
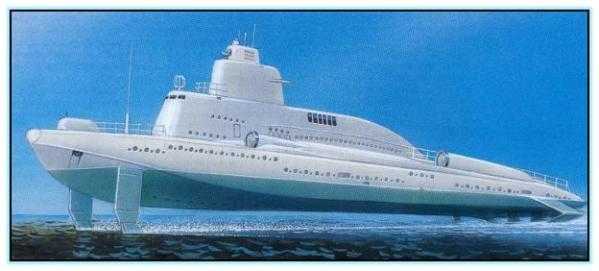
Ракетный катер — подводная лодка проекта 1231 «Дельфин» (СССР. 1959 — 1964 год)
История этого уникального проектного эксперимента восходит к тем временам, когда указания высшего руководства воспринимались как истина в последней инстанции и служили руководством к действию. Именно поэтому столь трудно согласовывавшийся проект продолжал упорно разрабатываться судостроительными конструкторскими бюро и их контрагентами. Идею подал лично Никита Сергеевич Хрущев. Осматривая как-то на военно-морской базе в Балаклаве быстроходные катера проектов ЦКБ-19 и ЦКБ-5 и наблюдая базировавшиеся там же подводные лодки, он высказал мысль, что с целью обеспечения скрытности действий флота, что особенно важно в условиях атомном войны, надо стремиться «погрузить» флот под воду, и предложил для начала «погрузить» под воду ракетный катер …
Разработка проекта 1231 малого погружающегося ракетного корабля была поручена ЦКБ-19 Государственного комитета Совета Министров СССР по судостроению. Главным конструктором назначили начальника бюро Игоря Костецкого. Под разработку проекта ЦКБ-19 был передан Ленинградский Морской завод как опытная и строительная база ЦКБ. Немаловажную роль проект сыграл в организационном объединении конструкторских сил ЦКБ-19 и ЦКБ-5 в одно бюро, впоследствии получившего наименование Центральное морское конструкторское бюро «Алмаз». В связи с объединением двух КБ главным конструктором проекта 1231 стал начальник ЦКБ-5 Евгений Юхнин.
Проектирование столь необычного корабля представляло трудную задачу, о чем свидетельствует как сам ход работ, так и большое количество промежуточных стадий проектирования, закончившихся техническим проектом опытного корабля и макетированием основных помещений. Совмещение противоречивых требований, предъявляемых к надводным кораблям и подводным лодкам, в одном объекте потребовало от проектантов большой изобретательности и значительных усилий. К сказанному следует добавить, что проектирование велось в катерном конструкторском бюро, специалисты которого вынуждены были осваивать и методы проектирования подводных лодок.
Ключевым в проектировании любого военного корабля является предполагаемая тактика его боевого использования. К сожалению, нельзя сказать, что тактика использования погружающегося ракетоносца была изначально всесторонне проработана с учетом возможных действий предполагаемого противника, и что ТТЗ на проектирование ракетоносца было достаточно обоснованным. Более тщательное рассмотрение этой тактики на основе полученных при проектировании технических характеристик, состава и возможностей вооружения показало, что потери кораблей этого проекта в боевых условиях не будут ниже потерь быстроходных ракетных катеров, находившихся в то время на вооружении ВМФ. При этом, ввиду высокой стоимости погружающихся ракетоносцев по сравнению с обычными, военно-экономический эффект от их применения представлялся сомнительным.
В соответствии с ТТЗ корабль проекта 1231 предназначался для нанесения внезапных ракетных ударов по боевым кораблям и транспортам в узкостях, на подходах к военно-морским базам и портам противника, участия в обороне побережья, районов базирования флота и приморских флангов сухопутных войск, в отражении высадки десантов и нарушении морских коммуникаций противника, а также для несения гидроакустического и радиолокационного дозора в местах рассредоточенного базирования флота. Предполагалось, что при решении указанных задач группа подобных кораблей должна была развертываться в заданном районе и длительное время находиться в погруженном положении на позиции ожидания или сближаться с противником также в подводном положении, поддерживая контакт с ним гидроакустическими средствами. Сблизившись, ракетоносцы всплывали, на большой скорости выходили на рубеж ракетного залпа, выпускали ракеты, затем снова погружались или отрывались от противника с максимальной скоростью в надводном положении. Нахождение ракетоносцев в погруженном положении и большая скорость хода при атаке должны были уменьшить время их нахождения под огневым воздействием противника, в том числе средств воздушного нападения.
Для решения поставленной задачи в процессе проектирования корабля рассмотрели большое количество технических решений по всем основным конструктивным узлам. Вооружение было кардинально усилено по отношению к первоначально заданному (2 крылатые ракеты). То же можно сказать о радиолокационных и гидроакустических средствах. Эти меры, по оценкам, вдвое сократили бы потери кораблей этого проекта при решении боевых задач.
Вооружение состояло из четырех крылатых ракет П-25 с дальностью стрельбы 40 км, расположенных в одиночных, ненаводящихся, неамортизированных пусковых установках контейнерного типа, поставленных под постоянным углом наклона к горизонту, с дистанционным управлением с единого пульта, расположенного в центральном посту корабля. Пусковые установки находились вне прочного корпуса и были герметизированы на давление максимальной глубины погружения.

Серийная радиолокационная станция «Рангоут-1231» обеспечивала обнаружение и определение координат цели на дальности 25-28 км. Гидроакустическая станция «Хариус» в подводном положении без хода позволяла обнаруживать противника на расстоянии 60-120 км. Каких-либо средств самообороны, в том числе защиты от воздушного нападения, корабль не имел. Надо отметить, что для эффективного использования корабля дальности действия ракет и РЛС были недостаточны, так же как и эффективность работы ГАС при движении.
Отсутствие средств самообороны значительно повышало вероятность потери кораблей. Эффективность снижалась также малой скоростью и дальностью подводного хода и в режиме РДП (работа дизелей под водой). Кроме того, глубина погружения была явно недостаточной для успешной его защиты от средств ПЛО.
При проектировании корабля неоднократно варьировались общее расположение, число водонепроницаемых отсеков, их геометрические формы (в частности, рассматривались варианты размещения помещений в изолированных контейнерах, сообщение между которыми было возможно только в надводном положении, отсеки в виде горизонтальной «восьмерки» и т.д.). Наконец остановились на двухотсечном варианте в прочном корпусе. В носовом отсеке располагались центральный пост, помещение электроэнергетики, посты радиста и акустика, аккумуляторная яма и агрегаты. Из этого отсека осуществлялось все управление кораблем, двигателями, оружием, радиотехническими средствами и т.д. Во втором отсеке размещались главные и электродвигатели, дизель-генератор, насосы гидравлики и т.д. В надстройке в отдельном прочном контейнере находился жилой отсек со спальными местами на 6 человек, камбузом и запасами воды и провизии. Жилой отсек предусматривалось также использовать для спасения личного состава из подводного положения. При его повреждении спасение было возможно также из центрального поста (спасение предполагалось способом свободного всплытия или по буйрепу). В надстройке располагалась проницаемая ходовая рубка, шахты воздухозабора и газовыхлопа, антенны.
С начала проектирования корабля в качестве основного способа обеспечения высокой скорости хода в надводном положении был принят принцип движения на подводных крыльях. Исследовались различные комбинации подводных крыльев и форм корпуса: от остроскулых глиссирующих до лодочных. Отработка формы корпуса и схемы подводных крыльев проходила испытаниями моделей в опытовом бассейне, на озере и в аэродинамических трубах. Трудоемкий процесс оптимизации гидродинамической компоновки завершился представлением в техническом проекте трех вариантов его технического облика: с двумя подводными крыльями, с одним носовым крылом и вообще без подводных крыльев. Варианты значительно отличались главными размерениями, водоизмещением и скоростями надводного хода. Другие основные технические показатели оказались примерно равными. Наиболее приемлемым для дальнейшей разработки представлялся вариант с одним носовым крылом. Несмотря на меньшую скорость хода, характеристики балансировки и управляемости в подводном положении были лучше, чем у более скоростного варианта с двумя подводными крыльями (особенность крылатых вариантов — осуществление балансировки и управляемости корабля в вертикальной плоскости в подводном положении поворотом всего носового крыла по углу атаки).
В качестве главных двигателей на различных стадиях проекта рассматривались газовые турбины, имеющие большие агрегатные мощности, и дизели различного типа и количества, не требовавшие больших воздухоприемных шахт и обладающие меньшими габаритами.
Принятый для технического проекта дизель М507 представлял собой агрегат из двух серийно освоенных дизелей М504. Для быстрого всплытия корабля предусматривалась возможность продувания цистерн главного балласта выхлопными газами этих двигателей.
При проектировании было выполнено большое количество поисковых проработок с целью изыскания оптимальной схемы передачи мощности к движителям при ходе под водой и в режиме РДП, в том числе с обратимой электрической машиной «генератор-электродвигатель», с третьим валом, угловыми редукторами, гидравлическими передачами, насосами и гидромоторами. Окончательно была выбрана двухвальная установка с дизелями надводного хода и гребными электродвигателями для подводного хода.
Энергетическая установка оказалась весьма сложной и включала большое количество механизмов и устройств. Одних только дополнительных механизмов системы дистанционного автоматического управления насчитывалось около 80 (с соответствующей сетью коммуникаций). Тем не менее, использование автоматического управления позволило, в частности, управлять энергетикой корабля из центрального поста без нахождения личного состава в моторном отделении.
Наружный корпус предусматривался целиком сварным, с использованием прессованных профилей и панелей. Прочный корпус по техническому проекту представлял собой три цилиндрические оболочки. Причем средняя часть корпуса отличалась от правильного цилиндра обычных подводных лодок и являла собой сопряжение нескольких наклонных корпусов.
В качестве материала для наружного и прочного корпусов рассматривались различные алюминиево-магниевые сплавы и высокопрочные стали, для крыльев — титан и сталь. Для корпуса окончательно выбрали сплав АМг-61, для крыльев — титан. Прочный корпус корабля был рассчитан на выдерживание нагрузок при взрыве атомной бомбы в радиусе около 2 км (по ряду других систем и оборудованию — 4 км).
Весьма сложными оказались системы корабля. Так, жизненно важная система погружения и всплытия включала 29 клапанов вентиляции и 54 кингстона. Но запас воздуха высокого давления представлялся недостаточным для всплытия аварийного корабля.
Характеризуя проект в целом, необходимо отметить, что в нем был найден ряд новых технических решений, в частности: комбинированные обводы корпуса для обеспечения ходовых качеств в надводном положении и стабилизации движения в подводном; применение для корпуса алюминиево-магниевого сплава (причем с толщинами до 40 мм), а для крыльев — титана; необычное конструктивное оформление прочного корпуса; использование новых, еще не отработанных дизелей и серебряно-цинковых аккумуляторов; применение в большом объеме автоматики управления кораблем и оборудованием и расположение исполнительных механизмов и отдельных элементов автоматики управления крыльями, рулями, кингстонами и вентиляционными клапанами балластных цистерн вне прочного корпуса; создание облегченной и малогабаритной забортной арматуры.
Наряду с этим пришлось пойти на важные отступления от установившейся практики и норм проектирования в кораблестроении, в том числе на затеснение общего расположения, отсутствие доступа к некоторым важным устройствам, отказ от мероприятий по защите корабля и от резервирования источника электроэнергии, дублирования некоторых элементов энергетической установки и корабельных систем (в том числе приводов систем всплытия и погружения), на перегрузку главных двигателей при выходе корабля на крылья, на ограниченные запасы остойчивости и водоизмещения, и ряд других отступлений.
Водоизмещение 450—600 т
Длина 50,29—63,0 м
Ширина 9,12—8,46 м (по корпусу)
Двигатели Два М-507 (надводный ход), электродвигатели (подводный ход), дизель М-50 (режим РДП и вспомогательный)
Мощность М-507 24 тыс. л. с., М-50 700 л. с.
Движитель широколопастные винты фиксированного шага
Скорость хода 14—38 узлов в зависимости от режима хода (надводное положение), 4 узла в режиме РДП (подводное положение), 4 узла под электродвигателем (подводное положение)
Дальность плавания 105—700 миль в зависимости от режима хода (надводное положение), 200 миль в режиме РДП (подводное положение), 25 миль под электродвигателем (подводное положение)
Автономность плавания 5 суток (надводное положение) и 2 суток (подводное положение)
Экипаж 12 человек (офицеров — 5, мичманов — 4, главных старшин — 3)
Ограничения по размерам и водоизмещению обусловили применение ряда малогабаритных и облегченных образцов механизмов и оборудования, специальных систем и устройств, которые еще не были освоены промышленностью.
Сложность и новизна создания погружающегося ракетоносца и в дальнейшем предопределяла огромный объем проектных и опытно-конструкторских работ, включая исследования гидродинамических характеристик корабля, опытную проверку корпусных и крыльевых конструкций, разработку новых механизмов, арматуры и другого оборудования, стендовую отработку главных двигателей и механизмов передачи, автоматики и систем и т.д. (список выявленных к окончанию техпроекта необходимых работ составлял около 120 позиций).
Углубление процесса проектирования приводило к постоянному возрастанию массы корабля, росту мощности энергоустановки и т.п. Было очевидно, что дальнейшая разработка проекта также будет неизбежно сопровождаться увеличением водоизмещения и, следовательно, уменьшением скорости хода — характеристики, определявшей наряду со скрытностью сам смысл создания корабля.
Проектирование ракетоносца началось в январе 1959 года и продолжалось до конца 1964 года, когда уход Н.С. Хрущева с политической сцены автоматически положил конец работам, которые вряд ли могли привести к реальному успеху, несмотря на всю самоотверженность конструкторов.
Источники : http://www.deepstorm.ru/ , https://ru.wikipedia.org/
raigap.livejournal.com
| Малый погружающийся ракетный корабль проекта 1231 | |
|---|---|
| Основные характеристики | |
| Водоизмещение | 450—600 т |
| Длина | 50,29—63,0 м |
| Ширина | 9,12—8,46 м (по корпусу) |
| Двигатели | Два М-507 (надводный ход), электродвигатели (подводный ход), дизель М-50 (режим РДП и вспомогательный) |
| Мощность | М-507 24 тыс. л. с., М-50 700 л. с. |
| Движитель | широколопастные винты фиксированного шага |
| Скорость хода | 14—38 узлов в зависимости от режима хода (надводное положение), 4 узла в режиме РДП (подводное положение), 4 узла под электродвигателем (подводное положение) |
| Дальность плавания | 105—700 миль в зависимости от режима хода (надводное положение), 200 миль в режиме РДП (подводное положение), 25 миль под электродвигателем (подводное положение) |
| Автономность плавания | 5 суток (надводное положение) и 2 суток (подводное положение) |
| Экипаж | 12 человек (офицеров — 5, мичманов — 4, главных старшин — 3) |
| Вооружение | |
| Навигационное вооружение | гирокомпас, лаг, автопрокладчик курса, эхолот |
| Радиолокационное вооружение | РЛС «Рангоут−1231» |
| Тактическое ударное вооружение | нет |
| Артиллерия | нет |
| Зенитная артиллерия | нет |
| Ракетное вооружение | 2—4 крылатых ракеты П-25 |
| Противолодочное вооружение | нет |
| Минно-торпедное вооружение | нет |
ru-wiki.ru
Катер — подводная лодка (проектный эксперимент) Википедия
| Малый погружающийся ракетный корабль проекта 1231 | |
|---|---|
| Основные характеристики | |
| Водоизмещение | 450—600 т |
| Длина | 50,29—63,0 м |
| Ширина | 9,12—8,46 м (по корпусу) |
| Двигатели | Два М-507 (надводный ход), электродвигатели (подводный ход), дизель М-50 (режим РДП и вспомогательный) |
| Мощность | М-507 24 тыс. л. с., М-50 700 л. с. |
| Движитель | широколопастные винты фиксированного шага |
| Скорость хода | 14—38 узлов в зависимости от режима хода (надводное положение), 4 узла в режиме РДП (подводное положение), 4 узла под электродвигателем (подводное положение) |
| Дальность плавания | 105—700 миль в зависимости от режима хода (надводное положение), 200 миль в режиме РДП (подводное положение), 25 миль под электродвигателем (подводное положение) |
| Автономность плавания | 5 суток (надводное положение) и 2 суток (подводное положение) |
| Экипаж | 12 человек (офицеров — 5, мичманов — 4, главных старшин — 3) |
| Вооружение | |
| Навигационное вооружение | гирокомпас, лаг, автопрокладчик курса, эхолот |
| Радиолокационное вооружение | РЛС «Рангоут−1231» |
| Тактическое ударное вооружение | нет |
| Артиллерия | нет |
| Зенитная артиллерия | нет |
| Ракетное вооружение | 2—4 крылатых ракеты П-25 |
| Противолодочное вооружение | нет |
| Минно-торпедное вооружение | нет |
Малый погружающийся ракетный корабль проекта 1231[1] (другие названия Проект 1231 опытного малого погружающегося ракетного корабля
, проект 1231 «Дельфин», ныряющий катер-ракетоносец, проектный эксперимент: быстроходный катер — подводная лодка) — разрабатывавшийся в 1950—1960-х годах в СССР принципиально новый тип кораблей[к. 1] (ракетоносный гибрид надводного корабля в виде скоростного катера на подводных крыльях и подводной лодки[2][3]), доведённый до высокого уровня проектной проработанности[2]. Автором и инициатором проекта был тогдашний глава СССР Никита Хрущёв[2]. По базовой идее, должен был представлять собой ракетный катер, способный погружаться и перемещаться под водой, что обеспечивало бы бо́льшую скрытность по сравнению с обычными боевыми катерами при бо́льшей, чем у обычных подлодок, скорости надводного хода. Разработка ныряющего катера велась в период с января 1959 года до конца 1964 года (по другим данным проект был официально закрыт постановлением правительства № 227-78 от 27.03.1965 годаПохожие проекты
По версии доктора технических наук Э. А. Афрамеева, впервые идею ныряющего катера высказал Валериан Бжезинский, разработавший в 1939 году в особом техническом бюро НКВД при заводе № 196 в Ленинграде проект погружающегося торпедного катера М-400 «Блоха». В надводном положении катер должен был иметь водоизмещение 35,3 тонны и скорость 33 узла, а в подводном — 74 тонны и 11 узлов соответственно. Вооружение — два 450-мм торпедных аппарата и 1 пулемёт. Энергетическая установка — два дизельных двигателя (в погружённом состоянии переходившие на работу в замкнутом цикле). Тактика — сближение с противником в подводном положении, торпедный залп, всплытие и уход с поля боя в надводном положении. Постройка катера началась в 1939 году на заводе имени Андре Марти. К началу Второй мировой войны катер был готов на 60 %. В условиях блокады 1942 года проект был временно заморожен, а после повреждения катера от артобстрелов окончательно закрыт [6].
Разработка проекта
Ход работ
Разработку проекта вело ленинградское Центральное конструкторское бюро-19 (ЦКБ-19) под руководством начальника бюро Игоря Костецкого. Для реализации проекта под контроль ЦКБ-19 передали Ленинградский Морской завод. Также проект 1231 сыграл немаловажную роль в объединении ЦКБ-19 и ЦКБ-5 в Центральное морское конструкторское бюро «Алмаз». После объединения генеральным конструктором проекта назначили начальника ЦКБ-5 Евгения Юхнина[2].
Проектирование ныряющего катера состояло из большого числа этапов, результатом каждого из них были технические эскизы опытного корабля и макеты основных помещений[2].
Проект осуществляли катерные конструкторские бюро, которые до этого не имели никакого опыта подводного кораблестроения и были вынуждены на ходу осваивать новую для себя область. После первого этапа работ корабль проекта 1231 перешел в разряд опытных для отработки на нём всех проблем и нюансов конструирования
В конце проекта планировалась создание самоходной модели ныряющего катера в масштабе 1:2 или 1:3, на котором предполагалось проверить форму корпуса, процесс всплытия и погружения, систему крыльев, а также маневренность корабля под водой[7].
Проблемы проектирования
Требования для надводного корабля и подводной лодки противоречат друг другу, поэтому совмещение этих требований в рамках одного катера оказалось сложной технической задачей[2].
В ходе работ над проектом 1231 пришлось отойти от принятых в проектном кораблестроении норм и практик: снять ограничения на затеснение общего расположения[к. 2], убрать доступ к некоторым важным устройствам, отказаться от мер по защите корабля, отказаться от резервных источников электроэнергии, убрать дублирование некоторых элементов энергетической установки и корабельных систем (например, приводов систем всплытия и погружения), превысить допустимый лимит по перегрузке главных двигателей при переходе корабля на крылья, ограничить запас остойчивости и водоизмещения. Ограничения по размерам и водоизмещению ныряющего катера вынудили использовать малогабаритные и облегчённые варианты механизмов и оборудования, специальных систем и устройств, которые в тот момент ещё не выпускались массово [8].
Разработка технического проекта выявила необходимость дополнительных проектных и опытно-конструкторских работ, общий список которых составил примерно 120 пунктов. Среди этих пунктов были изучение гидродинамических характеристик корабля, проверка путём опытов корпусных и крыльевых конструкций, создание новых механизмов, арматуры и другого оборудования, стендовые испытания главных двигателей и механической передачи, автоматики и систем
Уникальной частью корабля, которая создала много сложностей при проектировании, являлось устройство поворота носового крыла. Данный механизм должен был выдерживать огромные нагрузки, воздействующие на подводное крыло при движении по поверхности моря во время волнения[9].
Закрытие проекта
Работы над ныряющим катером были прекращены после смещения Хрущёва с поста первого секретаря ЦК КПСС. Впрочем, по мнению Афрамеева, ныряющий катер не имел шансов на практическую реализацию, невзирая на титанические усилия конструкторов[5].
Сфера применения и тактика действия
В 1958 году, ещё до начала основных работ по проекту, ЦКБ-19 провело предварительную оценку возможных тактико-технических параметров ныряющего катера и его вооружения и пришло к выводу, что сфера применения подобного корабля будет достаточно узкой, а некоторые параметры должны быть улучшены (скорость и дальность подводного экономического хода, глубина погружения, малое время погружения и всплытия)[2]
.Оптимальной сферой применения корабля были признаны районы за пределами радиуса действия истребителей берегового базирования, что накладывало необходимость большей дальности автономного передвижения по сравнению с самолётами[2].
Перед ныряющим катером-ракетоносцем были поставлены следующие боевые задачи: нанесение ракетных ударов по кораблям противника в прибрежных районах, помощь в уничтожении десантов и блокировании морских коммуникаций, а также гидроакустический и радиолокационный дозор в условиях рассредоточенного базирования флота[2].
Предполагаемая тактика ныряющего корабля выглядела следующим образом. До начала боевых действий ныряющие корабли заблаговременно прибывают в нужный район, погружаются под воду и в таком положении ждут появления вражеского флота. В случае невозможности подводной засады планировалось сближение с кораблём противника в режиме подводной лодки. В обоих случаях местонахождение вражеского корабля определяется гидроакустическими средствами. После сближения корабль проекта 1231 всплывает на поверхность, развивает высокую надводную скорость, выходит на дистанцию ракетного удара, выпускает ракеты, а затем снова уходит под воду или удаляется от противника в надводном положении. По замыслу создателей, сближение с вражеским кораблём в подводном положении и высокая скорость надводного хода ограничивает время огневого контакта (в частности, с авиацией)
После более детальной проработки тактико-технических характеристик стало ясно, что по степени уязвимости корабль проекта 1231 не превосходит обычные надводные катера, а стоимость его изготовления выше[2].
Конструкция
Общая конструкция
В ходе разработки проекта постоянно менялась общая схема корабля, число водонепроницаемых отсеков, их геометрическая форма. Например, рассматривался вариант отсеков в форме горизонтальной восьмерки или изолированных друг от друга помещений, сообщающихся только в надводном положении. Для проверки размещения всех механизмов, устройств и оборудования на корабле с заданными размерами были изготовлены макеты помещений и отсеков в натуральную величину. Затеснённость отсеков вынудила искать нестандартные решения некоторых вопросов: например, в машинном отделении личный состав был заменён телевизионной камерой, транслирующей информацию на центральный пост управления [11].
В конечном итоге прочный корпус корабля стал состоять из двух отсеков. В носовом отсеке располагались: центральный пост, помещение электроэнергетики, посты радиста и акустика, аккумуляторная яма и агрегаты. Из этого отсека велось всё управление кораблём, движителями и энергетической установкой, ракетами, радиоэлектронным и гидроакустическим оборудованием. Во втором отсеке находились главные и электродвигатели, дизель-генератор, насосы гидравлики и прочее подобное оборудование. В надстройке внутри прочного контейнера находился жилой отсек с койками на 6 человек или 50 % личного состава, а также камбуз с запасами еды и воды. В случае аварийной ситуации экипаж мог покинуть корабль из двух мест: жилого отсека и центрального поста. Покидание корабля планировалось методом свободного всплытия или по буйрепу (тросу с поплавком на поверхности). В надстройке находились проницаемая ходовая рубка, шахты воздухозабора и газовыхлопа, антенны. В ходовой рубке размещался пост управления главными двигателями в режиме надводного хода
Принцип движения и обеспечение остойчивости
Корабль проекта 1231 (вариант с двумя крыльями)Для обеспечения высокой скорости надводного хода были рассмотрены следующие варианты:
Помимо расчётов проводились эксперименты в аэродинамической трубе. При выборе учитывались не только существующие вооружения и механизмы, но и опытные образцы, а также перспективные образцы техники, возможные в будущем. В итоге выяснилось, что корабль на подводных крыльях превосходит остальные варианты по скорости надводного хода и мореходности, но уступает по некоторым маловажным параметрам[12].
Были испробованы разные комбинации подводных крыльев и форм корпуса — от остроскулых глиссирующих и комбинированных форм до лодочных. Выбор конкретного варианта определялся по результатам испытаний моделей в опытном бассейне, на открытом озере и в аэродинамических трубах[13].
При разработке ныряющего катера встала проблема устойчивости и маневрирования корабля в вертикальном направлении под водой. Конструкторы приняли решение придать кормовой оконечности корпуса особую форму, а процесс управления подводными крыльями автоматизировать. Достижение оптимальной гидродинамической компоновки корабля оказалось возможным при трёх вариантах: с двумя подводными крыльями, с одним носовым крылом и без подводных крыльев.
Вариант корабля с двумя крыльями имел водоизмещение в 450 тонн и скорость надводного хода 42 узла, вариант с одним носовым крылом — 440 тонн и 38 узлов, а вариант без крыльев — 600 тонн и 33 узла. Данные варианты отличались друг от друга главными измерениями, водоизмещением и скоростями надводного хода (остальные параметры совпадали). Самым лучшим вариантом являлся корабль с одним носовым крылом. Хотя он и уступал по скорости варианту с двумя подводными крыльями, но полный ход не приводил к перегрузке двигателей, а балансировка и управляемость под водой были лучше. Сохранение устойчивости корабля в вертикальной плоскости под водой осуществлялась поворотом носового крыла по углу атаки, аналогичный способ использовался и при выходе на надводное движение на подводных крыльях. Наличие крыльев увеличивает осадку корабля на стоянках и на малом ходу, усиливает трение и сопротивление воды при движении, а также приводит к увеличению габаритов. Поэтому была попытка сделать подводные крылья убирающимися в корпус при одновременном сохранении возможности их поворота в выдвинутом положении. Но данный эксперимент окончился неудачей[7].
Движители и энергетическая установка
На роль главных двигателей для проекта претендовали газовые турбины (преимущество — большие агрегатные мощности) и дизели разных типов (преимущество — меньшие габариты и отсутствие больших воздухоприемных шахт). Турбины требовали защиты компрессора от попадания морской воды, герметичности воздушных и газовых трактов при погружении, быстрый запуск двигателей после всплытия. Для экономичного режима надводного хода турбины требовали быстроходных винтов регулируемого шага на большую мощность, что, по мнению Афрамеева, представляет затруднение даже в наше время. При равной дальности хода турбинный вариант корабля не давал преимуществ в водоизмещении из-за высокого удельного расхода топлива. В конечном счёте, на проект 1231 установили опытный дизель М507, состоящий из двух агрегатов серийного дизеля М504. Предполагалось выхлопными газами дизельного двигателя продувать цистерны главного балласта в целях быстрого всплытия. В рамках разработки ныряющего катера рассматривался вопрос о создании энергоустановки подводного хода из вспомогательных дизелей на замкнутом цикле работы или о переводе одного из главных дизелей на замкнутый цикл работы на ограниченное время[7].
В качестве движителей использовались широколопастные винты фиксированного шага, характеризующиеся высокой скоростью. Винты регулируемого шага были отвергнуты, хотя они давали максимально возможное количество режимов движения корабля[7].
В ходе работ над ныряющим катером шёл поиск самой оптимальной схемы передачи мощности к движителям в режиме подводного хода и РДП. Среди предложенных вариантов были обратимая электрическая машина «генератор-электродвигатель», использование третьего вала, угловых редукторов, гидравлических передач, насосов и гидромоторов. В итоге была выбрана схема двухвальной установки с дизелями для передвижения по поверхности воды и гребными электродвигателями для подводного хода и в режиме РДП[14].
О сложности энергетической установки корабля свидетельствует тот факт, что она включала в себя 80 исполнительных механизмов системы дистанционного автоматического управления. Но благодаря использованию автоматики отпадала необходимость дежурства личного состава в моторном отделении, а управление энергетической установкой осуществлялось с центрального поста[9].
Корпус
Наружный корпус корабля проекта 1231 планировалось выполнить полностью сварным, с применением прессованных профилей и панелей. Прочный корпус состоял из трёх цилиндрических оболочек. Средняя часть прочного корпуса ныряющего катера представляла собой сопряжение нескольких наклонных корпусов с плоским перекрытием. Перевязка наружного и прочного корпуса должна была выдерживать перегрузки от надводного движения корабля с высокой скоростью. Для наружного и прочного корпуса изучалась возможность использования алюминиево-магниевых сплавов, титановых сплавов и высокопрочных сталей, в том числе маломагнитных. В итоге было принято решение изготавливать корпус из АМг-61 (марка алюминиево-магниевого сплава, применяемая в корпусных нагруженных конструкциях[15]), а крылья — из титана и стали[9].
Для снижения радиолокационной заметности ныряющего катера обсуждалась возможность строительства надводной части наружного корпуса и ограждения рубки из пластических материалов, что не влияло на общую прочность корабля. Сам же прочный корпус должен был выдерживать взрывную волну от взрыва ядерной бомбы на расстоянии от 2 и более километров от эпицентра (а механизмы и устройства — от 4 километров)[9].
Вооружение
Изначально ныряющий катер имел 2 крылатых ракеты, но в ходе проектирования было принято решение усилить ударную мощь. Вооружение корабля в окончательном варианте: 4 крылатых ракеты П-25 с дальностью действия в 40 км. Ракеты располагались в одиночных, ненаводящихся, неавтоматизированных пусковых установках контейнерного типа, закрепленных под постоянным углом наклона к горизонту. Ракеты управлялись дистанционно с общего пульта в центральном посту корабля. Пусковые установки находились вне прочного корпуса и обладали герметичностью, рассчитанной на максимальную глубину погружения корабля. Контейнеры ракет изначально хотели сделать поднимающимися в момент выстрела (в горизонтальном положении они не нарушали бы обтекаемость корабля при подводном движении), но создание подъёмника вызвало дополнительные сложности, поэтому остановились на фиксированном положении ракетных контейнеров[12].
Ныряющий катер не имел никаких средств самообороны (в том числе, и от авиации). Поэтому в качестве защиты предусматривался режим хода в полупогруженном[к. 3] положении, когда над поверхностью моря возвышается только рубка и часть надводного борта, а остальной корабль скрыт под водой[11].
Радиоэлектронное и гидроакустическое оборудование
На корабль проекта 1231 предполагалось установить РЛС общего обнаружения «Рангоут−1231» (улучшенный вариант серийной РЛС), способную обнаружить и определить местонахождение вражеского корабля на расстоянии в 25—28 км. Гидроакустическая станция «Хариус» при нахождении корабля под водой без движения засекала противника на расстоянии 60—120 км. Также планировалось использование телевизионного устройства малых габаритов для наблюдения за воздушным и надводным пространством (при движении на перископной глубине) и подводным пространством (в полностью погруженном положении). Изучалась возможность применения малогабаритной подплывающей антенны, например такой конструкции — на буе-носителе устанавливались штыревая антенна для радиосвязи, телевизионная головка контроля надводного и воздушного пространства и радиолокационная станция засечения самолётных и корабельных РЛС[19].
Оценка проекта
Отсутствие возможности самообороны резко повышало потенциальные потери в случае боевых действий — впрочем, в ходе разработок было усилено ракетное вооружение и улучшено радиолокационное и гидроакустическое обеспечение корабля, что по оценкам вдвое сократило потенциальные потери. Скорость подводного хода и хода в режиме РДП была мала. Дальность подводного хода тоже. Маленькая глубина погружения делала корабль уязвимым для средств противолодочной обороны[19].
Параметры любого боевого корабля определяются предполагаемой сферой его применения. Однако в ситуации с ныряющим катером тактика применения не была проработана в должной степени и плохо учитывала возможные варианты противодействия со стороны противника. В итоге тактико-техническое задание на погружающийся ракетоносец не имело достаточного обоснования[2].
В целом конструкция корабля оказалась довольно сложной. Например, система погружения и всплытия состояла из 29 клапанов вентиляции и 54 кингстонов, однако запаса воздуха высокого давления не хватило бы для всплытия в аварийных условиях[9].
Глиссирующий тип обводов корпуса, дающий высокую скорость надводного хода и хорошую мореходность, и нахождение контейнеров с ракетами на палубе привели к избыточному для подлодки запасу плавучести катера. Этот факт предопределил большой объём цистерн главного балласта и усложнил конструкционные решения процесса погружения и всплытия: в частности, встал вопрос расположения кингстонов. По времени погружения корабль проекта 1231 проигрывал обычным подлодкам[9].
В ходе проектирования ныряющего катера наметилась устойчивая тенденция к увеличению массы корабля и требуемой мощности энергоустановки. Это, в свою очередь, приводило к увеличению водоизмещения и уменьшению скорости, тем самым уменьшая боевую ценность[5].
Результаты проекта
При разработке ныряющего катера были придуманы новые для кораблестроения технические решения. Спроектированы комбинированные обводы корпуса, одновременно обеспечивающие высокую скорость в надводном положении и стабилизацию подводного движения. Для корпуса использовался алюминиево-магниевый сплав толщиной до 40 мм, а для крыльев — титан. Прочный корпус имел нестандартную конструкцию. Использовались непроверенные на практике дизели и серебряно-цинковые аккумуляторы (ещё до постройки подлодок проекта 651). В управлении кораблем и оборудованием применялась массовая автоматизация, предвосхитившая появление подводных лодок проекта 705. Исполнительные механизмы и отдельные элементы автоматики управления крыльями, рулями, кингстонами и вентиляционными клапанами балластных цистерн находились вне прочного корпуса. Был изобретен облегчённый и малогабаритный вариант забортной арматуры[9].
Приложения
Таблица № 1. Основные тактико-технические элементы вариантов различных стадий проектирования корабля проекта 1231[11]
| Тактико-технические элементы | Предэскизная проработка 1958 года | Нулевой этап эскизного проекта 1959 года | Эскизный проект 1959 года | Эскизный проект 1962 года | Инициативный вариант эскизного проекта 1962 года | Нулевой этап технического проекта 1963 года | Технический проект 1963 года |
|---|---|---|---|---|---|---|---|
| Полное водоизмещение, т. | 130 | 170—225 | 270—272 | 316—350 | 350 | 380—423 | 440—460 |
| Скорость надводного хода, узл. | 46—50 | 31—42 | 35—40 | 28—45 | 48 | 42—60 | 33—42 |
| Скорость подводного хода, узл. | 6—7 | 3—5 | 2,5—4 | 4 | 3—4 | 3 | 3,6—4 |
| Дальность надводного хода, миль | 200—250 | 400—500 | 700 | 600—700 | 700 | 400—700 | 700 |
| Дальность подводного хода, миль | 30 | 20 | 12 | 20 | 20 | 20 | 25 |
| Суммарная мощность двигателей надводного хода, л. с. | 12000 | 11000—18000 | 18000 | 18000 | 18200 | 24000—30000 | 24000 |
| Варианты типов ГЭУ надводного хода | турбины | турбины и дизели | дизели | дизели | дизели | турбины и дизели | дизели |
| Варианты гидродинамического комплекса | два подводных крыла | одно подводное крыло | два и три подводных крыла | одно и два подводных крыла | два подводных крыла | два подводных крыла | одно и два подводных крыла; без крыльев |
| Число ракет | 2 | 2 | 2 | 2 | 4 | 4 | 4 |
Таблица № 2. Основные тактико-технические элементы вариантов корабля проекта 1231 по техническому проекту[9]
| Тактико-технические элементы | С двумя крыльями | С одним носовым крылом | Без крыльев |
|---|---|---|---|
| Полное водоизмещение, т. | 450 | 440 | 580—600 |
| Длина наибольшая, м. | 50,29 | 50,69 | 63,0 |
| Ширина корпуса наибольшая, м. | 9,12 | 9,12 | 8,46 |
| Ширина по подводным крыльям, м. | 13,02 | 13,02 | — |
| Скорость надводного хода, узл. | 42 | 38 | 33 |
| Скорость подводного хода, узл. | 4,0 | 3,8—5,0 | 3,6—4,0 |
| Дальность надводного хода, миль (скорость хода, узл.) | 700 (14,5) | 700 (14,5) | 1000 (18) |
| Дальность подводного хода, миль | 25 | ||
| Дальность хода в режиме РДП, миль (скорость хода, узл.) | ок. 200 (4) | ||
| Глубина погружения рабочая, м. | 70 | ||
| Глубина погружения расчетная, м. | 112 | ||
| Время непрерывного пребывания под водой, сутки | 2 | ||
| Автономность, сутки | 5 | ||
| Экипаж, чел. | 12 | ||
| Мореходность при движении на крыльях, баллов | 3 | 4 | — |
| Тип энергоустановки надводного хода | два М-507 мощностью по 12000 л. с. | ||
| Тип энергоустановки подводного хода | электродвигатели и аккумуляторные батареи | ||
| Тип энергоустановки в режиме РДП и вспомогательной | дизель М-50 мощностью 700 л. с. | ||
| Ракетное вооружение | 4 ракеты П-25 с надводным стартом | ||
| Радиотехническое оборудование | радиолокационные и гидроакустические станции | ||
| Штурманское оборудование | гирокомпас, лаг, автопрокладчик курса, эхолот | ||
Примечания
- Комментарии
- Источники
- ↑ ПОСТАНОВЛЕНИЯ (ВЫПИСКИ ИЗ ПОСТАНОВЛЕНИЙ) И РАСПОРЯЖЕНИЯ СОВЕТА МИНИСТРОВ СССР ЗА 1954-1970 ГОДЫ, ХРАНЯЩИЕСЯ В ГАРФ (неопр.). Дата обращения 1 января 2019.
- ↑ 1 2 3 4 5 6 7 8 9 10 11 12 Афрамеев, 1998, с. 22.
- ↑ Саранов В. Секретное оружие XX века. Ныряющий ракетный катер // Тихоокеанская звезда. — 2001.
- ↑ Тихонов С.Г. Оборонные предприятия СССР и России. — ТОМ, 2010. — С. 107.
- ↑ 1 2 3 4 Афрамеев, 1998, с. 28.
- ↑ Э. А. Афрамеев. Ныряющие катера-ракетоносцы // журнал «Военный парад». — 1998. — Вып. 3. — С. 77—81. Архивировано 23 апреля 2007 года.
- ↑ 1 2 3 4 Афрамеев, 1998, с. 26.
- ↑ Афрамеев, 1998, с. 27—28.
- ↑ 1 2 3 4 5 6 7 8 Афрамеев, 1998, с. 27.
- ↑ Афрамеев, 1998, с. 22—24.
- ↑ 1 2 3 4 Афрамеев, 1998, с. 25.
- ↑ 1 2 Афрамеев, 1998, с. 24.
- ↑ Афрамеев, 1998, с. 25—26.
- ↑ Афрамеев, 1998, с. 26—27.
- ↑ Кишкин С. Т. Академия наук СССР. Отделение физико-химии и технологии неорганических материалов Металловедение алюминиевых сплавов. — Наука, 1985. — 237 с.
- ↑ Водобронный миноносец С. К. Джевецкого (1897—1910 гг.)
- ↑ К. Юан, Н.Н. Баженов. Подводный крейсер Сюркуф // Морская Кампания. — ООО «Издательство ВЭРО Пресс», 2009. — Вып. 29. — № 8. Архивировано 29 октября 2013 года.
- ↑ Игорь Муромов. «СЮРКУФ» // 100 великих кораблекрушений.
- ↑ 1 2 Афрамеев, 1998, с. 24—25.
Литература
Ссылки
wikiredia.ru
Ракетный катер — подводная лодка проекта 1231 «Дельфин» (СССР. 1959
История этого уникального проектного эксперимента восходит к тем временам, когда указания высшего руководства воспринимались как истина в последней инстанции и служили руководством к действию. Именно поэтому столь трудно согласовывавшийся проект продолжал упорно разрабатываться судостроительными конструкторскими бюро и их контрагентами. Идею подал лично Никита Сергеевич Хрущев. Осматривая как-то на военно-морской базе в Балаклаве быстроходные катера проектов ЦКБ-19 и ЦКБ-5 и наблюдая базировавшиеся там же подводные лодки, он высказал мысль, что с целью обеспечения скрытности действий флота, что особенно важно в условиях атомном войны, надо стремиться «погрузить» флот под воду, и предложил для начала «погрузить» под воду ракетный катер …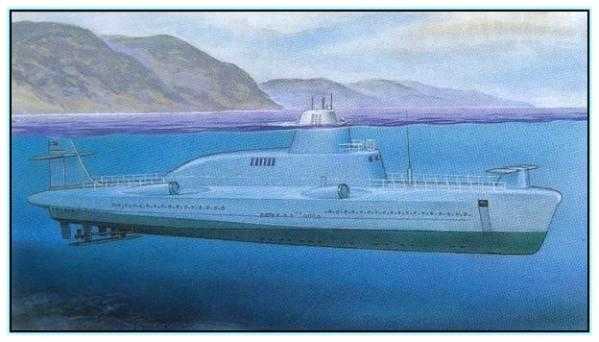
Разработка проекта 1231 малого погружающегося ракетного корабля была поручена ЦКБ-19 Государственного комитета Совета Министров СССР по судостроению. Главным конструктором назначили начальника бюро Игоря Костецкого. Под разработку проекта ЦКБ-19 был передан Ленинградский Морской завод как опытная и строительная база ЦКБ. Немаловажную роль проект сыграл в организационном объединении конструкторских сил ЦКБ-19 и ЦКБ-5 в одно бюро, впоследствии получившего наименование Центральное морское конструкторское бюро «Алмаз». В связи с объединением двух КБ главным конструктором проекта 1231 стал начальник ЦКБ-5 Евгений Юхнин.
Проектирование столь необычного корабля представляло трудную задачу, о чем свидетельствует как сам ход работ, так и большое количество промежуточных стадий проектирования, закончившихся техническим проектом опытного корабля и макетированием основных помещений. Совмещение противоречивых требований, предъявляемых к надводным кораблям и подводным лодкам, в одном объекте потребовало от проектантов большой изобретательности и значительных усилий. К сказанному следует добавить, что проектирование велось в катерном конструкторском бюро, специалисты которого вынуждены были осваивать и методы проектирования подводных лодок.
Ключевым в проектировании любого военного корабля является предполагаемая тактика его боевого использования. К сожалению, нельзя сказать, что тактика использования погружающегося ракетоносца была изначально всесторонне проработана с учетом возможных действий предполагаемого противника, и что ТТЗ на проектирование ракетоносца было достаточно обоснованным. Более тщательное рассмотрение этой тактики на основе полученных при проектировании технических характеристик, состава и возможностей вооружения показало, что потери кораблей этого проекта в боевых условиях не будут ниже потерь быстроходных ракетных катеров, находившихся в то время на вооружении ВМФ. При этом, ввиду высокой стоимости погружающихся ракетоносцев по сравнению с обычными, военно-экономический эффект от их применения представлялся сомнительным.
В соответствии с ТТЗ корабль проекта 1231 предназначался для нанесения внезапных ракетных ударов по боевым кораблям и транспортам в узкостях, на подходах к военно-морским базам и портам противника, участия в обороне побережья, районов базирования флота и приморских флангов сухопутных войск, в отражении высадки десантов и нарушении морских коммуникаций противника, а также для несения гидроакустического и радиолокационного дозора в местах рассредоточенного базирования флота. Предполагалось, что при решении указанных задач группа подобных кораблей должна была развертываться в заданном районе и длительное время находиться в погруженном положении на позиции ожидания или сближаться с противником также в подводном положении, поддерживая контакт с ним гидроакустическими средствами. Сблизившись, ракетоносцы всплывали, на большой скорости выходили на рубеж ракетного залпа, выпускали ракеты, затем снова погружались или отрывались от противника с максимальной скоростью в надводном положении. Нахождение ракетоносцев в погруженном положении и большая скорость хода при атаке должны были уменьшить время их нахождения под огневым воздействием противника, в том числе средств воздушного нападения.
Для решения поставленной задачи в процессе проектирования корабля рассмотрели большое количество технических решений по всем основным конструктивным узлам. Вооружение было кардинально усилено по отношению к первоначально заданному (2 крылатые ракеты). То же можно сказать о радиолокационных и гидроакустических средствах. Эти меры, по оценкам, вдвое сократили бы потери кораблей этого проекта при решении боевых задач.
Вооружение состояло из четырех крылатых ракет П-25 с дальностью стрельбы 40 км, расположенных в одиночных, ненаводящихся, неамортизированных пусковых установках контейнерного типа, поставленных под постоянным углом наклона к горизонту, с дистанционным управлением с единого пульта, расположенного в центральном посту корабля. Пусковые установки находились вне прочного корпуса и были герметизированы на давление максимальной глубины погружения.

Серийная радиолокационная станция «Рангоут-1231» обеспечивала обнаружение и определение координат цели на дальности 25-28 км. Гидроакустическая станция «Хариус» в подводном положении без хода позволяла обнаруживать противника на расстоянии 60-120 км. Каких-либо средств самообороны, в том числе защиты от воздушного нападения, корабль не имел. Надо отметить, что для эффективного использования корабля дальности действия ракет и РЛС были недостаточны, так же как и эффективность работы ГАС при движении.
Отсутствие средств самообороны значительно повышало вероятность потери кораблей. Эффективность снижалась также малой скоростью и дальностью подводного хода и в режиме РДП (работа дизелей под водой). Кроме того, глубина погружения была явно недостаточной для успешной его защиты от средств ПЛО.
При проектировании корабля неоднократно варьировались общее расположение, число водонепроницаемых отсеков, их геометрические формы (в частности, рассматривались варианты размещения помещений в изолированных контейнерах, сообщение между которыми было возможно только в надводном положении, отсеки в виде горизонтальной «восьмерки» и т.д.). Наконец остановились на двухотсечном варианте в прочном корпусе. В носовом отсеке располагались центральный пост, помещение электроэнергетики, посты радиста и акустика, аккумуляторная яма и агрегаты. Из этого отсека осуществлялось все управление кораблем, двигателями, оружием, радиотехническими средствами и т.д. Во втором отсеке размещались главные и электродвигатели, дизель-генератор, насосы гидравлики и т.д. В надстройке в отдельном прочном контейнере находился жилой отсек со спальными местами на 6 человек, камбузом и запасами воды и провизии. Жилой отсек предусматривалось также использовать для спасения личного состава из подводного положения. При его повреждении спасение было возможно также из центрального поста (спасение предполагалось способом свободного всплытия или по буйрепу). В надстройке располагалась проницаемая ходовая рубка, шахты воздухозабора и газовыхлопа, антенны.
С начала проектирования корабля в качестве основного способа обеспечения высокой скорости хода в надводном положении был принят принцип движения на подводных крыльях. Исследовались различные комбинации подводных крыльев и форм корпуса: от остроскулых глиссирующих до лодочных. Отработка формы корпуса и схемы подводных крыльев проходила испытаниями моделей в опытовом бассейне, на озере и в аэродинамических трубах. Трудоемкий процесс оптимизации гидродинамической компоновки завершился представлением в техническом проекте трех вариантов его технического облика: с двумя подводными крыльями, с одним носовым крылом и вообще без подводных крыльев. Варианты значительно отличались главными размерениями, водоизмещением и скоростями надводного хода. Другие основные технические показатели оказались примерно равными. Наиболее приемлемым для дальнейшей разработки представлялся вариант с одним носовым крылом. Несмотря на меньшую скорость хода, характеристики балансировки и управляемости в подводном положении были лучше, чем у более скоростного варианта с двумя подводными крыльями (особенность крылатых вариантов — осуществление балансировки и управляемости корабля в вертикальной плоскости в подводном положении поворотом всего носового крыла по углу атаки).
В качестве главных двигателей на различных стадиях проекта рассматривались газовые турбины, имеющие большие агрегатные мощности, и дизели различного типа и количества, не требовавшие больших воздухоприемных шахт и обладающие меньшими габаритами.
Принятый для технического проекта дизель М507 представлял собой агрегат из двух серийно освоенных дизелей М504. Для быстрого всплытия корабля предусматривалась возможность продувания цистерн главного балласта выхлопными газами этих двигателей.
При проектировании было выполнено большое количество поисковых проработок с целью изыскания оптимальной схемы передачи мощности к движителям при ходе под водой и в режиме РДП, в том числе с обратимой электрической машиной «генератор-электродвигатель», с третьим валом, угловыми редукторами, гидравлическими передачами, насосами и гидромоторами. Окончательно была выбрана двухвальная установка с дизелями надводного хода и гребными электродвигателями для подводного хода.
Энергетическая установка оказалась весьма сложной и включала большое количество механизмов и устройств. Одних только дополнительных механизмов системы дистанционного автоматического управления насчитывалось около 80 (с соответствующей сетью коммуникаций). Тем не менее, использование автоматического управления позволило, в частности, управлять энергетикой корабля из центрального поста без нахождения личного состава в моторном отделении.
Наружный корпус предусматривался целиком сварным, с использованием прессованных профилей и панелей. Прочный корпус по техническому проекту представлял собой три цилиндрические оболочки. Причем средняя часть корпуса отличалась от правильного цилиндра обычных подводных лодок и являла собой сопряжение нескольких наклонных корпусов.
В качестве материала для наружного и прочного корпусов рассматривались различные алюминиево-магниевые сплавы и высокопрочные стали, для крыльев — титан и сталь. Для корпуса окончательно выбрали сплав АМг-61, для крыльев — титан. Прочный корпус корабля был рассчитан на выдерживание нагрузок при взрыве атомной бомбы в радиусе около 2 км (по ряду других систем и оборудованию — 4 км).
Весьма сложными оказались системы корабля. Так, жизненно важная система погружения и всплытия включала 29 клапанов вентиляции и 54 кингстона. Но запас воздуха высокого давления представлялся недостаточным для всплытия аварийного корабля.
Характеризуя проект в целом, необходимо отметить, что в нем был найден ряд новых технических решений, в частности: комбинированные обводы корпуса для обеспечения ходовых качеств в надводном положении и стабилизации движения в подводном; применение для корпуса алюминиево-магниевого сплава (причем с толщинами до 40 мм), а для крыльев — титана; необычное конструктивное оформление прочного корпуса; использование новых, еще не отработанных дизелей и серебряно-цинковых аккумуляторов; применение в большом объеме автоматики управления кораблем и оборудованием и расположение исполнительных механизмов и отдельных элементов автоматики управления крыльями, рулями, кингстонами и вентиляционными клапанами балластных цистерн вне прочного корпуса; создание облегченной и малогабаритной забортной арматуры.
Наряду с этим пришлось пойти на важные отступления от установившейся практики и норм проектирования в кораблестроении, в том числе на затеснение общего расположения, отсутствие доступа к некоторым важным устройствам, отказ от мероприятий по защите корабля и от резервирования источника электроэнергии, дублирования некоторых элементов энергетической установки и корабельных систем (в том числе приводов систем всплытия и погружения), на перегрузку главных двигателей при выходе корабля на крылья, на ограниченные запасы остойчивости и водоизмещения, и ряд других отступлений.

Водоизмещение 450—600 т
Длина 50,29—63,0 м
Ширина 9,12—8,46 м (по корпусу)
Двигатели Два М-507 (надводный ход), электродвигатели (подводный ход), дизель М-50 (режим РДП и вспомогательный)
Мощность М-507 24 тыс. л. с., М-50 700 л. с.
Движитель широколопастные винты фиксированного шага
Скорость хода 14—38 узлов в зависимости от режима хода (надводное положение), 4 узла в режиме РДП (подводное положение), 4 узла под электродвигателем (подводное положение)
Дальность плавания 105—700 миль в зависимости от режима хода (надводное положение), 200 миль в режиме РДП (подводное положение), 25 миль под электродвигателем (подводное положение)
Автономность плавания 5 суток (надводное положение) и 2 суток (подводное положение)
Экипаж 12 человек (офицеров — 5, мичманов — 4, главных старшин — 3)
Ограничения по размерам и водоизмещению обусловили применение ряда малогабаритных и облегченных образцов механизмов и оборудования, специальных систем и устройств, которые еще не были освоены промышленностью.
Сложность и новизна создания погружающегося ракетоносца и в дальнейшем предопределяла огромный объем проектных и опытно-конструкторских работ, включая исследования гидродинамических характеристик корабля, опытную проверку корпусных и крыльевых конструкций, разработку новых механизмов, арматуры и другого оборудования, стендовую отработку главных двигателей и механизмов передачи, автоматики и систем и т.д. (список выявленных к окончанию техпроекта необходимых работ составлял около 120 позиций).
Углубление процесса проектирования приводило к постоянному возрастанию массы корабля, росту мощности энергоустановки и т.п. Было очевидно, что дальнейшая разработка проекта также будет неизбежно сопровождаться увеличением водоизмещения и, следовательно, уменьшением скорости хода — характеристики, определявшей наряду со скрытностью сам смысл создания корабля.
Проектирование ракетоносца началось в январе 1959 года и продолжалось до конца 1964 года, когда уход Н.С. Хрущева с политической сцены автоматически положил конец работам, которые вряд ли могли привести к реальному успеху, несмотря на всю самоотверженность конструкторов.
Источники : http://www.deepstorm.ru/ , https://ru.wikipedia.org/
navy-chf.livejournal.com
| Малый погружающийся ракетный корабль проекта 1231 | |
|---|---|
| Основные характеристики | |
| Водоизмещение | 450—600 т |
| Длина | 50,29—63,0 м |
| Ширина | 9,12—8,46 м (по корпусу) |
| Двигатели | Два М-507 (надводный ход), электродвигатели (подводный ход), дизель М-50 (режим РДП и вспомогательный) |
| Мощность | М-507 24 тыс. л. с., М-50 700 л. с. |
| Движитель | широколопастные винты фиксированного шага |
| Скорость хода | 14—38 узлов в зависимости от режима хода (надводное положение), 4 узла в режиме РДП (подводное положение), 4 узла под электродвигателем (подводное положение) |
| Дальность плавания | 105—700 миль в зависимости от режима хода (надводное положение), 200 миль в режиме РДП (подводное положение), 25 миль под электродвигателем (подводное положение) |
| Автономность плавания | 5 суток (надводное положение) и 2 суток (подводное положение) |
| Экипаж | 12 человек (офицеров — 5, мичманов — 4, главных старшин — 3) |
| Вооружение | |
| Навигационное вооружение | гирокомпас, лаг, автопрокладчик курса, эхолот |
| Радиолокационное вооружение | РЛС «Рангоут−1231» |
| Тактическое ударное вооружение | нет |
| Артиллерия | нет |
| Зенитная артиллерия | нет |
| Ракетное вооружение | 2—4 крылатых ракеты П-25 |
| Противолодочное вооружение | нет |
| Минно-торпедное вооружение | нет |
ru-wiki.ru
Ныряющий фрегат » Военное обозрение
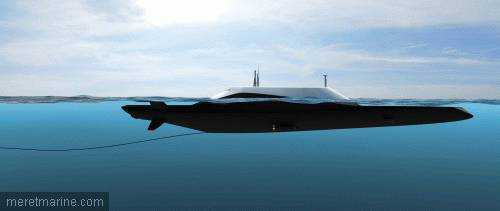
 Военные французские разработчики ошарашили мир новым военным кораблем. Революционное оружие представляет собой «погружаемый фрегат» или, как называют его сами конструкторы, «надводную подлодку».
Военные французские разработчики ошарашили мир новым военным кораблем. Революционное оружие представляет собой «погружаемый фрегат» или, как называют его сами конструкторы, «надводную подлодку».На открывшемся 25 октября в парижском пригороде Ле-Бурже европейском военно-морском салоне EURONAVALE-2010 представлено немало проектов перспективных боевых кораблей ближайшего будущего. Специалисты четко выделяют две тенденции: создание кораблей противоракетной обороны и кораблей, специально спроектированных под базирование беспилотных летательных аппаратов. Среди них есть как обычные надводные корабли, так и весьма футуристические проекты наподобие «погружаемого фрегата» SSX-25, предложенного французским концерном DCNS.
Сами французы называют необычный корабль «надводной подлодкой»: именно так можно перевести на русский язык французское название Sous-marin de surface. Корабль длиной 109 метров имеет полупогруженный подводный корпус, оптимизированный для высоких ходов в надводном положении. Для этого в удлиненном ножевидном корпусе корабля установлены особо мощные газовые турбины, приводящие в движение три водометных движителя, при этом «надводная подлодка» сможет пройти 38-узловым ходом не менее 2000 морских миль.
Турбины и дизели подводного хода расположены на едином основании в массивной палубной надстройке. По прибытии в район боевых действий корабль совершает «нырок», частично превращаясь в субмарину.
При этом воздухозаборники турбин и выхлопные устройства закрываются специальными заслонками, из надстройки выдвигаются «шнорхели» (устройства подводного питания дизелей воздухом), из центральной части корабля – азиподы, а в носу – рули глубины. В погруженном состоянии водоизмещение корабля составляет 4800 тонн, он способен передвигаться со скоростью до 10 узлов.
Для наблюдения за поверхностью при этом может использоваться специальная выдвижная мачта наподобие перископа, снабженная радаром и разного рода оптическими датчиками.

Компания не сообщает, способен ли корабль действовать в полностью погруженном состоянии, то есть без выдвижных устройств для забора атмосферного воздуха, только на электрическом ходу. Компания подчеркивает, что их ныряющий корабль для борьбы с подводными целями не оптимизирован, тем не менее он имеет для самообороны восемь торпед в носовых торпедных аппаратах.
Основное вооружение корабля – 16 универсальных вертикальных пусковых установок для размещения как крылатых (включая противокорабельные), так и зенитных ракет.
Таким образом, в качестве перспективного корабля французские конструкторы предлагают некий гибрид фрегата УРО (высокая скорость, мореходность, мощный ракетный комплекс) и ударной подводной лодки (скрытность, способность атаковать цели из подводного положения). Погруженный корпус обеспечит гибридному кораблю меньшую уязвимость от качки, сделав его стабильной пусковой платформой, а развитая надстройка позволит частично избавиться от такого недостатка ПЛ, как теснота. Более того, погруженный корпус – это еще и меньшая заметность во всех диапазонах и высокая экономичность за счет меньшего сопротивления ходу на границе сред.
Кроме того, как отмечают специалисты, развитая надстройка позволяет размещать в ней различные достаточно комфортные помещения для спецназа и его специфического оборудования – преимущество, которого лишены ПЛ спецназначения. В надстройке, безусловно, может быть устроен и специальный ангар для БПЛА (беспилотный летательный аппарат), особенно привлекательны в этом плане винтокрылые машины с вертикальным взлетом. Такие вертолеты-роботы можно хранить в автоматизированных стеллажах по сторонам ангара с раздвижной крышей, которая будет открываться для выпуска и приема БПЛА.

Очевидно, что в такой конфигурации корабль следует рассматривать, прежде всего, как разведчик, предназначенный для скрытного и длительного сбора информации в любом прибрежном районе, по тем или иным причинам не доступном для космической или авиационной разведки. Другое возможное назначение подобного корабля – расчистка плацдарма для коммандос, скрытные удары по береговым объектам, расчистка пляжей перед прибытием основных десантных сил. Понятно, что наиболее ценен он будет против противника, не располагающего современными средствами противолодочной борьбы.
Не следует думать, что французы изобрели нечто принципиально новое. Ныряющие и полупогружные субмарины известны с позапрошлого века, некоторые такие корабли даже применялись в бою. Так, английские эскадренные лодки класса К времен Первой мировой, оснащенные (из-за отсутствия мощных дизелей) паротурбинными установками, фактически были ныряющими кораблями и в боестолкновениях действовали из полупогруженного положения, надеясь на защиту корпуса толщей воды. Полупогружным судном вполне можно считать и знаменитый «Монитор»: первый самоходный железный винтовой артиллеристский корабль, примененный северянами во время Гражданской войны в США для обстрела Хемплтонского рейда.
Можно припомнить так же германские мини-субмарины типа «Зеехунде» и «Зеетойфель»: первые являли собой попытку создания некоего морского аналога одноместного самолета-истребителя, а вторые – диверсионного судна с возможностью выхода на берег с помощью гусениц.
Различные проекты ныряющих кораблей создавались и в СССР. Таковыми фактически были ранние советские ПЛ типа «Правда». Для достижения большой надводной скорости конструктор Андрей Асафов постарался придать ПЛ обводы эскадренного миноносца – наиболее быстроходного в то время из надводных кораблей. Но для миноносцев характерно отношение длины к ширине и ширины к осадке абсолютно не свойственное ПЛ. В результате в погруженном состоянии корабль плохо управлялся, а высокий запас плавучести крайне замедлял погружение.
Крайне оригинальным выглядел и проект ныряющего торпедного катера 1231 «Дельфин». Идею подал лично Никита Сергеевич Хрущев. Осматривая как-то на военно-морской базе в Балаклаве быстроходные катера проектов ЦКБ-19 и ЦКБ-5 и наблюдая базировавшиеся там же подводные лодки, он высказал мысль, что с целью обеспечения скрытности действий флота, что особенно важно в условиях атомной войны, надо стремиться «погрузить» флот под воду, и предложил для начала «погрузить» ракетный катер.
В соответствии с ТТЗ корабль проекта 1231 предназначался для нанесения внезапных ракетных ударов по боевым кораблям и транспорту в узких местах, на подходах к военно-морским базам и портам противника, участия в обороне побережья, районов базирования флота и приморских флангов сухопутных войск, в отражении высадки десантов и нарушении морских коммуникаций противника, а также для несения гидроакустического и радиолокационного дозора в местах рассредоточенного базирования флота. Предполагалось, что при решении указанных задач группа подобных кораблей должна была развертываться в заданном районе и длительное время находиться в погруженном положении на позиции ожидания или сближаться с противником также в подводном положении, поддерживая контакт с ним гидроакустическими средствами.
Сблизившись, ракетоносцы всплывали, на большой скорости выходили на рубеж ракетного залпа, выпускали ракеты, затем снова погружались или отрывались от противника с максимальной скоростью в надводном положении. Нахождение ракетоносцев в погруженном положении и большая скорость хода при атаке должны были уменьшить время их нахождения под огневым воздействием противника, в том числе средств воздушного нападения.
Проект довольно успешно развивался с 1959 года до отставки Хрущева в 1964 году, когда был заморожен и позже закрыт

Единственное применение, в котором ныряющие корабли себя оправдали, – это скоростные полупогружаемые десантные катера, используемые, например, северокорейскими диверсантами, а с некоторых пор и их иранскими коллегами. Такого же типа суда, но уже «самодельные» используют и колумбийские наркоторговцы для доставки своего товара в США. Это низкосидящие лодки длиной до 25 метров, надводная часть лодок выступает над поверхностью на высоту не более 45 сантиметров, они могут брать на борт до 10 тонн кокаина. Американские военные и правоохранительные органы называют их самоходными полупогружными лодками, Self-Propelled Semi-Submersibles (SPSS). Обнаружение таких суденышек крайне затруднено даже для столь хорошо оснащенной службы, как американская Береговая охрана.
Видимо, этим и руководствуются и французские конструкторы: какие-нибудь сомалийские пираты большой полупогружной или ныряющий корабль, скорее всего, действительно не заметят. Но вот стоит ли овчинка выделки? Не получится ли так, что корабль такого класса окажется дороже, чем фрегат и подлодка вместе взятые, а по эффективности – хуже, чем каждый по отдельности? Понятно, что в настоящий момент никто не сможет ответить на этот вопрос, но все-таки кажется, что будущее за менее экзотическими кораблями.
topwar.ru
10 самых эксклюзивных частных подводных лодок
Среди дорогостоящих «игрушек» эксцентричных миллионеров теперь можно увидеть не только шикарные автомобили, гигантские особняки и виллы, первоклассные частные самолёты и поражающие воображение корабли, но и личные подводные лодки
Источник перевод для mixstuff – MakD
Среди дорогостоящих «игрушек» эксцентричных миллионеров теперь можно увидеть не только шикарные автомобили, гигантские особняки и виллы, первоклассные частные самолёты и поражающие воображение корабли, но и личные подводные лодки!

Оснащённые всеми удобствами, отвечающими последнему слову техники, эксклюзивные субмарины позволяют своим владельцам не только совершать подводные прогулки по морским глубинам, но и проводить головокружительные вечеринки или вести тайные переговоры. Итак, давайте узнаем, что же скрывают самые современные и дорогие подлодки в мире:
10. Частная подводная лодка «Nautilus VAS» – $2,7 миллионов

Эта роскошная субмарина «военного образца» вмещает до 8 человек, способна погружаться на глубину до 2,000 метров и может оставаться под водой в течение 4 дней. Подлодка оборудована шлюзовым отсеком, позволяющим дайверам покидать борт и осматривать глубоководное пространство. В «Nautilus VAS» также имеется гальюн, лестница, минибар, цифровое телевидение и стереосистема.
9. Подводная лодка «Тритон 3300/3» – $3 миллиона

Трёхместная субмарина «Тритон» размером 4 метра в длину и 3 метра в ширину способна опускаться на глубину до 1,000 метров. Подводная лодка в форме пузыря отлично подходит для морских прогулок и научной работы, так как из прозрачной акриловой капсулы открывается панорамный вид на подводный мир. Для освещения тёмных подводных глубин «Тритон» использует мощные светодиодные фары.
За 3 миллиона долларов вы приобретёте не просто комфортное подводное судно: в стоимость также входит четырёхнедельное обучение по её управлению и обслуживанию. Знаменитый канал «Дискавери» использовал «Тритоны» для съёмок документального фильма о легендарном ужасе морей – гигантском кальмаре.
8. Катер для подводного плавания «Marion Hyper-Sub» – $3,5 миллионов

Этот глубоководный аппарат является нечто средним между подводной лодкой и катером. На воде он может развивать максимальную скорость до 40 узлов при максимальной дальности плавания в 920 километров, а также оснащён дизельным двигателем в 440 лошадиных сил. Используя самозаряжающуюся электрическую/гидравлическую систему погружения, судно может опускаться на глубину до 76 метров. Объёмы катера позволяют размещать в нём небольшой экипаж в составе 5 человек, который получит в своё распоряжение кожаные сидения и деревянную обшивку.
Изобретатель лодки Рейнольдс Мэрион заявил, что созданный им опытный образец пригоден как для проведения морских исследований и прогулок, так и для военных целей.
7. Подводная лодка «Nomad 1000» – $6,5 миллионов

«Nomad 1000» – это автономная подводная лодка, которая способна держаться на поверхности (с помощью мощных дизельных двигателей) одну минуту, а затем исчезнуть под водой в течение следующей. Субмарина способна покрыть до 1,000 морских миль (1850 километров) и оставаться под водой в течение 10 дней.
С полутораметровых акриловых смотровых окон открывается впечатляющий вид на морские просторы. Лёжа на двуспальных кроватях, пассажиры имеют возможность наслаждаться «подводным кино», а 1000-ваттные кварцевые галогенные подводные фары будут разгонять мрак. На палубах подлодки, рассчитанных на 30 пассажиров, расположены каюты с ванной комнатой, а также просторные гостиные со столовой.
6. «Подводный автобус» «Proteus» – $8 миллионов

Бывший французский морской пехотинец Эрве Жобер, возглавляющий в ОАЭ компанию «Эксамос» по производству частных подлодок класса «люкс», сконструировал «подводный автобус» под названием «Proteus», вмещающий 14 пассажиров, совмещающий в себе функции роскошной яхты. Такой 19-метровый аппарат выглядит как «подводный лимузин» с широкими диванами, панорамными окнами и джакузи. На нём вполне можно устраивать крутые вечеринки или проводить секретные переговоры.
5. Батискаф «Deepsea Challenger» – $ 8 миллионов

Сняв два кассовых блокбастера и завоевав Голливуд, режиссёр Джеймс Кэмерон на этом не успокаивается и решает покорить океан. Славящийся своей любовью ко всему масштабному и дорогому в 2012 году он в одиночку достигает дна Марианской впадины – самой глубокой точки Земли. Такое путешествие стало реальностью благодаря специально разработанному одноместному батискафу под названием «Deepsea Challenger», оснащённому специальным оборудованием для фото- и видеосъёмки под водой. Устройство весом 11 тонн и длиной более 7 метров было разработано и построено по заказу Джеймса Кэмерона в течение 8 лет в Австралии.
Это стало вторым пилотируемым погружением в «Бездну Челленджера» в истории, а также первым одиночным и самым длительным из всех. Спуск в Марианский желоб занял 2 часа 36 минут; на 11-километровой глубине Кэмерон пробыл около 3 часов. В ходе погружения режиссёр снимал видео в 3D, которое затем смонтировал в документальный фильм.
4. Субмарина «Yellow Submarine» – $12 миллионов

Эта «Жёлтая субмарина» – собственность одного из основателей компании Microsoft Пола Аллена. 12-метровое судно может оставаться под водой в течение недели. Большой любитель морских и подводных путешествий, предприниматель утверждал, что обнаружил на дне обломки судов, потерпевших кораблекрушение. Он также является владельцем яхты под названием «Осьминог» стоимостью $200 миллионов, в которой могут вместиться два вертолёта, семь лодок и экипаж из 60 человек. А её недельное обслуживание обходится Аллену в $384 тысячи.
3. Субмарина «Seattle 1000» – $25 миллионов

«Seattle 1000» – это огромное судно длиной 36 метров и высотой с трёхэтажное здание, которое может оставаться под водой в течение 20 дней. Дальность её плавания составляет 3,000 морских миль (5,550 километров), а это означает, что на подлодке можно отправиться в трансатлантическое путешествие. Мегаглубинная субмарина также может похвастаться 5 каютами, 5 ванными комнатами, 2 тренажёрными залами, винным погребом, кухней, акриловой палубой для отдыха пассажиров, кормовым отсеком для ныряльщиков. Иллюминаторы большой гостиной достигают 2,5 метра в диаметре. Пожалуй, данную субмарину можно назвать одной из самых роскошных в мире.
2. Частная подводная лодка «Phoenix 1000» – $80 миллионов

По внутреннему убранству «Phoenix 1000» сравним с суперяхтой, в технологическом же плане превосходит её, поскольку является одновременно и яхтой, и подводной лодкой. 65-метровое судно имеет 10 спален, несколько спортзалов, винный погреб, джакузи и многие другие удобства. «Яхта» способна погружаться на глубину до 300 метров, а интегрированная в её корпус мини-субмарина – на все 600 метров. Также мини-субмарина может доставлять пассажиров с поверхности на подводную лодку, находящуюся на глубине, и обратно.
Из-за обширного внутреннего пространства площадью более 460 квадратных метра этого морского гиганта называют крупнейшей в мире субмариной класса «люкс».
1. Яхта-субмарина «Migaloo» – $2,3 миллиарда

Да, вы не ошиблись. Это современное роскошное приватное судно является одним из самых дорогих транспортных средств и самой дорогой лодкой в мире.
«Migaloo» сочетает в себе функции субмарины и яхты, хотя судно больше похоже на «плавающий город». Длина белого гибрида составляет рекордные 115 метров, а своё название он получил в честь белого горбатого кита-альбиноса. На кормовой части палубы расположен трёхметровый бассейн и посадочная площадка для вертолёта. Всё это закрывается специальными механизмами перед погружение гибрида в воду. Среди других удобств следует упомянуть двухуровневые каюты, кинотеатр, Vip-люксы, библиотеку, тренажёрный зал, игровую комнату, прачечную, приватные комнаты отдыха, лифты, доставляющие пассажиров на разные уровни палуб.
Главный эксклюзив этого плавучего сооружения – в его способности «нырять» на глубину в 240 метров, чего не удавалось сделать ни одной суперяхте в мире. К сожалению, шестипалубная «Migaloo» пока ещё не бороздит просторы морей и океанов, а находится в стадии строительства.
mixstuff.ru