
Основы радиолокации — Импульсный радиолокатор
Импульсный радиолокатор

Рисунок 1. Измерение времени запаздывания в радиолокаторе
transmitted energie
echo signal
Рисунок 1. Измерение времени запаздывания в радиолокаторе


Рисунок 1. Измерение времени запаздывания в радиолокаторе
Импульсный радиолокатор
зондирующий импульс
отраженный сигнал
τ
Τ
Рисунок 2. Параметры импульсов в радиолокаторе
зондирующий импульс
отраженный сигнал
τ
Τ
Рисунок 2. Параметры импульсов в радиолокаторе
Импульсный радиолокатор — это радиолокационное устройство, которое излучает короткие мощные импульсы, а между ними (во время так называемого интервала покоя) принимает эхо-сигналы. В отличие от радиолокатора непрерывного излучения, передатчик импульсного радиолокатора выключен до момента окончания измерения. Характерной особенностью этого метода является то, что зондирующие импульсы имеют очень малую длительность (обычно их длительность составляет τ ≈ 0,1 … 1 мкс). Между зондирующими импульсами имеются очень продолжительные паузы Τ >> τ, которые называют интервалами приема (обычно Т ≈ 1 мс), как показано на Рисунке 2. Дальности до отражающих объектов определяют путем измерения времени запаздывания эхо-сигнала, как показано на Рисунке 1 (для стационарных радиолокаторов) или сравнением характерных изменений допплеровского спектра эхо-сигнала со значениями для заданных дальностей, хранящимися в базе данных (для радиолокаторов, расположенных на быстро движущихся платформах). Импульсные радиолокаторы, как правило, разрабатываются для больших дальностей целей и излучают сравнительно высокую импульсную мощность.
Важной отличительной особенностью по сравнению с другими методами радиолокации является необходимость синхронизации во времени всех процессов, происходящих в импульсном радиолокаторе. Передний фронт излучаемого импульса определяет начало отсчета для измерения запаздывания эхо-сигнала. Концом интервала запаздывания является момент достижения нарастающим фронтом эхо-сигнала своей вершины. Задержки, возникающие при обработке сигнала, являются систематическими и должны учитываться при расчете дальности цели. Случайные отклонения времени запаздывания влияют на точность импульсного радиолокатора.
Зондирующий сигнал
Форма зондирующего сигнала может быть математически описана следующим выражением:
| s(t) = A(t)· sin[2πf(t)·t + φ(t)] | (1) |

Рисунок 3. Частотный спектр последовательности прямоугольных импульсов вблизи несущей частоты ftx

Рисунок 3. Частотный спектр последовательности прямоугольных импульсов вблизи несущей частоты ftx
Функция A(t) описывает изменение амплитуды в зависимости от времени t, например, амплитудную модуляцию. В простейшем случае передатчик включается на короткое время (длительностью τ), а в остальное время остается в «выключенном» состоянии. Поэтому A(t) = 1 во время излучения импульса и A(t) = 0 в остальное время. Зависимость от времени определяется частотой повторения импульсов и коэффициентом заполнения. Поскольку радиолокационные отклики испытывают разнообразные, не поддающиеся точному учету, потери, действительная амплитудная модуляция не несет особого смысла, за исключением переключающей функции (включение / выключение). Огибающая частотного спектра периодической последовательности импульсов описывается функцией вида (sin x)/x (Рисунок 3), которую иногда называют арочным синусом. Основная часть излучаемой мощности (обратите внимание на логарифмический масштаб оси ординат) находится в интервале частот B HF = 2/τ в окрестности несущей частоты сигнала ftx.
Частота повторения импульсов fPRF, длительность зондирующего импульса τ и длительность интервала приема (Τ − τ) определяют показатели качества радиолокатора, например, минимальную дальность действия (зондирующий импульс должен полностью покинуть антенну) и максимальная однозначно измеряемая дальность (эхо-сигнал должен быть принят до момента излучения следующего зондирующего импульса). Длительность зондирующего импульса τ в основном определяет разрешающую способность по дальности ΔR импульсного радиолокатора, которая описывается выражением:
Чем короче зондирующий сигнал, тем ближе друг к другу могут находиться два отражателя, которые тем не менее будут обнаруживаться как два отдельных объекта, а не как один протяженный объект. Ширина спектра BHF зондирующего сигнала увеличивается по мере уменьшения длительности импульса:
В случае простой модуляции импульса уменьшение его длительности ограничивает максимальную дальность действия радиолокатора. В этих условиях энергия зондирующего сигнала Ep может быть увеличена только за счет импульсной мощности PS при заданном разрешении по дальности. Для максимальной дальности определяющим фактором является энергия импульса, а не импульсная мощность:
| Ep = Ps· τ = Pav· Τ = | Pav | где | Ep = энергия импульса; PS = излучаемая импульсная мощность; Pav = средняя мощность (за период зондирования). | (4) |
| fPRF |
Значительное улучшение в такой ситуации может быть достигнуто за счет внутренней модуляции зондирующего импульса (внутриимпульсной модуляции). Соотношение между длительностью зондирующего импульса и длительностью импульса на выходе приемника определяется сжатием импульсов в приемнике. Измерение координат нескольких отражателей, в том числе определение дальности до каждого из них, может быть выполнено в течение длительности зондирующего импульса.
Функция φ(t) в выражении (1) описывает фазовый сдвиг всего сигнала. Радиолокатор, в котором начальная фаза зондирующего сигнала известна или может быть вычислена, называют полностью когерентным. Если же известно текущее значение фазы, но начальное ее значение не известно, то радиолокатор относят к одному из видов псевдокогерентных радиолокаторов. Если начальная фаза полностью неизвестна (меняется хаотически), радиолокатор является некогерентным. Функция φ(t) приобретает большое значение для случаев внутриимпульсной модуляции с кодированием (манипуляцией) фазы.
Эхо-сигнал (отраженный сигнал)
Обычно предполагают, что длительность зондирующего импульса и длительность отраженного эхо-сигнала равны. Поэтому при расчетах, где фигурируют излучаемая мощность и мощность принятого сигнала (что имеет место в фундаментальном уравнении радиолокации), длительность этих сигналов можно опустить.
- B спектре:
- могут возникать дополнительные гармоники на несущей частоте;
- на несущую частоту могут быть наложены одна или несколько допплеровских частот.
- Может изменяться направление поляризации.
- Длительность эхо-сигнала не является постоянной и может существенно увеличиваться за счет интерференции сигналов, отраженных близко расположенными элементами цели (следовательно, имеющими отличия во времени запаздывания).
В итоге эхо-сигнал подвергается такому большому количеству влияний, что его форма рассматривается как неизвестная. Тем не менее, оптимальные согласованные приемники или согласованные фильтры создаются путем использования нескольких параллельных каналов, учитывающих возможные деформации сигнала. Эти устройства обеспечивают максимально возможное отношение «сигнал — (шум + помеха)» (В англоязычных источниках: Signal to Noise Plus Interference Ratio, SNIR). С их выхода сигнал поступает на дальнейшую обработку. При этом запоминается момент (положение на оси времени) максимального превышения сигналом шума как важный параметр, идентифицирующий этот сигнал среди сигналов, принятых от других целей.
В общем случае ширина полосы приемника выбирается как можно более узкой для снижения уровня принимаемых нежелательных шумовых и помеховых колебаний.
В случае использования простого радиоимпульса ширина полосы приемника определяется соотношением B
Построение, структурная схема
Синхронизатор
Модулятор
Передатчик
Антенный переключатель
Антенна
Приемник
Индикатор
Рисунок 4. Структурная схема моностатического импульсного радиолокатора
Рисунок 4. Структурная схема моностатического импульсного радиолокатора (интерактивный рисунок)Конструкция импульсного радиолокатора зависит от того находятся ли передатчик и приемник в одном месте (совмещенный, моностатический радиолокатор) или оба эти компонента размещены в совершенно разных местах (многопозиционный, бистатический радиолокатор).
Совмещенный импульсный радиолокатор, в дополнении к компактной конструкции, обладает тем преимуществом, что важные для импульсного радиолокатора устройства синхронизации могут быть сосредоточены в центральном блоке синхронизации. Таким образом, внутренние задержки на переключающих устройствах могут быть малыми. Сложная и дорогая антенна радиолокатора за счет применения антенного переключателя может использоваться как для излучения, так и для приема сигналов.
Недостатком является необходимость отключения высокочувствительного приемника при помощи антенного переключателя на время излучения зондирующего сигнала во избежание выхода его из строя под воздействием большой мощности передатчика. В течение этого времени прием сигналов невозможен.
Описание блоков на блок-схеме:
В бистатическом импульсном радиолокаторе приемник имеет собственную антенну, находящуюся на удалении от передатчика. Этим определяется преимущество, заключающееся в отсутствии необходимости сложных мер защиты приемника от высокой мощности передатчика. В простейшем случае сеть строится путем дополнения существующего моностатического радиолокатора новыми приемными пунктами. Пример: метеорологический радиолокатор Poldirad в Оберпфаффенгофене (Oberpfaffenhofen), Германия (недалеко от Мюнхена). Приемные антенны не являются остронаправленными: они должны обеспечивать прием с нескольких направлений одновременно. Недостатком здесь является очень сложная синхронизация. Одновременно с эхо-сигналами приемник должен принимать и прямой сигнал от передатчика. По этому сигналу и известному расстоянию до передатчика может быть сформирован сигнал синхронизации. Основным применение бистатической схемы в военном деле являются загоризонтные радиолокаторы.
Пассивные радиолокаторы являются разновидностью бистатических радиолокаторов. В них используются различные высокочастотные излучения (радио- или телевещание, импульсные радиолокаторы). В пассивных радиолокаторах положение цели рассчитывается на основе разницы между временем прихода прямого сигнала и дополнительным временем запаздывания отраженного сигнала. Неоднозначность измерения устраняется путем непосредственного определения направления на цель по ее побочным излучениям или путем синхронизации двух пассивных радиолокаторов, расположенных в разных местах.
Применение
Импульсные радиолокаторы разработаны, в основном, для больших расстояний до целей. Основным их применением все еще остается военная сфера. Другими применениями являются управление воздушным движением, наблюдение за погодой (особенно осадками), а также спутниковое дистанционное зондирование Земли.
Радиолокатор — это… Что такое Радиолокатор?
Радиолокационная станция (РЛС) или рада́р (англ. radar от Radio Detection and Ranging — радиообнаружение и дальнометрия) — система для обнаружения воздушных, морских и наземных объектов, а также для определения их дальности и геометрических параметров. Использует метод, основанный на излучении радиоволн и регистрации их отражений от объектов. Английский термин-акроним появился в 1941 г., впоследствии в его написании прописные буквы были заменены строчными.
История
В 1887 году немецкий физик Генрих Герц начал эксперименты, в ходе которых он открыл существование электромагнитных волн, предсказанных теорией Джеймса Максвелла. Герц научился генерировать и улавливать электромагнитные радиоволны и обнаружил, что они по-разному поглощаются и отражаются различными материалами.
Одно из первых устройств, предназначенных для радиолокации воздушных объектов продемонстрировал 26 февраля 1935 г. шотландский физик Роберт Ватсон-Ватт, который примерно за год до этого получил первый патент на изобретение подобной системы.
Россия
В Советском Союзе осознание необходимости средств обнаружения авиации, свободных от недостатков звукового и оптического наблюдения, привела к разворачиванию исследований в области радиолокации. Идея, предложенная молодым артиллеристом Павлом Ощепковым получила одобрение высшего командования: наркома обороны СССР К. Е. Ворошилова и его заместителя — М. Н. Тухачевского.
3 января 1934 года в СССР был успешно проведён эксперимент по обнаружению самолёта радиолокационным методом. Самолёт, летящий на высоте 150 метров был обнаружен на дальности 600 метров от радарной установки. Эксперимент был организован представителями Ленинградского Института Электротехники и Центральной Радиолаборатории. В 1934 году маршал Тухачевский в письме правительству СССР написал: «Опыты по обнаружению самолётов с помощью электромагнитного луча подтвердили правильность положенного в основу принципа». Первая опытная установка «Рапид» была опробована в том же же году[1][2], в 1936 году советская сантиметровая радиолокационная станция «Буря» засекала самолёт с расстояния 10 километров[1][3]. В США первый контракт военных с промышленностью был заключён в 1939 году. В 1946 году американские специалисты — Реймонд и Хачертон, бывший сотрудник посольства США в Москве, написали: «Советские учёные успешно разработали теорию радара за несколько лет до того, как радар был изобретён в Англии».[4]
Классификация радаров
По предназначению радиолокационные станции можно классифицировать следующим образом:
- РЛС обнаружения;
- РЛС управления и слежения;
- Панорамные РЛС;
- РЛС бокового обзора;
- Метеорологические РЛС.
По сфере применения различают военные и гражданские РЛС.
По характеру носителя:
- Наземные РЛС
- Морские РЛС
- Бортовые РЛС
По типу действия
- Первичные или пассивные
- Вторичные или активные
- Совмещённые
По диапазону волн:
- Метровые
- Сантиметровые
- Миллиметровые
Устройство и принцип действия Первичного радиолокатора
Первичный (пассивный) радиолокатор, в основном, служит для обнаружения целей, освещая их электромагнитной волной и затем принимая отражения (эхо) этой волны от цели. Поскольку скорость электромагнитных волн постоянна (скорость света), становится возможным определить расстояние до цели, основываясь на измерении времени распространения сигнала.
В основе устройства радиолокационной станции лежат три компонента: передатчик, антенна и приёмник.
Передающее устройство является источником электромагнитного сигнала высокой мощности. Он может представлять из себя мощный импульсный генератор. Для импульсных РЛС сантиметрового диапазона — обычно магнетрон или импульсный генератор работающий по схеме: задающий генератор — мощный усилитель, использующий в качестве генератора чаще всего лампу бегущей волны, а для РЛС метрового диапазона, часто используют — триодную лампу. В зависимости от конструкции, передатчик работает либо в импульсном режиме, формируя повторяющиеся короткие мощные электромагнитные импульсы, либо излучает непрерывный электромагнитный сигнал.
Антенна выполняет фокусировку сигнала приёмника и формирование диаграммы направленности, а также приём отражённого от цели сигнала и передачу этого сигнала в приёмник. В зависимости от реализации приём отражённого сигнала может осуществляться либо той же самой антенной, либо другой, которая иногда может располагаться на значительном расстоянии от передающего устройства. В случае, если передача и приём совмещены в одной антенне, эти два действия выполняются поочерёдно, а чтобы мощный сигнал, просачивающийся от передающего передатчика в приёмник не ослепил приёмник слабого эха, перед приёмником размещают специальное устройство, закрывающее вход приёмника в момент излучения зондирующего сигнала.
Приёмное устройство выполняет усиление и обработку принятого сигнала. В самом простом случае результирующий сигнал подаётся на лучевую трубку (экран), которая показывает изображение, синхронизированное с движением антенны.
Когерентные РЛС
Когерентный метод радиолокации основан на выделении и анализе разности фаз отправленного и отражённого сигналов, которая возникает из-за эффекта Доплера, когда сигнал отражается от движущегося объекта. При этом передающее устройство может работать как непрерывно, так и в импульсном режиме. Основным преимуществом данного метода является то, что он «позволяет наблюдать только движущиеся объекты, а это исключает помехи от неподвижных предметов, расположенных между приёмной аппаратурой и целью или за ней.»[5]
Импульсные РЛС

Принцип действия импульсного радара
Принцип определения расстояния до объекта с помощью импульсного радара
Современные радары сопровождения построены как импульсные радары. Импульсный радар передаёт только в течение очень краткого времени, короткий импульс обычно приблизительно микросекунда в продолжительности, после чего он слушает эхо, в то время как импульс распространяется.
Поскольку импульс уходит далеко от радара с постоянной скоростью, время прошедшее с момента, когда импульс посылали, ко времени когда эхо получено, — ясная мера прямого расстояния до цели. Следующий импульс можно послать только через некоторое время, а именно после того как импульс придёт обратно, это зависит от дальности обнаружения радара (данным мощностью передатчика, усилением антенны и чувствительностью приёмника). Если бы импульс посылали раньше, то эхо предыдущего импульса от отдалённой цели могло бы быть перепутано с эхом второго импульса от близкой цели.
Промежуток времени между импульсами называют интервалом повторения импульса, обратная к нему величина — важный параметр, который называют частотой повторения импульса (ЧПИ) . Радары низкой частоты дальнего обзора, обычно имеют интервал повторения в несколько сотен импульсов в секунду (или Герц [Гц]). Частота повторения импульсов является одним из отличительных признаков, по которым возможно дистанционное определение модели РЛС.
Устранение пассивных помех
Одной из основных проблем импульсных РЛС является избавление от сигнала, отражающегося от неподвижных объектов: земной поверхности, высоких холмов и т. п. Если к примеру, самолёт находится на фоне высокого холма, отражённый сигнал от этого холма полностью перекроет сигнал от самолёта. Для наземных РЛС эта проблема проявляется при работе с низколетящими объектами. Для бортовых импульсных РЛС она выражается в том, что отражение от земной поверхности затеняет все объекты, лежащие ниже самолёта с радиолокатором.
Методы устранения помех используют, так или иначе, эффект Доплера (частота волны, отражённой от приближающегося объекта, увеличивается, от уходящего объекта — уменьшается).
Самый простой радар, который может обнаружить цель в помехах — радар с селекцией движущихся целей (СДЦ) — импульсный радар, который сравнивает отражения более чем от двух или больше интервалов повторения импульса. Любая цель, которая, движется относительно радара, производит изменение в параметре сигнала (стадия в последовательном СДЦ), тогда как помехи остаются неизменными. Устранение помех происходит путём вычитания отражений из двух последовательных интервалов. На практике устранение помех может быть осуществлено в специальных устройствах — черезпериодных компенсаторах или алгоритмами в программном обеспечении.
СДЦ, работающие с постоянной частотой повторения импульсов, имеют фундаментальную слабость: они являются слепыми к целям со специфическими круговыми скоростями (которые производят изменения фаз точно в 360 градусов), и такие цели не отображаются. Скорость, при которой цель исчезает для радиолокатора, зависит от рабочей частоты станции и от частоты повторения импульсов. Современные СДЦ излучают несколько импульсов с различной частоты повторения — такой, что невидимые скорости в каждой частоте повторения импульсов охвачены другими ЧПИ.
Другой способ избавления от помех реализован в импульсно-доплеровских РЛС, которые используют существенно более сложную обработку чем РЛС с СДЦ.
Важное свойство импульсно-доплеровских РЛС — это когерентность сигнала. Это значит, что посланные сигналы и отражения должны иметь определённую фазовую зависимость.
Импульсно-доплеровские РЛС обычно считаются лучше РЛС с СДЦ при обнаружении низколетящих целей во множественных помехах земли, это — предпочтительная техника, используемая в современном истребителе, для воздушного перехвата/управления огнём, примеры тому AN/APG-63, 65, 66, 67 и 70 радары. В современном доплеровском радаре большинство обработки выполняется отдельным процессором в цифровом виде с помощью цифровых сигнальных процессоров, обычно используя высокопроизводительный алгоритм Быстрое преобразование Фурье для преобразования цифровых данных образцов отражений кое во что более управляемое другими алгоритмами. Цифровые обработчики сигналов очень гибки и используемые алгоритмы могут обычно быстро заменяться другими, заменяя только память (ПЗУ) чипы, таким образом быстро противодействуя техники глушения противника если необходимо.
Устройство и принцип действия Вторичного радиолокатора
Принцип действия вторичного радиолокатора несколько отличается, от принципа Первичной радиолокации. В основе устройства Вторичной радиолокационной станции лежат компоненты: передатчик, антенна, генераторы азимутальных меток, приёмник, сигнальный процессор, индикатор и самолётный ответчик с антенной.
Передатчик. Служит для излучения импульсов запроса в антенну на частоте 1030 МГц
Антенна. Служит для излучения и приёма отражённого сигнала. По стандартам ICAO для вторичной радиолокации, антенна излучает на частоте 1030МГц, и принимает на частоте 1090 МГц.
Генераторы Азимутальных меток. Служат для генерации Азимутальных меток (Azimuth Change Pulse или ACP) и генерации Метки Севера (Azimuth Reference Pulse или ARP). За один оборот антенны РЛС генерируется 4096 малых азимутальных меток(для старых систем), или 16384 Малых азимутальных меток (для новых систем), их ещё называет улучшенные малые азимутальные метки (Improved Azimuth Change pulse или IACP), а также одну метку Севера. Метка севера приходит с генератора азимутальных меток, при таком положении антенны, когда она направлена на Север, а малые азимутальные метки служат для отсчёта угла разворота антенны.
Приёмник. Служит для приёма импульсов на частоте 1090 МГц
Сигнальный процессор. Служит для обработки принятых сигналов
Индикатор Служит для индикации обработанной информации
Самолётный ответчик с антенной Служит для передачи импульсного радиосигнала, содержащего дополнительную информацию, обратно в сторону РЛС при получении радиосигнала запроса.
Принцип Действия Принцип действия вторичного радиолокатора заключается в использовании энергии самолётного ответчика, для определения положения Воздушного судна. РЛС облучает окружающее пространства запросными импульсами на частоте P1 и P3, а также импульсом подавления P2 на частоте 1030 МГц. Воздушные суда оборудованные ответчиками находящиеся в зоне действия луча запроса при получении запросных импульсов, если действует условие P1,P3>P2 отвечают запросившей РЛС, Серией кодированных импульсов на частоте 1090 МГц, в которых содержится дополнительная информация типа Номер борта, Высота и так далее. Ответ самолётного ответчика зависит от режима запроса РЛС, а режим запроса определяется растоянием между запросными импульсами P1 и P3 например в режиме запроса А (mode A), расстояние между запросными импульсами станции P1 и P3 равно 8 микросекунд, и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свой номер борта. В режиме запроса C (mode C) расстояние между запросными импульсами станции равно 21 микросекунде и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свою высоту. Также РЛС может посылать запрос в смешанном режиме, например Режим А, Режим С, Режим А, Режим С. Азимут Воздушного судна определяется, углом поворота антенны, который в свою очередь определяется путём подсчёта Малых Азимутальных меток. Дальность определяется, по задержке пришедшего ответа Если Воздушное судно не лежит в зоне действия основного луча, а лежит в зоне действия боковых лепестков, или находится сзади антенны, то ответчик Воздушного судна при получении запроса от РЛС, получит на своём входе условие, что импульсы P1,P3<P2, то есть импульс подавления больше импульсов запроса. Учитываю этот фактор ответчик запирается и не отвечает на запрос. Принятый от ответчика сигнал принимается и обрабатывается приёмником РЛС, затем поступает на сигнальный процессор, который проводит обработку сигналов, и выдачу информации конечному потребителю, и или на контрольный индикатор.
Плюсы вторичной РЛС, более высокая точность, дополнительная информация о Воздушном Судне (Номер борта, Высота), а также малое по сравнению с Первичными РЛС излучение.
См. также
Другие страницы
Литература и сноски
- ↑ 1 2 Поляков В. Т. «Посвящение в радиоэлектронику», М., РиС, ISBN 5-256-00077-2
- ↑ передатчик был установлен на крыше дома 14 по Красноказарменной улице, Москва, приёмник — в районе посёлка Новогиреево; присутствовали М. Н. Тухачевский, Н.Н.Нагорный, М. В. Шулейкин. Аппаратуру демонстрировал П. К. Ощепков.
- ↑ Испытания в Евпатории, группа Б. К. Шембеля
- ↑ http://www.young-science.ru/index.php?option=com_content&task=view&id=215&Itemid=66
- ↑ Шембель Б. К. У истоков радиолокации в СССР. — Советское радио, 1977, № 5, с. 15-17.
Wikimedia Foundation. 2010.
2. Импульсно — допплеровская рлс
Для лучшего понимания принципа действия таких РЛС целесообразно рассмотреть особенности фильтрации когерентной пачки на радиочастоте. На рис. 50,а показан спектр бесконечной последовательности зондирующих импульсов, полученной вырезкой из опорного синусоидального напряжения, рис. 50,б — амплитудно-частотный спектр пачки импульсов, отражённых от приближающейся цели при сканирующей антенне РЛС, рис. 50,в — спектральная плотность мощности смеси пассивной помехи и внутриприёмного шума. Кривая получена в результате сдвига спектральной плотности излучённого сигнала на величину средней допплеровской поправки помехи Fдп и размытия спектральных линий вследствие разброса скоростей отражателей, а также за счёт смены отражателей при сканировании и наложения спектральной плотности внутриприёмного шума. На рис. 50,г представлена амплитудно-частотная характеристика оптимального фильтра. Зоны прозрачности фильтра соответствуют гребням спектра отражённого сигнала, зоны наибольшего подавления — гребням спектра помехи.
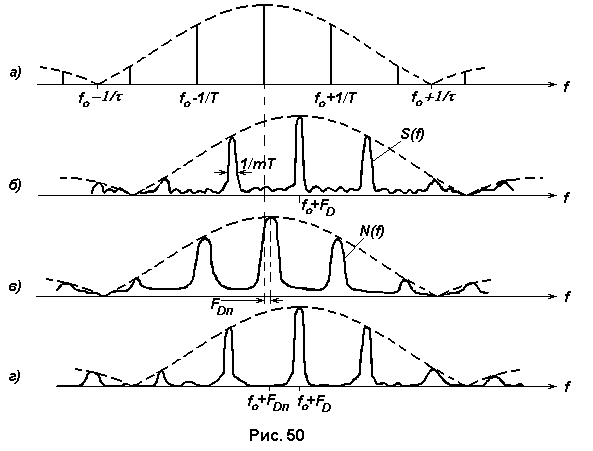
Анализ рис. 50 показывает, что чем больше расстояние между гребнями и чем ýже сами гребни спектра помехи, тем лучше условие для подавления пассивной помехи и выделения сигнала. Расстояние между гребнями спектра равно 1/Т, т.е. определяется периодом повторения РЛС. Период повторения обычно выбирается исходя из условия однозначного измерения дальностиТ>2Rmax/с. Для обзорных РЛС он велик и составляет, например, приR=150 км,Т=1 мс. Расстояние между гребнями спектров в этом случае равноF=1/T=1 кГц. При длительности импульса РЛСТ=1 мкс и периоде повторения Т=1 мс в пределах огибающей главного лепестка спектра сигнала укладывается 2Т/ =2000 гребней спектра сигнала. На рис. 50 число гребней в области главного лепестка уменьшено и равно пяти, поскольку большое число гребней трудно изобразить графически.
Расстояние между гребнями спектра сигнала не может быть увеличено без нарушения условия однозначного измерения дальности. Ширина гребней спектра помехи примерно на порядок меньше чем расстояние между ними, что говорит о существовании условий для выделения движущихся целей. Гребни спектра сигнала будут часто находиться между гребнями помехи, т.е. на участках спектральной оси, свободных от пассивной помехи. Эти условия выполняются для наземных РЛС при обнаружении объектов на фоне отражений от земной и морской поверхностей.
В
бортовых РЛС гребни спектра пассивной
помехи значительно расширяются за счёт
движения носителя. Покажем это на
примере. Для бортовой РЛС угол наклона
луча 0 обычно
мал (рис. 51,а). Угломестные размеры
разрешаемого элемента поверхности
(рис. 51,а) значительно меньше ширины
диаграммы направленности  ,
поэтому по углу места разрешаемый
элемент поверхности является точечным
отражателем.
,
поэтому по углу места разрешаемый
элемент поверхности является точечным
отражателем.
В азимутальной плоскости луч РЛС отклонён от направления движения на угол 0 (рис. 51,б). Угловые размеры разрешаемого элемента в азимутальной плоскости равны ширине луча антенны . Так как луч является достаточно широким, то отражатели разрешаемого элемента поверхности имеют разные углы по отношению к вектору скорости V в азимутальной плоскости.
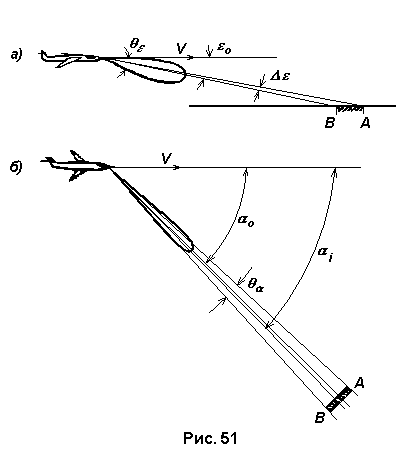
Для элементарного отражателя, расположенного под углом по отношению к вектору скорости, допплеровская поправка будет определяться проекцией вектора скорости на это направление (пр. Vi)
 ,
(32)
,
(32)
cos0 учитывает наклон луча в вертикальной плоскости.
Отражатель А (рис. 51,б) имеет наименьший угол по отношению к вектору скорости А =0 — /2, соответствующее ему допплеровское смещение будет максимальным
 .
(33)
.
(33)
Отражатель В (рис. 51,б) имеет наибольший угол по отношению к вектору скорости, соответствующее ему допплеровское смещение будет минимальным
 ,
(34)
,
(34)
Величина
fп =Fд max — Fд min (35)
характеризует расширение гребней спектральной плотности пассивной помехи за счёт движения носителя.
импульсно-доплеровская+рлс+с+селекцией+по+дальности — с английского на все языки
Все языкиАбхазскийАдыгейскийАфрикаансАйнский языкАканАлтайскийАрагонскийАрабскийАстурийскийАймараАзербайджанскийБашкирскийБагобоБелорусскийБолгарскийТибетскийБурятскийКаталанскийЧеченскийШорскийЧерокиШайенскогоКриЧешскийКрымскотатарскийЦерковнославянский (Старославянский)ЧувашскийВаллийскийДатскийНемецкийДолганскийГреческийАнглийскийЭсперантоИспанскийЭстонскийБаскскийЭвенкийскийПерсидскийФинскийФарерскийФранцузскийИрландскийГэльскийГуараниКлингонскийЭльзасскийИвритХиндиХорватскийВерхнелужицкийГаитянскийВенгерскийАрмянскийИндонезийскийИнупиакИнгушскийИсландскийИтальянскийЯпонскийГрузинскийКарачаевскийЧеркесскийКазахскийКхмерскийКорейскийКумыкскийКурдскийКомиКиргизскийЛатинскийЛюксембургскийСефардскийЛингалаЛитовскийЛатышскийМаньчжурскийМикенскийМокшанскийМаориМарийскийМакедонскийКомиМонгольскийМалайскийМайяЭрзянскийНидерландскийНорвежскийНауатльОрокскийНогайскийОсетинскийОсманскийПенджабскийПалиПольскийПапьяментоДревнерусский языкПортугальскийКечуаКвеньяРумынский, МолдавскийАрумынскийРусскийСанскритСеверносаамскийЯкутскийСловацкийСловенскийАлбанскийСербскийШведскийСуахилиШумерскийСилезскийТофаларскийТаджикскийТайскийТуркменскийТагальскийТурецкийТатарскийТувинскийТвиУдмурдскийУйгурскийУкраинскийУрдуУрумскийУзбекскийВьетнамскийВепсскийВарайскийЮпийскийИдишЙорубаКитайский
Все языкиРусскийПерсидскийИспанскийИвритНемецкийНорвежскийИтальянскийСуахилиКазахскийНидерландскийХорватскийДатскийУкраинскийКитайскийКаталанскийАлбанскийКурдскийИндонезийскийВьетнамскийМаориТагальскийУрдуИсландскийВенгерскийХиндиИрландскийФарерскийПортугальскийФранцузскийБолгарскийТурецкийСловенскийПольскийАрабскийЛитовскийМонгольскийТайскийПалиМакедонскийКорейскийЛатышскийГрузинскийШведскийРумынский, МолдавскийЯпонскийЧешскийФинскийСербскийСловацкийГаитянскийАрмянскийЭстонскийГреческийАнглийскийЛатинскийДревнерусский языкЦерковнославянский (Старославянский)АзербайджанскийТамильскийКвеньяАфрикаансПапьяментоМокшанскийЙорубаЭрзянскийМарийскийЧувашскийУдмурдскийТатарскийУйгурскийМалайскийМальтийскийЧерокиЧаморроКлингонскийБаскский
импульсно-доплеровская+рлс+с+нагружённым+циклом+работы — с английского на русский
Все языкиАбхазскийАдыгейскийАфрикаансАйнский языкАканАлтайскийАрагонскийАрабскийАстурийскийАймараАзербайджанскийБашкирскийБагобоБелорусскийБолгарскийТибетскийБурятскийКаталанскийЧеченскийШорскийЧерокиШайенскогоКриЧешскийКрымскотатарскийЦерковнославянский (Старославянский)ЧувашскийВаллийскийДатскийНемецкийДолганскийГреческийАнглийскийЭсперантоИспанскийЭстонскийБаскскийЭвенкийскийПерсидскийФинскийФарерскийФранцузскийИрландскийГэльскийГуараниКлингонскийЭльзасскийИвритХиндиХорватскийВерхнелужицкийГаитянскийВенгерскийАрмянскийИндонезийскийИнупиакИнгушскийИсландскийИтальянскийЯпонскийГрузинскийКарачаевскийЧеркесскийКазахскийКхмерскийКорейскийКумыкскийКурдскийКомиКиргизскийЛатинскийЛюксембургскийСефардскийЛингалаЛитовскийЛатышскийМаньчжурскийМикенскийМокшанскийМаориМарийскийМакедонскийКомиМонгольскийМалайскийМайяЭрзянскийНидерландскийНорвежскийНауатльОрокскийНогайскийОсетинскийОсманскийПенджабскийПалиПольскийПапьяментоДревнерусский языкПортугальскийКечуаКвеньяРумынский, МолдавскийАрумынскийРусскийСанскритСеверносаамскийЯкутскийСловацкийСловенскийАлбанскийСербскийШведскийСуахилиШумерскийСилезскийТофаларскийТаджикскийТайскийТуркменскийТагальскийТурецкийТатарскийТувинскийТвиУдмурдскийУйгурскийУкраинскийУрдуУрумскийУзбекскийВьетнамскийВепсскийВарайскийЮпийскийИдишЙорубаКитайский
Все языкиРусскийПерсидскийИспанскийИвритНемецкийНорвежскийИтальянскийСуахилиКазахскийНидерландскийХорватскийДатскийУкраинскийКитайскийКаталанскийАлбанскийКурдскийИндонезийскийВьетнамскийМаориТагальскийУрдуИсландскийВенгерскийХиндиИрландскийФарерскийПортугальскийФранцузскийБолгарскийТурецкийСловенскийПольскийАрабскийЛитовскийМонгольскийТайскийПалиМакедонскийКорейскийЛатышскийГрузинскийШведскийРумынский, МолдавскийЯпонскийЧешскийФинскийСербскийСловацкийГаитянскийАрмянскийЭстонскийГреческийАнглийскийЛатинскийДревнерусский языкЦерковнославянский (Старославянский)АзербайджанскийТамильскийКвеньяАфрикаансПапьяментоМокшанскийЙорубаЭрзянскийМарийскийЧувашскийУдмурдскийТатарскийУйгурскийМалайскийМальтийскийЧерокиЧаморроКлингонскийБаскский
подвижная+импульсно-доплеровская+рлс — с английского на русский
Все языкиАбхазскийАдыгейскийАфрикаансАйнский языкАканАлтайскийАрагонскийАрабскийАстурийскийАймараАзербайджанскийБашкирскийБагобоБелорусскийБолгарскийТибетскийБурятскийКаталанскийЧеченскийШорскийЧерокиШайенскогоКриЧешскийКрымскотатарскийЦерковнославянский (Старославянский)ЧувашскийВаллийскийДатскийНемецкийДолганскийГреческийАнглийскийЭсперантоИспанскийЭстонскийБаскскийЭвенкийскийПерсидскийФинскийФарерскийФранцузскийИрландскийГэльскийГуараниКлингонскийЭльзасскийИвритХиндиХорватскийВерхнелужицкийГаитянскийВенгерскийАрмянскийИндонезийскийИнупиакИнгушскийИсландскийИтальянскийЯпонскийГрузинскийКарачаевскийЧеркесскийКазахскийКхмерскийКорейскийКумыкскийКурдскийКомиКиргизскийЛатинскийЛюксембургскийСефардскийЛингалаЛитовскийЛатышскийМаньчжурскийМикенскийМокшанскийМаориМарийскийМакедонскийКомиМонгольскийМалайскийМайяЭрзянскийНидерландскийНорвежскийНауатльОрокскийНогайскийОсетинскийОсманскийПенджабскийПалиПольскийПапьяментоДревнерусский языкПортугальскийКечуаКвеньяРумынский, МолдавскийАрумынскийРусскийСанскритСеверносаамскийЯкутскийСловацкийСловенскийАлбанскийСербскийШведскийСуахилиШумерскийСилезскийТофаларскийТаджикскийТайскийТуркменскийТагальскийТурецкийТатарскийТувинскийТвиУдмурдскийУйгурскийУкраинскийУрдуУрумскийУзбекскийВьетнамскийВепсскийВарайскийЮпийскийИдишЙорубаКитайский
Все языкиРусскийПерсидскийИспанскийИвритНемецкийНорвежскийИтальянскийСуахилиКазахскийНидерландскийХорватскийДатскийУкраинскийКитайскийКаталанскийАлбанскийКурдскийИндонезийскийВьетнамскийМаориТагальскийУрдуИсландскийВенгерскийХиндиИрландскийФарерскийПортугальскийФранцузскийБолгарскийТурецкийСловенскийПольскийАрабскийЛитовскийМонгольскийТайскийПалиМакедонскийКорейскийЛатышскийГрузинскийШведскийРумынский, МолдавскийЯпонскийЧешскийФинскийСербскийСловацкийГаитянскийАрмянскийЭстонскийГреческийАнглийскийЛатинскийДревнерусский языкЦерковнославянский (Старославянский)АзербайджанскийТамильскийКвеньяАфрикаансПапьяментоМокшанскийЙорубаЭрзянскийМарийскийЧувашскийУдмурдскийТатарскийУйгурскийМалайскийМальтийскийЧерокиЧаморроКлингонскийБаскский
обработки сигналов импульсно-доплеровских — Pulse-Doppler signal processing
Обработка сигналов импульсно-доплеровские является РЛС и CEUs стратегии повышения производительности , что позволяет небольшие объекты высокоскоростных быть обнаружены в непосредственной близости от крупных медленно двигающихся объектов. Улучшения обнаружения по порядку 1000000: 1 являются общими. Небольшие быстро движущиеся объекты могут быть идентифицированы близко к местности, вблизи поверхности моря, так и внутри штормов.
Эта стратегия обработки сигналов используется в импульсно-доплеровского радиолокатора и многорежимный радар, который затем может быть направлен в области , содержащие большое количество медленно движущихся отражателей без подавляющего компьютерного программного обеспечения и операторов. Другие стратегии обработки сигналов, как и двигающиеся цели , являются более подходящими для мягких прозрачных сред голубого неба.
Он также используется для измерения кровотока в допплерографии .
Среда
 обработки сигналов импульсно-доплеровские начинаются с образцами, взятых между несколькими импульсами передачи. Стратегия Образец расширен для одного передаваемого импульса показана.
обработки сигналов импульсно-доплеровские начинаются с образцами, взятых между несколькими импульсами передачи. Стратегия Образец расширен для одного передаваемого импульса показана.Импульсно-доплеровский начинается с когерентными импульсами, передаваемых через антенну или датчик.
Там нет модуляции на передающем импульсе. Каждый импульс представляет собой совершенно чистый срез идеального когерентного тона. Когерентный тон производится гетеродином.
Там может быть множество передающих импульсов между антенной и рефлектором. В агрессивной среде, может быть миллионами других отражений от медленного движения или стационарных объектов.
Передают импульсы посылаются на частоте повторения импульсов .
Энергия импульсов передач распространяется в пространстве , пока они не разрушали отражатели. Это нарушение вызывает некоторое количество энергии , передаваемой будут отражаться обратно к радиолокационной антенне или преобразователю, наряду с фазовой модуляцией , вызванным движением. Же тон , который используется для генерации импульсов передающих также используется для понижающего преобразования принятых сигналов в полосе частот модулирующих сигналов .
Отраженная энергия, которая была вниз преобразуется в сигнал основной полосы оцифровывается.
Отбор проб начинается после того, как каждая передающая импульс гаснет. Это в состоянии покоя фаза передатчика.
Фаза покоя делится на равноудаленные интервалы выборки. Образцы собирают до тех пор, пока радар начинает стрелять другую передачу импульс.
Ширина импульса каждого образца соответствует длительности импульса передачи импульса.
Достаточно образцы должны быть приняты, чтобы выступать в качестве ввода в импульсно-доплеровского фильтра.
отбор проб
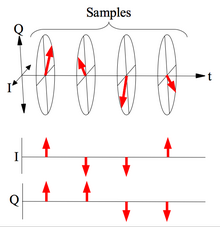 обработки сигналов импульсно-доплеровский начинается с I и Q выборок.
обработки сигналов импульсно-доплеровский начинается с I и Q выборок.Локальный генератор разделен на два сигнала, которые смещены на 90 градусов, и каждый смешивают с полученным сигналом. Это смешивание производит Я (т) и Q (T). Фазовая когерентность передаваемого сигнала имеет решающее значение для работы импульсно-доплеровской. На диаграмме сверху показаны фазы волнового фронта в I / Q.
Каждый из дисков, показанных на этой диаграмме представляет собой единый образец, взятый из нескольких импульсов передачи, т.е. того же образец смещения на период передачи (1 / PRF). Это неоднозначный диапазон. Каждый образец будет аналогичной, но с задержкой на один или более ширины импульса позади тех, которые показаны. Сигналы в каждом образце состоит из сигналов от отражений в нескольких диапазонах.
Диаграмма показывает, против часовой спирали, который соответствует въездному движению. Это вверх-Доплера. Вниз-доплеровский будет производить по часовой стрелке по спирали.
Оконная
Процесс цифровой дискретизации вызывает звон в фильтрах, которые используются для удаления отраженных сигналов от медленно движущихся объектов. Отбор пробы вызывают частоты боковых лепестки будут производиться рядом с истинным сигналом для входного сигнала, который представляет собой чистый тон. Оконная подавляет боковые лепестки, вызванные процессом дискретизации.
Окно число выборок, используемых в качестве входного сигнала в фильтр.
Процесс окна принимает ряд сложных констант и умножает каждый образец на его соответствующей константу окна до того, как образец наносят на фильтр.
Дольф-Чебышев оконный обеспечивает оптимальное подавление обработки боковых лепестков.
фильтрация
 Импульсно-доплеровская обработка сигнала. Диапазон выборка ось представляет отдельные образцы , взятых между каждым передающим импульсом. Импульсов Интервал ось представляет каждый последующий интервал передачи импульсов , в течение которого берутся образцы. Быстрое преобразование Фурье преобразует процесс отсчетов во временной области в частотную области спектра. Это иногда называют кровать ногтей .
Импульсно-доплеровская обработка сигнала. Диапазон выборка ось представляет отдельные образцы , взятых между каждым передающим импульсом. Импульсов Интервал ось представляет каждый последующий интервал передачи импульсов , в течение которого берутся образцы. Быстрое преобразование Фурье преобразует процесс отсчетов во временной области в частотную области спектра. Это иногда называют кровать ногтей .Импульсно-доплеровские обработки сигналов выделяют отраженные сигналы на ряд частотных фильтров. Существует отдельный набор фильтров для каждого неоднозначного диапазона. Образцы I и Q, описанные выше, используются, чтобы начать процесс фильтрации.
Эти образцы организованы в MXN матрицу из временной области образцов , показанных в верхней части диаграммы.
Образцы временной области преобразуются в частотной области с использованием цифрового фильтра. Это обычно включает в себя быстрое преобразование Фурье (БПФ). Побочные лопасти производятся в процессе обработки сигналов и стратегию подавления боковых лепестков, такие как функция Дольфа-Чебышева окна , требуется , чтобы уменьшить количество ложных тревог.
Все образцы , взятые из образца 1 периода выборки образуют входной сигнал на первом наборе фильтров. Это первый неоднозначным интервал диапазона.
Все образцы , взятые из образца 2 периода выборки образуют входной сигнал на втором наборе фильтров. Это второй неоднозначным интервал диапазона.
Это продолжается до тех пор , образцы , взятые из образца N периода выборки не образуют входные данные для последнего набора фильтров. Это самый дальний неоднозначным интервал диапазона.
Результатом является то, что каждая неоднозначным диапазона будет производить отдельный спектр, соответствующий со всеми доплеровских частот в этом диапазоне.
Цифровой фильтр производит так много частотных выходов как количество передающих импульсов, используемые для отбора проб. Производство одного БПФ с 1024 частотных выходов требуется 1024 импульсов передачи для ввода.
обнаружение
Обработка обнаружения для импульсно-доплеровского производит неоднозначный диапазон и неоднозначное скорость, соответствующее одному из выходов из FFT одного из образцов диапазона. Рефлексы попадают в фильтры, соответствующие разным частотам, которые отделяют погоды явление, рельеф местности, и самолет в различных зонах скорости в каждом диапазоне.
Несколько одновременных критериев требуется до того, как сигнал может квалифицироваться как обнаружение.
 Постоянное Ложное срабатывание сигнализации Скорость выполняется на выходе FFT.
Постоянное Ложное срабатывание сигнализации Скорость выполняется на выходе FFT.Постоянная обработка ложных тревог используется для проверки каждого выхода FFT для обнаружения сигналов. Это адаптивный процесс , который автоматически регулирует к фоновому шуму и воздействиям окружающей среды. Существует клетки в тесте , где окружающие клетки добавляют вместе, умноженное на константу, и используется , чтобы установить порог.
- T час р е s час о L d С р я T е р я a { С е L L ( N ) > [ С е L L ( N — 2 ) + С е L L ( N — 1 ) + С е L L ( N + 1 ) + С е L L ( N + 2 ) ] × С о N s T a N T {\ Displaystyle Порог \ Критерии {\ {начинаются случаи} \ mathrm {\ {начинаются выровнены} клеток (п)> [Ячейка (п-2) + \\ сотовый (п-1) + \\ сотовый (п + 1) + \\ сотовый (п + 2)] \ \\ Константа Таймс \ {конец выровнен}} \ {конец дела}}}
Область вокруг обнаружения проверяется , чтобы определить , когда знак наклона изменяется от до , который является расположение обнаружения (локальный максимум). Обнаружения для одного неоднозначного диапазона сортируются в порядке убывания амплитуды. + {\ Displaystyle +} — {\ Displaystyle -}
- п е a К С р я T е р я a { ( Δ A м п L я T U d е Δ F р е Q U е N с Y ) С е L L ( N — 1 ) < 0 ( Δ A м п L я T U d е Δ F р е Q U е N с Y ) С е L L ( N + 1 ) > 0 {\ Displaystyle Пик \ Критерии {\ {начинаются случаи} \ mathrm {\ влево ({\ гидроразрыва {\ Delta Амплитудно} {\ Delta Частота}} \ справа) Ячейка (п-1) <0} {\\\ mathrm \ левый ({\ гидроразрыва {\ Delta Амплитудно} {\ Delta Частота}} \ справа) Ячейка (п + 1)> 0} \ {конец дела}}}
Обнаружение охватывает только скорость, которые превышают параметры отклонения скорости. Например, если отказ скорость установлена на 75 миль / час, а затем град движется 50 миль / час внутри грозы не будет обнаружен, но самолет движется на 100 миль / будет обнаружен час.
- S п е е d С р я T е р я a { ( С × D о п п L е р F р е Q U е N с Y 2 × T р a N s м я T F р е Q U е N с Y ) > р е J е с T я о N {\ Displaystyle скорости \ Критерии {\ начинаются {случаи} \ mathrm {\ влево ({\ гидроразрыва {C \ раз доплеровский \ Частотные} {2 \ раз Transmit \ Частота}} \ справа)> Отказ} \ конец {случаи}} }
Для моноимпульсного РЛСА , обработки сигналов идентичны для главного лепестка и боковые лепестки — заглушки каналов. Это определяет , если местоположение объекта находится в главном лепестке или если она смещена выше, ниже, слева или справа от луча антенны .
- M a я N L о б е С р я T е р я a { M a я N L о б е > С о N s T a N T × S я d е L о б е {\ Displaystyle Mainlobe \ Критерии {\ BEGIN {случаи} \ mathrm {Main \ мочку> Constant \ раз Side \ лепестка} \ конец {случаи}}}
Сигналы, которые удовлетворяют все эти критерии, являются обнаружениями. Они сортируются в порядке убывания амплитуды (наибольшее к наименьшему).
Отсортированные обнаружения обрабатываются с разрешением неоднозначности диапазона алгоритмом для определения истинного диапазона и скорости мишени отражения.
разрешение неоднозначности
 Импульсно-доплеровские неоднозначности зоны. Каждая синяя зона без метки представляет собой комбинацию скорости / диапазон, который будет сложенной в недвусмысленную зону. Районы за пределами голубых зон слепые диапазоны и слепые скорости, которые заполняются с использованием нескольких PRF и частотной маневренности.
Импульсно-доплеровские неоднозначности зоны. Каждая синяя зона без метки представляет собой комбинацию скорости / диапазон, который будет сложенной в недвусмысленную зону. Районы за пределами голубых зон слепые диапазоны и слепые скорости, которые заполняются с использованием нескольких PRF и частотной маневренности.Импульсный доплеровский радар может иметь 50 или более импульсов между РЛС и отражателем.
Импульсный доплеровский зависит от средней частоты повторения импульсов (PRF) примерно от 3 кГц до 30 кГц. Каждая передающая импульс отделены друг от 5 км до 50 км.
Диапазон и скорость цели складываются с помощью операции по модулю , полученной способом отбора проб.
Истинный диапазон найден с помощью процесса разрешения неоднозначности.
Полученные сигналы от нескольких PRF сравниваются с использованием процесса разрешения неоднозначности диапазона.
Полученные сигналы также по сравнению с использованием процесса разрешения неоднозначности частоты.
Замок
Скорость отражателя определяется путем измерения изменения в диапазоне от отражателя в течение короткого промежутка времени. Это изменение в диапазоне делится на промежуток времени, чтобы определить скорость.
Скорость также найти с помощью доплеровской частоты для обнаружения.
Два вычитаются, а разница в среднем на короткое время.
- Стопорные критерии { ( Δ р Δ T ) — ( С × Доплера частота 2 × Частота передачи ) < порог {\ Displaystyle {\ текст {критерии блокировки}} {\ BEGIN {случаи} \ mathrm {\ влево ({\ гидроразрыва {\ Delta R} {\ Delta T}} \ справа) — \ влево ({\ гидроразрыва {C \ раз {\ текст {Доплера частота}}} {2 \ раз {\ текст {Transmit Frequency}}}} \ справа) <{\ текст {Threshold}}} \ {конец дела}}}
Если средняя разница падает ниже порогового значения, то сигнал представляет собой замок .
Блокировка означает , что сигнал подчиняется механика Ньютона . Допустимые отражатели производят блокировку. Неверные сигналы не делают. Недействительные отражения включают такие вещи , как вертолетные лопасти, где Доплер не соответствует скорости , что транспортное средство двигается по воздуху. Недействительные сигналы включают в себя микроволновые печи , сделанные из источников отдельно от передатчика, например, радар заклиниванию и обмана .
Отражатели, которые не производят сигнал блокировки не могут быть отслежены с использованием обычного метода. Это означает, что контур обратной связи должен быть открыто для объектов, таких как вертолеты, так как основной корпус транспортного средства может быть ниже отклонение скорости (только лопасти открыты).
Переход на трек автоматически для обнаружений, которые производят блокировку.
Переход к отслеживать, как правило, пособие для неньютоновских источников сигнала, но дополнительная обработка сигнала может быть использована для автоматизации процесса. Допплер обратная скорости должны быть отключены в непосредственной близости от источника сигнала для получения данных дорожки.
трек
Режим Трек начинается, когда обнаружение выдержан в определенном месте.
Во время дорожки, положение XYZ отражателя определяется с использованием декартовой системы координат , а скорость XYZ отражателя измеряется предсказать будущую позицию. Это похоже на эксплуатацию фильтра Калмана . Скорость XYZ умножается на время между сканирование для определения каждой новой точки прицеливания для антенны.
Радар использует полярную систему координат . Положение дорожки используется для определения влево-вправо и вверх-вниз точки прицеливания для положения антенны в будущем. Антенна должна быть направлена на позиции , которая будет рисовать цель с максимальной энергией и не тащили за ним, в противном случае радар будет менее эффективным.
Оценивается расстояние до отражателя сравнивается с измеренным расстоянием. Разница заключается ошибка расстояния. Расстояние ошибка сигнал обратной связи используется для коррекции информации о местоположении и скорости для данных трека.
Доплеровская частота обеспечивает дополнительный сигнал обратной связи , аналогичный обратную связь , используемую в цикле фазовой автоподстройки . Это повышает точность и надежность информации о положении и скорости.
Амплитуды и фазы для сигнала , возвращаемого отражатель обрабатываются с использованием Моноимпульсных радиолокационных методов во время трека. Это измеряет смещение между положением антенны указывая и положение объекта. Это называется ошибка угла .
Каждый отдельный объект должен иметь свою собственную независимую информацию о треке. Это называется историей трека, и это распространяется обратно в течение короткого промежутка времени. Это может быть столько, сколько часами для бортовых объектов. TimeSpan для подводных объектов может распространяться обратно через неделю или больше.
Дорожки , где объект производит обнаружение называются активными дорожками .
Дорожки продолжаются на короткое время в отсутствии каких — либо обнаружений. Дорожки без каких — либо обнаружений являются курсировали дорожки . Информация о скорости используются для оценки антенн с целью позиции. Они упали после краткого периода.
Каждый трек имеет окружающий объем захвата , приблизительно форму футбола. Радиус захвата объема примерно расстояние быстрее обнаружить транспортное средство может перемещаться между последовательными сканирований этого объема, который определяется с помощью фильтра полосы пропускания приемника в импульсно-доплеровского радиолокатора.
Новые треки , которые попадают в объеме захвата с выбегом дорожки являются кросс коррелирует с историей дорожки близлежащего поплыл дорожки. Если положение и скорость совместимы, то поплыли историю трека сочетаются с новым треком. Это называется присоединиться трек .
Новый трек в объеме захвата активного трека называется раскол трек .
информация дорожки импульсно-доплеровский включает в себя область объекта, ошибки, ускорение, и состояние блокировки, которые являются частью логики решения с участием присоединиться треков и сплит треков.
Другие стратегии используются для объектов , которые не удовлетворяют ньютоновской физики .
Люди, как правило, представлены с несколькими дисплеями, которые показывают информацию из данных дорожки и сырых обнаруженных сигналов.
Индикатор положения плана и скроллинг уведомления являются автоматическими и не требуют каких-либо действий пользователя. Остальные дисплеи активировать, чтобы показать дополнительную информацию только тогда, когда трек выбран пользователем.
Рекомендации
Радар | электроника | Британника
Радар , электромагнитный датчик, используемый для обнаружения, определения местоположения, отслеживания и распознавания различных объектов на значительных расстояниях. Он работает, передавая электромагнитную энергию на объекты, обычно называемые целями, и наблюдая за отраженным от них эхом. Целями могут быть самолеты, корабли, космические корабли, автомобильные транспортные средства и астрономические тела или даже птицы, насекомые и дождь. Помимо определения присутствия, местоположения и скорости таких объектов, радар иногда может также определять их размер и форму.Что отличает радар от оптических и инфракрасных датчиков, так это его способность обнаруживать далекие объекты в неблагоприятных погодных условиях и определять их дальность или расстояние с точностью.
Британская викторина
Гаджеты и технологии: факт или вымысел?
Голограммы часто встречаются на кредитных картах.
Радар является «активным» сенсорным устройством, поскольку он имеет собственный источник освещения (передатчик) для определения местоположения целей. Обычно он работает в микроволновом диапазоне электромагнитного спектра, измеряемого в герцах (циклах в секунду), на частотах от 400 мегагерц (МГц) до 40 гигагерц (ГГц). Однако он использовался на более низких частотах для приложений дальнего действия (частоты до нескольких мегагерц, которые являются HF [высокочастотным] или коротковолновым диапазоном), а также на оптических и инфракрасных частотах (частоты лазерного радара, или лидар).Компоненты схем и другое оборудование радарных систем различаются в зависимости от используемой частоты, а размеры систем варьируются от достаточно маленьких, чтобы поместиться на ладони, до таких огромных, что они могли бы заполнить несколько футбольных полей.
Радар быстро развивался в течение 1930-40-х годов для удовлетворения потребностей военных. Он по-прежнему широко используется в вооруженных силах, где зародились многие технологические достижения. В то же время радар находит все большее количество важных гражданских применений, в частности, управление воздушным движением, наблюдение за погодой, дистанционное зондирование окружающей среды, навигацию самолетов и судов, измерение скорости для промышленных приложений и для правоохранительных органов, космического наблюдения и планетарного наблюдения. наблюдение.
Основы РЛС
Радар обычно включает в себя излучение узкого луча электромагнитной энергии в космос от антенны ( см. рисунок). Узкий луч антенны сканирует область, где ожидаются цели. Когда цель освещается лучом, он улавливает часть излучаемой энергии и отражает часть обратно в сторону радиолокационной системы. Поскольку большинство радиолокационных систем не передают и не принимают одновременно, одна антенна часто используется с разделением по времени как для передачи, так и для приема.
Принцип работы радара Переданный импульс уже прошел цель, которая отразила часть излучаемой энергии обратно в сторону радиолокационного блока. Encyclopdia Britannica, Inc. Получите эксклюзивный доступ к контенту нашего 1768 First Edition с подпиской. Подпишитесь сегодняПриемник, прикрепленный к выходному элементу антенны, извлекает полезные отраженные сигналы и (в идеале) отклоняет те, которые не представляют интереса. Например, интересующий сигнал может быть эхом от самолета.Сигналы, которые не представляют интереса, могут быть эхом от земли или дождя, которые могут маскировать и мешать обнаружению желаемого эхо-сигнала от самолета. Радар измеряет местоположение цели по дальности и угловому направлению. Дальность или расстояние определяется путем измерения общего времени, которое требуется радиолокационному сигналу, чтобы пройти туда и обратно к цели и обратно ( см. Ниже ). Угловое направление цели определяется по направлению, в котором направлена антенна во время приема эхо-сигнала.Посредством измерения местоположения цели в последовательные моменты времени можно определить недавний путь цели. Как только эта информация будет установлена, можно предсказать будущий путь цели. Во многих приложениях обзорных радаров цель не считается «обнаруженной» до тех пор, пока не будет установлена ее траектория.
,Pulse_Doppler_Radar_System — Примеры — База знаний AWR
Где найти этот пример
Выберите Справка> Открыть примеры … из меню и введите либо имя примера, указанное выше, либо одно из ключевых слов ниже.
Или в Версии 14 или выше вы можете открыть проект прямо с этой страницы, используя эту кнопку. Обязательно выберите Включить управляемую справку перед нажатием этой кнопки.
Открыть пример установкиЗамечания по проектированию
Радиолокационная система с импульсным доплером
В этой рабочей области представлена конструкция радиолокационной системы с импульсным доплером (PD) с генератором сигналов, радиочастотным передатчиком, антенной, помехами, радиоприемником, обнаружением движущихся целей (MTD), процессором постоянной частоты ложных тревог (CFAR) и детектором сигналов для целей моделирования.
Модели моделирования можно использовать в качестве шаблона для различных приложений PD. Сигнал радара является функцией частоты повторения импульсов (PRF), мощности и ширины импульса (рабочего цикла). Эти параметры могут быть изменены для разных случаев. При моделировании радиолокационный сигнал также может быть заменен любым заданным сигналом с помощью средства чтения файлов данных, в котором можно легко использовать записанные или другие пользовательские данные.
ВЧ передатчик включает генераторы, смесители, усилители и фильтры.Усиление, полоса пропускания и несущая частота могут быть указаны на основе тестового примера. Доплеровская частота и задержка в канале генерируются для описания отраженного сигнала цели с разными скоростями и расстоянием. Включена модель помех от радара, и спектр мощности может быть сформирован.
ВЧ-приемник включает генераторы, смесители, усилители и фильтры. Усиление, полоса пропускания и несущая частота могут быть указаны в соответствии со спецификацией испытаний. Для более эффективного обнаружения движущегося объекта используется обнаружение движущейся цели (MTD).MTD основан на высокопроизводительном алгоритме обработки сигналов для радара частичного разряда. Банк доплеровских фильтров или операторов БПФ покрывает все возможные ожидаемые целевые доплеровские сдвиги. Выход MTD используется для обработки постоянной частоты ложных тревог (CFAR). Предусмотрены измерения скорости обнаружения и частоты ложных тревог.
Настройка системы
Система настраивается с использованием следующих параметров:
Уровень сигнала ЛЧМ установлен на 0 дБм, PRF = 2 кГц и DUTY = 25%.Доплеровское смещение частоты, расстояние до цели и углы прихода (THETA / PHI) определяются в файле данных и меняются со временем. Эти параметры используются для определения целевой модели. Распределение магнитуды помех устанавливается как Рэлея, а спектр мощности препятствий формируется как Вейбулла. В приемнике размер МПД БПФ установлен равным 64.
Результаты моделирования
При этих настройках результаты моделирования отображаются ниже. Форма сигнала радара измеряется во временной области на входе приемника.Обратный сигнал цели часто блокируется помехами, помехами и шумом. Следовательно, обнаружение во временной области невозможно, и MTD используется для выполнения доплеровского обнаружения и обнаружения диапазона в частотной области. В модели MTD данные сгруппированы по соответствующему целевому диапазону и доплеровской частоте. После этого процессор CFAR используется для установки порога принятия решения на основе требуемых вероятностей обнаружения и ложной тревоги.
Результаты моделирования показаны на графике System Metrics.
,Использование и понимание доплеровского радара
Основы радиолокации и доплеровский сдвиг
NEXRAD (радар нового поколения) получает информацию о погоде (осадки и ветер) на основе возвращенной энергии. Радар излучает всплеск энергии (зеленый на анимированном изображении). Если энергия попадает в объект (капля дождя, снежинка, град, жук, птица и т. Д.), Энергия рассеивается во всех направлениях (синий). Примечание: это небольшая часть излучаемой энергии, которая рассеивается обратно в сторону радара.
Узнайте о Radar Beam здесь
Этот отраженный сигнал затем принимается радаром во время периода прослушивания. Компьютеры анализируют силу возвращенного импульса, время, которое потребовалось, чтобы добраться до объекта и обратно, а также фазу или доплеровский сдвиг импульса. Этот процесс излучения сигнала, прослушивания любого возвращенного сигнала и последующего излучения следующего сигнала происходит очень быстро, примерно до 1300 раз в секунду!
NEXRAD тратит огромное количество времени на «прослушивание» возвращаемых сигналов.Когда время всех импульсов каждый час суммируется (время, в которое радар фактически передает), радар «включен» примерно на 7 секунд каждый час. Остальные 59 минут и 53 секунды тратятся на прослушивание любых возвращенных сигналов.
Узнайте о различных режимах сканирования радара здесь
Способность обнаруживать «сдвиг фазы» импульса энергии делает NEXRAD доплеровским радаром. Фаза возвращаемого сигнала обычно изменяется в зависимости от движения капель дождя (или жуков, пыли и т. Д.).). Этот эффект Доплера был назван в честь открывшего его австрийского физика Кристиана Доплера. Скорее всего, вы испытывали «эффект Доплера» около поездов.
Когда поезд проезжает мимо вас, вы могли заметить, что высота звука в свистке поезда меняется с высокой на низкую. По мере приближения поезда звуковые волны, из которых состоит свист, сжимаются, делая высоту звука выше, чем если бы поезд был неподвижен. Точно так же, когда поезд удаляется от вас, звуковые волны растягиваются, снижая высоту свистка.Чем быстрее движется поезд, тем сильнее меняется высота свистка, когда он проезжает мимо вашего местоположения.
Тот же эффект имеет место в атмосфере, когда импульс энергии NEXRAD ударяет по объекту и отражается обратно в сторону радара. Компьютеры радара измеряют изменение фазы отраженного импульса энергии, которое затем преобразует это изменение в скорость объекта по направлению к радару или от него. Информация о движении объектов к радару или от него может быть использована для оценки скорости ветра.Эта способность «видеть» ветер — это то, что позволяет Национальной метеорологической службе обнаруживать образование торнадо, что, в свою очередь, позволяет нам выдавать предупреждения о торнадо с более ранним уведомлением.
|
Теперь посмотрим на данные радара
Есть два основных типа данных: скорость и отражение.
Данные отражательной способности показывают нам силу энергии, которая возвращается к радару после того, как он отскакивает от целей с осадками. Другие цели, не связанные с осадками, будут возвращать энергию, но пока мы будем иметь дело только с осадками. Как правило, чем сильнее возвращаемая энергия, тем тяжелее осадки. Узнайте больше об отражательной способности здесь.
Данные о скорости получают из фазы или доплеровского сдвига возвращенной энергии.Компьютеры радара рассчитают сдвиг и определят, движутся ли осадки к радару или от него, и насколько быстро, а затем применит соответствующий цвет к этим направлениям и скоростям. Красный цвет обычно обозначает цель, удаляющуюся от радара, а зеленый цвет применяется к целям, движущимся к радару. Интенсивность этих цветов определяет его предполагаемую скорость. Узнайте больше о Velocity здесь.
На изображении выше вы можете увидеть данные о скорости, связанные с сильным штормом, отображаемым в данных отражательной способности.Это отличный пример того, как торнадо выглядит на дисплее скорости. Щелкните изображение для более детального просмотра. Радар расположен на юго-востоке или в правом нижнем углу экрана компьютера. Обратите внимание на ярко-красный или сильные исходящие скорости рядом с ярко-зеленым или на входящие скорости. Это указывает на сильно вращающийся столб воздуха. В сочетании с рисунком отражательной способности, который показывает сигнатуру крючка, как в этом случае, часто возникает или вот-вот произойдет торнадо.
Иногда доплеровский радар WSR-88D видит цели без осадков
Если есть «цель», и она отражает энергию радара обратно в радар, радар отобразит ее, как будто это осадки. В радар встроена некоторая логика, которая помогает ему различать цели с осадками и без осадков. Но иногда мы видим любопытные вещи на экране нашего радара. Вот несколько:
Кольца для птиц.Чаще всего они случаются при падении вокруг водоемов, температура которых ночью обычно выше, чем на окружающей суше. Это также время, когда птицы собираются для сезонной миграции. Ночью птицы отдыхают / гнездятся в озерах и вокруг них. Незадолго до восхода солнца часто происходит скоординированный взлет и расселение птиц по окрестным полям для кормления в течение дня. Нажмите на изображение слева, чтобы быстро анимировать кольца птиц.
| Аномальное распространение | Местность | AP & Terrain |
Помехи ветряной электростанции. Ветряные электростанции могут воздействовать на доплеровские радары тремя способами, если лопасти турбины движутся и находятся в пределах прямой видимости радара.Если они находятся достаточно близко (в пределах нескольких километров), они могут частично блокировать значительную часть луча и ослаблять данные в пределах диапазона ветряной электростанции. Они также могут отражать энергию обратно на радар и появляться в виде препятствий (AP) на изображении радара и загрязнять базовые данные об отражательной способности. Данные отражательной способности используются радиолокационными алгоритмами для оценки количества осадков и обнаружения определенных характеристик шторма. Наконец, они могут влиять на данные скорости, которые также используются операторами радаров и различными алгоритмами в процессорах данных радара для обнаружения определенных характеристик шторма, таких как мезоциклоны, относительное движение шторма, турбулентность и т. Д.Узнайте больше здесь.
Солнечные помехи. Дважды в день, на восходе и закате, радар испытывает помехи от электромагнитной энергии, излучаемой солнцем. На восходе и закате есть точки, в которых антенна радара направлена прямо на солнце и поражается этой энергией. Затем это отображается на нашем дисплее как всплеск возвращенной энергии. Оно краткое, обычно происходит только во время одного сканирования тома. Обратите внимание на изображении слева, что закат немного южнее западного направления.Дата — 11 марта 2009 года. Менее чем через 2 недели мы будем на весеннем равноденствии. Солнце зайдет к западу от радара.
Шлейфы дыма . В засушливые периоды, когда происходит контролируемое горение или неограниченные лесные пожары, наш радар обнаруживает дымовые шлейфы, связанные с пожарами. Многие из больших шлейфов дыма возникают в результате предписанных или контролируемых ожогов. Это пожары, преднамеренно разводимые федеральными / региональными / местными властями для целей землепользования.Другие пожары могут быть на частных землях. Два шлейфа в этом примере (щелкните изображение, чтобы просмотреть анимацию) были предписаны Министерством обороны штата Висконсин для сжигания.
.