1200 кг нагрузки, то кроме 10 человек планер мог поднять еще 270 кг груза. В задней части кабины слева был грузовой люк. Загрузка могла происходить и через снимаемую панель под крылом справа. Для взлета использовалась двухколесная тележка, сбрасываемая после отрыва. С полной нагрузкой планер демонстрировал аэродинамическое качество 18. Все первые полеты проводились на буксире за Ju.52, но потом в качестве буксировщика испытывались и другие самолеты, включая Hе.46, Hs.126 и Ju.87b. Несколько полетов были совершены с использованием в качестве буксировщиков тренировочных бипланов Hе.72 «Кадет». Рассматривались и варианты с заменой гибкого троса на жесткий буксир. При этом DFS.230 крепился за нос с помощью 1. 5-м жесткого сцепления. Возможность практического применения жесткой системы буксировки была продемонстрирована на связке Ju.52 с DFS.230 во время ночного перелета Дармштадт-Гамбургюнхен-Дармштадт.
5-м жесткого сцепления. Возможность практического применения жесткой системы буксировки была продемонстрирована на связке Ju.52 с DFS.230 во время ночного перелета Дармштадт-Гамбургюнхен-Дармштадт.
С самого начала программы DFS.230 институт активно сотрудничал с «Готаер вагонфабрик», которая была определена головной по выпуску планера, хотя работы и шли очень медленно из-за затянувшихся сомнений РЛМ относительно практической ценности планеров. Крикливые противники заявляли, что планер не дает ничего лучшего по сравнению с парашютом, который стоит значительно дешевле. Три опытных DFS.230-V1, V2 и VЗ были собраны и испытаны в институте. За ними последовала небольшая серия на ГВФ из DFS.230a-0. Далее последовали DFS.230a-1 и a-2, имевшие двойное управление и сданные к октябрю 1939 г. Всего к концу года люфтваффе приняла только 28 планеров.
В течение осени 1938 г. в составе 7-го воздушного дивизиона была сформирована небольшая планерная команда на базе предсерийных DFS.230. Команда занималась освоением десантной тактики прежде, чем планеры поступили на оснащение парашютных войск 9-го воздушного корпуса. С разворачиванием производства DFS.230 в начале 1940 г. был сформирован 1-й полк 1-й воздушно-десантной эскадры. Вслед за его успехом в майской операции были сформированы 2-й и 3-й полки. К производству планеров были подключены концерны «Гартвиг» в Зоннебурге, «Эрла» в Лейпциге и завод в Праге. В течение 1940 г. в состав люфтваффе поступили 455 десантных планеров, в основном модификации DFS.230a-1. Вслед за этой версией последовали DFS.230b-1 и b-2 с двойным управлением, модернизированные с учетом опыта боевых действий.
С разворачиванием производства DFS.230 в начале 1940 г. был сформирован 1-й полк 1-й воздушно-десантной эскадры. Вслед за его успехом в майской операции были сформированы 2-й и 3-й полки. К производству планеров были подключены концерны «Гартвиг» в Зоннебурге, «Эрла» в Лейпциге и завод в Праге. В течение 1940 г. в состав люфтваффе поступили 455 десантных планеров, в основном модификации DFS.230a-1. Вслед за этой версией последовали DFS.230b-1 и b-2 с двойным управлением, модернизированные с учетом опыта боевых действий.
Так выяснилось, что при отсутствии эффекта внезапности десантирование на планере было очень рискованным предприятием, так как он представлял собой отличную цель для стрелкового оружия во время медленною планирования по прямой при посадке. В результате DFS.230b был оснащен парашютом под нижней частью фюзеляжа, который использовался для быстрого снижения на пикировании при уклонении от зенитного огня. Кроме того, был установлен тормозной парашют. Конструкция планера была усилена, а крепление посадочной лыжи стало жестким. Была предусмотрена установка и одного 7.9 мм пулемета МG-15 сразу за фонарем кабины. Он обеспечивал оборону планера в полете и при спешивании десанта. Некоторые планеры оснащались и парой МG-34 пехотного образца, которые крепились к носу и использовались для огневой поддержки при посадке. В течение года после своего дебюта при вторжении во Францию части, оснащенные DFS.230, использовались в основном для грузовых перевозок. Вновь в роли десантных они были использованы 26 апреля 1941 г., когда приняли участие в попытке захватить мост над Коринфским каналом. Эта операция была только прелюдией к одной из самых знаменитых десантных операций немецких войск, в которой приняли участие и планеры — вторжению на Крит. Она началась 20 мая 1941 г. В ней приняли участие не меньше 493 Ju.52/Зm и 80 планеров DFS.230, доставившие на остров 15750 человек. Хотя операция и закончилась полным успехом, эта «пиррова победа» была достигнута с большими потерями десантных сил.
Была предусмотрена установка и одного 7.9 мм пулемета МG-15 сразу за фонарем кабины. Он обеспечивал оборону планера в полете и при спешивании десанта. Некоторые планеры оснащались и парой МG-34 пехотного образца, которые крепились к носу и использовались для огневой поддержки при посадке. В течение года после своего дебюта при вторжении во Францию части, оснащенные DFS.230, использовались в основном для грузовых перевозок. Вновь в роли десантных они были использованы 26 апреля 1941 г., когда приняли участие в попытке захватить мост над Коринфским каналом. Эта операция была только прелюдией к одной из самых знаменитых десантных операций немецких войск, в которой приняли участие и планеры — вторжению на Крит. Она началась 20 мая 1941 г. В ней приняли участие не меньше 493 Ju.52/Зm и 80 планеров DFS.230, доставившие на остров 15750 человек. Хотя операция и закончилась полным успехом, эта «пиррова победа» была достигнута с большими потерями десантных сил.
DFS.230 в течение 1941 г. еще выпускались в Чехословакии, но «Готхаер ваггонфабрик» прекратила их производство в начале года, поставив только три планера в январе и один в феврале, правда, выпустив еще 28 планеров в июне.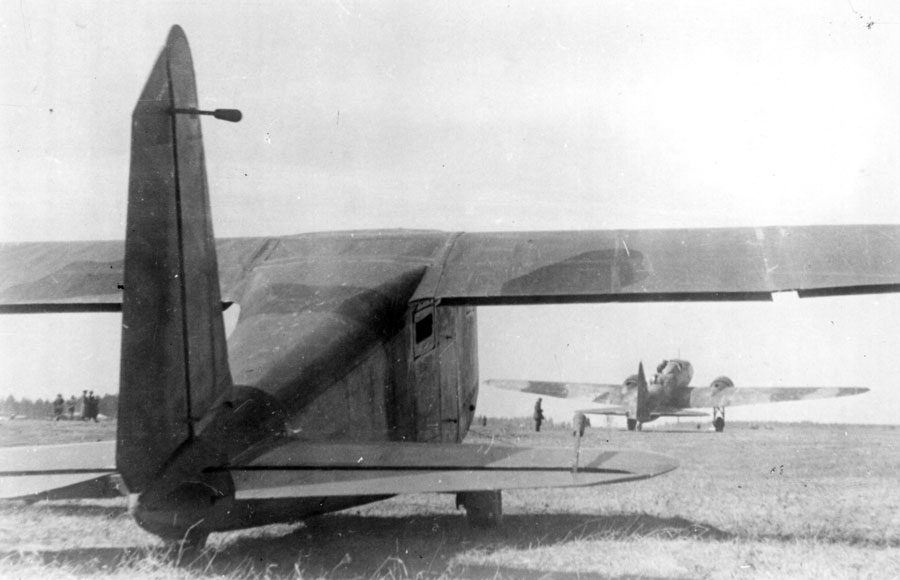 Тем не менее, из пяти сборочных линий было принято более 1022 DFS.230, в том числе 322 было произведено в Чехословакии. С лета 1941 г. к нему присоединился более крупный Go.242. К началу 1942 г. планеры DFS.230 выпускал только завод в Праге, но и он прекратил выпуск после серии из 74 планеров.
Тем не менее, из пяти сборочных линий было принято более 1022 DFS.230, в том числе 322 было произведено в Чехословакии. С лета 1941 г. к нему присоединился более крупный Go.242. К началу 1942 г. планеры DFS.230 выпускал только завод в Праге, но и он прекратил выпуск после серии из 74 планеров.
В основном планер состоял в эскадрильях люфтваффе 1.-10./DFS.230. Большинство из них вместе с 1.-6./Gо.242 были сведены в 1, 2 и 3-й планерные полки, в воздушно-десантные эскадры LLG 1 и LLG 2 и несколько отдельных «буксирных» эскадрилий. DFS.230 активно использовался как на средиземноморском театре, так и на Восточном фронте. Первой крупной операцией на последнем было снабжение окруженном гарнизона города Холма между январем и маем 1942г. Hа последней стадии операции перед прорывом блокады планеры были вынуждены садиться сквозь «улицу» огня, неся тяжелые потери в планерах и людях.
Для буксировки DFS.230 обычно использовался трос длиной 40 м, но ночью и в плохих погодных условиях использовалась жесткая сцепка. Еще одним способом был предложенный в 1942 г. Фрицем Штамером и его группой из ДФС так называемый «Мистель» — при котором буксировщик крепился на спине планера. Первоначально использовался «Клемм» Kl.35b в качестве буксировщика на спине DFS.230b-2. Эта «этажерка» поднималась на буксире за Ju.52/Зm. Мощность двигателя Kl.35b была достаточной для полета состава на рабочей высоте. Далее в серии испытаний он был заменен на Fw.56 «Штессер», а в 1943 г. для этого стал использоваться Вf.109e-1, укрепленный на более сложной системе подкосов; планер при этом был оснащен специальным шасси вместо посадочной лыжи. Этот «состав» успешно прошел испытания и продемонстрировал возможность взлетать с помощью двигателя Вf.109e-1, но схема «Мистеля» так и не нашла применения в случае с DFS.230.
Еще одним способом был предложенный в 1942 г. Фрицем Штамером и его группой из ДФС так называемый «Мистель» — при котором буксировщик крепился на спине планера. Первоначально использовался «Клемм» Kl.35b в качестве буксировщика на спине DFS.230b-2. Эта «этажерка» поднималась на буксире за Ju.52/Зm. Мощность двигателя Kl.35b была достаточной для полета состава на рабочей высоте. Далее в серии испытаний он был заменен на Fw.56 «Штессер», а в 1943 г. для этого стал использоваться Вf.109e-1, укрепленный на более сложной системе подкосов; планер при этом был оснащен специальным шасси вместо посадочной лыжи. Этот «состав» успешно прошел испытания и продемонстрировал возможность взлетать с помощью двигателя Вf.109e-1, но схема «Мистеля» так и не нашла применения в случае с DFS.230.
Также проводились многочисленные эксперименты по посадке на очень маленькие площадки. С одного DFS.230 были сняты крылья, установлены шасси и простейшая конструкция крепления винта и сам 12-метровый винт с вертолета Fa. 223. Новый вариант получил обозначение Fa.225 и предназначался для посадки на ограниченные площадки в режиме авторотации. Он должен был буксироваться обычным тросом на скорости 185-250 км/ч. Вес Fa.225 составил 2000 кг, включая 1000 кг груза. Автожир мог садиться на площадку в 15-20 м. Правда, управляемость спроектированного всего за семь недель Fa.225 оказалась ниже желаемого. В результате предпочтение было отдано совершенно другому способу сокращения пробега, разработанному в ДФС и состоящему из последовательно включаемых тормозных ракет.
223. Новый вариант получил обозначение Fa.225 и предназначался для посадки на ограниченные площадки в режиме авторотации. Он должен был буксироваться обычным тросом на скорости 185-250 км/ч. Вес Fa.225 составил 2000 кг, включая 1000 кг груза. Автожир мог садиться на площадку в 15-20 м. Правда, управляемость спроектированного всего за семь недель Fa.225 оказалась ниже желаемого. В результате предпочтение было отдано совершенно другому способу сокращения пробега, разработанному в ДФС и состоящему из последовательно включаемых тормозных ракет.
Ракеты «Рейнметалл Борзиг» устанавливались в несколько измененной носовой части фюзеляжа. Пилот должен был на пикировании выбрать посадочную площадку, выпустить тормозной парашют и в момент касания включить первую из трех ракет. Оставшиеся ракеты срабатывали по очереди с возрастающей последовательностью. Три ракеты весьма эффективно тормозили планер, который проходил всего 15 метров при посадке. Еще более эффектными были пороховые газы, облако которых полностью скрывало планер. Специально для освобождения итальянского диктатора Бенито Муссолини из его тюрьмы — Гран Сассо Массир в Абруцци Молизе, небольшое число DFS.230b-1 было оснащено носовыми ракетами и получило обозначение DFS.230c-1. Вместе со «шторхом» Fi.156, который должен был вывезти Муссолини, DFS.230c-1 в составе «штурмового отряда Скорцени» доставили десантников во главе с гауптштурмфюрером СС Отто Скорцени на небольшой прямоугольный выступ, покрытый камнями. Это чрезвычайно сложное предприятие закончилось полным успехом благодаря именно планерам с ракетами. В результате ДФС тут же приступил к проектированию новой носовой секции, которой должны были оснастить уже выпущенные DFS.230b-1. Она включала установку новых ракет и устройства автоматического их включения в заданной последовательности. Ей оснастили DFS.230-V6. После доработок планер должен был получить обозначение DFS.230d-1, хотя этого и не произошло.
Специально для освобождения итальянского диктатора Бенито Муссолини из его тюрьмы — Гран Сассо Массир в Абруцци Молизе, небольшое число DFS.230b-1 было оснащено носовыми ракетами и получило обозначение DFS.230c-1. Вместе со «шторхом» Fi.156, который должен был вывезти Муссолини, DFS.230c-1 в составе «штурмового отряда Скорцени» доставили десантников во главе с гауптштурмфюрером СС Отто Скорцени на небольшой прямоугольный выступ, покрытый камнями. Это чрезвычайно сложное предприятие закончилось полным успехом благодаря именно планерам с ракетами. В результате ДФС тут же приступил к проектированию новой носовой секции, которой должны были оснастить уже выпущенные DFS.230b-1. Она включала установку новых ракет и устройства автоматического их включения в заданной последовательности. Ей оснастили DFS.230-V6. После доработок планер должен был получить обозначение DFS.230d-1, хотя этого и не произошло.
Тяжелые потери планерного полка и воздушно-десантного корпуса во время снабжения Холмского котла в первые месяцы 1942 г. привели к решению не использовать планеры для таких задач в аналогичном случае со Сталинградом. Однако, в начале 1943 г. ситуация так обострилась, что три полка 1-й эскадры были посланы в распоряжение 4-го воздушного флота. Для снабжения Сталинградского котла они не использовались, а были переброшены в январе 1943г. на керченский полуостров для организации «кубанского моста». К этому времени эскадра в своем составе имела полки: I/LLG.1 с DFS.230 и Do.17 в качестве буксировщиков, II/LLG.1 и III/LLG.1 с DFS.230 и с буксировщиками He.45, He.46 и Hs.126, полк из Go.242 и буксировщиков He.111, несколько Me.321 c He.111z. В течении боев на Кубани с января 1943г. по октябрь планерные эскадрильи понесли тяжелые потери, особенно в зимние месяцы из-за плохой погоды, так как не обладали соответствующим оборудованием и опытом.
привели к решению не использовать планеры для таких задач в аналогичном случае со Сталинградом. Однако, в начале 1943 г. ситуация так обострилась, что три полка 1-й эскадры были посланы в распоряжение 4-го воздушного флота. Для снабжения Сталинградского котла они не использовались, а были переброшены в январе 1943г. на керченский полуостров для организации «кубанского моста». К этому времени эскадра в своем составе имела полки: I/LLG.1 с DFS.230 и Do.17 в качестве буксировщиков, II/LLG.1 и III/LLG.1 с DFS.230 и с буксировщиками He.45, He.46 и Hs.126, полк из Go.242 и буксировщиков He.111, несколько Me.321 c He.111z. В течении боев на Кубани с января 1943г. по октябрь планерные эскадрильи понесли тяжелые потери, особенно в зимние месяцы из-за плохой погоды, так как не обладали соответствующим оборудованием и опытом.
Части с DFS.230 использовались для снабжения 1-й танковой армии из Лемберга (Львова). После двух операций по доставке грузов 1-й танковой армии они переключились на снабжение сил, окруженных под Тернополем. Огонь советской ПВО был настолько плотным, что полеты могли проходить только на рассвете и в сумерках. Планеры отцеплялись на высоте 2000-2500м и совершали полет самостоятельно, пока позиции советских зениток подвергались бомбежке. Несмотря на все усилия, 2-го планерного полка, 15 апреля Тернополь был взят советскими войсками.
Огонь советской ПВО был настолько плотным, что полеты могли проходить только на рассвете и в сумерках. Планеры отцеплялись на высоте 2000-2500м и совершали полет самостоятельно, пока позиции советских зениток подвергались бомбежке. Несмотря на все усилия, 2-го планерного полка, 15 апреля Тернополь был взят советскими войсками.
Вновь в похожей ситуации DFS.230 в основном из состава I/LLG.2 использовались с 28 декабря 1944 г. по 15 февраля 1945 г. для снабжения будапештского котла. Для буксировки использовались Do.17, но они имели только тросовый буксир, который не годился для полетов ночью и в плохих погодных условиях. Поэтому в распоряжении I/LLG.2 были переданы Hе.111h из 4-й эскадры. Бомбардировщики были оснащены жесткой системой буксировки и получили дополнительные экипажи опытных в этом деле пилотов, которые и летали на самолетах после выполнения бомбардировочных заданий. К 9 февраля аэродром Будапешта был сдан, и снабжение осуществлялось только сбросом грузов. В этих полетах из состава I/LLG. 2 были потеряны 36 DFS.230 и 12 Go.242, которых нельзя было вернуть после выполнения заданий.
2 были потеряны 36 DFS.230 и 12 Go.242, которых нельзя было вернуть после выполнения заданий.
Последняя операция с использованием DFS.230 была проведена в ночь на 23 марта 1945 г., когда попытались направить шесть планеров в Бреслау, который был в осаде. Через голову военного командования гауляйтер Ханке персонально радировал Борману в Рейхсканцелярию с просьбой доставить тяжелую артиллерию для противодействия советским войскам. Гитлер выделил шесть пехотных гаубиц калибром 150мм. Hо даже в разобранном виде их нельзя было перевести на Ju.52/Зm. В результате три орудия были погружены на планеры Go.242, а боеприпасы для них везли DFS.230. Один Go.242 и два DFS.230 были сбиты, но два орудия были доставлены и снабжались боеприпасами с помощью DFS.230 до самой капитуляции гарнизона.
В начале 1945 г. пять планерных эскадрильей еще числились на вооружении, но к 25 апреля в составе люфтваффе остались только 1-я, 2-я и 3-я эскадрильи LLG.1 в Кенигграце с тринадцатью DFS.230 и шестью Go. 242. В качестве буксировщиков числились три Ju.87, одиннадцать Do.17 и пятнадцать He.111.
242. В качестве буксировщиков числились три Ju.87, одиннадцать Do.17 и пятнадцать He.111.
Всего было произведено чуть больше 1500 DFS.230, включая 14, собранных в 1944 г. на заводе «Мрац» в Чосене.
Тактико-технические характеристики
| Размах крыла, м | 22,00 |
| Длина, м | 11,30 |
| Высота, м | 2,75 |
| Площадь крыла, м2 | 40,00 |
| Масса, кг — пустого — максимальная |
860 2100 |
| Максимальная скорость, км/ч | 290 |
| Скорость буксировки, км/ч — максимальная — нормальная |
210 180 |
| Полезная нагрузка | 10 человек |
Вооружение: один 7. 9 мм пулемет МG-15 на подвижной установке за кабиной и 2 7.9мм MG-34 неподвижно впереди по бокам фюзеляжа
9 мм пулемет МG-15 на подвижной установке за кабиной и 2 7.9мм MG-34 неподвижно впереди по бокам фюзеляжа
Десант, партизаны и антифриз. Десантно-транспортные планеры РККА
Планер А-7 конструкции О.К. Антонова — одна из основных машин своего класса. Фото Airwar.ru
В годы Второй мировой войны на вооружении ряда стран состояли транспортные и десантные планеры. Такая техника, отличаясь дешевизной и простотой производства и эксплуатации, могла перевозить людей и грузы, обеспечивая логистику или выполняя высадку десанта. РККА располагала несколькими типами планеров с разными характеристиками и достаточно активно использовала их почти на всем протяжении войны.
История развития
В двадцатых годах прошлого века в нашей стране завоевал популярность планерный спорт, тогда же началось изучение вопросов военного применения планеров. Однако реальные работы по десантно-транспортным планерам стартовали только в 1930 г. Первый период развития продолжался до середины тридцатых и не дал особых результатов.
 Ранние транспортные планеры не были массовыми и не использовались армией.
Ранние транспортные планеры не были массовыми и не использовались армией.Работы по этой теме возобновились уже в конце десятилетия, поводом для этого стали зарубежные разработки. В 1939 г. свой конкурс на разработку планера объявил Осоавиахим, а в 1940-м – недавно созданное Управление по производству десантно-транспортных планеров из состава Наркомата авиационной промышленности.
Участниками двух конкурсов стали несколько конструкторских коллективов. Несколько проектов отметили премиями и допустили к строительству опытной техники. Наиболее удачным во всех отношениях оказался планер «Рот Фронт-8» конструкции О.К. Антонова. В дальнейшем этот проект был улучшен, и получившийся планер А-7 пошел в серию. Другие проекты не продвинулись дальше испытаний прототипов.
Конструкция А-7 отличалась максимальной простотой и технологичностью. Фото Авиару.рф
В ноябре 1940 г. были введены новые штаты воздушно-десантных бригад. Они предусматривали высадку десанта с парашютом, посадочным способом с самолетов и при помощи планеров.
 Соответственно, армии потребовались новые образцы техники. Позже в Саратове открыли Военную авиационно-планерную школу, которой предстояло готовить летчиков-планеристов.
Соответственно, армии потребовались новые образцы техники. Позже в Саратове открыли Военную авиационно-планерную школу, которой предстояло готовить летчиков-планеристов.Начало Великой Отечественной войны подстегнуло работы по планерному направлению. Предлагались разные варианты техники для перевозки людей и разных грузов, вплоть до артиллерийских орудий и легких автомобилей. Предлагались и более смелые проекты, такие как набор плоскостей для легкого танка или планер-бензовоз, способный передавать горючее бомбардировщику-буксировщику и увеличивать его радиус действия. Впрочем, далеко не все новые разработки доходили до серии и строились в существенных количествах.
Планеры времен войны
В сентябре 1941 г. впервые взлетел планер А-7, созданный на основе более старого РФ-8. Это была цельнодеревянная машина с максимальным взлетным весом менее 1900 кг. Она управлялась одним пилотом и перевозила шестерых десантников. Производство было развернуто на нескольких заводах и продолжалось до 1944 г.
 В общей сложности РККА получила не менее 400 изделий А-7 (по другим данным, до 600). Создавались специализированные модификации с особыми возможностями.
В общей сложности РККА получила не менее 400 изделий А-7 (по другим данным, до 600). Создавались специализированные модификации с особыми возможностями.Не менее массовым стал планер Г-11 (он же Гр-29) конструкции В.К. Грибовского, созданный для конкурса 1940 г. При нормальной полетной массе 2,4 т такой планер вез 10 десантников и одного пилота. Испытания Г-11 провели в начале осени 1941 г., а в ноябре уже освоили серийный выпуск. До конца года армии передали 10 планеров. В 1944 г. появилась учебная модификация Г-11У с двойным управлением. Производство планеров Г-11 завершилось в середине 1945-го. За все время изготовили ок. 500 единиц.
Посадка десантников в А-7. Фото Авиару.рф
Сразу после начала войны Д.Н. Колесников и П.В. Цыбин разработали проект тяжелого планера КЦ (в дальнейшем появились варианты КЦ-2 и КЦ-20). Максимальный взлетный вес КЦ-20 превышал 4,4 т. Машина управлялась двумя летчиками и могла перевозить 18 десантников или сопоставимый груз. Производство серии КЦ завершили в конце 1943 г.
 Было построено, по разным данным, от 50 до 68 планеров.
Было построено, по разным данным, от 50 до 68 планеров.Два полка
Поставки серийных планеров в РККА начались в последних месяцах 1941 г. Техника поступала в бригады ВДВ и поначалу использовалась в качестве транспорта для перевозок в тылу. Малое ее количество пока исключало полноценное боевое применение в воздушно-десантных операциях. Такое положение дел сохранялось до весны 1942-го.
В феврале и марте 1942 г. на аэродром Стрыгино (Горьковская область) перебросили несколько планеров А-7 и Г-11, а также самолеты-буксировщики Р-6, ПС-84, СБ и ДБ-3Ф. Вскоре вышел приказ о формировании 1-го отдельного авиационно-планерного полка (1-й оапп), подчиненного непосредственно командованию ВДВ. Полк включал две эскадрильи, в которых присутствовало 10 буксировщиков и 60 планеров.
В августе того же года в г. Киржач (Ивановская обл.) сформировали 2-й учебный авиационно-планерный полк (через год переименован во 2-й отдельный авиационно-планерный). В его распоряжении имелись самолеты ДБ-3Ф / Ил-4, а также планеры Г-11 и А-7.
Планер Г-11. Фото Airwar.ru
В дальнейшем новые планерные части не формировались. Для решения поставленных задач в интересах армии и других формирований вполне хватало и такой группировки. В разное время два полка перевозили различные грузы в тылу и за линию фронта, а также обеспечивали высадку десантов.
Воздушный транспорт
Летом 1942 г. летчиков 1-го оапп привлекли к снабжению партизанских отрядов Брянской области. При помощи планеров в удаленные районы доставлялись различные грузы и специалисты. Впрочем, подобные вылеты производились не слишком часто и без какой-либо четкой системы.
В ноябре того же года два планерных полка стали главными участниками операции «Антифриз». В начале месяца в районе Сталинграда резко похолодало. Техника РККА оказалась неготовой к заморозкам и нуждалась в больших количествах антифриза – в минимальные сроки. Нужные ресурсы имелись в Московской области, но возникли трудности с переброской. Железная дорога и военно-транспортная авиация не могли справиться с поставленной задачей за приемлемое время.
Командование ВДВ предложило организовать снабжение войск при помощи планеров. 10 ноября два полка поднялись по тревоге и начали подготовку к полетам. Уже вечером 12 ноября состоялись первые вылеты. Буксировщики с загруженными планерами взлетали с аэродрома Медвежьи Озера (Московская обл.) и с несколькими промежуточными посадками добирались до Сталинградской области. Полет занимал до 8-9 часов и зачастую проходил в сложных метеоусловиях.
Кабина Г-11, вид вперед. На заднем плане видно кресло летчика, у бортов — лавки десанта. Фото Airwar.ru
В операции «Антифриз» использовались планеры Г-11 и А-7. Более крупные Г-11 брали на борт по шесть 200-л бочек с антифризом, легкие А-7 – вдвое меньше. До 16 ноября включительно планерные полки выполнили 60 полетов и перевезли ок. 50 т жидкостей и другие грузы. В ходе операции потеряли 3 буксировщика и 10 планеров. Несколько летчиков погибли. Ценой таких потерь удалось обеспечить снабжение действующей армии необходимыми ресурсами. Дальнейшие события под Сталинградом показали всю важность проведенной операции.

На рубеже 1942-43 гг. планеры вновь привлекались к снабжению войск в районе Сталинграда. Весной предпринимались попытки применения планеров в районе осажденного Ленинграда.
С марта 1943 г. основной работой двух планерных полков стало снабжение партизанских отрядов, в основном на территории Белоруссии. Полеты осуществлялись ночью, партизаны организовывали и размечали посадочные площадки. После посадки и разгрузки судьба планера прямо зависела от особенностей полевого «аэродрома». Если площадка позволяла сесть самолету-буксировщику, планер можно было вывезти вместе с ранеными или какими-либо грузами. В противном случае планер разбирали на материалы или попросту сжигали.
Всего за две недели марта 1943-го силами 2-го оапп партизанам районов Селявщина и Бегомль привезли 140 специалистов и руководителей, 3 т медикаментов, 4 т взрывчатых веществ, тысячи единиц стрелкового оружия и различные боеприпасы. В 60 вылетах потеряли 65 планеров (в основном из-за невозможности возвращения). Почти всех летчиков успешно вернули «на большую землю».
Почти всех летчиков успешно вернули «на большую землю».
Тяжелый планер КЦ-20. Фото Airwar.ru
Новая операция по снабжению партизан началась в конце апреля 1943 г. и продолжалась почти год. За это время партизанские отряды приняли 135 планеров всех основных типов со всеми необходимыми грузами. При этом планерные полки столкнулись с противодействием со стороны противника. Люфтваффе пытались перехватывать воздушный транспорт или следить за ним в поисках партизанских баз.
Десантная операция
Десантные планеры регулярно использовались для доставки в тыл врага диверсионно-разведывательных групп. При этом они лишь единожды участвовали в полномасштабной воздушно-десантной операции. Планеры вместе с другой техникой использовались для высадки тактического десанта на правом берегу р. Днепр 24-25 сентября 1943 г.
Для высадки десанта к операции привлекли 180 военно-транспортных самолетов разных типов. 1-й и 2-й оапп предоставили в общей сложности 35 планеров А-7 и Г-11. Сначала часть планеров использовалась для посадочного десантирования бойцов. В дальнейшем такую технику применяли для подвоза медикаментов и боеприпасов, эвакуации раненых и т.д. Операция в целом оказалась неудачной, но планеры вновь подтвердили свой потенциал – который можно было реализовать при правильном их применении.
В дальнейшем такую технику применяли для подвоза медикаментов и боеприпасов, эвакуации раненых и т.д. Операция в целом оказалась неудачной, но планеры вновь подтвердили свой потенциал – который можно было реализовать при правильном их применении.
Конец работы
В апреле 1944 г. летчики 1-го оапп совершили последний вылет для снабжения белорусских партизан. После этого подобные полеты не выполнялись. Фактически боевые операции с применением планеров завершились.
В июне 1-й оапп отвели в г. Клин. Осенью планерный полк переформировали в 208-й гвардейский авиаполк дальнего действия (208-й гв. апдд) и перевели на бомбардировщики Ил-4. 2-й оапп в тот же период стал 209-м гв. апдд. Планеры списали по выработке ресурса, а их пилотов распределили между летными школами первоначального обучения.
Планер Г-11 в качестве памятника в г. Шумерля. Фото Wikimedia Commons
Часть опытных летчиков в начале 1945 г. перевели во вновь созданный 45-й учебно-тренировочный авиапланерный полк (45-й утапп).
 Задачей этой части было сохранение опыта и освоение новых конструкций с целью дальнейшей подготовки пилотов.
Задачей этой части было сохранение опыта и освоение новых конструкций с целью дальнейшей подготовки пилотов.Некоторые итоги
Советские транспортные планеры изначально создавались в интересах ВДВ для проведения десантных операций. Однако по прямому назначению их использовали всего один раз. В остальное время два планерных полка решали транспортные задачи в тылу или помогали партизанам.
За годы войны было построено более тысячи планеров нескольких основных типов. Потеряв существенную часть этой техники, удалось перевезти сотни тонн разнообразных грузов для снабжения действующей армии и партизанских отрядов, а также обеспечить работу десятков разведывательных групп.
После Великой Отечественной войны развитие тематики транспортных планеров продолжилось, но уже не дало заметных результатов. Появились новые образцы военно-транспортной авиации, имевшие очевидные преимущества, и планеры оказались ненужными.
Антонов А-7 Транспортно–десантный планер — aviArmor
К 1939 году у нас в стране накопился опыт создания первоклассных спортивных планеров, выявились талантливые конструкторы этих изящных парителей. Большинство мировых рекордов по спортивным планерам было завоевано нашими советскими планеристами на наших советских планерах. На основе всего этого большого опыта советские планеристы и разработали несколько образцов десантных планеров для перевозки на буксире за самолетом бойцов с вооружением. Планеры эти были спроектированы в соответствии с требованиями к военно-транспортной технике того времени. В частности, бойцы должны были сидеть в кабине, а не лежать в крыле, как это было в первом нашем десантном планере Б. Урлапова. Планер должен быть приспособлен для посадки на неподготовленный аэродром, так как доставлять бойцов требовалось не только с применением парашютов. Три десантных планера, построенных советскими планеристами, оказались наиболее удачными, и они строились серийно. Это был А-7 — семиместный планер конструкции О. К- Антонова, КЦ-20 — 20-местный планер конструкции Д. Н. Колесникова и П. В. Цыбина, 11-местный планер конструкции В. К. Грибовского — Гр-29. Всего было изготовлено этих планеров около 500.
Большинство мировых рекордов по спортивным планерам было завоевано нашими советскими планеристами на наших советских планерах. На основе всего этого большого опыта советские планеристы и разработали несколько образцов десантных планеров для перевозки на буксире за самолетом бойцов с вооружением. Планеры эти были спроектированы в соответствии с требованиями к военно-транспортной технике того времени. В частности, бойцы должны были сидеть в кабине, а не лежать в крыле, как это было в первом нашем десантном планере Б. Урлапова. Планер должен быть приспособлен для посадки на неподготовленный аэродром, так как доставлять бойцов требовалось не только с применением парашютов. Три десантных планера, построенных советскими планеристами, оказались наиболее удачными, и они строились серийно. Это был А-7 — семиместный планер конструкции О. К- Антонова, КЦ-20 — 20-местный планер конструкции Д. Н. Колесникова и П. В. Цыбина, 11-местный планер конструкции В. К. Грибовского — Гр-29. Всего было изготовлено этих планеров около 500.
Десантные планеры использовались на фронтах Великой Отечественной войны в ряде операций по снабжению партизан боеприпасами, провиантом и людьми. Такие операции, в частности, проводились в 1943 году на Калининском фронте. С 6 по 20 марта 1943 года планерно-десантное подразделение 3-й воздушной армии, размещавшееся на прифронтовом аэродроме в районе Старая Тропа, вблизи Великих Лук, провело операцию по снабжению партизан. В операции принимало участие 35 планеров А-7 и 30 планеров Гр-29. За 12 суток по ночам было переброшено к партизанам 50 т боеприпасов, 150 бойцов-подрывников и 106 человек руководящего состава, а также специальное оборудование для партизанской и подпольной политработы, в том числе 5 типографий и 16 радиостанций. Все это было переброшено за 96 боевых вылетов. Буксировщиками при этом работали двухмоторные бомбардировщики ДБ-3Ф и СБ.
Наибольшее распространение в воздушнодесантных войсках в ту пору получил планер конструкции О. К. Антонова. Проект этого планера под названием «Рот Фронт-8» был отмечен первой премией на Всесоюзном конкурсе проектов многоместных десантных планеров, проводившемся Осоавиахимом в 1939 году. Затем было решено изготовить опытный экземпляр этого планера. Работа выполнялась коллективом конструкторов в городе Каунасе (Литовская ССР) и была прервана в связи с началом второй мировой войны. Закончено проектирование и изготовление планера было в Москве летом 1941 года, где и проходили его летные испытания. После успешного окончания испытаний планер, называвшийся теперь А-7, начиная с зимы 1942 года изготавливался серийно и стал поступать на вооружение воздушнодесантных войск. Что же собой представлял по конструкции этот «небесный вагон», как его иногда называли бойцы-десантники?
Затем было решено изготовить опытный экземпляр этого планера. Работа выполнялась коллективом конструкторов в городе Каунасе (Литовская ССР) и была прервана в связи с началом второй мировой войны. Закончено проектирование и изготовление планера было в Москве летом 1941 года, где и проходили его летные испытания. После успешного окончания испытаний планер, называвшийся теперь А-7, начиная с зимы 1942 года изготавливался серийно и стал поступать на вооружение воздушнодесантных войск. Что же собой представлял по конструкции этот «небесный вагон», как его иногда называли бойцы-десантники?
Это свободнонесущий моноплан с, верхним расположением крыла, в основном деревянной конструкции. Шасси — убирающееся в полете. Крыло — двухлонжеронной конструкции, состоит из трех частей: центроплана, представляющего одно целое с фюзеляжем, и двух отъемных консолей. Профиль крыла- PHI — 18%. Угол установки крыла относительно строительной горизонтали фюзеляжа — 2°. Угол поперечного V крыла — 3°.
На приборной доске летчика имеются следующие приборы: указатель скорости, указатель поворота, вариометр, компас КИ-10, высотомер двухстрелочный на 12 км.
Шасси — ферменного типа, убирающееся в полете механически из кабины. Амортизация — из резиновых пластин, работающих на сжатие. Уборка колес в фюзеляж производится путем перемещения вверх общей точки крепления внутренних подкосов. Колеса — баллонного типа 400X150. Костыль имеет рессорную амортизацию. Планер А-7 был окрашен, как и все наши боевые самолеты, сверху в темно-зеленый, защитный цвет, снизу — в голубой, на крыле и на киле размещались красные звезды. Буксировался планер А-7 за самолетами ДБ-3Ф и СБ, а также за ДБ-3.
Костыль имеет рессорную амортизацию. Планер А-7 был окрашен, как и все наши боевые самолеты, сверху в темно-зеленый, защитный цвет, снизу — в голубой, на крыле и на киле размещались красные звезды. Буксировался планер А-7 за самолетами ДБ-3Ф и СБ, а также за ДБ-3.
Уроки полета на планере — Авиационная безопасность
Год назад, главным образом ради развлечения, я решил получить дополнительный рейтинг по управлению планером. Для любого пилота частного или коммерческого самолета дополнительный планер обычно может быть изготовлен за три или четыре дня, если погода позволяет. Вам даже не нужна действующая медицинская справка или водительские права. Это также один из самых дешевых дополнительных рейтингов, которые может получить пилот самолета.
288
Летать на планерах весело, но после почти 50 лет полетов на одно- и многомоторных самолетах обучение полетам на планерах также помогло мне взглянуть на технику пилотирования самолета свежим взглядом. Вот некоторые вещи, которые я узнал.
Вот некоторые вещи, которые я узнал.
Управление энергопотреблением
Статистика авиационных происшествий показывает, что при посадке с неработающим двигателем малые самолеты имеют высокую выживаемость, если пилот следует своей подготовке и останавливает самолет. В противном случае статистика отказов двигателей не так хороша. Конечно, каждая посадка на планере имеет много общего с аварийной посадкой с неработающим двигателем.
Как доказали капитан Салленбергер и первый офицер Скайлз, посадив аэробус в реку Гудзон, любой самолет может летать и приземляться так же, как планер.Эксплуатационные детали, такие как правильные скорости для разных фаз планирующего полета, будут различаться для конкретных самолетов, но основные принципы и концепции одни и те же: пилот использует потенциальную энергию высоты самолета для управления скоростью самолета и скоростью снижения. Идея состоит в том, чтобы исчерпать энергию и высоту в конце посадочного пробега с выключенным двигателем.
Поскольку пилоты-планеристы не могут позволить себе роскошь в виде двигателя, который помогал бы регулировать высоту и положение или прерывать попытку приземления, группы и отдельные пилоты-планеристы усовершенствовали методы, используемые пилотами самолетов на различных этапах полета. .
Эти методы позволяют пилотам-планеристам набирать высоту в восходящих воздушных потоках и сохранять потенциальную энергию высоты. В свою очередь, они максимизируют время, в течение которого планер может оставаться в воздухе, и расстояние, проходимое с определенной высоты над поверхностью. Некоторые из этих методов могут быть очень полезны для пилотов самолетов.
Например, для одномоторных самолетов POH/AFM будет указана максимальная скорость планирования V BG . Справочные материалы по планерам могут включать один или несколько графиков полярных кривых.Каждый график представляет собой график наблюдаемой скорости снижения планера при различных скоростях полета и при определенных нагрузках. Эти графики используются для расчета наилучшей скорости планирования и минимальной скорости снижения.
Эти графики используются для расчета наилучшей скорости планирования и минимальной скорости снижения.
Определение наилучшего планирования
Полярный планер представляет собой график, отображающий скорость полета и соответствующую скорость снижения в неподвижном воздухе. В примере, представленном на рисунке 1 на противоположной странице, планер тонет со скоростью 3 узла при воздушной скорости 80 узлов. Минимальная скорость снижения — это значение на вертикальной оси графика, соответствующее самой высокой точке на полярной кривой.В данном примере это примерно 1,5 узла.
При наилучшей скорости планирования планирующий самолет должен преодолевать наибольшее расстояние по поверхности в неподвижном воздухе. Полярные графики помогают определить точное влияние компонентов встречного или попутного ветра, а также веса самолета на наилучшую скорость планирования. Встречный ветер или увеличенный вес самолета увеличивают наилучшую скорость планирования. Попутный ветер и более легкий вес уменьшают его. Некоторые планеры имеют возможность нести водяной балласт для увеличения наилучшей скорости планирования.
Попутный ветер и более легкий вес уменьшают его. Некоторые планеры имеют возможность нести водяной балласт для увеличения наилучшей скорости планирования.
Используя реальность этих графиков, становится очевидным, что максимальная скорость планирования, указанная в POH/AFM самолета, намного сложнее, чем одна скорость полета.Эмпирическое правило, используемое пилотами планеров, состоит в том, чтобы увеличить наилучшую скорость планирования на половину составляющей встречного ветра в узлах и уменьшить наилучшую скорость планирования на одну десятую составляющей попутного ветра в узлах.
Пример скоростей, перечисленных для L23 Super Blanik, популярного учебно-планерного самолета, приведен в таблице ниже:
Почему бы не добавить аналогичную таблицу в контрольный список вашего самолета с лучшими скоростями планирования для увеличения веса на 300 фунтов? Чтобы вычислить V BG и V A (маневровую скорость) для разных весов, используйте скорости POH/AFM для максимального веса брутто и формулу, показанную на боковой панели на стр. 18.
18.
Повернуть назад?
Один из первых уроков, которые усваивает планерист-студент, — это контрольный список перед взлетом. Одним из пунктов этого контрольного списка является точное определение того, что будет сделано, если буксировочный трос оборвется в любой момент после того, как планер взлетит. Например: «Если буксировочный трос оборвется, а полоса останется достаточной, я приземлю планер. Если остается недостаточно взлетно-посадочной полосы и я ниже 200 футов над уровнем моря, я посажу планер прямо по курсу в наиболее подходящем месте, которое смогу найти.Если обрыв буксирного троса произойдет после прохождения 200 футов над уровнем моря, я изменю курс и приземлюсь».
Во время запуска пилот кричит «200 футов» на высоте 200 футов над уровнем моря. Техника отрыва от буксировки на высоте чуть более 200 футов над уровнем моря заключается в немедленном снижении тангажа для достижения наилучшей скорости планирования, а затем выполнении относительно крутого виража обратно в сторону аэропорта. Это своего рода шок для пилотов самолетов, которых учили всегда приземляться прямо по курсу, если мощность теряется до достижения заданной высоты. В планере у вас все еще будет высота, чтобы рассеяться, когда вы вернетесь к исходному концу взлетно-посадочной полосы для посадки по ветру.
Это своего рода шок для пилотов самолетов, которых учили всегда приземляться прямо по курсу, если мощность теряется до достижения заданной высоты. В планере у вас все еще будет высота, чтобы рассеяться, когда вы вернетесь к исходному концу взлетно-посадочной полосы для посадки по ветру.
Несколько вещей можно почерпнуть из этого маневра планера. Я обнаружил, что некоторые пилоты считают, что при планировании на крутом берегу теряется больше высоты, чем на мелком. Средний самолет авиации общего назначения, летящий на холостом ходу и с максимальной скоростью планирования, может потерять более 2000 футов высоты при скоординированном развороте на 360 градусов при использовании угла крена 10 градусов.
Тот же самый самолет будет терять значительно меньшую высоту — около 600 футов — при развороте на 360 градусов при использовании 40-градусного крена.Угол крена 45 градусов приводит к наименьшей потере высоты при изменении направления при отключении питания. Очевидно, вам нужно знать эти цифры перед чрезвычайной ситуацией. Чтобы определить правильные значения для вашего самолета, поднимитесь на безопасную высоту и выполните несколько тестов, чтобы определить и записать, сколько высоты теряется при использовании 10-, 20-, 30- и 40-градусных кренов для разворотов на 360 градусов на холостом ходу. питание и удерживание V BG . Если вы летите на сложном самолете, определите результаты испытаний с высокими и низкими настройками оборотов, а также с включенной и пониженной передачей.
Очевидно, вам нужно знать эти цифры перед чрезвычайной ситуацией. Чтобы определить правильные значения для вашего самолета, поднимитесь на безопасную высоту и выполните несколько тестов, чтобы определить и записать, сколько высоты теряется при использовании 10-, 20-, 30- и 40-градусных кренов для разворотов на 360 градусов на холостом ходу. питание и удерживание V BG . Если вы летите на сложном самолете, определите результаты испытаний с высокими и низкими настройками оборотов, а также с включенной и пониженной передачей.
При отработке крутонаклонных виражей с выключенным двигателем скорость самолета будет увеличиваться. Используйте наклон носа вверх, чтобы сохранить V BG . Чтобы вернуться к взлетно-посадочной полосе, потребуется развернуться более чем на 180 градусов, а затем небольшой разворот в противоположном направлении, чтобы выровнять самолет по взлетно-посадочной полосе. Общее количество разворотов, вероятно, составляет около 240 градусов. Координированный полет имеет решающее значение во время разворота. Использование чрезмерного руля направления в ошибочной попытке увеличить скорость поворота очень опасно.
Координированный полет имеет решающее значение во время разворота. Использование чрезмерного руля направления в ошибочной попытке увеличить скорость поворота очень опасно.
Как известно давним читателям, тема разворота на взлетно-посадочную полосу при отказе двигателя вскоре после взлета широко исследовалась.Наиболее исчерпывающим обсуждением на этих страницах была трактовка Рича Стоуэлла «Пересмотренные пути возврата» в нашем выпуске за январь 2006 года. Эта статья была основана на исследовании на симуляторе. Вывод тогда и сейчас? Вам лучше приземляться прямо по курсу после отказа двигателя вскоре после взлета в одиночном режиме.
Конечно, единственный способ узнать, какая высота над землей является минимально необходимой для безопасного возвращения пилота на взлетно-посадочную полосу после потери мощности, — это отработать маневр на безопасной высоте.Освоение этого знания и отработка маневра будет стоить реальных денег, если вы когда-либо сталкивались с проблемой потери мощности до достижения высоты паттерна. Вы будете знать гораздо больше о том, что требуется для безопасного возвращения на взлетно-посадочную полосу и, что более важно, когда вы не можете этого сделать. Прежде чем приступать к такой практике, конечно, проверьте цифры углов крена и потери высоты при разворотах на 180 градусов перед взлетом.
Вы будете знать гораздо больше о том, что требуется для безопасного возвращения на взлетно-посадочную полосу и, что более важно, когда вы не можете этого сделать. Прежде чем приступать к такой практике, конечно, проверьте цифры углов крена и потери высоты при разворотах на 180 градусов перед взлетом.
Другим пунктом, отмеченным пилотами планеристов во время проверки перед взлетом, является направление любого бокового ветра.Самолеты-буксировщики обычно поворачивали на 10–20 градусов по ветру сразу после взлета. Если разрыв буксира происходит после 200 футов над уровнем земли, пилот планера разворачивается против ветра при выполнении разворота обратно на поле. Поворот против ветра приводит к наименьшей путевой скорости и наименьшему количеству градусов поворота, которые необходимо выровнять с взлетно-посадочной полосой.
Лучшие парапланы имеют коэффициент планирования около 60:1. В неподвижном воздухе на высоте 1000 футов они могли бы пролететь 10 миль перед посадкой. Учебно-планерные самолеты обычно имеют коэффициент планирования около 30: 1. Большинство легких самолетов имеют аэродинамическое качество около 10:1. Самолету АОН потребуется как минимум в три раза больше высоты, чтобы выполнить тот же маневр, что и учебному планеру. Чтобы определить наилучшие углы крена для сохранения или уменьшения высоты вашего самолета после потери мощности, вы должны определить их до того, как возникнет чрезвычайная ситуация, которая может потребовать их использования.
Учебно-планерные самолеты обычно имеют коэффициент планирования около 30: 1. Большинство легких самолетов имеют аэродинамическое качество около 10:1. Самолету АОН потребуется как минимум в три раза больше высоты, чтобы выполнить тот же маневр, что и учебному планеру. Чтобы определить наилучшие углы крена для сохранения или уменьшения высоты вашего самолета после потери мощности, вы должны определить их до того, как возникнет чрезвычайная ситуация, которая может потребовать их использования.
Наиболее серьезные проблемы с безопасностью, связанные с потерей мощности (когда самолет мгновенно превращается в планер), возникают в период между началом вращения самолета и набором заданной высоты.Многие контрольные списки POH для самолетов включают пункт для инструктажа перед взлетом. Если все сделано правильно, пилоты озвучивают себе, экипажу и пассажирам точный план на случай отключения электроэнергии на каждом этапе взлетной последовательности. Он должен включать в себя несколько точек принятия решений и наилучшее место для аварийной посадки, если остается недостаточная взлетно-посадочная полоса, а также высоту, с которой можно считать безопасным разворот обратно в аэропорт.
При правильном проведении предварительный инструктаж всех пассажиров воздушного судна дает наилучшие шансы на то, что все уйдут невредимыми от одной из самых серьезных проблем, с которыми может столкнуться пилот.
Управление шаблоном
Студентов-планеристов учат распознавать различные углы во время захода на посадку и посадки. В зависимости от того, является ли угол слишком крутым или слишком пологим для конкретного этапа захода на посадку и посадки, у пилота планера есть три инструмента для корректировки.
Во-первых, пилот планера может отрегулировать угол, приближаясь или удаляясь от взлетно-посадочной полосы на подветренном или базовом этапе захода на посадку. Во-вторых, пилот также может удлинять или укорачивать базовый или попутный участок.Наконец, пилот планера может использовать или не использовать клевантные тормоза или спойлеры, чтобы достичь правильных углов. Расстояние по ветру от взлетно-посадочной полосы и высота схемы не являются критическими факторами. Распознавание соответствующих углов имеет решающее значение.
Расстояние по ветру от взлетно-посадочной полосы и высота схемы не являются критическими факторами. Распознавание соответствующих углов имеет решающее значение.
PTS пилота коммерческого планера требует, чтобы заявитель «плавно приземлился в обозначенной зоне приземления, без заметного смещения и с продольной осью, выровненной с желаемой траекторией приземления, с остановкой незадолго до назначенной точки и в пределах 100 футов от нее.Удивительно, но добиться этого несложно: если угловая высота над ВПП меньше 30 градусов, двигаться ближе к ВПП по подветренной стороне; если угловая высота над взлетно-посадочной полосой превышает 45 градусов, отойдите.
Глиссадная дорожка 5:1 приблизительно соответствует той, которая доступна при полностью открытых клевантных клевантах/спойлерах, в то время как соотношение 20:1 приблизительно соответствует глиссаде с закрытыми тормозами и небольшим встречным ветром. Эти углы и глиссады графически изображены на боковой панели на стр. 19.
19.
Пилоты часто сильно различаются в своих оценках горизонтального расстояния, что в загруженном аэропорту приводит к путанице и разочарованию.Заменив закрылки самолета тормозами пикирования или спойлерами планера, пилоты самолетов имеют те же три инструмента, которые пилоты планеров используют для корректировки углов захода на посадку и посадки. Пилоты самолетов достигли бы более последовательных и лучших результатов, если бы они больше сосредоточивались на вертикальных углах к взлетно-посадочной полосе и точке приземления и меньше на горизонтальных расстояниях.
Извлеченные уроки
Полет на планере не сильно отличается от управления самолетом с двигателем — органы управления полетом работают одинаково, в то время как навигация, связь и регулирование принципиально не изменились.Что изменилось, конечно, так это отсутствие доступного и регулируемого источника энергии, позволяющего пилоту двигателя исправлять ошибки или ошибки в суждениях. Чтобы компенсировать это, пилоты планеров планируют заранее, используют более совершенные схемы и летают так, как будто каждая посадка является вынужденной. Это не плохие привычки для пилотов самолетов.
Чтобы компенсировать это, пилоты планеров планируют заранее, используют более совершенные схемы и летают так, как будто каждая посадка является вынужденной. Это не плохие привычки для пилотов самолетов.
Стивен Гибб — гражданский и военный офицер из Мэриленда, прошедший подготовку в CFI/I/ME/Glider и налетавший более 3000 часов.
Космический корабль, летящий как планер
А планер это особый вид самолет что без двигателя.В полете планер имеет три силы действуя на это по сравнению с четыре силы которые действуют на двигатель самолета. Оба типа самолетов подвергаются воздействию сил поднимать, перетащите, и масса. Самолет с двигателем имеет двигатель, который генерирует тяга, в то время как планер имеет нет тяги.
Существует множество различных типов планеров.
Бумажные самолетики
являются самыми простыми самолетами для сборки и полета, и студенты могут изучить
основы
движение самолета
летая на бумажных самолетиках. Игрушечные планеры, сделанные из пробкового дерева или пенопласта, являются недорогим
способ для учащихся изучить основы
аэродинамика, при этом
весело строить и летать на самолете. Дельтапланы — это пилотируемые летательные аппараты,
запускать, прыгая со склона холма или буксируя его наверху. Пилотируемые планеры есть
запускаются с помощью наземных катапульт или буксируются на
Затем самолет с двигателем вырвался на свободу, чтобы часами планировать на многие мили.Братья Райт усовершенствовали конструкцию первого самолета и
получил опыт пилотирования через серию
полеты на планере
с 1900 по 1903 год.
Игрушечные планеры, сделанные из пробкового дерева или пенопласта, являются недорогим
способ для учащихся изучить основы
аэродинамика, при этом
весело строить и летать на самолете. Дельтапланы — это пилотируемые летательные аппараты,
запускать, прыгая со склона холма или буксируя его наверху. Пилотируемые планеры есть
запускаются с помощью наземных катапульт или буксируются на
Затем самолет с двигателем вырвался на свободу, чтобы часами планировать на многие мили.Братья Райт усовершенствовали конструкцию первого самолета и
получил опыт пилотирования через серию
полеты на планере
с 1900 по 1903 год.
Космический корабль летит как планер при входе в атмосферу и приземлении. В течение
восхождение,
тяга обеспечивается тремя главными двигателями космического корабля (SSME) на базе.
орбитального аппарата и двух твердотопливных ракетных ускорителей (SRB), которые присоединены к
оранжевый Внешний топливный бак (ET).Твердые частицы выбрасываются примерно через две минуты после подъема.
Виды деятельности:
Экскурсии с гидом
Навигация ..
- Домашняя страница руководства для начинающих
Оперение планера, силовая установка и шасси
Хвостовое оперение включает всю хвостовую часть, состоящую из неподвижных поверхностей, таких как горизонтальный стабилизатор и вертикальное оперение, и подвижных поверхностей, таких как руль высоты или стабилизатор, руль направления и любой триммер вкладки. Эти две неподвижные поверхности действуют как перья на стреле, стабилизируя планер и помогая сохранять прямой путь в воздухе. [Рис. 2-11]
Эти две неподвижные поверхности действуют как перья на стреле, стабилизируя планер и помогая сохранять прямой путь в воздухе. [Рис. 2-11]
Руль высоты крепится к задней части горизонтального стабилизатора. Лифт управляет движением вокруг боковой оси. Это известно как поле. Во время полета руль высоты используется для перемещения носовой части вверх и вниз, что регулирует угол наклона планера. Горизонт является основным ориентиром для пилота планера.Руль высоты в основном используется для изменения или удержания одного и того же угла атаки планера. Триммер, обычно расположенный на руле высоты планера, уменьшает сопротивление, ощущаемое органами управления полетом из-за воздушного потока над соответствующей поверхностью управления.
Рекомендации по летной грамотности Справочник Рода Мачадо «Как летать на самолете» — Изучите основные принципы управления любым самолетом. Сделайте летную подготовку проще, дешевле и приятнее. Освойте все маневры чекрайда.Изучите философию полета «палка и руль направления». Не допускайте случайного сваливания или вращения самолета. Посадите самолет быстро и с удовольствием.
Освойте все маневры чекрайда.Изучите философию полета «палка и руль направления». Не допускайте случайного сваливания или вращения самолета. Посадите самолет быстро и с удовольствием. Руль направления крепится к задней части вертикального стабилизатора. Руль направления управляет движением вокруг вертикальной оси. Это известно как рыскание. Руль направления используется в сочетании с элеронами и рулем высоты для координации поворотов во время полета.
В некоторых планерах используется стабилизатор, который используется вместо руля высоты и горизонтального стабилизатора.Стабилизатор поворачивается вверх и вниз на центральной шарнирной точке. При оттягивании ручки управления нос планера поднимается вверх; при движении вперед нос движется вниз. В стабилизаторах иногда используется триммер антисервопривода для достижения триммера по тангажу. Вкладка антисервопривода обеспечивает ощущение контроля, сравнимое с управлением лифтом.
Триммеры снижают нагрузку на пилота, уменьшая давление на органы управления, необходимое для поддержания заданной воздушной скорости. Одним из типов триммеров, используемых на планерах, является триммер руля высоты, небольшой откидной, регулируемый из кабины язычок на задней кромке руля высоты.[Рисунок 2-12] Другие типы устройств обвязки руля высоты включают в себя пружинные системы банджи и системы обвязки с храповым механизмом. В этих системах давление передней и задней рукоятки управления создается регулируемой пружиной или банджи-шнуром.
Первичные органы управления полетом (элероны, руль высоты и руль направления) с помощью триммеров снижают нагрузку на органы управления и обеспечивают пилоту положительную информацию. Триммер бывает сервоприводным или антисервоприводным. [Рисунок 2-13] Движение язычка антисервопривода противоположно поверхности управления, обеспечивая положительную обратную связь (или ощущение) для пилота.Язычки сервоприводов перемещаются в том же направлении, что и поверхность управления, и позволяют пилоту снимать (или облегчать) управляющую нагрузку, снижая утомляемость во время полета и обеспечивая аэродинамическую дифферентовку.
На протяжении многих лет форма хвостового оперения принимала разные формы. Ранние планеры чаще всего строились с горизонтальным стабилизатором, установленным внизу вертикального стабилизатора. Такой тип хвостового оперения называется обычным оперением. Другие планеры были спроектированы с Т-образным хвостовым оперением, а третьи — с V-образным хвостовым оперением.Планеры с Т-образным хвостовым оперением имеют горизонтальный стабилизатор, установленный наверху вертикального стабилизатора, образуя Т-образное оперение. У V-образного хвостового оперения две поверхности оперения установлены в форме буквы V. V-образное оперение сочетает в себе движения руля высоты и руля направления. Эта комбинация руля высоты и руля направления называется руль направления.
Устройства буксировочного крюка
Утвержденный буксирный крюк является жизненно важной частью оборудования планера. Буксирный крюк предназначен для быстрого освобождения, когда пилот прикладывает усилие к рукоятке освобождения. В качестве меры безопасности (на большинстве забрюшинных крюков (крюк CG)), если возникает обратное давление либо из-за выхода из положения во время буксировки, либо из-за выхода за буксировочный трос, расцепитель автоматически открывается.Часть предполетной подготовки пилота планера состоит в том, чтобы убедиться, что буксировочный крюк правильно расстегивается при приложенном прямом и обратном давлении.
В качестве меры безопасности (на большинстве забрюшинных крюков (крюк CG)), если возникает обратное давление либо из-за выхода из положения во время буксировки, либо из-за выхода за буксировочный трос, расцепитель автоматически открывается.Часть предполетной подготовки пилота планера состоит в том, чтобы убедиться, что буксировочный крюк правильно расстегивается при приложенном прямом и обратном давлении.
Планер может иметь буксирный крюк, расположенный на носу или под носом и/или под центром тяжести (ЦТ), рядом с основными стойками шасси. Передний буксировочный крюк используется для аэробуксировки. Крюк CG используется для запуска с земли. Планер только с гаком центра тяжести может быть одобрен для буксировки в соответствии с Руководством по летной эксплуатации/Руководством пилота. [Рис. 2-14]
Рис. 2-14.Места Тохука.Силовая установка
Самозапускающиеся планеры
Самозапускающиеся планеры оснащены двигателями, достаточно мощными, чтобы их можно было запускать без посторонней помощи. Двигатели также могут использоваться для поддержания полета в случае ухудшения условий парения. Самозапускающиеся планеры сильно различаются по расположению двигателя и типу гребного винта. Есть два типа самозапускающихся планеров: прогулочные моторные планеры и высокопроизводительные самозапускающиеся планеры.
Двигатели также могут использоваться для поддержания полета в случае ухудшения условий парения. Самозапускающиеся планеры сильно различаются по расположению двигателя и типу гребного винта. Есть два типа самозапускающихся планеров: прогулочные моторные планеры и высокопроизводительные самозапускающиеся планеры.
оснащены фиксированным носовым двигателем и винтом с полным флюгированием. [Рис. 2-15] Туристические мотопланеры неопытному глазу напоминают самолет. У них есть некоторые основные характеристики самолета, но они не сертифицированы как самолет. На других типах самозапускающихся планеров двигатель и воздушный винт расположены в кормовой части кабины. Высокопроизводительные самозапускающиеся планеры обычно имеют двигатели и пропеллеры, установленные за кабиной, которые полностью убираются в фюзеляж для минимального сопротивления в режиме парения.[Рис. 2-16] Пропеллеры могут складываться или просто выравниваться с двигателем и полностью втягиваться. Эта конфигурация сохраняет гладкую конфигурацию носовой части с низким сопротивлением, важную для хорошей эффективности парения. Когда двигатель и пропеллер не используются, они убираются в фюзеляж, уменьшая сопротивление и повышая летные характеристики. Эти типы самозапускающихся двигателей обычно соединены со складным винтом, поэтому вся силовая установка может быть убрана, а дверцы отсека закрыты и опломбированы.
Эта конфигурация сохраняет гладкую конфигурацию носовой части с низким сопротивлением, важную для хорошей эффективности парения. Когда двигатель и пропеллер не используются, они убираются в фюзеляж, уменьшая сопротивление и повышая летные характеристики. Эти типы самозапускающихся двигателей обычно соединены со складным винтом, поэтому вся силовая установка может быть убрана, а дверцы отсека закрыты и опломбированы.
Маршевые двигатели
Некоторые планеры оборудованы маршевыми двигателями, помогающими оставаться в воздухе достаточно долго, чтобы вернуться в аэропорт. Однако маршевые двигатели не обеспечивают достаточной мощности для запуска планера с земли без посторонней помощи. Эти планеры запускаются либо с помощью аэробуксировщика, либо с земли. [Рисунок 2-17] Более подробное объяснение работы двигателя можно найти в Главе 7, Процедуры запуска и восстановления и пилотажные маневры.
Рис. 2-17. Моторный планер Schleicher ASH 26e с выдвинутой мачтой маршевого двигателя.
2-17. Моторный планер Schleicher ASH 26e с выдвинутой мачтой маршевого двигателя.Шасси
Шасси планера обычно включает в себя основное колесо, переднюю опору или колесо и хвостовое колесо или опору, а также часто законцовки крыла или опорные плиты. Планеры, рассчитанные на высокую скорость и низкое лобовое сопротивление, часто имеют полностью убирающееся основное шасси и небольшое отрывное хвостовое колесо или хвостовую опору. Отрывные хвостовые полозья используются на высокопроизводительных планерах и сконструированы таким образом, чтобы ломаться при воздействии боковой нагрузки.[Рис. 2-18]
Рис. 2-18. Колеса шасси на планере. В целях безопасности основные стойки шасси во время запуска остаются выпущенными. Если есть перерыв на буксировку или досрочное освобождение, пилот должен сосредоточиться на безопасном возвращении. Обычный контрольный список пилота при посадке предусматривает проверку шасси, но во время чрезвычайной ситуации на малой высоте важные пункты могут быть пропущены в любом контрольном списке. Поэтому рекомендуется оставлять основную передачу выдвинутой до достижения безопасной высоты.
Поэтому рекомендуется оставлять основную передачу выдвинутой до достижения безопасной высоты.
Колесные тормоза
Колесный тормоз, установленный на колесе основного шасси, помогает планеру снизить скорость или остановиться после приземления.Тип используемого колесного тормоза часто зависит от конструкции планера. Многие ранние планеры полагались на трение между носовым полозком и землей, чтобы остановиться. Современные модели планеров оснащены барабанными, дисковыми и фрикционными тормозами. Наиболее распространенным типом колесного тормоза в современных планерах является дисковый тормоз, который очень похож на дисковый тормоз на передних колесах большинства автомобилей. Большинство дисковых тормозов планера имеют гидравлический привод для обеспечения максимальной тормозной способности. Управление колесным тормозом варьируется от одного типа планера к другому.
Рекомендации по летной грамотности
Хвосты стабилизируют посадку планирующих гекконов, врезающихся головой в стволы деревьев наименее изученная область, особенно в отношении поглощения энергии при ударе в планерах с ограниченными возможностями аэродинамического управления (например, без возможности выдерживать большие углы атаки при наведении на цель).
 У механических летательных аппаратов, таких как птицы, летучие мыши и многие насекомые, посадочная сила может быть значительно ниже, чем сила взлета 23,24,25 . Уменьшение кинетической энергии перед приземлением или посадкой достигается преимущественно за счет взмахов крыльев. В отличие от летательных аппаратов, специализированные планеры без машущих крыльев, к которым относятся белки-летяги, колуго, ящерицы, змеи и лягушки, направляются к приземляющимся целям на относительно высоких скоростях и могут испытывать большие пиковые усилия при приземлении, используя свои конечности, тело или расширенные поверхности кожи . 22,25,26,27 .Летающие ящерицы из рода Драко удлиняют свои ребра, чтобы достичь высокой скорости планирования, и могут ориентировать свое тело почти параллельно поверхности непосредственно перед приземлением всеми ногами одновременно, чтобы замедлить и облегчить прикрепление 11,26,28 . Летающий геккон, Ptychozoan kuhli , пассивно разворачивает два больших кожных лоскута латерально между передними и задними ногами вместе с межпальцевой перепонкой, активно развернутой при расправлении пальцев 29 .
У механических летательных аппаратов, таких как птицы, летучие мыши и многие насекомые, посадочная сила может быть значительно ниже, чем сила взлета 23,24,25 . Уменьшение кинетической энергии перед приземлением или посадкой достигается преимущественно за счет взмахов крыльев. В отличие от летательных аппаратов, специализированные планеры без машущих крыльев, к которым относятся белки-летяги, колуго, ящерицы, змеи и лягушки, направляются к приземляющимся целям на относительно высоких скоростях и могут испытывать большие пиковые усилия при приземлении, используя свои конечности, тело или расширенные поверхности кожи . 22,25,26,27 .Летающие ящерицы из рода Драко удлиняют свои ребра, чтобы достичь высокой скорости планирования, и могут ориентировать свое тело почти параллельно поверхности непосредственно перед приземлением всеми ногами одновременно, чтобы замедлить и облегчить прикрепление 11,26,28 . Летающий геккон, Ptychozoan kuhli , пассивно разворачивает два больших кожных лоскута латерально между передними и задними ногами вместе с межпальцевой перепонкой, активно развернутой при расправлении пальцев 29 . Экспериментальное ограничение больших боковых закрылков или ступней показало, что и то, и другое улучшает качество планирования 29,30 .Несмотря на способность к дорсовентральному уплощению и удлинению ребер, ящерицы с пилообразным хвостом ( Holaspis guentheri ) вместо этого используют преимущества низкой нагрузки на крылья за счет уменьшения плотности скелета для создания своих траекторий спуска 31 .
Экспериментальное ограничение больших боковых закрылков или ступней показало, что и то, и другое улучшает качество планирования 29,30 .Несмотря на способность к дорсовентральному уплощению и удлинению ребер, ящерицы с пилообразным хвостом ( Holaspis guentheri ) вместо этого используют преимущества низкой нагрузки на крылья за счет уменьшения плотности скелета для создания своих траекторий спуска 31 . Напротив, мы оцениваем, что азиатские плоскохвостые гекконы, изученные здесь, имеют очень высокую нагрузку на крыло (~ 65 Н/м 2 ) по сравнению с большинством планеров, даже с большей массой тела (см. рис. 3 в Socha et др. 22 ). Записав траектории планирования, мы обнаружили, что угол их планирования был почти в два раза больше, а коэффициент планирования почти вдвое больше, чем у специализированных планеров, таких как ящерицы Драко .В результате азиатские плоскохвостые гекконы продемонстрировали баллистическое неустойчивое скольжение на короткие дистанции с высокоскоростными приземлениями с сильными ударами (рис. 1 и дополнительный фильм 1). Как правило, гекконы ускорялись на протяжении всего своего полета и достигали равновесия только ближе к концу своего полета, если вообще достигали (4/21 геккона все еще ускорялись при ударе, рис. 1b). Более чем в половине наших испытаний планирующие гекконы достигли своей цели, дерева на небольшой поляне (13/21 испытаний с 16 особями, рис. 1а). Приземления гекконов на дерево были заметны в 7 попытках из 13 планирующих до дерева, из которых один неповрежденный геккон и два бесхвостых геккона не выдержали приземления (рис.1а).
1 и дополнительный фильм 1). Как правило, гекконы ускорялись на протяжении всего своего полета и достигали равновесия только ближе к концу своего полета, если вообще достигали (4/21 геккона все еще ускорялись при ударе, рис. 1b). Более чем в половине наших испытаний планирующие гекконы достигли своей цели, дерева на небольшой поляне (13/21 испытаний с 16 особями, рис. 1а). Приземления гекконов на дерево были заметны в 7 попытках из 13 планирующих до дерева, из которых один неповрежденный геккон и два бесхвостых геккона не выдержали приземления (рис.1а).
Положение тела θ соответствует углу наклона назад, заключенному между туловищем геккона и стволом дерева. Внешние силы обозначены зеленым жирным шрифтом, а виртуальные силы показаны фиолетовым.
Планирование на короткие дистанции с ограниченным аэродинамическим контролем
Способности планировать относительно неспециализированных азиатских плоскохвостых гекконов приводили к баллистическим ныряниям на короткие дистанции со скоростями аварийной посадки головой вперед 6. 0 ± 0,9 м / с (рис. 1 и дополнительный фильм 1). H. platyurus демонстрировал постуральные изменения во время планирования и постепенно поднимался вверх по мере приближения к цели, но сохранял постоянный угол сближения 53 ± 5,8° (рис. 1d), подобно более специализированным планирующим гекконам ( Ptychozoon kuhli : 52° 29 , P. lionatum : 57° 30 ). Это предполагает поведенческий репертуар с ограниченной способностью выполнять направленный воздушный спуск, используя имеющиеся полномочия аэродинамического управления для изменения положения при сохранении вектора захода на посадку.Построив график зависимости скорости от продолжительности планирования (рис. 1b), мы также видим, что по мере приближения к дереву-мишени гекконы снижали скорость, что свидетельствует о попытке специального маневра приземления. Однако из-за отсутствия специализированной аэродинамической морфологии 4 из 21 геккона все еще ускорялись при ударе, а животные, которые замедлились, смогли снизить свою скорость только на 6,4 ± 4,9% от своей максимальной скорости полета и должны были поглотить почти полный импульс полета при ударе.
0 ± 0,9 м / с (рис. 1 и дополнительный фильм 1). H. platyurus демонстрировал постуральные изменения во время планирования и постепенно поднимался вверх по мере приближения к цели, но сохранял постоянный угол сближения 53 ± 5,8° (рис. 1d), подобно более специализированным планирующим гекконам ( Ptychozoon kuhli : 52° 29 , P. lionatum : 57° 30 ). Это предполагает поведенческий репертуар с ограниченной способностью выполнять направленный воздушный спуск, используя имеющиеся полномочия аэродинамического управления для изменения положения при сохранении вектора захода на посадку.Построив график зависимости скорости от продолжительности планирования (рис. 1b), мы также видим, что по мере приближения к дереву-мишени гекконы снижали скорость, что свидетельствует о попытке специального маневра приземления. Однако из-за отсутствия специализированной аэродинамической морфологии 4 из 21 геккона все еще ускорялись при ударе, а животные, которые замедлились, смогли снизить свою скорость только на 6,4 ± 4,9% от своей максимальной скорости полета и должны были поглотить почти полный импульс полета при ударе.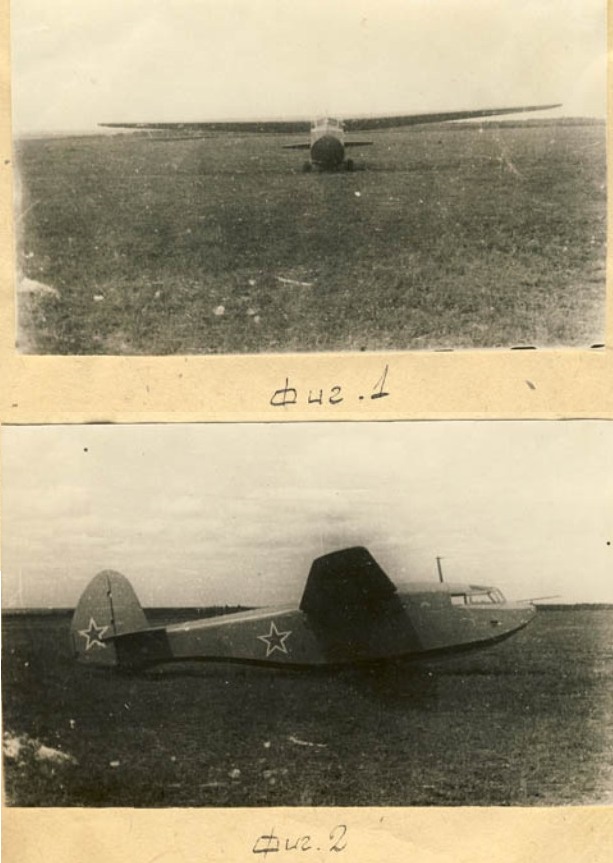 влияние. Планеры млекопитающих могут снижать скорость до 60% перед приземлением 27 .Приземление на высокой скорости с минимальными средствами аэродинамического контроля может увеличить риск получения травм или падения на лесную подстилку 32 с повышенным риском нападения хищников. Интересно, что некоторые более крупные виды гекконов даже имеют морфологическую специализацию черепа для снижения риска травм головы 33 . Джаярам и др. 34 сравнили удельную энергию лобовых столкновений животных с максимальной энергией, поглощаемой кожей и костью. Они обнаружили, что рассеяние энергии дает существенное преимущество при изученном здесь малом размере, допуская механически опосредованные переходы без повреждений.
влияние. Планеры млекопитающих могут снижать скорость до 60% перед приземлением 27 .Приземление на высокой скорости с минимальными средствами аэродинамического контроля может увеличить риск получения травм или падения на лесную подстилку 32 с повышенным риском нападения хищников. Интересно, что некоторые более крупные виды гекконов даже имеют морфологическую специализацию черепа для снижения риска травм головы 33 . Джаярам и др. 34 сравнили удельную энергию лобовых столкновений животных с максимальной энергией, поглощаемой кожей и костью. Они обнаружили, что рассеяние энергии дает существенное преимущество при изученном здесь малом размере, допуская механически опосредованные переходы без повреждений.
Этапы стабилизации при приземлении для предотвращения падения
Оригинальные кадры из полевых работ в низинных тропических лесах показали, что планирующие азиатские плоскохвостые гекконы используют хвост вместе с задними ногами, чтобы безопасно приземлиться на ствол дерева (см. Рис. 2а–е). Короче говоря, удар головой вперед сообщает животному большой угловой момент тангажа. Используя свои хвосты для создания длинного плеча момента, гекконы могут постепенно рассеивать этот импульс, отклоняясь назад, и в конечном итоге успешно приземляются с меньшим усилием.Мы назвали этот замечательный маневр «реакцией на остановку падения» (FAR). В дополнение к 21 скольжению, зарегистрированному на большом расстоянии, мы зафиксировали 16 попыток приземления гекконов на дерево с помощью камеры ближнего действия (рис. 1c, d), при этом 5 из них смогли удерживать все четыре ноги во время приземления. Одна хвостатая особь упала с дерева (в 1 из 16 испытаний), откинулась назад, но потеряла сцепление с задними лапами и упала на лесную подстилку. В 2 из 16 испытаний геккон успешно приземлился, но маневр приземления не поддавался количественной оценке.Когда хвостатые животные теряли сцепление с передними лапами при столкновении с деревом, они демонстрировали FAR, похожий на подножку, с наклоном назад и каждый раз успешно приземлялись (в 8 из 16 испытаний).
Рис. 2а–е). Короче говоря, удар головой вперед сообщает животному большой угловой момент тангажа. Используя свои хвосты для создания длинного плеча момента, гекконы могут постепенно рассеивать этот импульс, отклоняясь назад, и в конечном итоге успешно приземляются с меньшим усилием.Мы назвали этот замечательный маневр «реакцией на остановку падения» (FAR). В дополнение к 21 скольжению, зарегистрированному на большом расстоянии, мы зафиксировали 16 попыток приземления гекконов на дерево с помощью камеры ближнего действия (рис. 1c, d), при этом 5 из них смогли удерживать все четыре ноги во время приземления. Одна хвостатая особь упала с дерева (в 1 из 16 испытаний), откинулась назад, но потеряла сцепление с задними лапами и упала на лесную подстилку. В 2 из 16 испытаний геккон успешно приземлился, но маневр приземления не поддавался количественной оценке.Когда хвостатые животные теряли сцепление с передними лапами при столкновении с деревом, они демонстрировали FAR, похожий на подножку, с наклоном назад и каждый раз успешно приземлялись (в 8 из 16 испытаний). Напротив, мы наблюдали, как бесхвостые гекконы пытались приземлиться, достигнув дерева, теряли контакт и падали (2 попытки). Потеря бесхвостым животным контакта передних лап (дополнительный фильм 1) предполагает, что хвост может поддерживать стабилизацию наклона тела назад (рис. 2d, e). Замечательное поведение приземления было успешно выполнено после того, как хвостатые животные столкнулись со стволом дерева на высокой скорости удара более 6 м / с.Возможное объяснение использования хвостов состоит в том, что в противном случае были бы превышены предельные силы сцепления стопы, необходимые для поддержания контакта, как было предложено для некоторых подложек 35,36 .
Напротив, мы наблюдали, как бесхвостые гекконы пытались приземлиться, достигнув дерева, теряли контакт и падали (2 попытки). Потеря бесхвостым животным контакта передних лап (дополнительный фильм 1) предполагает, что хвост может поддерживать стабилизацию наклона тела назад (рис. 2d, e). Замечательное поведение приземления было успешно выполнено после того, как хвостатые животные столкнулись со стволом дерева на высокой скорости удара более 6 м / с.Возможное объяснение использования хвостов состоит в том, что в противном случае были бы превышены предельные силы сцепления стопы, необходимые для поддержания контакта, как было предложено для некоторых подложек 35,36 .
Маневр приземления животного можно охарактеризовать пятью этапами. Сначала планирующие гекконы достигали цели, наклонив тело вверх всего на 16 ± 8,4° от горизонтали (рис. 2ж). Когда животное завершило свой воздушный спуск (этап 1, рис. 2а), произошел первоначальный контакт его головы и передней части туловища, поглощающих кинетическую энергию (этап 2, рис. 2б). Столкновение увеличило угловой момент, что привело к вращению туловища вниз к стволу дерева. Затем задние ноги контактировали с вертикальной подложкой (этап 3, рис. 2в). Ставя все четыре ноги на вертикальную мишень, животное не скользило вниз по дереву к лесной подстилке, а вместо этого выгибало дистальный кончик хвоста в вентральном направлении. На четвертой стадии обе передние лапы начинают превышать пределы прикрепления и теряют контакт с деревом (стадия 4, рис. 2d). На заключительном этапе нельзя было предотвратить откидывание назад с прижатым к дереву хвостом, и туловище животного начинало вращаться назад в сторону от дерева (этап 5, рис.2д). Потеря контакта и откат назад наблюдались в 8 испытаниях с участием 7 человек. Были зарегистрированы углы тела до 175 ° (в среднем 114 ± 16 ° s.e.) (рис. 2h), когда положение приземления на выпуклый ствол дерева позволяло измерить угол тела. Наиболее эффектная наблюдаемая поза приземления показана на рис. 2e. Эта удивительно сильная реакция на откидывание назад почти в два раза больше той, которую мы наблюдали в «реакции на стойку» после поскальзывания при быстром беге по стене 4 , но подтверждает возможность сохранения хвостового рефлекса, используемого для другого поведения.
2б). Столкновение увеличило угловой момент, что привело к вращению туловища вниз к стволу дерева. Затем задние ноги контактировали с вертикальной подложкой (этап 3, рис. 2в). Ставя все четыре ноги на вертикальную мишень, животное не скользило вниз по дереву к лесной подстилке, а вместо этого выгибало дистальный кончик хвоста в вентральном направлении. На четвертой стадии обе передние лапы начинают превышать пределы прикрепления и теряют контакт с деревом (стадия 4, рис. 2d). На заключительном этапе нельзя было предотвратить откидывание назад с прижатым к дереву хвостом, и туловище животного начинало вращаться назад в сторону от дерева (этап 5, рис.2д). Потеря контакта и откат назад наблюдались в 8 испытаниях с участием 7 человек. Были зарегистрированы углы тела до 175 ° (в среднем 114 ± 16 ° s.e.) (рис. 2h), когда положение приземления на выпуклый ствол дерева позволяло измерить угол тела. Наиболее эффектная наблюдаемая поза приземления показана на рис. 2e. Эта удивительно сильная реакция на откидывание назад почти в два раза больше той, которую мы наблюдали в «реакции на стойку» после поскальзывания при быстром беге по стене 4 , но подтверждает возможность сохранения хвостового рефлекса, используемого для другого поведения. При беге по стене 4 время между соскальзыванием передней стопы и контактом с хвостовым рефлексом составило 47 мс. В FAR время, прошедшее между потерей контакта передней стопы и пиковым наклоном назад, составляло примерно 64 мс (рис. 2h), что указывает на достаточное время для срабатывания рефлекса, несмотря на увеличение скорости движения, связанной с скольжением. Вполне вероятно, что тангаж в FAR позволяет более постепенно рассеивать энергию и имеет решающее значение для успешной посадки. На рис.2ч. Гекконы демонстрировали значительное отклонение туловища от дерева со скоростью 2057 ± 762°/с до среднего угла 114 ± 16° по направлению к лесной подстилке ( n = 8). Мы измерили среднюю продолжительность 138 ± 15 мс для завершения FAR от смещения туловища геккона до восстановления контакта дерева с передними ногами (дополнительный фильм 1). На пятой стадии геккон восстанавливался, наклоняя туловище вперед к стволу дерева, восстанавливая контакт передней части стопы (рис.
При беге по стене 4 время между соскальзыванием передней стопы и контактом с хвостовым рефлексом составило 47 мс. В FAR время, прошедшее между потерей контакта передней стопы и пиковым наклоном назад, составляло примерно 64 мс (рис. 2h), что указывает на достаточное время для срабатывания рефлекса, несмотря на увеличение скорости движения, связанной с скольжением. Вполне вероятно, что тангаж в FAR позволяет более постепенно рассеивать энергию и имеет решающее значение для успешной посадки. На рис.2ч. Гекконы демонстрировали значительное отклонение туловища от дерева со скоростью 2057 ± 762°/с до среднего угла 114 ± 16° по направлению к лесной подстилке ( n = 8). Мы измерили среднюю продолжительность 138 ± 15 мс для завершения FAR от смещения туловища геккона до восстановления контакта дерева с передними ногами (дополнительный фильм 1). На пятой стадии геккон восстанавливался, наклоняя туловище вперед к стволу дерева, восстанавливая контакт передней части стопы (рис. 2h).
2h).
Динамическая модель реакции при остановке падения
Чтобы получить представление о возможном влиянии хвоста на успешность приземления, мы разработали упрощенную плоскую модель динамики твердого тела геккона во время наклона FAR назад.На видеозаписях, снятых в тропическом лесу, мы заметили, что задние лапы гекконов не регрессируют и не соскальзывают во время маневра с наклоном назад. Для количественной оценки FAR мы представили задние лапы в виде шарнирного соединения, в котором компонент силы реакции наблюдается по нормали и по касательной к вертикальной поверхности дерева (рис. 3), а туловище геккона — в виде единого жесткого однородного тела, вращающегося вокруг этого сустава (рис. 3). синий овал на рис. 3) длиной \({L}_{B}\).
По сравнению с адгезивной системой стопы геккона, сжимающей дерево, трение хвоста, которое может создавать гладкая, крупная и неспециализированная субкаудальная чешуя, на порядки ниже.Кроме того, трение хвоста может создавать только минимальный крутящий момент для тела из-за небольшого плеча момента между ним и точкой поворота на задних лапах. Поэтому мы относимся к нему как к незначительному результату такого поведения. Мы предлагаем еще больше упростить систему, предполагая пренебрежимо малые силы трения от хвоста и дерева, а также гребневую передачу сил через позвоночные позвонки и осевую и гипаксиальную мускулатуру, так что хвостовая сила \({F }_{T}\), может быть представлена как точечная нагрузка, нормальная к вертикальной поверхности дерева, расположенная на расстоянии \({L}_{T}\) от шарнирного соединения, через которое усилия могут быть жестко передается на туловище.Полный вывод полученных уравнений движения находится в разделе «Методы».
Поэтому мы относимся к нему как к незначительному результату такого поведения. Мы предлагаем еще больше упростить систему, предполагая пренебрежимо малые силы трения от хвоста и дерева, а также гребневую передачу сил через позвоночные позвонки и осевую и гипаксиальную мускулатуру, так что хвостовая сила \({F }_{T}\), может быть представлена как точечная нагрузка, нормальная к вертикальной поверхности дерева, расположенная на расстоянии \({L}_{T}\) от шарнирного соединения, через которое усилия могут быть жестко передается на туловище.Полный вывод полученных уравнений движения находится в разделе «Методы».
Хвосты уменьшают нагрузку на ноги и снижают падение
Учитывая оценки нашей динамической модели, сила задней ноги, \({F}_{F}\), необходимая для удержания ящерицы прикрепленной к вертикальному субстрату, будет обратно пропорциональна длине хвоста. (Уравнение 4, Методы). Хотя это указывает на важность хвоста, это не свидетельствует о том, что состояние максимального наклона назад является критической точкой, при которой отрыв задних лап может привести к падению. Чтобы исследовать условия силы стопы на протяжении всего маневра с наклоном назад, мы можем вместо этого рассмотреть три случая, для которых возможны простые численные решения уравнений движения (подробности расчета см. В разделе «Методы»). Эти три случая представляют собой постоянное угловое замедление (\(\ddot{\theta}\) = постоянное), постоянное хвостовое усилие (\({F}_{T}\) = постоянное) и пропорциональное хвостовое усилие (\({ F}_{T}\)/ \(\theta\) = константа), где константа в каждом случае может использоваться в качестве подгоночного параметра. Физически постоянное замедление будет представлять собой минимальный крутящий момент в точке поворота и наиболее постепенное замедление тангажа назад.Постоянная сила хвоста представляла бы максимальную механическую работу, которую можно было бы приложить, если бы сила хвоста была ограничена мускулатурой хвоста. Пропорциональная хвостовая сила будет представлять упругую реакцию ткани тела. В действительности истинная реакция хвоста, вероятно, будет комбинацией этих случаев, например, эластичность ткани и активная мышечная сила вместе взятые.
Чтобы исследовать условия силы стопы на протяжении всего маневра с наклоном назад, мы можем вместо этого рассмотреть три случая, для которых возможны простые численные решения уравнений движения (подробности расчета см. В разделе «Методы»). Эти три случая представляют собой постоянное угловое замедление (\(\ddot{\theta}\) = постоянное), постоянное хвостовое усилие (\({F}_{T}\) = постоянное) и пропорциональное хвостовое усилие (\({ F}_{T}\)/ \(\theta\) = константа), где константа в каждом случае может использоваться в качестве подгоночного параметра. Физически постоянное замедление будет представлять собой минимальный крутящий момент в точке поворота и наиболее постепенное замедление тангажа назад.Постоянная сила хвоста представляла бы максимальную механическую работу, которую можно было бы приложить, если бы сила хвоста была ограничена мускулатурой хвоста. Пропорциональная хвостовая сила будет представлять упругую реакцию ткани тела. В действительности истинная реакция хвоста, вероятно, будет комбинацией этих случаев, например, эластичность ткани и активная мышечная сила вместе взятые. Для каждого из них мы прогнозируем силы тангажа для наблюдаемых гекконов, используя начальную угловую скорость тангажа, измеренную во время среднего тангажа (рис.2h) в качестве начального условия и установите массу и длину твердого тела в модели на среднюю массу тела и длину животных (см. Дополнительную таблицу S1). Результаты этого анализа проиллюстрированы на рис. 4a–c. Очевидно, что наибольшая составляющая силы в каждом случае обусловлена угловым замедлением тела, которое представляет собой рассеивание гекконом кинетической энергии, накопленной во время его планирования. Сравнивая предсказанные профили угла наклона назад с измерениями реального геккона (рис.4г, д) мы видим совпадение как по пиковому углу тангажа, так и по длительности в случае постоянного торможения. Постоянное замедление потребует минимальной силы в течение заданного периода замедления.
Для каждого из них мы прогнозируем силы тангажа для наблюдаемых гекконов, используя начальную угловую скорость тангажа, измеренную во время среднего тангажа (рис.2h) в качестве начального условия и установите массу и длину твердого тела в модели на среднюю массу тела и длину животных (см. Дополнительную таблицу S1). Результаты этого анализа проиллюстрированы на рис. 4a–c. Очевидно, что наибольшая составляющая силы в каждом случае обусловлена угловым замедлением тела, которое представляет собой рассеивание гекконом кинетической энергии, накопленной во время его планирования. Сравнивая предсказанные профили угла наклона назад с измерениями реального геккона (рис.4г, д) мы видим совпадение как по пиковому углу тангажа, так и по длительности в случае постоянного торможения. Постоянное замедление потребует минимальной силы в течение заданного периода замедления.
a – c Смоделированные профили усилия на стопу во время FAR, с постоянным угловым замедлением, постоянным усилием на хвост и пропорциональным усилием на хвост соответственно. d Последовательность изображений геккона. Начальная угловая скорость, измеренная у дикого геккона, использовалась в качестве граничного условия для модельного решения. e Сравнение динамики модели и животного. Случай с постоянным угловым ускорением показывает такой же максимальный угол наклона назад и продолжительность наклона назад, как и в данных о животных. f Требуемая пиковая сила сцепления стопы в зависимости от длины хвоста, согласно прогнозу модели. Более короткие хвосты требуют большей силы сцепления стопы, что может объяснить меньший успех бесхвостых животных. Решая уравнения модели для диапазона длин хвоста, мы наблюдаем взаимосвязь между длиной хвоста и силой сцепления при приземлении.Мы обнаружили согласованность между тремя опробованными случаями простого решения (см. рис. 4a–c), показывая, что укороченный хвост приводит к значительному увеличению силы стопы. На графике вертикальные линии указывают длину хвоста и длину основания хвоста у гекконов, подвергшихся каудотомии.
d Последовательность изображений геккона. Начальная угловая скорость, измеренная у дикого геккона, использовалась в качестве граничного условия для модельного решения. e Сравнение динамики модели и животного. Случай с постоянным угловым ускорением показывает такой же максимальный угол наклона назад и продолжительность наклона назад, как и в данных о животных. f Требуемая пиковая сила сцепления стопы в зависимости от длины хвоста, согласно прогнозу модели. Более короткие хвосты требуют большей силы сцепления стопы, что может объяснить меньший успех бесхвостых животных. Решая уравнения модели для диапазона длин хвоста, мы наблюдаем взаимосвязь между длиной хвоста и силой сцепления при приземлении.Мы обнаружили согласованность между тремя опробованными случаями простого решения (см. рис. 4a–c), показывая, что укороченный хвост приводит к значительному увеличению силы стопы. На графике вертикальные линии указывают длину хвоста и длину основания хвоста у гекконов, подвергшихся каудотомии.![]() Горизонтальные линии показывают среднюю массу тела отловленных гекконов и измеренную силу сцепления со стеклом близкородственного вида геккона Hemidactylus frenatus .
Горизонтальные линии показывают среднюю массу тела отловленных гекконов и измеренную силу сцепления со стеклом близкородственного вида геккона Hemidactylus frenatus .
Мы можем расширить этот анализ и предсказать среднее усилие на хвост в диапазоне значений длины хвоста (рис.4е). Мы находим отношение обратной пропорциональности, указанное уравнением. (4) в методах оставались доминирующими, даже когда другие условия в уравнении. (3) включены (см. рис. 10 в 15 ). Сравнивая типичную длину основания хвоста, оставшуюся после каудальной автономии у геккона, мы можем видеть, что эта длина представляет собой внезапное и резкое увеличение силы, необходимой для стопы, до уровня, на порядок превышающего массу тела или выше.
Прогнозы модели согласуются с нашими выводами о снижении продуктивности бесхвостых животных.Это означает, что животные с длинными хвостами могут эффективно уменьшить \({F}_{F}\), необходимые для удержания геккона на дереве за его задние ноги, поскольку это противодействует большим опрокидывающим моментам. Напротив, у бесхвостых ящериц \({L}_{T}\) намного короче, чем у ящериц с целым хвостом. Отсюда следует, что для обеспечения успешного приземления у бесхвостых гекконов требуется большее усилие на ноги, потенциально превышающее критический уровень напряжения, который могут выдержать задние ноги. Согласно этому прогнозу, конкретное последствие для 90 193 H.platyurus заключается в том, что сила стопы, необходимая для удержания бесхвостого геккона, пытающегося приземлиться, от падения, будет примерно в пять раз больше, чем у хвостатого геккона (рис. 4f). Хотя нам неизвестна критическая \({F}_{F}\) или максимальная сила, с которой задние ноги могли бы цепляться за дерево, прежде чем сместиться, оказывается, что для данного приземления на вертикальный субстрат \({F}_{F}\) у бесхвостых животных с большей вероятностью превысит этот порог, что приведет к падению.Это дает механистическое объяснение функции хвоста в стабилизации посадочного маневра. Кроме того, это согласуется с разницей в производительности, наблюдаемой в поле, где успешные приземления были обнаружены в подавляющем большинстве испытаний с хвостатыми гекконами, планирующими к дереву (87%, n = 23, объединяя наблюдения из 16 испытаний с близкой дальнего ракурса и 7 попыток с дальнего ракурса, в которых видно приземление) по сравнению с катастрофическим падением, наблюдаемым у бесхвостых животных, которые теряли устойчивость при столкновении, падали кубарем, неконтролируемым образом отскакивали, чтобы упасть на лесная подстилка (Дополнительный фильм 1).
Напротив, у бесхвостых ящериц \({L}_{T}\) намного короче, чем у ящериц с целым хвостом. Отсюда следует, что для обеспечения успешного приземления у бесхвостых гекконов требуется большее усилие на ноги, потенциально превышающее критический уровень напряжения, который могут выдержать задние ноги. Согласно этому прогнозу, конкретное последствие для 90 193 H.platyurus заключается в том, что сила стопы, необходимая для удержания бесхвостого геккона, пытающегося приземлиться, от падения, будет примерно в пять раз больше, чем у хвостатого геккона (рис. 4f). Хотя нам неизвестна критическая \({F}_{F}\) или максимальная сила, с которой задние ноги могли бы цепляться за дерево, прежде чем сместиться, оказывается, что для данного приземления на вертикальный субстрат \({F}_{F}\) у бесхвостых животных с большей вероятностью превысит этот порог, что приведет к падению.Это дает механистическое объяснение функции хвоста в стабилизации посадочного маневра. Кроме того, это согласуется с разницей в производительности, наблюдаемой в поле, где успешные приземления были обнаружены в подавляющем большинстве испытаний с хвостатыми гекконами, планирующими к дереву (87%, n = 23, объединяя наблюдения из 16 испытаний с близкой дальнего ракурса и 7 попыток с дальнего ракурса, в которых видно приземление) по сравнению с катастрофическим падением, наблюдаемым у бесхвостых животных, которые теряли устойчивость при столкновении, падали кубарем, неконтролируемым образом отскакивали, чтобы упасть на лесная подстилка (Дополнительный фильм 1). Эксперименты с гекконами, сталкивающимися с волнениями во время вертикального бега, показали, что они могут отталкиваться от стены, чтобы компенсировать отклонение назад, вызванное соскальзыванием ноги, в то время как бесхвостые животные падают кубарем 4 . Гекконы с неповрежденным хвостом также могли использовать более крупный моментный рычаг для эффективного преодоления еще больших скользких промежутков, поскольку они продемонстрировали «реакцию на подножку» 4 , которая позволяла восстанавливаться при значительных углах наклона назад до 60 °. Подобный механизм, вероятно, используется для управления посадкой.
Эксперименты с гекконами, сталкивающимися с волнениями во время вертикального бега, показали, что они могут отталкиваться от стены, чтобы компенсировать отклонение назад, вызванное соскальзыванием ноги, в то время как бесхвостые животные падают кубарем 4 . Гекконы с неповрежденным хвостом также могли использовать более крупный моментный рычаг для эффективного преодоления еще больших скользких промежутков, поскольку они продемонстрировали «реакцию на подножку» 4 , которая позволяла восстанавливаться при значительных углах наклона назад до 60 °. Подобный механизм, вероятно, используется для управления посадкой.
Эти результаты подтверждают гипотезу, основанную на полевых наблюдениях, о том, что хвосты используются для стабилизации аварийных или жестких приземлений и контроля сильных ударных сил, действующих на конечности, что позволяет эффективно садиться на вертикальные цели на высокой скорости. Чтобы предоставить независимую линию доказательств этой гипотезы в дополнение к математической модели, мы также провели эксперименты с масштабированной физической моделью робота, которая включает сбор данных о силе.
Физическая модель робота поддерживает стабилизацию приземления хвостами
Изучение динамики приземления с использованием физической модели 15,16,17 позволяет проводить прямые измерения оценок из нашей математической модели.Мы использовали динамически аналогичную роботизированную модель, чтобы проверить стабилизирующий эффект хвостов на устойчивость при посадке. Мы измерили силы, возникающие при запуске модели робота на вертикальную посадочную поверхность с помощью катапульты при заданных скоростях от 3 до 5 м/с (см. дополнительную информацию, дополнительный рисунок S1) при углах подхода, измеренных для гекконов в полевых условиях (рис. . 1в, г). Подробную информацию о размерах робота, конструкции, экспериментальной установке и процедуре измерения можно найти в разделе «Методы».
Кинематика физической модели
Мы провели 79 попыток приземления с физической моделью, ориентированной так, как это наблюдается у гекконов в природе (рис. 5a–d). Результаты показали количественно и качественно сходное поведение между моделью робота, нашей динамической математической моделью и гекконами (рис. 5e–i), включая чрезмерное вращение после контакта головы и передней части стопы с последующим отклонением туловища назад. за хвост с возможным выздоровлением (дополнительный фильм 2). Подробное рассмотрение механики удара при приземлении с использованием измерений позы из видео показывает, почему хвостовой рефлекс предпочтительнее.Когда передние ноги впервые касаются стены, поступательный импульс модели робота быстро преобразуется в угловой момент. Это означает, что когда задние лапы модели робота достигнут посадочной поверхности, модель будет стремиться продолжить вращение, а передние лапы оторвутся, если силы сцепления будет недостаточно. Затем модель робота будет поворачиваться от посадочной поверхности к земле, насколько это позволяет ее геометрия. На этом этапе бесхвостый робот, скорее всего, оторвет задние лапы от стены, в то время как пассивный хвост обеспечивает сопротивление откидыванию назад и эффективно действует как вращающийся амортизатор.
 5: Поведение тангажа при приземлении в физической модели робота с хвостом.
5: Поведение тангажа при приземлении в физической модели робота с хвостом. (дополнительный фильм 2). a Визуализация установки катапульты и посадочной площадки с моделью робота и силовой плитой. Для наглядности пусковая установка показана ближе к поверхности насеста, чем в реальном эксперименте. b Фотография мягкого роботизированного спускаемого аппарата на посадочной поверхности эксперимента. c Иллюстрация, показывающая работу хвостовой части с приводом от сухожилия с натяжным сервоприводом для отклонения хвостовой части. d Изображение мягкого роботизированного посадочного модуля, установленного на дереве снаружи, с большим наклоном назад. e – i Последовательность приземления модели робота, показывающая поведение при наклоне назад и оценку позы с помощью программного обеспечения (DeepLabCut). j Результат отслеживания, показывающий траектории головы, бедра и кончика хвоста для успешного ( n = 22) и неудачного ( n = 16) приземлений для пассивного хвоста. k Среднее по ансамблю из 22 успешных приземлений из 38 испытаний, показывающее разброс поведения тангажа ( n = 22).
k Среднее по ансамблю из 22 успешных приземлений из 38 испытаний, показывающее разброс поведения тангажа ( n = 22).
Краткий обзор кинематики, наблюдаемой при видеографическом анализе робота, представлен на рис. 5j, показывающем отдельно повторяющиеся успешные и неудачные приземления с пассивным хвостом. Как было предложено динамической моделью в предыдущем разделе, типичным видом отказа при приземлении является неконтролируемая тангаж назад, который приводит к потере контакта с задними ногами, в то время как успешное приземление останавливает и восстанавливает тангаж назад. Отклонение назад позволяет модели робота рассеивать угловой момент, полученный в начальной фазе приземления, медленнее и с меньшим усилием, и, следовательно, более постепенное полное замедление и поглощение кинетической энергии планирования, чем это было бы возможно без отвода назад. и частичный отрыв от посадочной поверхности.
Среднее по ансамблю из 26 испытаний с успешным восстановлением тангажа назад и активным хвостовым рефлексом показано на рис. 5k, с нанесенным на график диапазоном тангажа и стандартной ошибкой ансамбля. Модель робота показала среднюю начальную скорость тангажа 1438°/с по сравнению с 2057°/с в наблюдениях за гекконами. Были обнаружены аналогичные пиковые углы наклона назад, но более медленная скорость восстановления от этого пикового угла наклона назад: для восстановления требуется примерно в три раза больше времени, чем для достижения максимального угла, в отличие от более симметричного FAR, наблюдаемого у гекконов.В первую очередь это связано с пассивным изгибом туловища из силиконового эластомера (Sil-30, принтер Carbon Inc. M2), который податлив и лишен мускулатуры животного. Эта атрибуция подтверждается теоретическими профилями наклона назад (рис. 4e), которые не учитывают никаких диссипативных сил и являются симметричными, в отличие от испытаний на роботах и животных. Обезразмеривание кинематики приземления как \(v/{L}_{B}{\dot{\theta}}_{0}\) (где \(v\) — скорость удара, \({L}_{ B}\) — длина тела, а \({\dot{\theta}}_{0}\) — начальная угловая скорость наклона назад), которая представляет собой линейную кинетическую энергию удара по отношению к кинетической энергии вращения.
5k, с нанесенным на график диапазоном тангажа и стандартной ошибкой ансамбля. Модель робота показала среднюю начальную скорость тангажа 1438°/с по сравнению с 2057°/с в наблюдениях за гекконами. Были обнаружены аналогичные пиковые углы наклона назад, но более медленная скорость восстановления от этого пикового угла наклона назад: для восстановления требуется примерно в три раза больше времени, чем для достижения максимального угла, в отличие от более симметричного FAR, наблюдаемого у гекконов.В первую очередь это связано с пассивным изгибом туловища из силиконового эластомера (Sil-30, принтер Carbon Inc. M2), который податлив и лишен мускулатуры животного. Эта атрибуция подтверждается теоретическими профилями наклона назад (рис. 4e), которые не учитывают никаких диссипативных сил и являются симметричными, в отличие от испытаний на роботах и животных. Обезразмеривание кинематики приземления как \(v/{L}_{B}{\dot{\theta}}_{0}\) (где \(v\) — скорость удара, \({L}_{ B}\) — длина тела, а \({\dot{\theta}}_{0}\) — начальная угловая скорость наклона назад), которая представляет собой линейную кинетическую энергию удара по отношению к кинетической энергии вращения. {2}/g\) (где \(g\) — ускорение свободного падения).Это имеет значение 2,7 × 10 4 у робота и 1,9 × 10 4 у животного (см. гекконы.
{2}/g\) (где \(g\) — ускорение свободного падения).Это имеет значение 2,7 × 10 4 у робота и 1,9 × 10 4 у животного (см. гекконы.
Измерение силы на физической модели
Мы протестировали модель робота с использованием датчика силы для регистрации силы стопы во время приземления (см. Методы). В этом эксперименте модель робота была запущена под фиксированным углом 45° (что отражает наблюдаемые данные о животных на рис.1б, в) и фиксированной мощности лаунчера. Мы проверили пассивную роль длины хвоста и влияние активного хвостового рефлекса, инициируемого контактным переключателем. В каждом случае была взята средняя сила по нескольким испытаниям и построено среднее значение по ансамблю (дополнительный фильм 3). Эти данные представлены на рис. 6, где сила нанесена выше соответствующего угла наклона назад. Результаты, проиллюстрированные на рис. 6a–c, показывают, что укороченный хвост значительно увеличил силу на ноги, что согласуется с прогнозом математической модели и наблюдаемыми трудностями приземления бесхвостых гекконов. По всем трем длинам хвоста мы видим согласованные профили наклона назад, указывающие на то, что увеличение силы в основном связано с самим изменением длины хвоста, а не с влиянием потери хвоста на динамику туловища.
По всем трем длинам хвоста мы видим согласованные профили наклона назад, указывающие на то, что увеличение силы в основном связано с самим изменением длины хвоста, а не с влиянием потери хвоста на динамику туловища.
(Дополнительный фильм 3). a – c Среднее по ансамблю профили силы на стопу при приземлении и тангаже с различной длиной пассивного оперения ( n = 7, 5 и 4 соответственно для a – c ).Сила стопы нормализована весом робота, а положительная сила представляет собой сцепление с посадочной пластиной. d Сила стопы с хвостом во всю длину и активный хвостовой рефлекс, вызванный контактом передней части стопы ( n = 5). Угол наклона назад подавляется, а сила пассивного корпуса уменьшается. e – h Расстояние между головой модели робота и посадочной пластиной с течением времени, показывающее стадию наклона назад по отношению к каждому профилю силы ( n = 7, 5, 4 и 5 соответственно, показывающее те же испытания, что и a – d ).
На рис. 6d, h мы видим эффект активной реакции хвоста с полноразмерным хвостом, в котором обнаруженный контакт передних лап со стеной инициировал закручивание хвоста вниз, управляемое сервоприводом. Мы обнаружили, что в этих тестах действие хвоста приводило к более резкому уменьшению усилия на стопу, чем в пассивном полноразмерном хвостовом корпусе, и к частичному подавлению тангажа назад.
Во всем диапазоне проверенных углов подхода и скоростей мы показываем, что модель хвостатого робота превосходит бесхвостую платформу, что согласуется с наблюдениями за гекконами в природе.Модель бесхвостого робота смогла успешно приземлиться только в 15% испытаний ( n = 20) по сравнению с 55% с наличием хвоста ( n = 38) (рис. 7a). Разница между показателями хвостатых и бесхвостых значительна ( х 2 = 8,75, P = 0,0031, 1 df). Если мы затем рассчитаем средние значения силы на ступнях для экспериментов на рис. 6, мы обнаружим, что хвост уменьшает силу во время торможения (рис. 7b) в соответствии с предложенной нами упрощенной механической математической моделью, так что сила стопы увеличивается обратно пропорционально длине хвоста.Мы находим статистически значимые различия между разными длинами хвостов ( F (3,17) = 43, P < 10 −7 , дисперсионный анализ [ANOVA]).
7b) в соответствии с предложенной нами упрощенной механической математической моделью, так что сила стопы увеличивается обратно пропорционально длине хвоста.Мы находим статистически значимые различия между разными длинами хвостов ( F (3,17) = 43, P < 10 −7 , дисперсионный анализ [ANOVA]).
a Успех приземления роботизированной модели показал, что наличие хвоста значительно повышает эффективность приземления по сравнению с бесхвостым состоянием. b График средней силы сцепления стопы во время наклона назад для трех различных испытанных длин хвоста (среднее значение данных силы, представленных на рис.6а–г), и с включенным активным хвостовым рефлексом. Изолинии силы, пропорциональные длине хвоста 90 187 -1 90 188 , нанесены на задний план для сравнения с зависимостью, указанной теоретической моделью. Линии, соединяющие столбцы, показывают значения P из сравнений ANOVA. Точки данных длины хвоста для 100% длины хвоста смещены на ±1% для облегчения сравнения активных и пассивных хвостов, хотя истинные длины хвостов идентичны. Размер выборки, n = 4, 5, 7 и 5 для 25%, 50% и 100% пассивных и активных хвостов соответственно.
Результаты показывают, что активная реакция хвоста может также управлять приземлением и еще больше снизить мгновенные силы стопы, уменьшая тангаж назад во время реакции (рис. 6d–h), хотя дополнительная сила, прикладываемая хвостом, означает сцепление сила не стремится к нулю (рис. 6d), что уменьшает снижение средней силы по всему FAR (рис. 7b). Наши эксперименты с физической моделью робота (рис. 5 и 6) продемонстрировали возможность повышения устойчивости приземления за счет механического опосредования с использованием хвоста, как это наблюдается у неспециализированных древесных ящериц и роботов с ногами.Мы предполагаем, что такие конструкции хвостового типа потенциально могут дополнять преимущественно аэродинамически управляемые приземления, наблюдаемые у птиц 24 , а также у планирующих самолетов-роботов 16 для повышения надежности.
Роль механического посредничества в управлении приземлением животных и роботов
Результаты кинематического анализа данных, собранных в полевых условиях (рис. 1), подтверждают прогнозы нашей гипотетической динамической математической модели (рис. 2, уравнения (1) –(4)), предполагая, что конструкции хвостового типа обеспечивают устойчивость и могут быть важны для смягчения последствий жестких посадок.Напротив, планирующие млекопитающие (например, белки-летяги 37 ) избегают жестких посадок и коротких скольжений, поскольку более крутые углы захода на посадку препятствуют их способности использовать воздушное торможение путем увеличения тангажа и рассеивать энергию сильного удара одновременно на всех четырех конечностях 38 .
У гекконов есть когти и клейкие подушечки, и они могут способствовать прикреплению во время удара. Хотя было нецелесообразно измерять относительный вклад когтей и щетинок в посадку геккона в этом полевом эксперименте в тропическом лесу, предыдущая работа с гекконами, цепляющимися за пиломатериалы, показала, что удаление когтей снижает силу прикрепления 39 ; однако влияние на макрошероховатые поверхности, такие как кора дерева, неизвестно. Работа с беспозвоночными (жуками Coleoptera) показала, что когти действительно действуют синергетически с клейкими подушечками, но воздействие когтей значительно снижается по мере увеличения размера шероховатости 40 . Даже если адгезивное действие и действие когтей могут синергетически способствовать адгезии у гекконов, неясно, используются ли они оба в FAR. Вращение тела и стопы назад может затруднить зацепление изогнутого когтя по сравнению с клейкими подушечками. Относительная важность каждой из этих адгезивных систем во время FAR заслуживает дальнейшего изучения.
Работа с беспозвоночными (жуками Coleoptera) показала, что когти действительно действуют синергетически с клейкими подушечками, но воздействие когтей значительно снижается по мере увеличения размера шероховатости 40 . Даже если адгезивное действие и действие когтей могут синергетически способствовать адгезии у гекконов, неясно, используются ли они оба в FAR. Вращение тела и стопы назад может затруднить зацепление изогнутого когтя по сравнению с клейкими подушечками. Относительная важность каждой из этих адгезивных систем во время FAR заслуживает дальнейшего изучения.
Стратегии, включающие реакцию с помощью хвоста, могут повысить успешность вертикальной посадки и устойчивость как животных, так и роботов. Азиатские плоскохвостые гекконы не используют строго контролируемое сваливание со значительным замедлением при приземлении во время планирования на коротких дистанциях. Небольшой размер позволяет использовать простое механическое решение для приземления — лобовое столкновение, при котором кинетическая энергия поглощается 34 . Многочисленные мелкие летающие, бегающие и прыгающие животные, такие как пчелы 41 , плодовые мушки 42 , саранча 43 и тараканы 34,44 часто сталкиваются и приземляются лоб в лоб.Учитывая влияние размера, небольшая ящерица весом около 2 граммов может быть в состоянии врезаться в дерево без травм, в то время как летающий лемур весом около 2 дюймов может получить травму и пластическую деформацию в виде повреждения тканей. Наша гипотеза о том, что хвосты повышают стабильность приземления, выступая в качестве противодействующего рычага весу тела геккона и, таким образом, уменьшая усилие на лапы, подтверждается как нашей теоретической, так и физической моделью, а также другими роботизированными насестами 15 . Животные и роботы могут использовать такие механически опосредованные решения, чтобы упростить управление приземлением.Реакции хвоста во время приземления гекконов могут быть инициированы тем же рефлексом, обнаруженным во время лазания, когда соскальзывание передней части стопы стимулирует вентральное сгибание хвоста для обеспечения поддержки 4 .
Многочисленные мелкие летающие, бегающие и прыгающие животные, такие как пчелы 41 , плодовые мушки 42 , саранча 43 и тараканы 34,44 часто сталкиваются и приземляются лоб в лоб.Учитывая влияние размера, небольшая ящерица весом около 2 граммов может быть в состоянии врезаться в дерево без травм, в то время как летающий лемур весом около 2 дюймов может получить травму и пластическую деформацию в виде повреждения тканей. Наша гипотеза о том, что хвосты повышают стабильность приземления, выступая в качестве противодействующего рычага весу тела геккона и, таким образом, уменьшая усилие на лапы, подтверждается как нашей теоретической, так и физической моделью, а также другими роботизированными насестами 15 . Животные и роботы могут использовать такие механически опосредованные решения, чтобы упростить управление приземлением.Реакции хвоста во время приземления гекконов могут быть инициированы тем же рефлексом, обнаруженным во время лазания, когда соскальзывание передней части стопы стимулирует вентральное сгибание хвоста для обеспечения поддержки 4 . Способности, связанные с направленным в воздухе спуском и приземлением в докритических условиях, возникающие у относительно неспециализированных древесных ящериц, могут подтверждать представление о том, что появление поведения «предшествует внешней морфологической эволюции» 45 .
Способности, связанные с направленным в воздухе спуском и приземлением в докритических условиях, возникающие у относительно неспециализированных древесных ящериц, могут подтверждать представление о том, что появление поведения «предшествует внешней морфологической эволюции» 45 .
При проектировании надежных мультимодальных роботов мы можем изучить стратегии природы, которые могут привести к достаточным решениям проблемы вертикальной посадки в условиях временной потери аэродинамического контроля или в условиях неструктурированной местности.Наше исследование может послужить источником вдохновения для роботов-сиделок 19 , обеспечивающих большую устойчивость при посадке и устойчивость к возмущениям за счет использования механически опосредованных конструкций для упрощения управления. Мы добавляем еще одну неожиданную функцию к списку моделей поведения хвостов гекконов, подтверждающих утверждение Roderick et al. 25 , что «разнообразие эффективных биологических решений предлагает «нестандартное» дизайнерское вдохновение для робототехников», в данном случае, что касается стратегий приземления.
Как летают планеры и чем они отличаются от самолетов с двигателями
В то время как самолеты и планеры имеют много общего в конструкции, аэродинамике и пилотировании, отсутствие двигателя коренным образом меняет способ полета планера.
Обтекаемый фюзеляж
Поскольку двигатель не занимает места, размер планера соответствует грузу, который он несет; фюзеляж спроектирован как можно меньше и легче. Большинство планеров имеют места для двух человек в небольшой кабине, при этом пилоты сидят в полулежачем положении.Самолеты с двигателями, где пилоты обычно сидят прямо. Почему разница? Сидя с откинутой спинкой, кабина и фонарь могут быть более обтекаемыми, что создает меньшее сопротивление в полете.
Поверхность фюзеляжа планера спроектирована так, чтобы быть как можно более гладкой, что позволяет самолету летать по воздуху с минимальным паразитным сопротивлением. Самые ранние планеры были построены из дерева, покрытого парусиной; более поздние версии были сделаны из клепаных конструкционных алюминиевых обшивок. К сожалению, швы и заклепки, типичные для алюминия, значительно снижали характеристики из-за паразитного сопротивления, поэтому планеры продолжали адаптироваться.Сегодня многие передовые планеры изготавливаются из бесшовных материалов, таких как стекловолокно и углеродное волокно.
К сожалению, швы и заклепки, типичные для алюминия, значительно снижали характеристики из-за паразитного сопротивления, поэтому планеры продолжали адаптироваться.Сегодня многие передовые планеры изготавливаются из бесшовных материалов, таких как стекловолокно и углеродное волокно.
Крылья с большим удлинением
Планеры имеют крылья с большим удлинением, что означает, что они длиннее и уже, чем крылья обычных самолетов с двигателями.
Удлинение рассчитывается путем деления квадрата размаха крыла на площадь крыла. Как вы можете видеть на диаграмме выше, планер Schleicher ASH 31 имеет удлинение 33,5, а у Piper Cherokee соотношение удлинения равно 5.6.
Крылья с большим удлинением производят меньшее индуктивное сопротивление, что делает их такими эффективными на планерах. Так почему же не все самолеты имеют крылья с большим удлинением? Есть несколько разных факторов.
Во-первых, крылья с большим удлинением изгибаются больше, чем более короткие крылья, а это означает, что они должны быть разработаны с более прочными конструктивными характеристиками. Поскольку планеры легкие, изгиб не представляет такой большой проблемы. Но с более тяжелыми самолетами, такими как авиалайнеры, крыло с большим удлинением было бы непрактичным.Далее, крылья с большим удлинением более подвержены деформации крыла при использовании элеронов. Поскольку планеры летают на относительно низких скоростях, деформация крыльев не так выражена, но для быстрого самолета это будет реальной проблемой.
Поскольку планеры легкие, изгиб не представляет такой большой проблемы. Но с более тяжелыми самолетами, такими как авиалайнеры, крыло с большим удлинением было бы непрактичным.Далее, крылья с большим удлинением более подвержены деформации крыла при использовании элеронов. Поскольку планеры летают на относительно низких скоростях, деформация крыльев не так выражена, но для быстрого самолета это будет реальной проблемой.
Еще одним важным фактором является маневренность. Крылья с большим удлинением снижают маневренность из-за более высокого момента инерции. Думайте об этом как о канатоходцах: они несут длинный стержень, чтобы уравновесить себя, не давая им быстро упасть влево или вправо.Это здорово, если вы хотите оставаться на одном месте, но не так здорово, если вы хотите быстро двигаться (или катиться) влево или вправо.
Наконец, размер аэропорта ограничивает соотношение сторон, которое может иметь самолет. Возьмем, к примеру, Боинг 777. Боинг 777 имеет удлинение примерно 9. Если бы он имел удлинение 30+, он не смог бы парковаться рядом с другими самолетами на рампе, а его крылья были бы настолько длинными, что свисали бы над рулежными дорожками. во время взлета и посадки. Понятно, что это было бы непрактично.
Если бы он имел удлинение 30+, он не смог бы парковаться рядом с другими самолетами на рампе, а его крылья были бы настолько длинными, что свисали бы над рулежными дорожками. во время взлета и посадки. Понятно, что это было бы непрактично.
Поверхности управления
Как и большинство самолетов, планеры используют для полета элероны, руль направления и руль высоты. На планерах установлены закрылки для контроля скорости снижения за счет увеличения сопротивления и подъемной силы. Многие современные планеры также используют воздушные тормоза или спойлеры, которые при использовании резко нарушают воздушный поток над крылом, увеличивая сопротивление и уменьшая подъемную силу.
Еще одно существенное различие между самолетами с двигателями и планерами заключается в том, что планеры обычно имеют только одно шасси, расположенное непосредственно под пилотом.Наличие только одной передачи значительно снижает вес, но что происходит с крыльями при взлете и посадке, когда у вас только одна передача? Законцовки крыла защищены полозьями или маленькими колесами, и когда планер приземляется, он опирается на основное шасси и одну из законцовок крыла.
Взлет планера
Поскольку у них нет двигателей, планеры обычно используют один из двух способов отрыва от земли:
1) Aero-Tow: Самолет с двигателем буксирует планер в воздух с помощью длинного троса.Внутри кабины пилот планера использует быстроразъемный механизм, чтобы освободить буксирный трос. Как только планер достигает нужной высоты, веревка отпускается, и планер и буксирный самолет поворачиваются в противоположных направлениях.
2) Спуск с помощью лебедки: Двигатель на земле приводит в действие лебедку, соединенную с тросовой системой запуска. Затем трос крепится к нижней части планера. После активации лебедки планер на высокой скорости тянется по земле к лебедке и взлетает.За короткий промежуток времени планер набирает значительную высоту во время этого процесса и отпускает трос лебедки, прежде чем продолжить полет.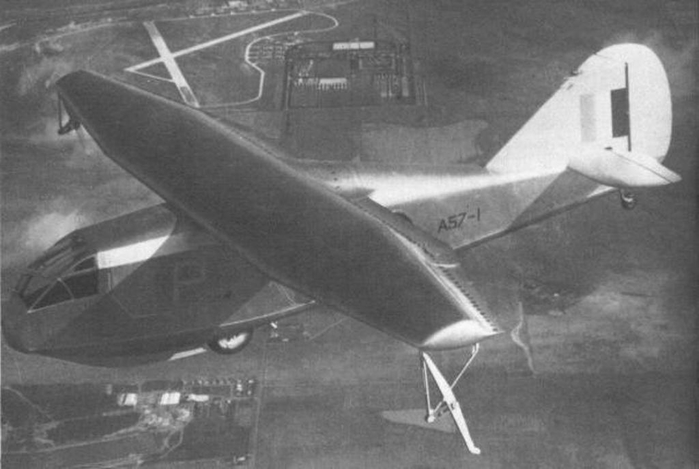
В полете
Коэффициент планирования измеряет характеристики планирования самолета; многие современные планеры имеют коэффициент планирования лучше 60: 1. Это означает, что если вы начнете с высоты 1 миля, вы сможете планировать 60 миль. Для сравнения, Boeing 747 имеет качество планирования 15:1.
Но если бы качество планирования было единственным, что удерживает планеры в воздухе, они бы не летали очень долго.Так как же они остаются в воздухе? Есть 3 основных типа восходящего воздуха, которые используют пилоты планеров:
1) Термики представляют собой столбы восходящего воздуха, образующиеся при нагревании поверхности Земли. Воздух у земли расширяется и поднимается вверх по мере нагревания поверхности Земли. Некоторые типы местности поглощают солнце быстрее, чем другие, например: асфальтированные автостоянки, темные поля, каменистая местность и т. д. Эти участки поглощают тепло и нагревают воздух над ними, создавая потоки теплового воздуха.
д. Эти участки поглощают тепло и нагревают воздух над ними, создавая потоки теплового воздуха.
Недавно образовавшиеся кучевые облака или птицы, парящие в воздухе, не взмахивая крыльями, обычно являются признаками термической активности. Когда пилот планера «термизируется», он находит эти тепловые колонны и летит на них. А поскольку термики часто могут охватывать лишь небольшую площадь, термики часто включают крутой поворот, чтобы оставаться внутри кармана поднимающегося воздуха.
2) Подъем хребта создается ветрами, дующими с гор, холмов или других хребтов. Вдоль наветренной стороны горы образуется полоса подъемной силы, где воздух перенаправляется вверх рельефом.Как правило, подъем хребта простирается всего на несколько сотен футов выше местности, которая его создает. Известно, что пилоты совершали «парение по хребту» на тысячи миль вдоль горных цепей.
3) Волновой подъем аналогичен гребневому подъему в том смысле, что он создается, когда ветер встречает гору.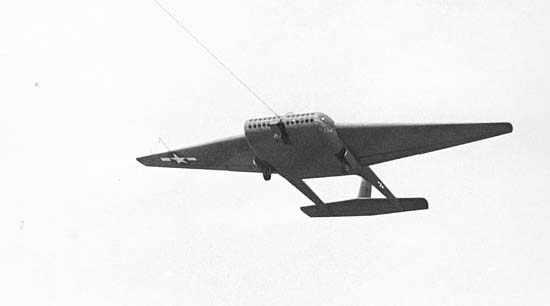 Тем не менее, волновой подъем создается на подветренной (подветренной) стороне пиков ветром, проходящим над вершиной горы. Волновой подъем можно определить по линзообразным облачным образованиям — они похожи на летающие тарелки.Волновой подъем может достигать тысячи футов в высоту, а планеры, катающиеся на волновом подъеме, могут достигать высоты более 35 000 футов.
Тем не менее, волновой подъем создается на подветренной (подветренной) стороне пиков ветром, проходящим над вершиной горы. Волновой подъем можно определить по линзообразным облачным образованиям — они похожи на летающие тарелки.Волновой подъем может достигать тысячи футов в высоту, а планеры, катающиеся на волновом подъеме, могут достигать высоты более 35 000 футов.
Обнаружение подъема и рыскания
Индикатор вертикальной скорости в кабине подскажет, набираете ли вы высоту или спускаетесь. Если вы летите на планере и вдруг видите, как индикатор вертикальной скорости подскакивает вверх, вы, вероятно, столкнулись с тепловым столбом и должны постараться оставаться внутри восходящего потока воздуха как можно дольше.
Планер скользит или скользит по воздуху, когда он не направлен прямо в направлении своего полета относительно воздушной массы вокруг него.Строка на лобовом стекле указывает пилоту планера, летит ли планер прямо (струна прямая) или рыскает (струна направлена вправо или влево). Как правило, пилоты планеров стараются держать тетиву прямо, поскольку при полете прямо по воздуху создается наименьшее сопротивление.
Как правило, пилоты планеров стараются держать тетиву прямо, поскольку при полете прямо по воздуху создается наименьшее сопротивление.
Балласт
Некоторые планеры несут балластные цистерны, заполненные водой. Более тяжелые планеры тонут быстрее, чем легкие. Вес не влияет на качество планирования, потому что, хотя более тяжелый планер может тонуть быстрее, он будет делать это на более высокой скорости.Планер снижается быстрее с большим весом, преодолевая такое же расстояние; это идеально подходит для полетов по пересеченной местности. Более тяжелый планер, полный балласта, имеет меньшую скороподъемность и меньшую продолжительность полета в условиях подъема. Водяной балласт можно сбросить в любой момент через сбросные клапаны, чтобы свести к минимуму эти летные характеристики и снизить скорость перед посадкой.
Посадка
По сравнению с посадкой на моторном самолете, при полете на планере есть несколько ключевых отличий.Во-первых, планеры не могут увеличить мощность, если они не попадут в зону приземления.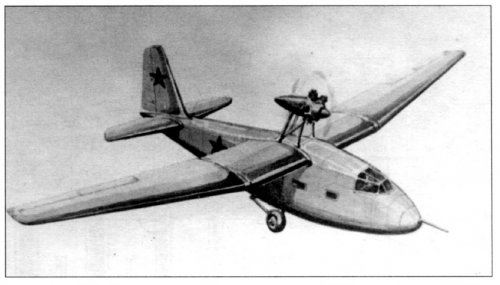 Это может показаться простой концепцией, но пилоты-планеристы обучены оценивать свой заход на посадку, поэтому они не приземляются коротко и всегда ждут, пока не будут уверены, что у них есть поле, прежде чем вводить сопротивление через закрылки или спойлеры.
Это может показаться простой концепцией, но пилоты-планеристы обучены оценивать свой заход на посадку, поэтому они не приземляются коротко и всегда ждут, пока не будут уверены, что у них есть поле, прежде чем вводить сопротивление через закрылки или спойлеры.
Сама посадка не слишком отличается от посадки на любом другом самолете, вы поднимаетесь до тех пор, пока подъемная сила не уменьшится, и пытаетесь слегка приземлиться. Так как планеры имеют одно колесо, это своего рода балансировка, чтобы держать крылья над землей как можно дольше.
Планеры — невероятные летательные аппараты, и при правильных атмосферных условиях они могут оставаться в воздухе часами или днями. Тщательный аэродинамический дизайн делает этих птиц быстрыми и уникальными.
И если у вас никогда не было возможности управлять планером, мы рекомендуем вам попробовать.
Станьте лучшим пилотом.
Подпишитесь, чтобы получать последние видео, статьи и викторины, которые сделают вас более умным и безопасным пилотом.
Полевая посадка — Информация о пилоте и клубе
Хотя пилоты-планеристы очень редко планируют приземляться где-либо, кроме взлетно-посадочной полосы или аэродрома, они должны быть готовы к посадке в полевых условиях. Тренировки по кругу, заходу на посадку и посадке основаны на том, что пилоту планера необходимо в должное время выполнить безопасную посадку. Обучение полевой посадке во время обучения для получения бронзы и кросс-кантри обеспечивает основу.Всем пилотам рекомендуется периодическая переподготовка и практика на мотоплане.
Несколько слов об управлении рисками
Во время приземления на поле существуют дополнительные опасности. Подавляющее большинство опасностей можно уменьшить с помощью обучения, осведомленности и опыта. Несчастные случаи с остановкой/пробуксовкой неизменно приводят к травмам, изменяющим жизнь. Основная причина несчастных случаев с остановкой / вращением — отвлечение внимания. Сценарий полевой посадки может стать очень захватывающим и привести к тому, что пилот будет отвлекаться от принципиально важной задачи управления планером.Пилоты с любым опытом легко отвлекаются. Во всех случаях и во все времена управление планером должно быть наивысшим приоритетом для пилотов.
Основная причина несчастных случаев с остановкой / вращением — отвлечение внимания. Сценарий полевой посадки может стать очень захватывающим и привести к тому, что пилот будет отвлекаться от принципиально важной задачи управления планером.Пилоты с любым опытом легко отвлекаются. Во всех случаях и во все времена управление планером должно быть наивысшим приоритетом для пилотов.
Инструктаж, инструктаж и руководство по технике безопасности
Руководство инструктора по BGA содержит рекомендации по обучению суждению о планировании схемы.
Инструктаж по технике безопасности при посадке на поле содержит рекомендации по выбору поля. Он предназначен для пилотов и инструкторов и должен использоваться во время обучения.
Руководство BGA по управлению рисками при полете на мотопланах является важным чтением для тех, кто проводит обучение полевой посадке.
Распознавание культур
Этот веб-сайт содержит полезные рекомендации по распознаванию сельскохозяйственных культур специально для пилотов планеров.
Обучающие видеоролики
Мемориальный фонд Теда Лысаковски спонсировал производство обучающих видеороликов, описывающих все аспекты приземления в полевых условиях;
Учебное видео по посадке в поле, глава 1 — выбор поля
Обучающее видео по посадке в поле, глава 2 – влияние ветра..
Обучающее видео по посадке в полевых условиях, глава 3 — уклон..
Обучающее видео по посадке в поле, глава 4 – что растет?
Учебное видео по посадке в поле, глава 5 – трава..
Учебное видео по полевой посадке, глава 6 – сток, заборы..
Учебное видео по полевой посадке, глава 7 – провода..
Учебное видео по полевой посадке, глава 8 – время сбора урожая..
Другие указания
Очень редко обычное приземление в поле приводит к осложнениям. BGA публикует Руководство для пилотов после приземления на поле.
Процедуры выхода за границу | Планеризм Байрон-Бей
Порядок приземления для пилотов-планеристов
Норм Сандерс
Планеры зависят от восходящего воздуха. Мощность самолета зависит от двигателей. Иногда что-то идет не так. В случае с двигателями вопрос не в том, «собирается ли двигатель заглохнуть», а в том, «когда он заглохнет». Если вы действительно хотите напугать себя, подумайте обо всех этих движущихся частях, обо всех гайках и болтах, обо всех этих шланговых соединениях и электрических клеммах.Одна поломка даже второстепенного компонента, и… тишина. С мотопланерами мы пытаемся рассматривать двигатель как эквивалент буксирующего самолета. Как только мы набираем высоту и глушим двигатель, мы — планеры. Конечно, подъемник вокруг побережья часто слабый или вообще отсутствует. Затем снова запускаем двигатель. Некоторым нравится «включать» зажигание, переводя его в положение «Вкл.», чтобы сэкономить время. Я чувствую, что это не очень хорошая идея, особенно для австралийцев, которые с рождения усвоили, что «Вкл» означает «вниз», а не «вверх». (Во всем виноваты Помы!) Я наблюдал, как опытный пилот, у которого был «включен» замок зажигания, перевернул его вниз, пытаясь запустить двигатель.
 Если бы пилот действительно был в аварийной ситуации, это могло бы иметь катастрофические последствия. Большинство скайдрайверов Cessna и Piper НИКОГДА не приземлялись без работающего двигателя. Инструктор сбавляет обороты, и ученик приближается к загону. На высоте 500 футов над уровнем земли инструктор (который, вероятно, тоже никогда не приземлялся с мертвой палкой) толкает газ вперед со словами: «Ну, мы бы сделали это. Пойдем.»
Если бы пилот действительно был в аварийной ситуации, это могло бы иметь катастрофические последствия. Большинство скайдрайверов Cessna и Piper НИКОГДА не приземлялись без работающего двигателя. Инструктор сбавляет обороты, и ученик приближается к загону. На высоте 500 футов над уровнем земли инструктор (который, вероятно, тоже никогда не приземлялся с мертвой палкой) толкает газ вперед со словами: «Ну, мы бы сделали это. Пойдем.»
Планеристы, конечно же, умеют приземляться без двигателей. Но если они не проведут всю свою летную карьеру прямо над родным полем, наступит время, когда им придется оценивать, приближаться и приземляться в новом месте — в отдалении.
Как и все приземления, хорошее приземление зависит от хорошего подхода. Планирование захода на посадку начинается до того, как самолет оторвется от земли. Помните «Снаружи» О в ХАОТИЧНОМ? Оценка «СНАРУЖИ» должна затем продолжаться в течение всего полета с небольшими сценариями: «Хорошо, двигатель только что заглох, где я собираюсь приземлиться?» «Сейчас много подъема, но что насчет того синего пятна впереди?» Пилоты должны постоянно искать на местности подходящие места для посадки, когда произойдет неизбежное и самолет начнет ВНИЗУ.
Вот где пилот планера имеет большое преимущество перед парашютистом. Парашютисты привыкли управлять скоростью снижения с помощью дроссельной заслонки. Нет газа = ПАНИКА!
Планеры оснащены воздушными тормозами/спойлерами, которые обеспечивают точный контроль при приближении к загону.
А что за загон? Идеальным было бы 1000-метровое, недавно выпасенное (но без животных), ровное поле без камней и линий электропередач, подходящее для подъема на аэробуксировщике или взлета на мотоплане. Конечно, большинство из них не соответствуют этому описанию, хотя некоторые из них подходят Западу.Следующий лучший загон будет иметь хороший доступ для трейлера через соседние ворота и находиться рядом с фермерским домом с дружелюбным фермером, холодным пивом и телефоном. (Мобильные телефоны часто находятся вне зоны действия.)
Связь может быть проблемой. Сейчас многие фермы пустуют. Первое, что нужно попробовать, это вызвать других планеров. Конечно, это надо было делать в воздухе. Оказавшись на земле, зона прямой видимости становится более ограниченной. Но радио все еще может работать в чрезвычайной ситуации. Однажды я услышал самолет Qantas на 122-м.7 направляет наземный экипаж к сбитому планеру. Пилот разослал вызов по номеру 121,5, который отслеживают все авиалайнеры. На помощь пришел водитель Qantas, тоже пилот планера. 121.5 будет лучшим вариантом, чем запуск маяка, который приводит к возникновению всевозможных дорогостоящих вещей.
Оказавшись на земле, зона прямой видимости становится более ограниченной. Но радио все еще может работать в чрезвычайной ситуации. Однажды я услышал самолет Qantas на 122-м.7 направляет наземный экипаж к сбитому планеру. Пилот разослал вызов по номеру 121,5, который отслеживают все авиалайнеры. На помощь пришел водитель Qantas, тоже пилот планера. 121.5 будет лучшим вариантом, чем запуск маяка, который приводит к возникновению всевозможных дорогостоящих вещей.
Вокруг Тьягары много отличных загонов и даже аэродром к югу от Маллумбимби, рядом с полем для гольфа. Частные аэродромы, подобные этому, часто представляют собой просто расчищенные участки земли, иногда с рулежной дорожкой и ветроуказателем.Но будьте осторожны! Рядом есть еще одна бывшая взлетно-посадочная полоса, которая теперь имеет забор посередине. Сами заборы часто трудно заметить с воздуха, но поголовье может касаться травы на разной высоте с каждой стороны проволоки.
Линии электропередач, как и заборы, бывает трудно увидеть. Сами провода практически невидимы. Лучше всего искать линии столбов (или столбов забора). На западе есть печально известные линии SWER (одиночный провод, заземление), и столбы могут быть на расстоянии 500 метров или более друг от друга.К их ужасу, с ними запуталось много сельскохозяйственных тряпок.
Сами провода практически невидимы. Лучше всего искать линии столбов (или столбов забора). На западе есть печально известные линии SWER (одиночный провод, заземление), и столбы могут быть на расстоянии 500 метров или более друг от друга.К их ужасу, с ними запуталось много сельскохозяйственных тряпок.
Если в единственном доступном загоне есть линии электропередач, Ян МакФи предлагает приземлиться над линиями, приняв положение примерно на размах крыльев сбоку от столба электропередач, чтобы обеспечить боковой обзор. Проехав шест, включите полный воздушный тормоз и нырните в загон.
Вокруг Тьягары много длинных зеленых загонов. Некоторые из них, рядом с аэропортом, представляют собой фермы с газоном и более гладкие, чем наша взлетно-посадочная полоса. Хороший выбор. Другие — сахарный тростник.Это крайняя мера, если только недавно не собирали урожай и/или не вспахивали. Приземление на зрелом поле сахарного тростника с урожаем высотой 2 метра, вероятно, повредит самолет и повлечет за собой счет от фермера.
Пляж — это еще и крайняя мера. Если самолет не удастся убрать до наступления прилива, он будет списан. Но это было бы лучше, чем положить его в скраб. По крайней мере, пассажиры не пострадали бы.
Пляж и поля сахарного тростника в стороне, вокруг Тьягары есть много хороших вариантов, нет смысла рисковать, пытаясь вернуться к полю на малой высоте.Безопасная посадка лучше поврежденного самолета в любой день.
Так что же дальше? Все дело в практике. Во время вождения мысленно отмечайте возможные места посадки в этом районе. Находясь в воздухе, следите за оценкой. Обратите внимание на изменение ландшафта, когда вы покидаете равнину вокруг Тьягары. То, что с воздуха выглядит как большие загоны в Federal , оказывается склонами холмов. С высоты 4000 футов вещи выглядят более плоскими.
Конечно, на склоны холмов можно приземлиться. Пылесосы делают это постоянно.Их полосы расположены на холмах по выбору, поэтому они могут приземлиться на холме, загрузиться и взлететь вниз. Техника приземления на склоне заключается в том, чтобы поднять нос и затормозить, как муха, приземляющаяся на стену. Короткий посадочный бросок гарантирован, но не забудьте включить тормоз колеса.
Техника приземления на склоне заключается в том, чтобы поднять нос и затормозить, как муха, приземляющаяся на стену. Короткий посадочный бросок гарантирован, но не забудьте включить тормоз колеса.
ОК. Ни двигателя, ни лифта, ни того и другого. Дела становятся серьезными. Везде есть раковина. На высоте 2000 футов над уровнем моря (НЕ ОБЯЗАТЕЛЬНО над уровнем моря. Пилоты Tyagarah избалованы!) Подходящая площадка для приземления должна быть выбрана как наилучшая из доступных.Если есть целая вереница пшеничных загонов, пригодных для земледелия, можно было бы идти дальше, молясь о спасении. Если над страной тигров, приземлитесь.
Следующие 1000 футов спуска должны быть потрачены на тщательную проверку местности и, надеюсь, на подъем. Лично я, когда спускаюсь на высоту 1000 футов над уровнем земли, беру на себя обязательство приземлиться и сосредоточиться на задаче. Некоторые продолжают попытки термика намного ниже. Я могу чаще выходить за пределы земли, но я никогда не повредил планер, делая это. Я знаю других, которые слишком долго ждали, чтобы сосредоточиться на посадке, и у них были дорогие пранги.
Я знаю других, которые слишком долго ждали, чтобы сосредоточиться на посадке, и у них были дорогие пранги.
Важным фактором является направление ветра. Подсказки — это дым, рябь на плотинах (гладкая вода у стены — это наветренная сторона), ветряные мельницы, летящая пыль и т. д. Лучше всего приземляться против ветра, но иногда рельеф местности или другие соображения делают это невозможным. Посадка по ветру несложна и имеет преимущество положительного сдвига ветра. (Подумайте об этом!) Самая большая проблема заключается в визуальном ощущении очень быстрого движения по земле, которое вызывает рефлекторное действие оттягивания палки назад, чтобы замедлить ее.Не хорошая идея.
Необходимо выполнить нормальный заход на посадку, с подходящей скоростью и НЕ СЛИШКОМ БЛИЗКО К ПАДДОКУ. Новые факторы могут проявиться на финале. Препятствия, камни, кенгуру, овцы и т. д. Приготовьтесь избегать их, если это возможно. (Однажды я сбил овцу, приземляясь в тасманском загоне на своей Cessna 180 с Эртой Китт на борту, но это уже другая история. )
)
Оказавшись на земле, держите крылья ровно, чтобы не зацикливаться на траве или стерне. Если ваш осмотр загона не обнаружил быстро приближающегося забора, не продолжайте катиться.Пилоты-планеристы фактически обезглавлены проволокой. Один из вариантов — ударить по столбу, который должен опустить провода и, таким образом, не дать им прорезать навес. Это может или не может работать.
Ян МакФи предлагает другой подход, который я бы выбрал. Это включает в себя преднамеренное создание петли на планере, толкая ручку полностью вперед, сильно ударяя рулем направления и опуская крыло на землю. Повреждения могут варьироваться от нулевых (планер в любом случае должен быть осмотрен) до списания.НО, моя голова все равно была бы прикреплена.
Это поднимает вопрос о сбоях. Мы все очень боимся повредить или даже поцарапать самолет. Так и должно быть. Но наступает момент, когда жизнь важнее застрахованной машины. В конечном счете планеры заменимы, а люди нет.
Большинство смертельных случаев в авиакатастрофах происходит из-за срыва штопора. Пилот опускается ниже, он инстинктивно тянет ручку назад и, возможно, одновременно пытается развернуться с заносом.Это движения, которые гарантированно производят вертикальный удар о землю.
Пилот опускается ниже, он инстинктивно тянет ручку назад и, возможно, одновременно пытается развернуться с заносом.Это движения, которые гарантированно производят вертикальный удар о землю.
Пионер высшего пилотажа Боб Гувер (http://en.wikipedia.org/wiki/Bob_Hoover) говорит: «Просто приземлите самолет, как обычно, независимо от того, что находится перед вами». Почему? Нормальная посадочная скорость сваливания большинства наших самолетов составляет порядка 35-40 узлов. Любой ветер и скорость у земли будет меньше. Кабина прочно сконструирована для защиты надежно пристегнутых пассажиров. Контролируемая авария в любой момент лучше, чем сваливание.
Раньше мы сидели в ангарах на Аляске, обсуждая лучший способ выжить при посадке в тундре. Обычное приземление обязательно закончилось бы тем, что самолет перевернулся бы на спину. Некоторые выступали за соскальзывание в землю, чтобы крыло смялось и поглотило энергию удара. Я думаю, что лучше бы я был вверх ногами, но главное, как говорится в «Автостопом по Галактике», «НЕ ПАНИКУЙ».