
Обнаружение цели в импульсно-доплеровской РЛС на основе многообзорного накопления сигналов Текст научной статьи по специальности «Электротехника, электронная техника, информационные технологии»
Телекомунікації, радіолокація, радіонавігація та електроакустика
ТЕЛЕКОМУНІКАЦІЇ, РАДІОЛОКАЦІЯ, РАДІОНАВІГАЦІЯ ТА ЕЛЕКТРОАКУСТИКА
УДК 621.396.96
ОБНАРУЖЕНИЕ ЦЕЛИ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС НА ОСНОВЕ МНОГООБЗОРНОГО НАКОПЛЕНИЯ СИГНАЛОВ
Неуймин А. С., аспирант; Жук С. Я., д.т.н., профессор
Национальный технический университет Украины «Киевский политехнический институт», г. Киев, Украина
TARGET DETECTION IN PULSE-DOPPLER RADAR BASED ON MULTISCANNING SIGNAL INTEGRATION
Neuimin O., postgraduate student; Zhuk S., Doc. Of Sci (Technics), Professor
Введение
Накопление сигналов широко используется при решении задач оптимального приема в различных радиоэлектронных системах [1]. Для обнаружения движущихся объектов на последовательности изображений алгоритмы накопления и сопровождения используются совместно и получили название «сопровождение до обнаружения» (track-before-detect) [2]. В работе [3] данный подход предложено использовать для обнаружения траектории цели в обзорных радиолокационных станциях (РЛС) путем многообзорного некогерентного накопления сигналов. Представляет интерес разработка алгоритмов многообзорного накопления сигналов импульснодоплеровскими (ИД) РЛС, которые находят широкое распространение на практике.
Цель статьи. В работе получен двухэтапный алгоритм, основанный на многообзорном некогерентном накоплении сигналов в ИД РЛС. В каждом обзоре на первом этапе выполняется первичное обнаружение сигналов с достаточно высокой вероятностью ложной тревогой. На втором этапе для выделения отметок цели решается задача сопровождения и осуществляется межобзорное накопление сигналов. Решение о наличии цели принимается по накопленной статистике за K обзоров. Эффективность алгоритма исследована на модельном примере.
Постановка задачи
Рассматривается задача многообзорного накопления при измерении координат дальности г и радиальной скорости г. Отраженный от цели сигнал представляет собой когерентную пачку радиоимпульсов со случайной начальной фазой и известной амплитудой, искаженную белым шу-
Серія — Радіотехніка. Радіоапаратобудування. — 2013. — №53
Телекомунікації, радіолокація, радіонавігація та електроакустика
мом [1]. Полагается, что сигнал цели попадает в свободную от мешающих отражений зону, а также задача устранения неоднозначности измерений по дальности и по скорости решена.
На k -ом обзоре в результате когерентно-доплеровской фильтрации сигналов в каждом элементе разрешения по дальности и радиальной скорости определяется нормированная достаточная статистика Zk [4]. При
отсутствии цели Zk подчиняется закону Релея
P(Zk) = Zk exP
Zа при наличии
закону Райса P(Zk) = Zk exP <
(1)
(2)
где Zk = Zk / <5n; Zk — достаточная статистика в элементе разрешения по дальности и по скорости на k -ом обзоре; — дисперсия шума на выходе одного канала корреляционно-фильтрового приемника; I0 {•} — функция
Бесселя нулевого порядка; q = Es / an — отношение сигнал/шум; Es — энергия сигнала. с выходным порогом Нвых.
с выходным порогом Нвых.
Оно сводится к задаче обнаружения траектории цели и заключается в проверке двух альтернативных гипотез: Н0 — гипотезы об отсутствии цели (подтверждение ложности сопровождаемой траектории) и Нх — гипотезы о наличии цели (подтверждении истинности сопровождаемой траектории).
Разработка двухэтапного алгоритма многообзорного некогерентного накопления сигнала
Для обнаружения траектории цели предлагается использовать алгоритм обнаружения по критерию К / К [5], в котором наряду с измеренными координатами ук = (/)/’,гк ) также учитываются достаточные статистики Zk.
90 Вісник Національного технічного університету України «КПІ» Серія — Радіотехніка. Радіоапаратобудування. — 2013. — №53
Телекомунікації, радіолокація, радіонавігація та електроакустика
Для выделения траектории цели используется простейший алгоритм сопровождения, основанный на гипотезе движения слабо маневрирующей
цели [5]. Экстраполяция координат і -ой отметки г*\г*1 на следующий обзор выполняется с помощью уравнений*/ I , •/ ГТ1
Г = Г + Г 1
и и —
• *7 • 7
Г —Г
и ’
где ги, ги — измеренные значения дальности и радиальной скорости і -он отметки соответственно.
Дисперсии ошибки прогноза дальности и скорости вычисляются как
_2Г4
*2 2 2гп2 1
а/ =<5Г + <5}Т + й
*2 2 2гті2
=Ъг+ЪаТ ,
2 Аг2 2 Аг2
где аг = ——-дисперсия ошибки измерения дальности; а,-
— дис-
12 ’12 Персия ошибки измерения скорости; Дг,Дг — размеры элементов разре-
шения по дальности и по скорости соответственно; ас
дисперсия уско-
рения цели по дальности. eKcn, что позволяет получить выигрыш в отношении сигнал/шум по
eKcn, что позволяет получить выигрыш в отношении сигнал/шум по
Литература
1. Информационные технологии в радиотехнических системах : учеб. пособие для вузов / [Васин В. А., Власов И. Б., Егоров Ю. М. и др.]; под ред. И. Б. Федоров.— М. : Изд-во МГТУ им. Н. Э. Баумана, 2003. — 671 с. — ISBN 5-7038-2263-7.
Таблица 2
K 1 2 3 4 5
Р срыва — 0.0056 0.012 0.022 0.032
Nсопр. ЛТр 10 4.98 2.51 1.27 0.65
Вісник Національного технічного університету України «КПІ» 95
Серія — Радіотехніка. Радіоапаратобудування. — 2013. — №53
Телекомунікації, радіолокація, радіонавігація та електроакустика
2. Johnston, L. A. Performance analysis of a dynamic programming track before detect algorithm / L. A.Johnston, V. Krishnamurthy // IEEE Transactions on Aerospace and electronic systems.— 2002.— V.38.— № 1.— P. 228—242.
3. Кричигин А. В. Алгоритмы многообзорного обнаружения траектории движущейся цели / А. В. Кричигин, Е. А. Маврычев // Труды НГТУ им. Р. Е. Алексеева.— 2010.— № 4.— С. 11—18.
4. Цифровая обработка сигналов в многофункциональных РЛС: часть 2 — алгоритмы обработки радиолокационных сигналов / Д. Ю. Бобров [и др.] // Цифровая обработка сигналов. — 2002. — №1. — C. 28—39.
5. Кузьмин С. З. Основы проектирования систем цифровой обработки радиолокационной информации / С.
6. Вентцель Е. С. Теория вероятностей: Учебник для вузов. / Е. С. Вентцель.— [7-е изд.]. — М. : Высш. шк, 2001. — 575 с.
7. Сосулин Ю. Г. Теоретические основы радиолокации и радионавигации: Учеб. пособие для вузов / Ю. Г. Сосулин. — М. : Радио и связь, 1992. — 304 с. — ISBN 5-25601019-0.
References
1. Informatsionnyie tekhnologii v radiotekhnicheskikh sistemakh : ucheb. posobiie dlia vuzov / [Vasin V.A., Vlasov I.B., Ehorov Yu.M. i dr.]; pod red. I.B. Fedorov.— M.: Izd-vo MHTU im. N.E. Baumana, 2003.— 671 s. — ISBN 5-7038-2263-7.
2. Johnston, L.A. Performance analysis of a dynamic programming track before de-tect algorithm / L.A.Johnston, V.Krishnamurthy // IEEE Transactions on Aerospace and electronic systems.— 2002.— V.38.— № 1.— P. 228-242.
3. Krichihin A.V. Alhoritmy mnohoobzornoho obnaruzheniia traiektorii dvizhushcheisia tseli / A.V. Krichihin, E.A. Mavrychev // Trudy NHTU im. R.E. Alekseieva.— 2010.— №4.— S. 11-18.
4. Tsifrovaia obrabotka sihnalov v mnohofunktsionalnykh RLS: chast 2 — alhoritmy obrabotki radiolokatsionnykh sihnalov / D. Yu. Bobrov [i dr.] // Tsifrovaia obrabotka sihnalov.— 2002.— №1.— C. 28-39.
5. Kuzmin S.Z. Osnovy proektirovaniia sistem tsifrovoi obrabotki radiolokatsionnoi in-formatsii / S. Z. Kuzmin.— M.: Radio i sviaz, 1986. — 352 s.
6. Venttsel E.S. Teoriia veroiatnostei: Uchebnik dlia vuzov / E.S. Venttsel. — [7-e izd.].— M.: Vyssh. shk, 2001. — 575 s.
7. Sosulin Yu.H. Teoreticheskiie osnovy radiolokatsii i radionavihatsii: Ucheb. posobiie dlia vuzov / Yu.H. Sosulin. — M.: Radio i sviaz, 1992. — 304 s.— ISBN 5-256-01019-0.
Sosulin Yu.H. Teoreticheskiie osnovy radiolokatsii i radionavihatsii: Ucheb. posobiie dlia vuzov / Yu.H. Sosulin. — M.: Radio i sviaz, 1992. — 304 s.— ISBN 5-256-01019-0.
Неуймін О. С., Жук С. Я. Виявлення цілі в імпульсно-допплерівській РЛС на основі багатооглядового накопичення сигналів. Задача виявлення рухомих цілей оглядовими радіолокаційними станціями, як правило, вирішується незалежно в кожному огляді, що не завжди ефективно при малих відношеннях сигнал/шум. Тому, важливе практичне значення має розробка алгоритмів виявлення цілі з накопиченням сигналів, отриманих за кілька оглядів. У статті на основі багатооглядового некогерентного накопичення сигналів розроблений двоетапний алгоритм виявлення траєкторії цілі в імпульс-но-доплерівській РЛС. Аналіз отриманого алгоритму виконано на прикладі виявлення слабо маневруючої цілі за координатами дальності і радіальної швидкості за допомогою статистичного моделювання.
Ключові слова: виявлення цілі, імпульсно-доплерівська РЛС, супроводження до виявлення, накопичення сигналів.
96 Вісник Національного технічного університету України «КПІ»
Серія — Радіотехніка. Радіоапаратобудування. — 2013. — №53
Телекомунікації, радіолокація, радіонавігація та електроакустика
Неуймин А. С., Жук С. Я. Обнаружение цели в импульсно-доплеровской РЛС на основе многообзорного накопления сигналов. Задача обнаружения движущихся целей обзорными радиолокационными станциями, как правило, решается независимо в каждом обзоре, что не всегда эффективно при малых отношениях сигнал/шум. Поэтому, важное практическое значение имеет разработка алгоритмов обнаружения цели с накоплением сигналов, полученных за несколько обзоров. В статье на основе многообзорного некогерентного накопления сигналов разработан двухэтапный алгоритм обнаружения траектории цели в импульсно-доплеровской РЛС. Анализ полученного алгоритма выполнен на примере обнаружения слабо маневрирующей цели по координатам дальности и радиальной скорости с помощью статистического моделирования.
Анализ полученного алгоритма выполнен на примере обнаружения слабо маневрирующей цели по координатам дальности и радиальной скорости с помощью статистического моделирования.
Ключевые слова: обнаружение цели, импульсно-доплеровская РЛС, сопровождение до обнаружения, накопление сигналов.
Neuimin O., Zhuk S. Target detection in pulse-Doppler radar based on multi-scanning signal integration.
Introduction. Development of multi-scanning signal integration algorithms for pulse-Doppler radars which are widely used in practice is of great practical importance.
Problem statement. The problem of multi-scanning signal integration measuring range and range-rate is considered. The reflected signal from a target is a distorted white noise coherent packet of radio pulses with random initial phase and known amplitude. Target detection in a sequence of radar scans is reduced to the detection of target track.
Development of a two-step multi-scanning incoherent signal integration algorithm. Two-step integration method is applied to reduce the number of tracks. In the first stage the initial signals detection with a sufficiently high probability of false alarm is performed. In the second stage the tracking problem for selection target markers is solved and the multiscanning signal integration is implemented. It provides an optimal target detection solution over K surveys with low signal-to-noise ratio. Expressions for the correct target detection probability and false alarm incorporating quality track tracking are obtained.
Simulation results. Analysis of the algorithm is carried out as example of the little maneuvering target detection using the statistical modeling. The methods of calculating the output threshold (the cumulative statistics are compared on it) is presented.
Conclusions. Increasing the number of scans (in which the integration are performed) leads to a significant decreasing the probability of false alarm, which allows to increase the signal-to-noise ratio compared with the detection in a single scan up to 3.5 dB.
Keywords: target detection, pulse-Doppler radar, track-before-detect, signal integration.
Вісник Національного технічного університету України «КПІ» Серія — Радіотехніка. Радіоапаратобудування. — 2013. — №53
97
Импульсно-доплеровский радар — Pulse-Doppler radar
Антенна бортового импульсно-доплеровского радараИмпульсно-доплеровская РЛС является РЛС система , которая определяет диапазон до цели с использованием методов импульсной синхронизации, и использует эффект Доплера возвращенного сигнала , чтобы определить скорость целевого объекта. Он сочетает в себе функции импульсных радаров и радаров непрерывного излучения , которые ранее были разделены из-за сложности электроники .
Первый действующий импульсный доплеровский радар был в CIM-10 Bomarc , американской сверхзвуковой ракете большой дальности с прямоточными воздушно-реактивными двигателями, которая была вооружена ядерным оружием W40 для уничтожения целых групп атакующих самолетов противника. Впервые импульсно-доплеровские системы стали широко применяться на истребителях с 1960-х годов. Раньше радары использовали синхронизацию импульсов для определения дальности и угла антенны (или аналогичные средства) для определения пеленга. Однако это работало только тогда, когда антенна радара не была направлена вниз; в этом случае отражение от земли подавляло любые отражения от других объектов. Поскольку земля движется с той же скоростью, но в противоположном направлении от самолета, методы Доплера позволяют отфильтровать возврат земли, открывая воздушные суда и транспортные средства. Это дает возможность радаров импульсного доплеровского режима » смотреть вниз / сбивать «. Второстепенным преимуществом военных радаров является снижение передаваемой мощности при достижении приемлемых характеристик для повышения безопасности скрытого радара.
Это дает возможность радаров импульсного доплеровского режима » смотреть вниз / сбивать «. Второстепенным преимуществом военных радаров является снижение передаваемой мощности при достижении приемлемых характеристик для повышения безопасности скрытого радара.
Методы импульсного допплера также находят широкое применение в метеорологических радарах , позволяя радару определять скорость ветра по скорости любых атмосферных осадков. Импульсный доплеровский радар также является основой радаров с синтезированной апертурой, используемых в радиолокационной астрономии , дистанционном зондировании и картографировании. В управлении воздушным движением они используются для распознавания воздушных судов от беспорядка. Помимо вышеуказанных обычных приложений наблюдения, импульсный доплеровский радар успешно применяется в здравоохранении, например, для оценки риска падений и обнаружения падений, для медсестер или в клинических целях.
История
Самые ранние радарные системы не работали должным образом. Причина была связана с эффектами Доплера, которые ухудшают производительность систем, не предназначенных для учета движущихся объектов. Быстро движущиеся объекты вызывают сдвиг фазы в передаваемом импульсе, что может привести к гашению сигнала. Доплеровский режим имеет максимальное пагубное влияние на системы индикаторов движущихся целей , которые должны использовать обратный фазовый сдвиг для компенсации Доплера в детекторе.
Также было обнаружено, что эффекты доплеровской погоды (осадки) ухудшают работу обычных радаров и радаров-указателей движущихся целей, которые могут маскировать отражения самолетов. Это явление было адаптировано для использования с метеорологическими радиолокаторами в 1950-х годах после рассекречивания некоторых систем времен Второй мировой войны.
Импульсно-доплеровский радар был разработан во время Второй мировой войны для преодоления ограничений за счет увеличения частоты повторения импульсов . Это потребовало разработки клистрона , лампы бегущей волны и твердотельных устройств. Ранние импульсные доплеры были несовместимы с другими мощными устройствами микроволнового усиления, которые не были когерентными , но были разработаны более сложные методы, которые записывают фазу каждого переданного импульса для сравнения с отраженными эхо-сигналами .
Это потребовало разработки клистрона , лампы бегущей волны и твердотельных устройств. Ранние импульсные доплеры были несовместимы с другими мощными устройствами микроволнового усиления, которые не были когерентными , но были разработаны более сложные методы, которые записывают фазу каждого переданного импульса для сравнения с отраженными эхо-сигналами .
Ранние примеры военных систем включают AN / SPG-51 B, разработанные в 1950-х годах специально для работы в ураганных условиях без ухудшения характеристик.
Система управления огнем Hughes AN / ASG-18 была прототипом бортовой РЛС / комбинированной системы для планируемого североамериканского самолета-перехватчика XF-108 Rapier для ВВС США, а затем и для Lockheed YF-12 . Первый в США импульсный доплеровский радар, система имела возможность обзора / сбивания и могла отслеживать одну цель за раз.
Погода , солома , местность , техника полета и скрытность — распространенные тактики, используемые для сокрытия самолетов от радаров. Импульсно-доплеровский радар устраняет эти недостатки.
Использование импульсных доплеровских радаров на самолетах стало возможным после того, как в их конструкцию были включены цифровые компьютеры. К середине 1970-х годов импульсный доплеровский режим обеспечивал возможность обзора и сбивания для поддержки ракетных систем класса «воздух-воздух» на большинстве современных военных самолетов.
Принцип
Принцип импульсно-доплеровской РЛСИзмерение дальности
Принцип импульсного радараСистемы импульсного доплера измеряют расстояние до объектов, измеряя время, прошедшее между отправкой импульса радиоэнергии и получением отражения объекта. Радиоволны распространяются со скоростью света , поэтому расстояние до объекта — это прошедшее время, умноженное на скорость света, разделенную на два — туда и обратно.
Измерение скорости
Изменение длины волны, вызванное движением источника Импульсный доплеровский радар основан на эффекте Доплера , когда движение в диапазоне вызывает сдвиг частоты сигнала, отраженного от цели.
- Доплеровская частота знак равно 2 × частота передачи × лучевая скорость C . {\ displaystyle {\ text {Доплеровская частота}} = {\ frac {2 \ times {\ text {частота передачи}} \ times {\ text {лучевая скорость}}} {C}}.}
Радиальная скорость важна для работы импульсного доплеровского радара. В качестве отражателя перемещается между каждым передающим импульсом, возвращенный сигнал имеет фазовую разность или сдвиг по фазе , от импульса к импульсу. Это заставляет рефлектор производить доплеровскую модуляцию отраженного сигнала.
Радары с импульсным доплером используют это явление для улучшения характеристик.
Амплитуда последовательно возвращающегося импульса из одного и того же сканированного объема равна
- я знак равно я 0 грех ( 4 π ( Икс 0 + v Δ т ) λ ) знак равно я 0 грех ( Θ 0 + Δ Θ ) , {\ Displaystyle I = I_ {0} \ sin \ left ({\ frac {4 \ pi (x_ {0} + v \ Delta t)} {\ lambda}} \ right) = I_ {0} \ sin (\ Theta _ {0} + \ Delta \ Theta),}
где
- Икс 0 {\ displaystyle x_ {0}} расстояние от радара до цели,
- λ {\ displaystyle \ lambda} длина волны радара,
- Δ т {\ displaystyle \ Delta t} это время между двумя импульсами.
Так
- Δ Θ знак равно 4 π v Δ т λ . {\ displaystyle \ Delta \ Theta = {\ frac {4 \ pi v \ Delta t} {\ lambda}}.}
Это позволяет радару отделять отражения от нескольких объектов, расположенных в одном и том же объеме пространства, путем разделения объектов с использованием расширенного спектра для разделения различных сигналов:
- v знак равно целевая скорость знак равно λ Δ Θ 4 π Δ т , {\ displaystyle v = {\ text {целевая скорость}} = {\ frac {\ lambda \ Delta \ Theta} {4 \ pi \ Delta t}},}
где — фазовый сдвиг, вызванный дальним движением. Δ Θ {\ Displaystyle \ Delta \ Theta}
Преимущества
Скорость отклонения выбирается в системах обнаружения самолетов с импульсным доплеровским режимом, поэтому ничего ниже этой скорости обнаруживаться не будет. Луч антенны в один градус освещает миллионы квадратных футов местности на расстоянии 10 миль (16 км), и это дает тысячи обнаружений на горизонте или ниже горизонта, если доплеровский режим не используется.
Луч антенны в один градус освещает миллионы квадратных футов местности на расстоянии 10 миль (16 км), и это дает тысячи обнаружений на горизонте или ниже горизонта, если доплеровский режим не используется.
Импульсно-доплеровский радар использует следующие критерии обработки сигналов для исключения нежелательных сигналов от медленно движущихся объектов. Это также известно как отказ от беспорядка. Скорость отклонения обычно устанавливается чуть выше преобладающей скорости ветра (от 10 до 100 миль / час или от 15 до 150 км / час). Порог скорости намного ниже для метеорологического радара .
- | Доплеровская частота × C 2 × частота передачи | > порог скорости . {\ displaystyle \ left \ vert {\ frac {{\ text {Доплеровская частота}} \ times C} {2 \ times {\ text {частота передачи}}}} \ right \ vert> {\ text {порог скорости}} .}
В бортовом импульсном доплеровском радаре пороговое значение скорости компенсируется скоростью самолета относительно земли.
- | Доплеровская частота × C 2 × частота передачи — путевая скорость × потому что Θ | > порог скорости , {\ displaystyle \ left \ vert {\ frac {{\ text {Доплеровская частота}} \ times C} {2 \ times {\ text {частота передачи}}}} — {\ text {путевая скорость}} \ times \ cos \ Theta \ right \ vert> {\ text {порог скорости}},}
где — угловое смещение между положением антенны и траекторией полета самолета. Θ {\ displaystyle \ Theta}
Отражения от поверхности появляются почти на всех радарах. Земные помехи обычно появляются в круговой области в радиусе около 25 миль (40 км) вблизи наземного радара. Это расстояние намного больше в бортовых и космических радарах. Беспорядок возникает в результате отражения радиоэнергии от поверхности земли, зданий и растительности. Помехи включают погоду в радаре, предназначенном для обнаружения и сообщения о самолетах и космических кораблях.
Беспорядок создает уязвимую зону в радиолокационной станции с амплитудно-импульсной модуляцией во временной области .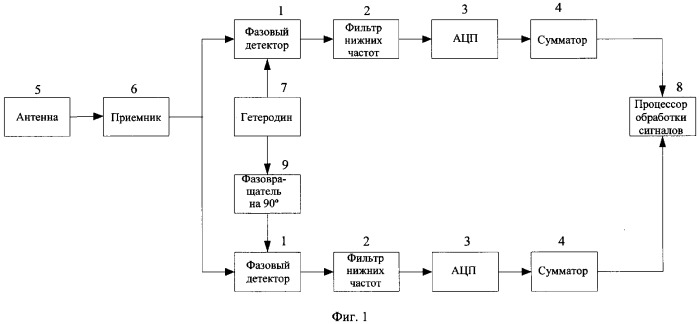 Недоплеровские радиолокационные системы нельзя направить прямо на землю из-за чрезмерного количества ложных тревог, которые перегружают компьютеры и операторов. Чтобы избежать перегрузки, необходимо снизить чувствительность вблизи беспорядка. Эта уязвимость начинается в области малой возвышенности на несколько лучей над горизонтом и простирается вниз. Это также существует во всем объеме движущегося воздуха, связанного с погодным явлением.
Недоплеровские радиолокационные системы нельзя направить прямо на землю из-за чрезмерного количества ложных тревог, которые перегружают компьютеры и операторов. Чтобы избежать перегрузки, необходимо снизить чувствительность вблизи беспорядка. Эта уязвимость начинается в области малой возвышенности на несколько лучей над горизонтом и простирается вниз. Это также существует во всем объеме движущегося воздуха, связанного с погодным явлением.
Импульсно-доплеровский радар исправляет это следующим образом.
- Позволяет направлять антенну радара прямо на землю, не перегружая компьютер и не снижая чувствительности.
- Заполняет область уязвимости, связанную с радаром во временной области с амплитудой импульса для обнаружения небольших объектов вблизи местности и погоды.
- Увеличивает дальность обнаружения на 300% или более по сравнению с индикацией движущихся целей (MTI) за счет улучшения видимости суб-помех.
Способность подавления помех около 60 дБ необходима для возможности обзора вниз / сбивания , и импульсный доплеровский режим является единственной стратегией, которая может удовлетворить это требование. Это устраняет уязвимости, связанные с окружающей средой на малых высотах и за горизонтом.
Сжатие импульсов и индикатор движущейся цели (MTI) обеспечивают видимость суб-помех до 25 дБ. Луч антенны MTI направлен над горизонтом, чтобы избежать чрезмерного количества ложных тревог, что делает системы уязвимыми. Самолеты и некоторые ракеты используют эту слабость с помощью техники, называемой полетом под радаром, чтобы избежать обнаружения ( Nap-of-the-earth ). Эта техника полета неэффективна против импульсного доплеровского радара.
Импульсный доплеровский режим дает преимущество при попытке обнаружить ракеты и летательные аппараты с низкой наблюдаемостью, летящие вблизи местности, морской поверхности и погодных условий.
Звуковой доплер и размер цели поддерживают пассивную классификацию типа транспортного средства, когда идентификация друга или врага недоступна по сигналу транспондера . Отраженные микроволновые сигналы со средней частотой повторения импульсов (PRF) находятся в диапазоне от 1500 до 15000 циклов в секунду, что является слышимым. Это означает, что вертолет звучит как вертолет, реактивный самолет — как реактивный самолет, а пропеллерный самолет — как пропеллеры. Самолет без движущихся частей издает звуковой сигнал. Фактический размер цели можно рассчитать с помощью звукового сигнала.
Отраженные микроволновые сигналы со средней частотой повторения импульсов (PRF) находятся в диапазоне от 1500 до 15000 циклов в секунду, что является слышимым. Это означает, что вертолет звучит как вертолет, реактивный самолет — как реактивный самолет, а пропеллерный самолет — как пропеллеры. Самолет без движущихся частей издает звуковой сигнал. Фактический размер цели можно рассчитать с помощью звукового сигнала.
Ущерб
Максимальный диапазон от отражательной способности (красный) и однозначного диапазона доплеровской скорости (синий) с фиксированной частотой повторения импульсов.Обработка неоднозначности требуется, когда целевой диапазон находится выше красной линии на графике, что увеличивает время сканирования.
Время сканирования является критическим фактором для некоторых систем, потому что транспортные средства, движущиеся со скоростью звука или выше, могут преодолевать одну милю (1,6 км) каждые несколько секунд, как Exocet , Harpoon , Kitchen и ракеты класса «воздух-воздух» . Максимальное время для сканирования всего объема неба должно составлять порядка десятка секунд или меньше для систем, работающих в этой среде.
Сам по себе импульсный доплеровский радар может работать слишком медленно, чтобы покрыть весь объем пространства над горизонтом, если не используется веерный луч. Этот подход используется с радаром наблюдения за воздушным пространством очень большого радиуса действия AN / SPS 49 (V) 5, который жертвует измерением высоты ради увеличения скорости.
Движение антенны импульсного доплера должно быть достаточно медленным, чтобы все обратные сигналы от как минимум 3 различных PRF могли быть обработаны до максимального ожидаемого диапазона обнаружения. Это известно как время пребывания . Движение антенны для импульсного допплера должно быть таким же медленным, как у радара, использующего MTI .
Поисковые радары с импульсным доплеровским режимом обычно работают в двух режимах, потому что наилучшие общие характеристики достигаются, когда импульсный доплеровский режим используется для областей с высокой частотой ложных тревог (горизонт или ниже и погода), тогда как обычный радар будет сканировать быстрее в свободном пространстве, где ложные частота тревог низкая (над горизонтом при чистом небе).
Тип антенны является важным фактором для многомодового радара, потому что нежелательный фазовый сдвиг, вносимый антенной радара, может ухудшить измерения характеристик для видимости суб-помех.
Обработка сигналов
Улучшение обработки сигналов с помощью импульсного доплеровского режима позволяет обнаруживать небольшие высокоскоростные объекты в непосредственной близости от больших медленно движущихся отражателей. Для этого передатчик должен быть когерентным и производить низкий фазовый шум в течение интервала обнаружения, а приемник должен иметь большой мгновенный динамический диапазон .
Обработка импульсного доплеровского сигнала также включает разрешение неоднозначности для определения истинной дальности и скорости.
Принятые сигналы от множества PRF сравниваются для определения истинного диапазона с использованием процесса разрешения неоднозначности диапазона.
Принятые сигналы также сравниваются с использованием процесса разрешения неоднозначности частоты.
Разрешение диапазона
Разрешение по дальности — это минимальное расстояние между двумя объектами, движущимися с одинаковой скоростью, прежде чем радар сможет обнаружить два дискретных отражения:
- разрешение по дальности знак равно C PRF × ( количество выборок между импульсами передачи ) . {\ displaystyle {\ text {разрешение диапазона}} = {\ frac {C} {{\ text {PRF}} \ times ({\ text {количество выборок между импульсами передачи}})}}.}
В дополнение к этому пределу выборки длительность переданного импульса может означать, что сигналы от двух целей будут приниматься одновременно от разных частей импульса.
Разрешение скорости
Разрешение по скорости — это минимальная разница радиальных скоростей между двумя объектами, движущимися на одном и том же расстоянии, прежде чем радар сможет обнаружить два дискретных отражения:
- разрешение по скорости знак равно C × PRF частота передачи × размер фильтра в передаваемых импульсах .
 {\ displaystyle {\ text {разрешение скорости}} = {\ frac {C \ times {\ text {PRF}}} {{\ text {частота передачи}} \ times {\ text {размер фильтра в передаваемых импульсах}}} }.}
{\ displaystyle {\ text {разрешение скорости}} = {\ frac {C \ times {\ text {PRF}}} {{\ text {частота передачи}} \ times {\ text {размер фильтра в передаваемых импульсах}}} }.}
Особое внимание
РЛС с импульсным доплеровским спектрометром предъявляет особые требования, которые должны быть выполнены для достижения приемлемых характеристик.
Частота следования импульсов
Импульсный допплер обычно использует среднюю частоту повторения импульсов (PRF) примерно от 3 до 30 кГц. Диапазон между передаваемыми импульсами составляет от 5 км до 50 км.
Дальность и скорость не могут быть измерены напрямую с использованием средней частоты повторения импульсов, и для определения истинной дальности и скорости требуется разрешение неоднозначности. Доплеровские сигналы обычно выше 1 кГц, что является слышимым, поэтому аудиосигналы от систем со средней частотой повторения импульсов могут использоваться для классификации пассивных целей.
Угловое измерение
Радиолокационные системы требуют углового измерения. Транспондеры обычно не связаны с импульсным доплеровским радаром, поэтому для практической работы требуется подавление боковых лепестков.
Радиолокационные системы слежения используют угловую погрешность для повышения точности, производя измерения перпендикулярно лучу антенны радара. Угловые измерения усредняются за промежуток времени и объединяются с радиальным перемещением для получения информации, пригодной для прогнозирования положения цели на короткое время в будущем.
В радаре слежения используются два метода угловой ошибки: моноимпульсное и коническое сканирование.
Согласованность
Для импульсного доплеровского радара необходим когерентный генератор с очень низким уровнем шума. Фазовый шум снижает видимость суб-помех, создавая видимое движение на неподвижных объектах.
Резонаторный магнетрон и усилитель со скрещенными полями не подходят, потому что шум, создаваемый этими устройствами, влияет на качество обнаружения. Единственными устройствами усиления, подходящими для импульсного допплера, являются клистрон , лампа бегущей волны и твердотельные устройства.
Единственными устройствами усиления, подходящими для импульсного допплера, являются клистрон , лампа бегущей волны и твердотельные устройства.
Гребешок
Обработка импульсного доплеровского сигнала представляет собой явление, называемое гребешком. Название связано с серией дыр, которые вычерпываются из-за возможности обнаружения.
Волнистость для импульсного доплеровского радара включает слепые скорости, создаваемые фильтром подавления помех. Каждый объем пространства необходимо сканировать с использованием 3 или более различных PRF. Схема обнаружения с двумя частями повторения импульсов будет иметь промежутки обнаружения с набором дискретных диапазонов, каждый из которых имеет слепую скорость.
Окно
Звонящие артефакты создают проблему с поиском, обнаружением и разрешением неоднозначности в импульсном доплеровском радаре.
Звон снижается двумя способами.
Во-первых, форма передаваемого импульса регулируется для сглаживания переднего и заднего фронтов, так что РЧ-мощность увеличивается и уменьшается без резких изменений. Это создает передающий импульс с гладкими концами вместо прямоугольной волны, что уменьшает явление звона, которое в противном случае связано с отражением от цели.
Во-вторых, форма принимаемого импульса регулируется с помощью оконной функции, которая сводит к минимуму звон, который возникает каждый раз, когда импульсы применяются к фильтру. В цифровой системе это регулирует фазу и / или амплитуду каждой выборки, прежде чем она будет применена к быстрому преобразованию Фурье . Окно Дельфа-Чебышева является наиболее эффективным, поскольку оно создает ровный технологический пол без звона, который в противном случае мог бы вызвать ложные срабатывания.
Антенна
Импульсный доплеровский радар обычно ограничивается антеннами с механическим наведением и активной фазовой решеткой.
Механические радиочастотные компоненты, такие как волновод, могут вызывать доплеровскую модуляцию из-за фазового сдвига, вызванного вибрацией. {\ frac {\ text {SCV}} {20}} \ times S \ times {\ text {PRF}}}},}
{\ frac {\ text {SCV}} {20}} \ times S \ times {\ text {PRF}}}},}
где
- T = время установления фазовращателя,
- SCV = видимость суб-препятствий в дБ ,
- S = количество выборок диапазона между каждым импульсом передачи,
- PRF = максимальная расчетная частота повторения импульсов.
Тип антенны и характеристики сканирования являются практическим соображением для многомодовых радиолокационных систем.
Дифракция
Неровные поверхности, такие как волны и деревья, образуют дифракционную решетку, подходящую для искажения микроволновых сигналов. Импульсный допплер может быть настолько чувствительным, что дифракцию от гор, зданий или вершин волн можно использовать для обнаружения быстро движущихся объектов, которые в противном случае блокируются твердыми препятствиями на линии обзора. Это явление с очень большими потерями становится возможным только тогда, когда радар имеет значительную избыточную видимость суб-помех.
Преломление и воздуховод используют частоту передачи в L-диапазоне или ниже для увеличения горизонта, что сильно отличается от дифракции. Преломление для загоризонтного радара использует переменную плотность в воздушном столбе над поверхностью земли для искажения радиочастотных сигналов. Инверсионный слой может создать переходной тропосферный канал, который улавливает радиочастотные сигналы в тонком слое воздуха, как волновод.
Видимость субклатера
Видимость субклаттера предполагает максимальное отношение мощности препятствия к мощности цели, которое пропорционально динамическому диапазону. Это определяет производительность в плохую погоду и у поверхности земли.
- динамический диапазон знак равно мин { мощность несущей мощность шума шум передачи, где полоса пропускания PRF размер фильтра 2 биты выборки + размер фильтра динамический диапазон приемника . {\ displaystyle {\ text {динамический диапазон}} = \ min {\ begin {cases} {\ tfrac {\ text {carrier power}} {\ text {noise power}}} & {\ text {шум передачи, где полоса пропускания is}} {\ tfrac {\ text {PRF}} {\ text {размер фильтра}}} \\ 2 ^ {{\ text {sample bits}} + {\ text {размер фильтра}}} & {\ text { динамический диапазон приемника}} \ end {cases}}.
 {\ frac {1} {4}},}
{\ frac {1} {4}},}
где
- R = расстояние до цели,
- P t = мощность передатчика,
- G t = усиление передающей антенны,
- A r = эффективная апертура (площадь) приемной антенны,
- σ = поперечное сечение радара или коэффициент рассеяния цели,
- F = коэффициент распространения диаграммы направленности антенны ,
- D = размер доплеровского фильтра (импульсы передачи в каждом быстром преобразовании Фурье ),
- K b = постоянная Больцмана ,
- T = абсолютная температура,
- B = полоса пропускания приемника (полосовой фильтр) ,
- N = коэффициент шума .
Это уравнение получено путем объединения уравнения радара с уравнением шума и учетом в полосе распределения шума на несколько фильтров обнаружения. Значение D добавляется к стандартному уравнению дальности действия радара для учета как обработки импульсно-доплеровского сигнала, так и уменьшения ЧМ-шума передатчика .
Дальность обнаружения увеличивается пропорционально корню четвертой степени из числа фильтров для данной потребляемой мощности. В качестве альтернативы потребление энергии сокращается на количество фильтров для заданного диапазона обнаружения.
Обработка импульсно-доплеровского сигнала объединяет всю энергию всех отдельных отраженных импульсов, которые попадают в фильтр. Это означает, что система обработки импульсного доплеровского сигнала с 1024 элементами обеспечивает улучшение на 30,103 дБ из-за типа обработки сигнала, который должен использоваться с импульсным доплеровским радаром. Энергия всех отдельных импульсов от объекта складывается в процессе фильтрации.
Обработка сигнала 1024-точечным фильтром улучшает характеристики на 30,103 дБ при условии совместимости передатчика и антенны. Это соответствует увеличению максимальной дистанции на 562%.
Это соответствует увеличению максимальной дистанции на 562%.
Эти усовершенствования являются причиной того, что импульсный доплер необходим для военной и астрономии.
Использование слежения за самолетами
Импульсно-доплеровский радар обнаружения самолетов имеет два режима.
- Сканировать
- Отслеживать
Режим сканирования включает частотную фильтрацию, определение порога амплитуды и разрешение неоднозначности. Как только отражение обнаружено и разрешено , импульсный доплеровский радар автоматически переходит в режим слежения за объемом пространства, окружающего трассу.
Режим отслеживания работает как петля фазовой автоподстройки частоты , где доплеровская скорость сравнивается с перемещением диапазона при последовательных сканированиях. Блокировка указывает на то, что разница между двумя измерениями ниже порогового значения, которое может иметь место только с объектом, который удовлетворяет механике Ньютона . Другие типы электронных сигналов не могут произвести блокировку. Блокировка отсутствует ни в одном другом радаре.
В критерии блокировки потребность должна быть удовлетворена во время нормальной работы.
Блокировка устраняет необходимость вмешательства человека, за исключением вертолетов и электронных помех .
Явления погоды подчиняются адиабатическим процессам, связанным с воздушными массами, а не ньютоновской механикой , поэтому критерии блокировки обычно не используются для метеорологических радиолокаторов.
Обработка импульсного доплеровского сигнала выборочно исключает отражения с низкой скоростью, так что не происходит обнаружения скорости ниже пороговой. Это устраняет препятствия на местности, погодных условиях, биологические и механические помехи, за исключением самолетов-ловушек.
Доплеровский сигнал цели от обнаружения преобразуется из частотной области обратно в звук во временной области для оператора в режиме отслеживания в некоторых радиолокационных системах. Оператор использует этот звук для пассивной классификации целей, например для распознавания вертолетов и электронных помех.
Оператор использует этот звук для пассивной классификации целей, например для распознавания вертолетов и электронных помех.
Вертолеты
Особое внимание необходимо уделить самолетам с большими движущимися частями, поскольку импульсный доплеровский радар работает как контур фазовой автоподстройки частоты . Кончики лезвий, движущиеся со скоростью, близкой к скорости звука, производят единственный сигнал, который может быть обнаружен, когда вертолет медленно движется вблизи местности и погодных условий.
Вертолеты выглядят как быстро пульсирующие излучатели шума, за исключением ясного окружения, свободного от помех. Звуковой сигнал выдается для пассивной идентификации типа находящегося в воздухе объекта. Микроволновый доплеровский сдвиг частоты, вызванный движением рефлектора, попадает в диапазон слышимого звука для людей ( 20-20 000 Гц ), который используется для классификации целей в дополнение к видам обычных радиолокационных дисплеев, используемых для этой цели, например A-scope, B -scope, C-scope и индикатор RHI. Человеческое ухо может уловить разницу лучше, чем электронное оборудование.
Требуется специальный режим, поскольку информация обратной связи по доплеровской скорости должна быть отключена от радиального движения, чтобы система могла переходить от сканирования к треку без блокировки.
Подобные методы требуются для получения информации о треке для сигналов глушения и помех, которые не могут удовлетворять критериям захвата.
Многорежимный
Импульсный доплеровский радар должен быть многорежимным, чтобы управлять траекторией поворота и пересечения самолета.
Находясь в режиме трека, импульсный доплеровский радар должен включать способ изменения доплеровской фильтрации для объема пространства, окружающего трек, когда радиальная скорость падает ниже минимальной скорости обнаружения. Регулировка доплеровского фильтра должна быть связана с функцией радиолокационного трека, чтобы автоматически регулировать скорость отклонения доплеровского сигнала в объеме пространства, окружающего трек.
Слежение прекратится без этой функции, потому что в противном случае сигнал цели будет отклонен доплеровским фильтром, когда радиальная скорость приближается к нулю, потому что нет изменения частоты.
Многорежимная работа может также включать в себя непрерывную волновую подсветку для полуактивного радиолокационного самонаведения .
Смотрите также
Внешние ссылки
Рекомендации
Библиография
- Пейс, Стив (1991). X-Fighters: экспериментальные и опытные истребители ВВС США, от XP-59 до YF-23 . Сент-Пол, Миннесота: Motorbooks International. ISBN 0-87938-540-5 .
Устройство цифровой обработки сигналов в импульсно-доплеровской РЛС с компенсацией миграции целей по дальности
Изобретение относится к области радиолокации и предназначено для использования в импульсно-доплеровских (ИД) радиолокационных станциях (РЛС), работающих с высокой частотой повторения импульсов. Достигаемый технический результат — увеличение отношения сигнал-шум, повышение разрешения по дальности и скорости высокоскоростных целей. Указанный результат достигается за счет того, что устройство содержит цифровой формирователь квадратурных составляющих, согласованный фильтр, процессор быстрого преобразования Фурье (БПФ), формирователь матрицы спектров, поэлементный умножитель матриц, процессор обратного БПФ, вычислитель фазовых множителей, формирователь матрицы фазовых множителей, а также формирователь дальностно-временного портрета, формирователь дальностно-частотного портрета и вычислитель модуля. Перечисленные средства определенным образом соединены между собой.Устройство цифровой обработки сигналов в
импульсно-доплеровской РЛС с компенсацией миграции целей по дальности,
содержащее последовательно соединенные цифровой формирователь квадратурных
составляющих, вход которого является первым входом устройства, и согласованный
фильтр, и последовательно подключенные формирователь дальностно-временного
портрета, формирователь дальностно-частотного портрета и вычислитель модуля,
выход которого является выходом устройства, отличающееся тем, что введены
последовательно соединенные процессор БПФ, формирователь матрицы спектров,
поэлементный умножитель матриц и процессор обратного БПФ, а также вычислитель
фазовых множителей и формирователь матрицы фазовых множителей; причем выход
согласованного фильтра связан со входом процессора БПФ, выход процессора
обратного БПФ подключен ко входу формирователя дальностно-временного портрета,
а второй вход устройства связан со входом вычислителя фазовых множителей, выход
которого соединен со входом формирователя матрицы фазовых множителей, выход
которого подключен ко второму входу поэлементного умножителя матриц.
Patent number / Номер патента
2673679IPC number / Номер по МПК
МПК • G01S 13/53 (2006.01) • G06F 17/14 (2006.01) СПК • G01S 13/53 (2006.01) • G01S 13/5244 (2006.01) • G01S 7/41 (2006.01) • G06F 17/14 (2006.01)Patent holder / Патентообладатель
Southern Federal University ФГАОУ «Южный федеральный университет» ПАО «Авиационная холдинговая компания «Сухой», АО «Научно-исследовательский институт приборостроения имени В.В. Тихомирова»Date of filing / Дата приоритета
17/10/2017Date of registration / Дата регистрации
29/11/2018Patent duration / Срок действия
17/10/2037Link for inquiries / Ссылка для запросов об использовании
radar-авиационные РЛС
РЛС бокового обзора на КА «Океан-О»
Многозональное сканирующее устройство малого разрешения МСУ-М на КА «Океан-О» российско-украинский, оперативный контроль мирового океана
Подробнее
РЛС «Кадмий»
Обеспечивала защиту бомбардировщика Ту-4 от истребителей 1945 г разработки
Подробнее
Бортовая РЛС «Копье»
На самолете МИГ-21бис установлена многофункциональная БРЛС «Копье», позволяющая обнаруживать и поражать воздушные цели всх типов круглосуточно и в любых условиях, а также наземные цели, в том числе вне их визуальной видимости.
Важное отличие Су-39 от реактивных штурмовиков первого поколения — наличие на борту радиолокационного прицельного комплекса. При работе по земле, импульсно-доплеровская РЛС «Копье» обеспечивает всепогодность и круглосуточность применения самолета и выдачу предварительного целеуказания. Так, движущаяся по лесной дороге колонна танков обнаруживается на дальности свыше 20 км, железнодорожный мост — 100 км.
БРЛС «Копье» обеспечивает применение:
 Центральная вычислительная управляющая система .
Центральная вычислительная управляющая система .
Подробнее
РЛС многоспектрального дистанционного наблюдения на самолете ИЛ — 20M
В РЛС реализован радиолокационный боковой обзор местности
Длина волны 3 см
Разрешение: вдоль линии полета 12 м, поперек полета 15 м
Полосы бокового обзора: 15, 50 и 100 км
Подробнее
Радиолокационная станция бокового обзора с синтезированной апертурой «РОНСАР»
Используется в качестве аппаратуры радиолокационного (РЛ) наблюдения для программы «Открытое небо», позволяет получать РЛ-изображение местности в реальном масштабе времени на борту самолета и на наземном пункте приема и обработки информации. Рынок сбыта: страны Европы
Подробнее
РЛС «Сапфир-21» МиГ-21
РЛС управления вооружением, разработка 1955 г
Подробнее
РЛС «Сапфир-23» для истребителя МиГ-23
Подробнее
РЛС «Селен» бомбардировщика Ту-4
РЛС обеспечивала защиту бомбардировщика Ту-4 от истребителей 1945 г разработки
Подробнее
РЛС «Смерч» для бомбардировщика Ту-4
РЛС «Смерч» (первоначальное название «Ураган-5Б-80») для самолета-перехватчика Ту-128
Подробнее
РЛС «Смерч-А2» для истребителя МиГ-25
РЛС «Смерч-А2» для истребителя МиГ-25 разработана в кратчайшие сроки в 1970 году принята на вооружение
Подробнее
Многоцелевая РЛС «Смерч-100» для истребителя МиГ-31
Многоцелевая РЛС «Смерч-100» для истребителя МиГ-31 создана в1968-1969 г
Подробнее
РЛС «Сокол»
РЛС «Сокол» создана 1955-1958 московской группой при опытном заводе 339, преобразованном в НИИ Фазатрон в 1962 г
Подробнее
РЛС «Тайфун-М» истребителя Су-15М
РЛС «Тайфун-М» разработана на базе РЛС «Смерч-А». Разроаботка началась в 1969 году для новой системы вооружения истребителя Су-15М принята на вооружение после испытаний в 1976-1977
Разроаботка началась в 1969 году для новой системы вооружения истребителя Су-15М принята на вооружение после испытаний в 1976-1977
Подробнее
Бортовая РЛС «Ураган-5Б» для истребителей
Подробнее
РЛС «Орион-А» переднего обзора Су-24
Упоминание
РЛС предупреждения о столкновении при следовании рельефу местности «Рельеф» Су-24
Упоминание
Пассивный радиолокационный пеленгатор «Фидин» Су-24
Упоминание
Радиовысотомер малых высот РВ-ЗМ Су-24
Упоминание
Радиовысотомер больших высот РВ-18А-1 Су-24
Упоминание
Доплеровский измеритель скорости и угла сноса ДИСС-7 Су-24
Упоминание
Радилокатор с синтезированной апертурой «Маяк»
Использовался для составления электроннызх карт местности, по котором создавалась система навигации БР
Упоминание
Радилокатро с синтезированной апертурой «Кант»
Космический РСА «Кант» устанавливался на КК «Прогресс-19», «Прогресс-22» и функционировал в составе станции «Салют-7».
Упоминание
РЛС «Инициатива»
Вертолетный радиолокатор.
Упоминание
РЛС «Жук-М»
Бортовая РЛС МИГ-29СМТ.
Весной 2001 г Китай проводил испытания БРЛС для оснащения истребителя F8-IIМ. БРЛС, разработанная и изготовленная корпорацией «Фазотрон-НИИР» (г.Москва), сопряжена со всеми бортовыми системами истребителя, в том числе с управляемым оружием. Всего проведено более 50 полетов, которые полностью подтвердили соответствие заявленным характеристикам БРЛС на всех режимах, в том числе по боевому применению ракет российского производства. В ходе испытаний отмечена высокая разрешающая способность радара при картографировании местности. Средняя дальность обнаружения самолета-цели составила 70 км на встречных курсах и 50 км вдогон (при ЭПР=3 м2). Показана возможность обеспечения боевого применения ракет при максимальной скорости сближения с целью.
В ходе испытаний отмечена высокая разрешающая способность радара при картографировании местности. Средняя дальность обнаружения самолета-цели составила 70 км на встречных курсах и 50 км вдогон (при ЭПР=3 м2). Показана возможность обеспечения боевого применения ракет при максимальной скорости сближения с целью.
Упоминание
Подробнее
РЛС «Арбалет»
Подробнее
РЛС «Фараон»
Семейство РЛС с ФАР
Подробнее
РЛС «Москит»
Подробнее
РЛС «Барс»
РЛС управления оружием
Подробнее
РЛС «Оса»
РЛ прицел
Подробнее
РЛС «Альфа-Ф»
РЛС корабельного вертолета Ка-28
Дополните и/или уточните материал.
[email protected]Дальность радара истребителей Gripen увеличили вдвое
Фотография: Saab
Шведская компания Saab объявила о завершении работ по созданию модернизированной радиолокационной станции PS-05/A Mk.4 для истребителей Gripen. Как сообщает Flightglobal, новая версия радара отличается от предыдущей вдвое большей дальностью обнаружения целей. Для PS-05/A Mk.3 этот показатель составляет 120 километров.
Модернизация радара была произведена за счет установки двух новых сменных линейных блоков с обновленным программным обеспечением и модернизированными приемо-передатчиками. По данным Saab, дальнейшее совершенствование этих блоков позволит повысить дальность обнаружения целей импульсно-доплеровским радаром PS-05/A еще на 50 процентов. Это усовершенствование будет готово к 2017 году.
По данным Saab, дальнейшее совершенствование этих блоков позволит повысить дальность обнаружения целей импульсно-доплеровским радаром PS-05/A еще на 50 процентов. Это усовершенствование будет готово к 2017 году.
Благодаря увеличению дальности действия радара PS-05/A истребители Gripen смогут теперь использовать все возможности ракет AIM-120 AMRAAM и Meteor класса «воздух-воздух». Кроме того, благодаря модернизированному радару истребители Gripen смогут обнаруживать вертолеты в режиме висения, а также истребители с малой эффективной площадью рассеяния на большем расстоянии.
Масса радара PS-05/A составляет 156 килограммов, из которых 73 килограмма приходятся на систему жидкостного охлаждения. Импульсно-доплеровская радиолокационная станция выполнена по модульной схеме, что позволяет проводить ее модернизацию простой заменой линейных блоков.
Радары на борту: как работает радиолокатор и для чего нужна АФАР?: uacrussia — LiveJournal
Фото Михаила Полякова
Сегодня авиация немыслима без радаров. Бортовая радиолокационная станция (БРЛС) является одним из самых важных элементов радиоэлектронного оборудования современного летательного аппарата. По мнению экспертов, в скором будущем БРЛС останутся основным средством обнаружения, сопровождения целей и наведения на них управляемого оружия.
Мы попытаемся ответить на самые распространенные вопросы о работе РЛС на борту и рассказать, как создавались первые радары и чем смогут удивить перспективные радиолокационные станции.
1. Когда появились первые радары на борту?
К идее использования радиолокационных средств на самолетах пришли несколько лет спустя после того, как появились первые наземные РЛС. У нас в стране прототипом первой БРЛС стала наземная станция «Редут».
Одной из основных проблем стало размещение аппаратуры на самолете – комплект станции с источниками питания и кабелями весил примерно 500 кг. На одноместном истребителе того времени установить такую аппаратуру было нереально, поэтому станцию было решено разместить на двухместном Пе-2.
Первая отечественная бортовая радиолокационная станция под названием «Гнейс-2» была принята на вооружение в 1942 году. В течение двух лет было выпущено более 230 станций «Гнейс-2». А в победном 1945 году «Фазотрон-НИИР» начал серийный выпуск самолетной радиолокационной станции «Гнейс-5с». Дальность обнаружения цели достигала 7 км.
За рубежом первая авиационная РЛС «AI Mark I» – британская – была передана на вооружение немного раньше, в 1939 году. Из-за большого веса ее устанавливали на тяжелые истребители-перехватчики Bristol Beaufighter. В 1940 году на вооружение поступила новая модель – «AI Mark IV». Она обеспечивала обнаружение целей на дальности до 5,5 км.
2. Из чего состоит бортовая РЛС?
Конструктивно БРЛС состоит из нескольких съемных блоков, расположенных в носовой части самолета: передатчика, антенной системы, приемника, процессора обработки данных, программируемого процессора сигналов, пультов и органов управления и индикации.
Сегодня практически у всех бортовых РЛС антенная система представляет собой плоскую щелевую антенную решетку, антенну Кассегрена, пассивную или активную фазированную антенную решетку.
Современные БРЛС работают в диапазоне различных частот и позволяют обнаруживать воздушные цели с ЭПР (Эффективная площадь рассеяния) в один квадратный метр на дальности в сотни километров, а также обеспечивают сопровождение на проходе десятки целей.
Кроме обнаружения целей, сегодня БРЛС обеспечивают радиокоррекцию, полетное задание и выдачу целеуказания на применение управляемого бортового оружия, осуществляют картографирование земной поверхности с разрешением до одного метра, а также решают вспомогательные задачи: следование рельефу местности, измерение собственной скорости, высоты, угла сноса и другие.
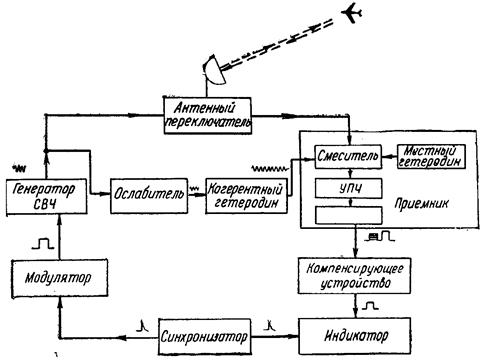
3. Как работает бортовой радиолокатор?
Сегодня на современных истребителях используются импульсно-доплеровские РЛС. В самом названии описан принцип действия такой радиолокационной станции.
Радиолокационная станция работает не непрерывно, а периодическими толчками – импульсами. В сегодняшних локаторах посылка импульса длится всего лишь несколько миллионных долей секунды, а паузы между импульсами – несколько сотых или тысячных долей секунды.
Встретив на пути своего распространения какое-либо препятствие, радиоволны рассеиваются во все стороны и отражаются от него обратно к радиолокационной станции. При этом, передатчик радара автоматически выключается, и начинает работать радиоприемник.
Одной из основных проблем импульсных РЛС является избавление от сигнала, отражающегося от неподвижных объектов. Например, для бортовых РЛС проблема в том, что отражение от земной поверхности затеняет все объекты, лежащие ниже самолета. Эти помехи устраняют, используя эффект Доплера, согласно которому частота волны, отраженной от приближающегося объекта, увеличивается, а от уходящего объекта – уменьшается.
4. Что означают Х, К, Ка и Кu диапазоны в характеристиках РЛС?
Сегодня диапазон длин волн, в котором работают бортовые радиолокационные станции чрезвычайно широк. В характеристиках РЛС диапазон станции указывается латинскими буквами, к примеру, Х, К, Ка или Кu.
Например, РЛС «Ирбис» с пассивной фазированной антенной решеткой, установленная на истребителе Су-35, работает в X-диапазоне. При этом дальность обнаружения воздушных целей «Ирбиса» достигает 400 км.
X-диапазон широко используется в радиолокации. Он простирается от 8 до 12 ГГц электромагнитного спектра, то есть это длины волн от 3,75 до 2,5 см. Почему он назван именно так? Есть версия, что во время Второй Мировой войны диапазон был засекречен и поэтому получил название X-диапазона.
Все названия диапазонов с латинской буквой К в названии имеют менее загадочное происхождение – от немецкого слова kurz («короткий»). Этот диапазон соответствует длинам волн от 1,67 до 1,13 см. В сочетании с английскими словами above и under, свои названия получили диапазоны Ka и Ku, соответственно находящиеся «над» и «под» K-диапазоном.
Радары Ka-диапазона способны работать на коротких расстояниях и производить измерения сверхвысокого разрешения. Такие радиолокаторы часто применяются для управления воздушным движением в аэропортах, где с помощью очень коротких импульсов – длиной в несколько наносекунд – определяется дистанция до самолета.
Часто Ка-диапазон используется в вертолетных радарах.
Таким образом, каждый диапазон имеет свои преимущества и в зависимости от условий размещения и задач, БРЛС работает в различных диапазонах частот. Например, получение высокой разрешающей способности в переднем секторе обзора реализует Ка-диапазон, а увеличение дальности действия БРЛС делает возможным Х-диапазон.
5. Что такое ФАР?
Очевидно, для того чтобы принимать и излучать сигналы, любому радару нужна антенна. Чтобы уместить ее в самолет, придумали специальные плоские антенные системы, а приемник и передатчик находятся за антенной. Чтобы увидеть разные цели радаром, антенну нужно двигать. Так как антенна радара достаточно массивная, двигается она медленно. При этом, становится проблематична одновременная атака нескольких целей, ведь радар с обычной антенной держит в «поле зрения» только одну цель.
Современная электроника позволила отказаться от такого механического сканирования в БРЛС. Устроено это следующим образом: плоская (прямоугольная или круглая) антенна разделена на ячейки. В каждой такой ячейке находится специальный прибор – фазовращатель, который может на заданный угол изменять фазу электромагнитной волны, которая попадает в ячейку. Обработанные сигналы из ячеек поступают на приемник. Именно так можно описать работу фазированной антенной решетки (ФАР).
А если точнее, подобная антенная решетка со множеством элементов-фазовращателей, но с одним приемником и одним передатчиком называется пассивной ФАР. Кстати, первый в мире истребитель, оснащенный радиолокатором с пассивной ФАР, – наш российский МиГ-31. На нем была установлена РЛС «Заслон» разработки НИИ приборостроения им. Тихомирова.
6. Для чего нужна АФАР?
Активная фазированная антенная решетка (АФАР) является следующим этапом в развитии пассивной. В такой антенне каждая ячейка решетки содержит свой приемопередатчик. Их количество может превысить одну тысячу. То есть, если традиционный локатор – это отдельные антенна, приемник, передатчик, то в АФАР приемник с передатчиком и антенна «рассыпаются» на модули, каждый из которых содержит щель антенны, фазовращатель, передатчик и приемник.
Раньше, если, например, вышел из строя передатчик, самолет становился «слепым». Если в АФАР будут поражены одна-две ячейки, даже десяток, остальные продолжают работать. В этом и есть ключевое преимущество АФАР. Благодаря тысячам приемникам и передатчикам повышается надежность и чувствительность антенны, а также появляется возможность работать на нескольких частотах сразу.
Но главное, что структура АФАР позволяет РЛС параллельно решать несколько задач. Например, не только обслуживать десятки целей, но и параллельно с обзором пространства очень эффективно защищаться от помех, ставить помехи радарам противника и картографировать поверхность, получая карты высокого разрешения.
7. Какая РЛС будет на истребителе пятого поколения ПАК ФА?
Среди перспективных разработок – конформные АФАР, которые смогут вписываться в фюзеляж летательного аппарата, а также так называемая «умная» обшивка планера. В истребителях следующего поколения она станет как бы единым приемо-передающим локатором, предоставляющим пилоту полную информацию о происходящем вокруг самолета.
Радиолокационная система ПАК ФА состоит из перспективной АФАР X-диапазона в носовом отсеке, двух радаров бокового обзора, а также АФАР L-диапазона вдоль закрылков.
Фотонные технологии позволят расширить возможности радара – снизить массу более чем вдвое, а разрешающую способность увеличить в десятки раз. Такие БРЛС с радиооптическими фазированными антенными решетками способны делать своеобразный «рентгеновский снимок» самолетов, находящихся на удалении более 500 километров, и давать их детализированное, объемное изображение. Эта технология позволяет заглянуть внутрь объекта, узнать, какую технику он несет, сколько людей в нем находится, и даже разглядеть их лица.
Материалы опубликованы порталом Новости ВПК
Когерентная обработка радиолокационных сигналов: история, состояние и перспективы.
В. Г. Бартенев
Представлен обзор развития когерентной техники в радиолокации почти за 70 лет. Основное внимание уделено первым как отечественным, так и зарубежным когерентным системам с аналоговой и цифровой реализацией. Акцент сделан на перспективное развитие программируемых адаптивных когерентных систем на ПЛИС и DSP.
Введение.
Некоторые историки утверждают, что до 1943 г. в СССР радиолокации не было, и лишь с появлением Постановления 1943 г. № ГОКО-368600 был создан Совет по радиолокации при Государственном Комитете Обороны. Эту дату они называют днем рождения отечественной радиолокации. Конечно, это не так. И это утверждение полностью опровергается историей создания еще к началу Великой Отечественной войны Службы воздушного наблюдения, в состав которой входили отечественные РЛС дальнего обнаружения РУС-2 и РУС-2с, созданные в НИИ-20 (ныне ВНИИРТ) [1].
Тем не менее, нельзя не отметить важность сталинского постановления «О радиолокации», которому исполнилось немногим более 70 лет. Постановление вышло в год коренного перелома в Великой Отечественной войне после победы Красной армии в Сталинградской битве и накануне Курской битвы, в которой также была одержана победа. В это же время англичане в своей борьбе против фашистской Германии пошли на беспрецедентный шаг. Ими впервые был применен новый вид оружия: в Гамбурге был осуществлен массовый сброс пассивных помех против немецких РЛС [2]. Это событие серьезным образом повлияло на реализацию постановления «О радиолокации» и на интенсивное развитие отечественной радиопромышленности в целом.
Пассивные помехи над Гамбургом.
Поздним вечером 24 июля 1943 г. немецкая РЛС «Wuerzburg» в Остенде обнаружила группу британских самолетов, приближающуюся со стороны Северного моря. РЛС в Гамбурге также обнаружила группу противника и сообщила об этом в штаб соответствующего командования. Это было их последним наблюдением целей, потому что внезапно количество ответных сигналов целей на экранах всех РЛС, к изумлению операторов, непропорционально увеличилось, и операторы не могли понять, действительно ли в налете участвуют тысячи самолетов. В конце концов они сообщили, что их РЛС работают неверно и запросили инструкций.
Тем временем, группа самолетов англичан почти достигла предместий Гамбурга, поскольку немецкие батареи и эскадрильи истребителей не смогли отреагировать на угрозу из-за отсутствия команд наведения от своих РЛС. Частично скрытая чем-то, чего немцы не могли понять, огромная группа самолетов, состоявшая из 718 четырехмоторных и 73 двухмоторных бомбардировщиков, без какого-либо сопротивления, достигла центра города. Командование ПВО Гамбурга из-за недостатка информации отдало приказ вести стрельбу по бомбардировщикам вслепую. Однако, достигнув своих целей, они успешно выполнили один из наиболее ужасных в истории воздушных налетов.
Пассивные помехи оказались простым, но эффективным средством, которое впервые было применено против немецких РЛС «Wuerzburg». Постановка пассивных помех заключалась в выбросе из самолета тонких полосок фольги определенной длины. Чтобы эффективно подавить РЛС противника длина полоски фольги соответствовала половине рабочей длины волны РЛС. Выбрасываемые пачками, которые затем раскрывались, полоски фольги создавали ответные сигналы целей на экранах РЛС и скрывали ответные сигналы от реальных самолетов или имитировали присутствие их в огромном количестве. Операторы РЛС были совершенно сбиты с толку бесчисленными белыми вспышками на экранах РЛС и не имели возможности определить количество и местонахождение приближающихся самолетов противника.
Англичане додумались до этого средства противодействия годом ранее, вскоре после их рейда на Гавр, в результате которого были захвачены некоторые компоненты РЛС «Wuerzburg». Однако какое-то время англичане колебались применять пассивные помехи, так как боялись что они попадут в руки противника и могут быть использованы против них же. Наконец, сам Уинстон Черчилль отдал приказ об использовании пассивных помех в запланированном на июль 1943 г. налете на Гамбург. Приказ Королевским ВВС был отдан условной фразой: «Open window (открыть окно)», после чего полоски фольги стали называться Window. Американцы стали называть их «chaff». В отечественной терминологии полоски фольги получили название дипольных отражателей или противорадиолокационных отражателей (ПРЛО).
Разрушения и человеческие жертвы, вызванные воздушным налетом британцев на Гамбург, были огромны. Всего за два с половиной часа на порт и центр города было сброшено 2 300 тонн бомб. Из 791 бомбардировщика, участвовавшего в налете, только 12 не смогли вернуться; этот показатель потерь составил менее трети среднего количества терявшихся в самых последних ночных налетах на Германию самолетов. Кроме того, хаос, возникший в немецкой системе ПВО, позволил британцам бомбить город с большей точностью, чем когда-либо прежде. Налет на Гамбург был, несомненно, наиболее успешным налетом, когда-либо совершенным бомбардировщиками Королевских ВВС, а его успех в значительной степени обеспечен применением простого, но эффективного средства — обычной фольги!
Прошло достаточно много времени пока немцы поняли, что странные предметы, падающие как дождь с неба, представляют собой простейшее средство введения в заблуждение их РЛС и системы наведения. По крайней мере, сотни полосок было достаточно для того, чтобы создать на экране РЛС ответный сигнал, эквивалентный ответному сигналу самолета; случайно, но большинство немецких РЛС, работающих на частотах между 550 и 570 МГц, были наиболее уязвимы к помехам и, поэтому для создания им помех требовалось минимальное количество полосок фольги. Во время налета на Гамбург с каждого из самолетов, выделенных для этой роли, было сброшено по две тонны пассивных помех!
Через две ночи на Гамбург был совершен повторный налет, а затем последовали налеты и на другие большие немецкие города, и во всех этих налетах использовалось новое средство электронного противодействия. За первые шесть налетов было совершено 4000 самолето-вылетов и потеряно всего 124 бомбардировщика (3% от общего количества), что было намного ниже потерь, понесенных в предыдущих налетах. Через несколько месяцев генерал Вольфганг Мартини, начальник связи Люфтваффе, признал, что тактический успех противника был абсолютным. Однако, вскоре после того как прошел первоначальный шок, немцы решили сами производить эти бесценные полоски фольги и через шесть недель после налета на Гамбург использовали их с чрезвычайно хорошими результатами при налете на британскую авиабазу.
Первая отечественная РЛС с когерентно-импульсной обработкой.
Использование пассивных помех англичанами не осталось без внимания в СССР. В частности, во вновь организованном в соответствии с «Постановлением о радиолокации» в 1943 г. ЦНИИ-108 (сегодня ГОСЦНИРТИ) были развернуты работы по созданию пассивных помех [2]. Наиболее известной в этой области стала работа сотрудника ЦНИИ-108 М. А. Леонтовича “Теоретические основы метода создания дипольных помех”, которая относится к 1944 г. Позже это направление развивалось также и на основе использования ложных целей.
Командование Красной армии и военные инженеры Главного Артиллерийского Управления (ГАУ), которые занимались обеспечением Войск ПВО радиолокационными станциями, отчетливо представляли, какие неисчислимые беды и разрушения может нанести авиация противника, если РЛС будут выведены из строя и зенитные и авиационные средства окажутся «слепыми». Поэтому в конце 1943 г., для ускорения разработки средств защиты от пассивных помех, Советом по радиолокации при Государственном Комитете Обороны, созданным также по «Постановлению о радиолокации», был объявлен изобретательский конкурс. Его предполагаемые участники были созваны на совещание, где были сформулированы условия конкурса. Там же Ю. Б. Кобзарев сделал сообщение о возможных методах борьбы с пассивными помехами. В сообщении особое внимание уделялось когерентно-импульсной технике, основанной, в частности, на применении вспомогательного источника когерентных колебаний, фазируемого импульсами передатчика.
Можно считать, что идея Ю. Б. Кобзарева, высказанная на совещании, и положила начало новому направлению в радиолокационной технике — когерентному приему радиолокационных сигналов.
Свою идею Кобзарев взял за основу способа когерентно-импульсной работы РЛС, который в виде заявки на изобретение направил в Комитет по изобретениям. Авторское свидетельство № 5352с. было получено им в 1945 г. Приступить к практической реализации предложенного способа Кобзареву удалось только в 1949 г., когда в НИИ20 под его руководством, в рамках НИР «Стекло» [3], началась разработка когерентно-импульсной техники применительно к новым РЛС дальнего обнаружения в 10-сантиметровом диапазоне. Основные трудности работ НИИ-20 были связаны как с новым диапазоном волн, который еще только осваивался в амплитудном режиме при разработке послевоенных станций П-50 и П-20, так и с реализацией когерентно-импульсного режима в РЛС дальнего обнаружения, работающих с малой частотой повторения (порядка 300 Гц). Тем не менее, эти трудности были преодолены и, как писал в то время Ю. Б. Кобзарев: «В результате работ НИИ-20, занимающего в области когерентно-импульсной техники ведущее положение, все основные вопросы когерентно-импульсной техники к началу 50-х годов были разрешены». Далее Ю. Б. Кобзарев пишет: «Следует, конечно, не забывать, что когерентно-импульсная техника по сложности и тонкости применяемых в ней приемов радикально отличается от обычной импульсной техники, использовавшейся до настоящего времени в радиолокации. Внедрение когерентно-импульсной техники в радиолокационную практику будет поэтому сопряжено с преодолением значительных трудностей». Прежде всего нужно было решить следующие проблемы:
- создать 10-сантиметровый местный гетеродин с высокой стабильностью частоты;
- создать когерентный гетеродин на 30 МГц с высокой стабильностью частоты;
- разработать линии задержки на большое время, равное периоду повторения импульсов РЛС дальнего обнаружения;
- разработать систему запуска передатчика, обеспечивающего равенство периода повторения и времени задержки с высокой степенью точности;
- разработать мощный передатчик с высокой степенью постоянства времени начала генерации относительно момента запуска:
- разработать устройство компенсации влияния ветра;
- разработать систему автоподстройки частоты.
Что касается перечисленных задач, то для их решения или вовсе не было опыта, или имевшегося опыта было явно недостаточно. Однако эти проблемы были решены. Первой отечественной РЛС, в которую была встроена когерентная система обработки сигналов, стала П-20 («Перископ»). В НИР «Стекло» со всей очевидностью было доказано, что предложенный Ю. Б. Кобзаревым способ защиты РЛС от пассивных помех, основанный на фазировании когерентного гетеродина радиоимпульсом магнетрона (впоследствии названный псевдо-когерентным методом), может успешно применяться в РЛС дальнего обнаружения. Доказательством тому служит тот факт, что на протяжении последующих многих лет этот метод был внедрен во многих отечественных магнетронных РЛС: П-15, П-30, П-30М, П-35, П-35М, П-37, П-80, П-90 и др. Эти РЛС прожили эффективную и долгую жизнь. Они применялись в боевых действиях на Ближнем Востоке и во Вьетнаме и везде демонстрировали высокие тактико-технические характеристики.
Первые цифровые системы когерентной обработки сигналов.
По мере того как магнетроны в передатчиках РЛС заменялись мощными усилителями (на клистронах ЛБВ, амплитронах), что позволяло получить истинную когерентность излучаемых радиоимпульсов, а на смену ртутным линиям задержки и потенциалоскопам пришли кварцевые ультразвуковые линии задержки, работающие на промежуточной частоте, эффективность систем селекции движущихся целей (СДЦ) существенно повышалась. Однако линии задержки требовали термостатирования и всевозможных автоматических регулировок и поэтому проблема стабильной работы аналоговых когерентных систем оставалась главной. И хотя более совершенная элементная база с появлением транзисторов и первых интегральных микросхем серьезным образом повлияла на построение когерентных систем обработки радиолокационных сигналов, самым узким местом к концу 60-х гг. оставалось быстродействующее аналого-цифровое преобразование. Может быть поэтому первым отечественным цифровым устройством с когерентной обработкой радиосигналов была не система СДЦ, а когерентный многоканальный доплеровский накопитель на 32 импульса [4, 5].
Мне довелось участвовать в разработке этого устройства, когда я работал в Новосибирском Научно-исследовательском институте измерительных приборов (тогда п/я 39). Что же способствовало созданию цифрового когерентного накопителя, который был использован в РЛС 9С18 (главный конструктор А. П. Ветошко) для защиты от мощных шумовых заградительных помех? К концу 60-х гг. в нашей стране появились первые цифровые микросхемы сдвиговых регистров 186-й серии. Например, КР186ИР4 — это 64-разрядный квазистатический последовательный регистр сдвига. Именно на них и были реализованы цифровые линии задержки когерентного накопителя. Для стабилизации ложных тревог на входе накопителя было применено жесткое ограничение сигналов на промежуточной частоте с последующим выделением с помощью фазовых детекторов квадратурных составляющих, которые с помощью компараторов квантовали фазу на четыре уровня. С отводов регистров сдвига сигналы подавались на резистивную матрицу, формирующую весовые коэффициенты дискретного преобразования Фурье. Сигналы с 32 доплеровских каналов объединялись на выходе схемой максимального отбора и после сравнения с порогом подвергались дополнительно некогерентному накоплению. Испытания этого накопителя в 1974—1975 гг. показали хорошие результаты, и самое главное выявили преимущество цифровой обработки. Создать подобное устройство на аналоговых линиях задержки не представлялось возможным. Попытки применить жесткое ограничение на входе системы СДЦ, как в когерентном накопителе, для упрощения цифровой их реализации показали отрицательный результат. Настоящей сенсацией в то время я бы назвал статью в Westinghouse Electric Corporation, где было приведено описание практической реализации первой в мире цифровой системы СДЦ [6]. Как отмечали авторы этой статьи, аналого-цифровой преобразователь являлся наиболее сложным устройством в этой цифровой системе СДЦ. Это и понятно, 9-разрядный АЦП с частотой преобразования 10 МГц в конце 60-х гг. изготовить было непросто. В качестве цифровой памяти использовалась память на ферритовых кольцах. Но самое удивительное, что когерентная обработка была реализована для пятиимпульсной пачки с весовыми коэффициентами –0,875; –1; 3,750; –1; –0,875, оптимизирующими как вид скоростной характеристики, так и упрощающими их ввод благодаря возможности представления в виде –0,875 = –1 + 1/23 и 3,750 = 22–1/22
Рис. 1. Функциональная схема первой в мире цифровой системы СДЦ
Рис. 2. Первый в мире цифровой адаптивный компенсатор пассивных помех (РЛС СТ-68)
Для ускорения работ по созданию цифровой системы СДЦ в НИИИП мне было поручено подготовить техническое задание и взаимодействовать с Институтом электрометрии СОАН СССР, где по договору с НИИИП разрабатывался восьмиразрядный высокоскоростной АЦП с частотой дискретизации 3 МГц. Эти работы велись в лаборатории А. Н. Касперовича. Такой АЦП был создан, более того он был внедрен на Новосибирском заводе им. Коминтерна в РЛС 1С12 в рамках проводившейся в то время ее модернизации. К сожалению, в дальнейшем в РЛС 70-х гг. (5Н64, 9С15) НИИИП цифровую когерентную обработку в СДЦ не применял. Это было связано с тем, что система СДЦ, уже в то время адаптивная, на имеющейся элементной базе не могла быть реализована. Да и сжатие широкополосного ЛЧМ-сигнала тогда могли осуществить только в аналоговом согласованном фильтре на ПАВ с использованием дисперсионной линии задержки (на этой же линии задержки и формировался ЛЧМ-сигнал по схеме «ключ-замок»). Оригинальный алгоритм адаптивной системы СДЦ в отделе, которым руководил А. А. Мамаев, в упрощенном виде (с однократным вычитанием) был основан на авторском свидетельстве «Адаптивное устройство обработки импульсных сигналов» [7]. Лишь в начале 80-х гг. в состав опытного образца РЛС 64Н6 (главный конструктор Ю. А. Кузнецов, затем Г. Н. Голубев) была введена когерентная цифровая обработка сигналов. Несколько более преуспел в области цифровой когерентной обработки ВНИИРТ (г. Москва). Я имею в виду прежде всего мобильную трехкоординатную РЛС СТ-68, к разработке которой институт приступил в 1970 г. [8]. Это была первая РЛС по многим направлениям. Во-первых, она была многофункциональной, где кроме активных режимов работы был реализован режим пассивной пеленгации постановщиков активных помех. Многофункциональность проявлялась и в использовании дополнительного приемного канала с когерентной обработкой квазинепрерывного сигнала. Следующее достижение состояло в том, что впервые в этой РЛС была применена фазированная решетка на основе волноводно-щелевых линеек. Впервые в РЛС был использован автосъем радиолокационной информации с функциями автозахвата, автосопровождения и автоматической выдачи информации потребителям об обнаруживаемых целях. И, наконец, в‑третьих, в этой РЛС впервые была реализована цифровая когерентная адаптивная обработка сигналов, в частности, впервые в отечественной радиолокации был реализован цифровой адаптивный компенсатор пассивных помех [9,10].
Рис. 3. Стойка с унифицированными модулями цифровой когерентной обработки сигналов
В дальнейшем (1981—1985 гг.) в институте развертывается целая серия НИР («Перо», «Радуга», «Перспектива», «Ковер», «Планида» и др.), направленных на создание научно-технического задела для создания РЛС нового поколения. Облик РЛС нового поколения должен был отвечать многим требованиям, в частности, таким как твердотельное исполнение, цифровая обработка сигналов, адаптивность в сложной помеховой обстановке, унификация как межвидовая (РЛС для ПВО и УВД МГА), так и внутривидовая по применяемым в РЛС модулям и блокам.
Как пример такой унификации приведу перечень ячеек для реализации адаптивного цифрового когерентного обнаружителя движущихся целей, разработанных в рамках НИР «Перо», документация на которые была передана на предприятие п/я В-2588 (г. Муром): ячейки АЦП (9 разрядов 2,5 МГц), ячейки ОЗУ на микросхемах памяти с произвольной выборкой 134РУ6, ячейки сумматора и вычитателя, ячейки умножителя, ячейки функциональных преобразователей sin, cos, arctg, Но самое главное была передана конструкторская документация на стойку когерентного адаптивного обнаружителя движущихся целей, реализованного на этих унифицированных ячейках (см. рис.3).
В результате созданного научно-технического задела в институте были разработаны несколько твердотельных РЛС блочно-модульного построения. Это РЛС семейств «КАСТА» и «ГАММА» [8].
К концу 80-х гг. цифровая когерентная обработка сигналов стала применяться во многих НИИ и КБ при проектировании наземных РЛС кругового обзора, военно-морских РЛС, в станциях наведения ЗРК, бортовых радиолокационных комплексах самолетного и космического применения. Важно отметить, что появившиеся в то время первые сигнальные процессоры позволяли перейти от аппаратной реализации когерентной обработки к программируемой. В частности, мой первый опыт разработки программируемой когерентной обработки в РЛС для управления дорожным движением «ФОДОКОМ» относится к 1990 г. Когерентная обработка была реализована на советском сигнальном процессоре 1867ВМ1 (аналог TMS320C10), который в реальном масштабе времени осуществлял доплеровскую фильтрацию по алгоритму 256 точечного БПФ с весовой обработкой по Хэммингу для минимизации уровня боковых лепестков в частотной области. Эта программируемая доплеровская РЛС непрерывного излучения показала все преимущества концепции программируемых систем.
Позже, в 1993 г. все преимущества программируемых радиоэлектронных когерентных систем были реализованы при создании многопроцессорного программируемого комплекса «СИНТАЛФОН». Это было 32-канальное устройство с сигнальными процессорами 1867ВМ2 (аналог TMS320C25) в каждом приемном канале, конструктивно размещенное в КАМАКе (CAMAC — Сomputer Automated MeasurementAndControl). В IBMPCустанавливалась плата управления с сигнальным процессором, имеющим параллельно-последовательный интерфейс. Конфигурация такой программируемой среды задавалась загрузкой программного обеспечения через последовательный интерфейс. Аналоговые принимаемые сигналы оцифровывались 10-разрядными АЦП с частотой дискретизации 1,2 МГц, а последующая фильтрация, обнаружение когерентных сигналов производились в сигнальном процессоре. Результаты такой обработки в виде файла данных передавались по параллельному интерфейсу в плату управления IBM PC, используя логику прерываний. Экран IBM PC использовался для отображения всей полученной информации. Модульность конструкции, программируемая гибкость этого комплекса позволяли применять его для решения различных задач когерентной обработки.
Рис. 4. Модуль цифровой когерентной обработки сигналов на DSP
В то время как в России в 90-е годы практически была полностью разрушена электронная промышленность, на западе, а затем в Юго-Восточной Азии и Китае была создана мощная инфраструктура производств комплектующих для программируемой электроники. К началу XXI века были разработаны несколько поколений микропроцессоров, сигнальных процессоров и ПЛИС.
Появление в новом веке целых семейств высокопроизводительных сигнальных процессоров, созданных фирмами-лидерами в этой области — Texas Instrumentsи AnalogDevices, а также супер-ПЛИС из Xilinx и Altera, открыло новые горизонты в развитии программируемых систем цифровой обработки когерентных сигналов. В настоящее время практически все разрабатываемые во ВНИИРТе РЛС используют программируемую цифровую обработку когерентных сигналов [11,12]. В частности, в современной РЛС разработки ВНИИРТ «ПАНЦИРЬ-С1» используется высокопроизводительный программируемый модуль ЦОС на нескольких сигнальных процессорах фирмы Analog Devices (см. рис.4).
Заключение.
Сейчас Россия оказалась перед новым вызовом — технологическим, т. е. быть или не быть ей передовой независимой державой, или превратиться в колонию с последующим распадом. Как и 70 лет назад в военную пору, когда Сталин подписал историческое Постановление «О радиолокации», новой демократической России нужен технологический прорыв, обеспечивающий прежде всего переход от аппаратной цифровой когерентной обработки к программируемой цифровой обработке на отечественных ПЛИС и сигнальных процессорах. И хотя они уже появляются, требуется еще много усилий, особенно в условиях рынка и тем более в условиях присоединения России к ВТО, для их массового освоения и применения в задачах когерентной цифровой обработки сигналов в радиолокации, радиосвязи и других областях.
Литература
- История отечественной радиолокации. — М.: ИД «Столичная энциклопедия», 2011.
- Кобзарев Ю. Б. Создание отечественной радиолокации. М.: «Наука», 2007.
- Разработка методов уменьшения помех от местных предметов, метеофакторов и дипольных отражателей в станциях дальнего обнаружения. Научно-технический отчет по НИР «Стекло». НИИ-20, 1951.
- Теоретические основы радиолокации. Под ред. Ширмана Я. Д. М.: «Советское радио», 1970.
- Лихарев В. А. Цифровые методы и устройства в радиолокации. М.: «Советское радио», 1973.
- Linder R. A., Kutz G. H. Digital Moving Target Indicators. IEE Transaction on Aerospace and Electronic Systems. Vol. AES-3, № 6, 1967.
- Бартенев В. Г., Шлома А. М. Адаптивное устройство обработки сигналов. № 604414 с приоритетом от 6 июля 1976 г.
- ВНИИРТ. Страницы истории. М.: ИД «Оружие и технологии», 2006.
- Бакулев П. А ., Степин В. М. Методы и устройства селекции движущихся целей. М.: «Радио и связь», 1986.
- Кузьмин С. З. Основы проектирования систем обработки радиолокационной информации. М.: «Радио и связь», 1986.
- Bartenev V. Software Radar: New Reality. Radar 2006. CIE ‘06. International Conference. China, Shanghai 16—19 Oct. 2006, Print ISBN:0—7803—9582—4
- Корляков В. В., Бартенев В. Г., Битюков В. К., Григорьев Л. Н. Всероссийский НИИ радиотехники — 90 лет лидерства. Вестник Концерна ПВО «Алмаз-Антей» № 2, 2011.
Об авторе: профессор ОАО ВНИИРТ, д. т.н.;
syntaltechno@mail. ru
Статья опубликована в журнале «Электросвязь: история и современность» № 3 2014 г.
Помещена в музей с разрешения редакции
21 июня 2014
NWS JetStream — Как работает доплеровский радар?
Основы радаров заключаются в том, что луч энергии, называемый радиоволнами, излучается антенной. Когда они сталкиваются с объектами в атмосфере, энергия рассеивается во всех направлениях, а часть энергии отражается непосредственно обратно на радар.
Чем больше объект, тем большее количество энергии возвращается в радар. Это дает нам возможность «видеть» капли дождя в атмосфере. Кроме того, время, необходимое для передачи и возврата луча энергии в радар, также зависит от расстояния до этого объекта.
Доплеровский радар
По своей конструкции, доплеровские радиолокационные системы могут предоставлять информацию о перемещении и целей, а также об их местоположении. Когда WSR-88D передает импульсы радиоволн, система отслеживает фазу (форма, положение и форма) этих импульсов.
Путем измерения сдвига (или изменения) фазы между переданным импульсом и принятым эхом вычисляется движение цели непосредственно к радару или от него.Затем это обеспечивает скорость в направлении, в котором указывает радар, называемую радиальной скоростью. Положительный фазовый сдвиг означает движение к радару, а отрицательный сдвиг указывает на движение от радара.
Доплеровский радар посылает энергию в пулах и прослушивает любой возвращенный сигнал.Эффект фазового сдвига подобен «доплеровскому сдвигу», наблюдаемому со звуковыми волнами. При «доплеровском сдвиге» высота звука объекта, движущегося к вашему местоположению, на выше из-за сжатия (изменения фазы) звуковых волн.По мере того, как объект удаляется от вашего местоположения, звуковые волны растягиваются, что приводит к понижению частоты на .
Вы, наверное, слышали об этом эффекте от машины или поезда скорой помощи. Когда автомобиль или поезд проезжают мимо вас, звук сирены или свистка уменьшается по мере того, как объект проезжает мимо.
импульсов доплеровского радара имеют среднюю передаваемую мощность около 450 000 ватт. Для сравнения, обычная домашняя микроволновая печь вырабатывает около 1000 Вт энергии. Тем не менее, каждый импульс длится около нуля.00000157 секунд (1,57×10 -6 ) с периодом прослушивания 0,00099843 секунды (998,43×10 -6 ) между ними.
Следовательно, общее время, в течение которого радар фактически передает сигнал (если сложить длительность передачи всех импульсов, каждый час, ), радар передает чуть более 7 секунд каждый час. Остальные 59 минут и 53 секунды тратятся на прослушивание любых возвращенных сигналов.
Доплеровский радар NWS использует стратегии сканирования, при которых антенна автоматически поднимается на все более и более заданные углы, называемые срезами возвышения, по мере ее вращения.Эти срезы высот составляют диаграмму охвата объема (VCP).
Когда радар просматривает все срезы высот, сканирование объема завершается. В режиме осадков радар выполняет объемное сканирование каждые 4-6 минут в зависимости от того, какая схема объемного покрытия (VCP) работает, обеспечивая трехмерный обзор атмосферы вокруг радиолокационной станции.
Достигните максимума! Модели покрытия объема: включите!
Поднимите его на МАКСИМАЛЬНО! Поднимите меня!
Поднимите его на МАКСИМАЛЬНО! Получение второго мнения
Двойная поляризация
Дополнением к доплеровскому радару NWS была двойная поляризация радиолокационного импульса.Апгрейд «dual-pol» включал новое программное обеспечение и аппаратное обеспечение антенны радара, которое обеспечивает гораздо более информативное двухмерное изображение.
РадарDual-pol помогает прогнозистам NWS четко определять дождь, град, снег, линию дождя / снега и ледяную крупу, улучшая прогнозы для всех типов погоды.
Еще одним важным преимуществом является то, что двойная оптика более четко обнаруживает обломки торнадо (шар обломков), переносимые по воздуху, что позволяет прогнозистам подтверждать, что торнадо находится на земле и причиняет ущерб, чтобы они могли более уверенно предупреждать сообщества на своем пути.Это особенно полезно ночью, когда наземные наблюдатели не видят торнадо.
Эти два изображения показывают, как двойная поляризация помогает синоптику NWS обнаруживать торнадо, причиняющее ущерб. На левом изображении показано, как доплеровский радар может обнаруживать вращение. Красный цвет между двумя желтыми стрелками указывает на исходящий ветер, а зеленый цвет указывает на прибывающий ветер относительно местоположения радара.
До появления двойной поляризации это все, что мы знали о вращении у поверхности Земли.Если бы штормовые наблюдатели не наблюдали за штормом, мы не знали бы наверняка, что торнадо присутствует.
Правое изображение показывает, как информация о двойной поляризации помогает обнаруживать обломки, захваченные торнадо, поэтому мы можем быть уверены в торнадо, поскольку эти две области совпадают.
Быстрые факты
Все современные РЛС являются оцифрованными доплеровскими РЛС. Поэтому прежняя линия радиолокационного обзора (связанная с аналоговыми радиолокаторами) больше не применима.
Тем не менее, некоторые местные телеканалы продолжают вас дурачить, показывая в своих трансляциях широкий радар.
Подметающая рука — это «фейковые новости» (буквально). Само радиолокационное изображение может быть достоверным, но поворотный рычаг добавляется компьютерной программой после того, как изображение было создано в .
Даже если кажется, что изображение обновляется, когда линия проходит через какой-либо конкретный шторм, эта широкая линия создана компьютером, а не реальна.
Импульсный доплеровский радар — важные элементы и принцип работы
Импульсный радар излучает короткие и мощные импульсы и в период молчания принимает эхо-сигналы.В отличие от радара непрерывного действия, передатчик выключается до завершения измерения. Этот метод характеризуется импульсной модуляцией радара с очень короткими импульсами передачи (обычно длительность импульса передачи τ ≈ 0,1… 1 мкс). Между импульсами передачи есть очень большие паузы между импульсами Τ >> τ, которые называются временем приема (обычно Τ ≈ 1 мс). Расстояние до отражающих объектов определяется путем измерения во время работы (на фиксированном радаре) или путем сравнения характерных изменений доплеровского спектра со значениями для данных расстояний, хранящимися в базе данных (для радара на быстро движущейся платформе).Импульсные радары в основном предназначены для работы на больших расстояниях и передают относительно высокую импульсную мощность.
Важной отличительной чертой другого радиолокационного метода является необходимый временной контроль всех процессов внутри импульсного радиолокатора. Передний фронт переданного импульса является эталоном времени для измерения времени работы. Он заканчивается переходом нарастающего фронта эхо-сигнала в вершину импульса. Систематические задержки в обработке сигнала необходимо корректировать при расчете расстояния.Случайные отклонения влияют на точность импульсного радара.
- Передать сигнал
- Эхо-сигнал Проект
- , блок-схема
- Приложения
Передать сигнал
Форму передаваемого сигнала математически можно описать как:
| s (t) = A (t) · sin [2πf (t) · t + φ (t)] | (1) |
Функция A (t) представляет собой изменение амплитуды в функции времени t, то есть модуляцию амплитуды.В простейшем случае передатчик включается на короткое время (на время τ) и в остальное время остается в «выключенном положении». Тогда A (t) в случае передачи = 1, в противном случае = 0. Тогда функция времени определяется частотой повторения импульсов и скважностью. Поскольку возвратные сигналы радара подвержены различным потерям, фактическая амплитудная модуляция не имеет смысла, за исключением только этой функции переключения (включение / выключение). Огибающая частотного спектра последовательности прямоугольных импульсов представлена функцией (sin x) / x.Существенные части мощности передачи (обратите внимание на логарифмическую шкалу ординаты на рисунке 3) находятся в области B HF = 2 / τ вблизи частоты передачи f tx .
Частота повторения импульсов f PRF , длительность переданного импульса τ и время приема (Τ — τ) влияют на характеристики радара, например минимальный диапазон измерения (передающий импульс должен полностью выйти из антенны) и максимальный однозначный диапазон (эхо-сигнал должен быть получен за время до следующего передающего импульса).
Длительность передаваемого импульса τ существенно влияет на разрешающую способность по дальности ΔR импульсного радара. Разрешающая способность по дальности:
Чем короче импульс передачи, тем ближе можно расположить один за двумя другими отражателями, чтобы он, тем не менее, был обнаружен как два отражателя, а не как один большой объект. Полоса пропускания передатчика B HF импульсного радара увеличивается с уменьшением ширины импульса:
Укорочение импульсов ограничивает максимальный диапазон в случае простой импульсной модуляции.В этих условиях энергия импульса E p может быть увеличена только на мощность импульса P S при требуемом разрешении по дальности.
Для максимальной дальности действия импульсного радара решающее значение имеет энергия импульса, а не его мощность:
| E p = P s · τ = P av · Τ = | P ср. | где | E p = энергия импульса P S = мощность импульса передачи P ср = средняя мощность | (4) |
| ф PRF |
Существенных улучшений в этой ситуации можно достичь с помощью внутренней модуляции импульса передачи (внутриимпульсная модуляция).Взаимосвязь между длительностью передаваемого импульса и длительностью принятого импульса разрешается путем сжатия импульса в приемнике. Расположение различных отражателей и измерение их индивидуальной дальности также может быть выполнено в пределах длительности передаваемого импульса.
Функция φ (t) в уравнении (1) является выражением для сдвига фазы всего сигнала. Начальная фаза передаваемого сигнала может быть известна как , так и может быть предсказуемой (из-за генерации колебаний).В этом случае импульсный радар относится к полностью когерентным радарам. Фактический фазовый угол также может быть известен, но начальное состояние может быть непредсказуемым. Тогда радар — это один из псевдокогерентных радаров. Если эта начальная фаза полностью неопределенная (хаотическая), то радар является одним из некогерентных радаров. Только при возможной фазовой внутриимпульсной модуляции эта функция приобретает большее значение.
Эхо-сигнал
Обычно предполагается, что длительность переданного импульса равна длительности отраженного эхо-импульса.Таким образом, в соотношении передаваемой мощности и принимаемой мощности (которое используется в основном уравнении дальности действия радара) можно обойтись без указания времени.
- При отражении передаваемого сигнала спектр может быть изменен:
- Могут возникать дополнительные гармоники несущей частоты.
- Несущая частота может быть наложена на одну или несколько доплеровских частот.
- Направление поляризации можно изменить.
- Длительность импульса эхо-сигнала непостоянна. Длительность отраженного импульса может быть значительно увеличена из-за помех от отражений в областях с немного разными расстояниями (и с разным временем прохождения).
Все вместе: эхо-сигнал подвержен столь многим влияниям, что форма волны и форма эхо-сигнала в результате должны рассматриваться как неизвестные. Тем не менее, для создания оптимального согласованного приемника или оптимального согласованного фильтра необходимо настроить несколько каналов приема параллельно с учетом всех возможных деформаций сигнала.В схеме выбора эхо-сигнал с наилучшим (наибольшим из) отношением сигнал / шум плюс помехи (SNIR) затем обрабатывается. «Положение» наибольшего переключателя также сохраняется как важная информация для идентификации этого эхо-сигнала.
Как правило, ширина полосы приема сохраняется как можно меньше, поэтому не возникает большого количества ненужных шумов. Следовательно, для выбора полосы пропускания только с B HF = 1 / τ для простого импульсного радара. Влияние шума можно подавить в приемнике с помощью интегрирования импульсов.Здесь формируется сумма периодов импульсов. Предполагается, что отражающий объект неподвижен во время этих периодов импульсов. Поскольку шум распределен случайным образом, сумма шума не может достигать суммы эхо-сигналов. Благодаря этой мере улучшается отношение сигнал / шум.
Критические компоненты
- Синхронизатор
- Модулятор
- Преобразователь
- Дуплексер
- Антенна
- Приемник
- Дисплей
Конструкция импульсного радара зависит от того, находятся ли передатчик и приемник в одном месте (моностатический радар) или оба компонента развернуты в совершенно разных местах (бистатический радар).
Моностатический импульсный радар, помимо компактной конструкции, имеет то преимущество, что важные для импульсных радаров устройства синхронизации могут быть сосредоточены в центральном блоке синхронизации. Таким образом, внутреннее время работы триггеров радара может быть низким. Сложная радиолокационная антенна может использоваться посредством мультиплексора как для передачи, так и для приема.
Недостатком является то, что часто высокочувствительный радиолокационный приемник должен отключаться дуплексером для собственной защиты от высокой мощности передачи.За это время он ничего не может получить.
В бистатическом импульсном радаре приемник оборудован собственной антенной, расположенной в другом месте, чем передатчик. Это имеет то преимущество, что приемник может работать без значительных защитных мер против высокой мощности передачи. В простейшем случае сеть состоит из дополнительных приемников существующего моностатического импульсного радара. Приведен пример: метеорологический радар Poldirad в Оберпфаффенхофене, Германия (недалеко от Мюнхена).Приемные антенны не очень направленные: они должны иметь возможность принимать одновременно с нескольких направлений. Недостатком здесь является очень сложная синхронизация. Одновременно с эхо-сигналами приемник должен также принимать сигнал прямой передачи. Из этого сигнала и известного расстояния до передатчика должен генерироваться сигнал синхронизации. Основное военное применение бистатических конфигураций — радары, работающие над горизонтом (OTH).
Пассивные радары представляют собой вариант бистатических радаров.Они паразитически используют различные РЧ-излучения (радио- или телевизионные станции, или внешние импульсные радары). Пассивный радар вычисляет положение целей по разнице между временем прямого пути сигнала и дополнительным временем прохождения отраженного эха. сигналы. Неопределенности в измерениях можно исключить, с одной стороны, прямым пеленгованием с использованием паразитных излучений цели или синхронизацией двух пассивных радаров, работающих в разных местах.
Ожидается, что мировой рынок доплеровских радаров вырастет с оценки в 7 800 млн долларов США в 2017 году до 9 984 млн долларов США к 2023 году при среднегодовом темпе роста 4,20% с 2018 по 2023 год (прогнозируемый период).Тенденции и проблемы будущих исследований
Прогресс и развитие радиолокационных технологий нельзя отделить от продвижения междисциплинарных фундаментальных исследований, таких как оптика, средства измерения, визуализация, экспериментальное наблюдение, улучшение алгоритмов и оптимизация моделей.
Междисциплинарный дизайн и оптимизация радара не только учитывают дизайн связи между дисциплинами, но и более соответствуют сути проблемы, так что радиолокационный сигнал может быть высокого качества и точности.
Большинство мультидисциплинарных оптимизаций рассматривают многокритериальный механизм для уравновешивания междисциплинарного влияния и исследования общего оптимального решения, которое может эффективно избежать потерь рабочей силы, физических, финансовых ресурсов и времени, вызванных повторным проектированием.Некоторая мультидисциплинарная оптимизация радара может принимать совместное проектирование и параллельное проектирование, что может максимально сократить цикл.
Прогресс и развитие радиолокационных технологий нельзя отделить от продвижения междисциплинарных фундаментальных исследований, таких как оптика, средства измерения, визуализация, экспериментальное наблюдение, улучшение алгоритмов и оптимизация моделей. Междисциплинарный дизайн и оптимизация радара не только учитывают дизайн связи между дисциплинами, но также более соответствуют сути проблемы, так что радиолокационный сигнал может быть высокого качества и точности.Большинство мультидисциплинарных оптимизаций рассматривают многоцелевой механизм для уравновешивания междисциплинарного влияния и исследования общего оптимального решения, которое может эффективно избежать потерь рабочей силы, физических, финансовых ресурсов и времени, вызванных повторным проектированием. Некоторая мультидисциплинарная оптимизация радара может принимать совместное проектирование и параллельное проектирование, что может максимально сократить цикл.
Глубоко расширить базовое содержимое
С научным прогрессом в области микроволнового излучения, компьютеров, полупроводников, крупномасштабных интегральных схем и других областях, радарная технология постоянно развивается, и ее значение и содержание исследований постоянно расширяются.Функция радара постепенно превратилась из единственной функции в многозадачную и многофункциональную радиолокационную систему. Теория радиолокационной инженерии не ограничивается теоремой Шеннона, рабочая частота, полоса пропускания и разрешение которой улучшаются благодаря многофункциональной архитектуре. Также применяется реализация и анализ планирования пути и длины волны.
Диверсификация технологий обработки сигналов
В дополнение к традиционным методам обработки, таким как коррелированная / некоррелированная обработка, технология обработки сигналов включает пространственно-временную адаптацию (STAP), множественный вход и множественный выход (MIMO), синтетическую апертуру (SAR / ISAR / CSAR), синтетический импульс и апертуру. (SIAR), а также адаптивная / когнитивная технология обработки радиолокационных сигналов на основе искусственного интеллекта.
Классификация методов обнаружения
Соответствующие средства обнаружения также различаются для дифференцированных форм радиолокационных сигналов. Для обнаружения радиолокационного сигнала применяются различные технологические методы преобразования на основе вейвлетов, обнаружения помех, улучшения алгоритмов, частотно-временного кодирования и фазового кодирования, что может значительно уменьшить расхождение и затухание сигнала. Проделанная работа может эффективно способствовать повышению стабильности радиолокационного сигнала, что имеет важное значение для разрешения изображения при когерентной визуализации, передаче данных и приеме радара.
Вызовы
Существенные изменения произошли в целях, наблюдаемых радаром, серьезно ухудшилась электромагнитная среда работы радара, что оказывает огромное влияние на развитие радара.
Новые вызовы в используемой среде
Наземные радары трудно обнаружить и своевременно предупредить с большого расстояния из-за мертвого угла наблюдения, сильных помех от земли и гораздо более высокой скорости полета, чем у наземных транспортных средств.Жесткая электромагнитная среда с сильными электронными помехами в будущем, а также обнаружение, распознавание и подтверждение высокоскоростных невидимых целей (крылатые ракеты) и маскировка, маскировка и обман целей ПЗС на фоне сильных помех от земли и моря , затрудняет соответствие оригинальной РЛС с централизованным запуском и механическим сканированием этим новым требованиям.
Технические требования к радарам с активной фазированной решеткой
РЛС с активной фазированной антенной решеткой требует большого количества компонентов T / R, характеристики, вес, размер и стоимость которых являются важными факторами для всей системы AESA.Фазовращатель, аттенюатор, усилитель, каскад драйвера предусилителя, переключатель и схема управления — все они объединены в единую схему, имеющую всего около 4 ~ 5 мм 2 микросхемы многофункционального ядра, что ограничено технологией разработки микросхем.
Рассеивание тепла радиолокационной системой
Радиолокационная система — сложная и многофункциональная интегрированная система. Обработка данных осуществляется постоянно. При таком способе работы будет выделяться много тепла.Срочно необходимо решить проблему тепловыделения многофункциональной радиолокационной системы. Можно попробовать и применить некоторые методы отвода тепла, например отвод тепла с помощью тепловых трубок. и создание и развитие системы управления теплом.
Комментарии ()
Бортовой импульсный доплеровский радар, второе издание
Увеличение скорости радарных платформ и целей продолжает стимулировать развитие современных радаров с новыми формами волн и методами обработки сигналов.Это второе издание бортового импульсного доплеровского радара знакомит вас с новейшими радиолокационными технологиями с 1987 года, а также с теми, которые могут появиться в ближайшие пять лет. Книга дает ценную информацию о конкретных проблемах, уникальных для бортовых систем, и содержит наиболее подробное описание формы волны средней частоты повторения импульсов для более точного анализа характеристик. Обновления новых технологий в радарах с фазированной антенной решеткой, синтезированной апертуре, сжатии импульсов с высоким разрешением и доплеровской обработке расширяют ваше понимание новых возможностей радара.Книга содержит около 250 иллюстраций и 290 уравнений, а также предоставляет необходимую информацию для: планирования и прогнозирования результатов программ тестирования; Оценить предложения по новым радиолокационным системам или модернизации; Анализировать характеристики бортовых радаров в различных сценариях; Понимать возможности и ограничения бортовых систем; Книга включает в себя новый, расширенный охват важных тем, в том числе: электронные контрмеры, фазированные антенные решетки, формы сигналов высокого разрешения с растянутыми и ступенчатыми частотами, а также общие интегрированные процессорные технологии для доплеровской обработки.Приложение содержит новый программный код для демонстрации расчета слепых зон со средней частотой повторения импульсов и карты препятствий. Это последнее издание является ценным справочником для инженеров-радаров, инженеров систем ГСН и пользователей военных бортовых радаров. Он держит вас в курсе основных принципов и обоснования конструкции системы для определения характеристик радара, обработки сигналов для обнаружения целей и обработки сигналов для отслеживания и тестирования системы.
Принципы импульсного доплеровского радара.Влияние движения платформы на беспорядок. Спектральные характеристики импульсного сигнала. Режимы низкого, высокого и среднего PRF. Фазированная антенная решетка. Обработка доплеровского сигнала. Импульсное сжатие. Обработка синтетической апертуры. Обнаруживаемость и разрешение диапазона при средней ЧСИ. Выбор средних PRF. Методы отслеживания. Обнаружение цели. Влияние беспорядка на эффективность обнаружения. Целевые эффекты флуктуации. Автоматическое обнаружение цели. Электронные контрмеры.
- Линда Л.Харкнесс
- Гай В. Моррис
Доплеровский метеорологический радар и авиационный импульсный доплеровский радар
Когда сильный шторм движется по ландшафту Среднего Запада, группа метеорологов изучает поведение погоды и делает быстрые прогнозы. Информация, которую они собирают о приближающейся грозе, подготавливает сообщество к дождю, а также предупреждает их о любом потенциальном ущербе, который может быть нанесен сильным ветром.Ученые получают эти данные с близлежащей доплеровской радиолокационной вышки, одной из 159 радиолокационных вышек Национальной метеорологической службы NOAA в Соединенных Штатах.Доплеровский радар, который используют метеорологи, представляет собой специализированную радиолокационную систему, отражающую микроволновые сигналы от цели, такие как облака или дождь. Эти радиосигналы отправляются по круговой диаграмме с башни доплеровского радара. При контакте с осадками сигналы рассеиваются, но некоторые из сигналов возвращаются. Количество возвращающихся сигналов зависит от интенсивности осадков.Измерение времени, которое требуется радиолучу, чтобы вернуться к вышке с помощью эффекта Доплера, помогает определить расстояние и скорость шторма.
ТАКЖЕ СМОТРИТЕ: Редкий взгляд на доплеровский радар Национальной метеорологической службы
Эффект Доппера — это изменение частоты или длины волны (или других периодических событий) для наблюдателя, движущегося относительно ее источника. В 1842 г. австрийский математик и физик Дж. Кристиан Доплер открыл принцип, названный в его честь, когда наблюдал мерцание света от небесных звезд.Поскольку звук изменяется в зависимости от расстояния и направления от наблюдателя, он предположил, что свет, излучаемый звездой, изменяется в зависимости от ее скорости относительно Земли.
Эффект Доплера
Как отмечает ThePhysicsClassroom.com, «эффект Доплера наблюдается всякий раз, когда источник волн движется относительно наблюдателя». Шелдон Купер из Теории большого взрыва дает нам более техническое описание: «Эффект Доплера (или Доплеровский сдвиг) — это изменение частоты или длины волны волны (или других периодических событий) для наблюдателя, движущегося относительно ее источника.”
Полицейская сирена
Чтобы продолжить простые объяснения, мы используем пример полицейской машины. Допустим, вы стоите на углу и слышите сирену полицейской машины, движущейся в вашем направлении. Когда сирена приближается к вам, ее тон будет выше, чем если бы машина стояла неподвижно. По мере того, как полицейская машина приближается, проезжает и удаляется от вашего местоположения, высота поля будет повышаться.Есть четыре способа создания эффекта Доплера.Доплеровские радары могут быть:
- Когерентный импульсный (CP) — Когерентный означает, что вы ищете что-то, что отклоняется от частоты, которую вы отправили.
- Импульсный доплеровский радар — Доплеровский сдвиг — это частотный сдвиг когерентного импульса.
- Непрерывный сигнал (CW) — Непрерывный означает, что он не является пульсирующим, и вы ищете непрерывное обратное отклонение по частоте (может изменяться во времени) для проведения измерения.
- Частотная модуляция (FM) — Частотная модуляция означает, что частота изменяется как функция времени (например,грамм. Гц / с).
Подобно радиолокационной системе метеоролога, существуют другие радиолокационные системы, которые полагаются на эффект Доплера. Все они используют один и тот же принцип Доплера для определения скорости, направления и других факторов объекта. Хотя некоторые могут специализироваться на обнаружении небольших, быстро движущихся объектов, таких как самолет или транспортное средство.
Полицейский радар
Используя эффект Доплера, радар передает луч электромагнитного излучения с заданной частотой.Когда радар направлен на движущийся объект, такой как автомобиль или грузовик, радиоволна попадает в него и отскакивает обратно, возвращаясь к радару, но с другой частотой, зависящей от скорости объекта. Это дает им точное определение скорости объекта.
Терминальный доплеровский метеорологический радар (TDWR)
Терминальный доплеровский метеорологический радар (TDWR) — это тип доплеровской радиолокационной системы, эксплуатируемой Федеральным управлением гражданской авиации (FAA) вблизи аэропортов. Эти специально разработанные системы важны для обнаружения предательских микровзрывов.Микропорывы очень опасны, особенно для прибывающих или вылетающих самолетов, которые врезаются в землю. TDWR — это системы ближнего действия вблизи аэропорта или в аэропорту для определения опасных погодных явлений только в непосредственной близости от аэропорта.
Управление воздушным движением
Импульсный доплер также является основой радиолокатора с синтезированной апертурой (SAR), который используется для картирования наземных объектов и местности. Управление воздушным движением использует радар с синтезированной апертурой, чтобы идентифицировать и отслеживать самолет в воздухе, отделяя каждый из самолетов от всего беспорядка вокруг них.
Импульсный доплеровский радар в самолете
Импульсный доплеровский радар в самолете еще сложнее. Радиолуч, генерируемый в одном самолете, должен будет учитывать не только движущуюся цель, но и саму себя, которая движется. Для более четкой картины того, что делает цель, радар самолета определяет и отслеживает движущийся объект, одновременно отфильтровывая помехи, создаваемые статическими наземными объектами и погодой.
Отслеживание транспортного средства, движущегося по земле, с самолета — невероятное достижение еще и потому, что оно находится так близко к фоновым объектам, как земля и дорога.Доплеровская обработка с помощью цифрового компьютера радара позволяет измерять относительную скорость всех объектов, возвращающих сигнал.
Импульсный доплеровский радар APG-68
Импульсно-доплеровские радиолокационные системы используются в военных самолетах по всему миру. Радиолокатор управления огнем APG-68 — это импульсный доплеровский радиолокатор средней дальности в одном из самых популярных истребителей F-16 Fighting Falcon. Даже после более чем сорока лет службы F-16 четвертого поколения по-прежнему остается очень грозным истребителем для завоевания превосходства в воздухе благодаря возможностям, которые APG-68 предоставляет своему пилоту.APG-68 управляет лучом с помощью механического подвеса и имеет способность идентифицировать цели через сильные помехи с возможностью обзора вниз на расстояние примерно 30 миль. Способность смотреть вниз и сбивать означает, что истребитель имеет возможность обнаруживать, отслеживать и наводить оружие на цель ниже горизонта, отфильтровывая тяжелые наземные помехи, которые его окружают.
Доплеровский метеорологический радар
Наслаждайтесь коротким 2-минутным видео Кеном Уэзерсом, в котором он описывает, что и как работает доплеровский метеорологический радар.Если вам понравилась эта статья, поделитесь ею со своим сообществом и посетите наш раздел Блог / СМИ, чтобы прочитать больше статей о Radar.
Радиолокационная система
Без работающих радиолокационных систем пилот практически не видит в небе, особенно в условиях плохой видимости и высоких потолков. Уберите радар управления огнем, и пилоты не смогут обнаруживать или поражать воздушные и наземные цели. Очень важно, чтобы радар управления огнем был надежным и эффективным в боевой обстановке и в менее чем идеальных погодных условиях.
Опираясь на 39-летний опыт работы в отрасли и сертификаты AS9100D и ISO 9100, Duotech является ведущим поставщиком услуг по быстрому ремонту и поддержке вашего радара управления огнем APG-68.
Ken Weathers — Пояснение к доплеровскому радару
Специализированный радар
Duotech предоставляет недорогой, но высокопроизводительный радар, который представляет текущие возможности для угроз. Самолеты, оснащенные Nemesis RADAR, являются лучшим решением AdAir на рынке сегодня, с непревзойденным сочетанием производительности и потенциала роста.Компания Duotech Services разработала специальный RADAR для поддержки рынка AdAir, представив решение, которое:
- Высокая способность к использованию современных методов RADAR
- Возможность быстрого добавления дополнительных возможностей RADAR для удовлетворения требований обучения AdAir
- Создание репликации угроз через несекретные и классифицированные средства
- Предоставление наиболее устойчивой и удобной в обслуживании системы RADAR для приложения
Узнайте больше о Duotech Nemesis Radar
Нажмите, чтобы узнать больше о нашем обновлении радара F-5 Tiger II
Параллельно в реальном времени реализация цепочки обработки импульсно-доплеровского радиолокационного сигнала на массивно-параллельной машине на основе многоядерного DSP и последовательного соединения RapidIO | Журнал EURASIP о достижениях в обработке сигналов
В этом разделе мы представляем наши эксперименты и результаты исследований, которые мы выполнили для отображения цепочки обработки импульсно-доплеровского радиолокационного сигнала на предлагаемой параллельной машине.Мы представляем результаты сопоставления на одном ядре DSP, чтобы доказать необходимость параллельной обработки. Затем мы представляем простую модель, используемую для распределения цепочки обработки импульсно-доплеровского радиолокационного сигнала на параллельном компьютере, и представляем все оптимизации, которые мы предложили для сокращения времени связи с помощью SRIO. Наконец, мы приводим результаты внедрения.
5.1 Отображение результатов варианта использования на одном ядре DSP
Мы начинаем наше исследование сопоставления с реализации обработки варианта использования на одном ядре DSP C6678.Разработка кода выполнялась с использованием интегрированной среды разработки (IDE) Code Composer Studio (CCS), предоставленной TI. Все уровни оптимизации были активны для компилятора TI (версия 7.3.2). Из-за размера входного пакета все входные и выходные пакеты были помещены в память MSM, а коэффициенты — в память L2. L1 был полностью активирован как кеш.
Формирование луча и доплеровская фильтрация, основанные на матричном произведении, были реализованы и оптимизированы с использованием встроенных в C инструкций SIMD.TI C-intrinsic обеспечивает доступ к низкоуровневой сборке и ограничивает компилятор выбирать определенные аппаратные функции. Сжатие импульсов основано на алгоритмах БПФ и ОБПФ.
До оптимизации все этапы поворота на повороте были реализованы с использованием механизма EDMA. В столбце 2 таблицы 1 показаны полученные результаты. Контроллер EDMA не достиг высокой производительности при выполнении этапов поворота на повороте, поскольку он должен перемещать большое количество небольших блоков данных. Каждый малый блок данных состоит из 8 байтов: 4 байта для действительной части и 4 байта для мнимой части.Мы измерили производительность EDMA при перемещении данных разных размеров между двумя ячейками памяти (рис. 13), и действительно, при небольшом размере данных наблюдается снижение производительности.
Таблица 1 Время выполнения на одном ядре DSP Рис. 13Мы оптимизировали реализацию сценария использования, интегрировав угловой поворот 1 с формированием луча и угловой поворот 3 с доплеровской фильтрацией (рис. 14). В каждой итерации цикла обработки как формирования диаграммы направленности, так и доплеровской фильтрации, вместо последовательного сохранения вычисленных элементов пакета в выходном буфере в качестве изображения входного буфера, мы добавили инструкции, которые вычисляют и сохраняют предполагаемое конечное положение каждого элемента пакета на выходе. буфер.Хотя эти добавленные инструкции вызывают накладные расходы во время обработки, они все же намного меньше, чем выполнение переупорядочения данных с помощью EDMA. Угловой поворот 2 не может быть оптимизирован или интегрирован в сжатие импульсов, поскольку последнее основано на процедурах БПФ и ОБПФ, которые вычисляют на каждой итерации блок данных из Nr элементов пакета.
Рисунок 14Оптимизация реализации варианта использования на одном ядре DSP. Оптимизация реализации сценария использования на одном ядре DSP путем интеграции этапов поворота 1 и 3 в обработку.
Время выполнения, измеренное после оптимизации всей цепочки обработки сигналов, равно 13,9 мс (столбец 3 таблицы 1). Это значение намного превышает установленное ограничение реального времени для варианта использования в 1,64 мс. Следовательно, одного ядра DSP C6678 DSP недостаточно для реализации обработки вариантов использования в режиме реального времени.
5.2 Описание и оптимизация модели прямого картирования
Чтобы распределить алгоритм цепочки обработки импульсно-доплеровского радиолокационного сигнала на предлагаемой параллельной машине, мы использовали простую модель (рис. 15) [3, 21–25].В этой модели входящие данные равномерно распределяются по каждому из ядер DSP, и каждое ядро DSP выполняет все этапы цепочки обработки импульсно-доплеровского радара. Простой метод разделения обеспечивает низкую задержку. Параллельная машина должна обработать весь куб входных данных перед получением следующего куба.
Рисунок 15Поток данных в простой модели.
Алгоритм цепочки обработки импульсно-доплеровского радара состоит из функций без межпроцессорной связи на каждом этапе.Межпроцессорное взаимодействие происходит на этапах поворота. Поскольку алгоритм импульсного доплеровского радара включает три этапа поворота на повороте, простая модель отображения будет содержать три этапа межпроцессорной связи. На каждом этапе каждое ядро DSP должно обмениваться данными со всеми другими ядрами DSP, что подразумевает полную связь между ядрами DSP. Это ограничивает параллельную эффективность системы [3]. Мы предложили несколько оптимизаций для оптимизации межпроцессорной связи с помощью SRIO и повышения параллельной эффективности системы.
5.2.1 Оптимизация связи между формированием диаграммы направленности и сжатием импульсов в простой модели
Память параллельной машины, которая состоит из памяти всех обрабатывающих элементов, имеет одномерное измерение. Входные данные представляют собой трехмерный куб: Nc указывает количество датчиков антенны радара, Nr для оси диапазонов и Np указывает количество импульсов, отправленных каждым антенным датчиком. Чтобы отобразить куб входных данных в памяти параллельной машины, входные данные должны быть выровнены по одному измерению.Итак, существует шесть возможных организаций входных данных в зависимости от того, какие входные данные измерения будут выровнены. Например, организация входных данных 1 — это когда входные данные выровнены по измерению Nc как уровень 1, измерение Np на уровне 2 и измерение Nr на уровне 3. Организация входных данных 2 такая же, как организация входных данных 1: входные данные выровнены вдоль измерения Nc как уровень 1, но измерение Nr находится на уровне 2, а измерение Np — на уровне 3 (рисунок 16).
Рисунок 16Шесть возможных организаций входных данных.
Для эффективного выполнения первого этапа формирования луча в цепочке обработки сигналов импульсного доплеровского радара куб входных данных должен быть выровнен по измерению Nc, чтобы увеличить локальность доступа к памяти и избежать скачков при считывании данных из объем памяти. Действительно, запись или чтение данных с переходами из памяти DDR значительно снижает пропускную способность памяти DDR. Организации данных 3, 4, 5 и 6 исключены.
При выборе организации данных 1 куба данных в качестве входных данных для формирования диаграммы направленности, поток данных между формированием диаграммы направленности и сжатием импульсов представлен на рисунке 17.
Рисунок 17Поток данных между формированием диаграммы направленности и сжатием импульсов в простой модели перед оптимизацией.
Разделение формирования луча выполняется по размеру диапазона. Каждое ядро DSP будет обрабатывать Nr / 16 диапазонов. Время связи SRIO, рассчитанное между формированием диаграммы направленности и сжатием импульса, составляет около 9,18 мс (таблица 2).
Таблица 2 Время связи между формированием луча и сжатием импульса до оптимизацииПосле выбора организации данных 2 куба входных данных поток данных между формированием диаграммы направленности и сжатием импульсов станет таким, как показано на рисунке 18.В этом случае разделение формирования луча выполняется по размеру импульса. Каждое ядро DSP обработает один импульс. После формирования луча ядрам DSP не нужно будет связываться друг с другом. Им просто нужно переставить данные локально перед началом сжатия импульса. Было предложено и сопоставлено три метода для выполнения такой перегруппировки данных. Первый метод состоит в том, чтобы интегрировать перегруппировку данных в конце формирования луча, второй метод — выполнить эту перегруппировку данных с помощью EDMA, а третий — добиться этого с помощью центрального процессора.Из сравнительного исследования, представленного в таблице 3, наиболее эффективным способом выполнения этой перегруппировки данных является их интеграция в конце формирования диаграммы направленности.
Рисунок 18Поток данных между формированием диаграммы направленности и сжатием импульсов в простой модели после оптимизации.
Таблица 3 Сравнение методов преобразования данныхВ заключение, использование организации данных 2 на входе формирования диаграммы направленности устраняет связь посредством SRIO между формированием диаграммы направленности и сжатием импульсов (рисунок 19).
Рисунок 19Простая модель после оптимизации связи между формированием диаграммы направленности и сжатием импульсов.
5.2.2 Оптимизация связи между сжатием импульсов и доплеровской фильтрацией в простой модели
После выбора организации данных куба входных данных, который оптимизирует связь между формированием диаграммы направленности и сжатием импульсов в простой модели, поток данных между Сжатие импульсов и доплеровская фильтрация представлены на рисунке 20.
Рисунок 20Поток данных между сжатием импульса и доплеровской фильтрацией в простой модели перед оптимизацией.
Распределение компрессии импульса производится по длине импульса. Каждое ядро DSP обработает один импульс. Время связи SRIO, рассчитанное между сжатием импульса и доплеровской фильтрацией, составляет около 9,18 мс (таблица 4). Размер данных, отправляемых каждым пакетом SRIO, меньше 256 байт; SRIO используется неэффективно.Чтобы преодолеть это ограничение и сократить время связи с помощью SRIO, мы предложили добавить промежуточный этап между сжатием импульсов и доплеровской фильтрацией (рисунок 21). Предлагаемый метод разделяет связь по SRIO между сжатием импульсов и доплеровской фильтрацией на два этапа. Первый этап соответствует связям SRIO, а второй соответствует перестановке локальных данных.
Таблица 4 Время связи между сжатием импульса и доплеровской фильтрацией до оптимизации Рисунок 21Поток данных между сжатием импульса и доплеровской фильтрацией в простой модели после оптимизации.
Связь с помощью SRIO
В этом случае время связи SRIO, вычисленное между сжатием импульсов и доплеровской фильтрацией, равно 288 мкс (таблица 5). SRIO в предлагаемом способе используется эффективно. Размер данных, отправляемых каждым пакетом, превышает 256 байт.
Таблица 5 Время связи между сжатием импульса и доплеровской фильтрацией после оптимизацииСвязь SRIO между сжатием импульсов и доплеровской фильтрацией может перекрываться с вычислением.Его можно запустить параллельно со сжатием импульса (рисунок 22). Каждое ядро DSP в простой модели выполняет сжатие одного импульса и пучков Nb. Результат сжатия импульса каждого луча может быть отправлен SRIO на другое ядро DSP, не дожидаясь окончания сжатия импульса. Используя этот подход, параллельная машина будет выполнять 94% обмена данными через SRIO параллельно со сжатием импульсов.
Рисунок 22Связь SRIO выполняется параллельно с обработкой.
Перестановка данных
Второй этап в предлагаемом методе соответствует локальной перестановке данных на каждом ядре DSP. Мы предложили и сравнили три различных метода для выполнения этой перегруппировки данных. Первый метод состоит в том, чтобы интегрировать эту перестройку в доплеровскую фильтрацию, второй метод — добиться этого с помощью EDMA, а третий — добиться этого с помощью ЦП.
При выполнении доплеровской фильтрации одного луча на одном ядре DSP время выполнения, когда входные данные хорошо упорядочены, равно 157 мкс.В то время как, когда входные данные неупорядочены и перегруппировка данных интегрирована в обработку, полученное время выполнения равно 514 мкс. Это большое различие происходит из-за того, что механизмы согласованности кэша не работают должным образом, когда входные данные неупорядочены.
Как было показано ранее, DSP C6678 имеет три контроллера EDMA, которые могут работать параллельно. Один EDMA может обеспечить перестройку данных одного луча за 73 мкс. Каждый DSP C6678 должен переставить восемь лучей.Три доступных EDMA обеспечивают перегруппировку данных восьми лучей за 300 мкс.
Каждое ядро DSP выполняет перегруппировку данных одного луча за 108 мкс. Поскольку восемь ядер DSP могут работать параллельно, перегруппировка данных восьми лучей может выполняться за 108 мкс.
Из этого сравнительного исследования, приведенного в таблице 6, эффективным способом выполнения перегруппировки данных второго этапа в предлагаемом методе является его выполнение с использованием ЦП.
Таблица 6 Сравнение методов преобразования данныхВ заключение, предлагаемый метод, который разделяет связь по SRIO между сжатием импульсов и доплеровской фильтрацией на два этапа, значительно оптимизировал время связи с помощью SRIO.
5.2.3 Оптимизация связи между доплеровской фильтрацией и постобработкой в простой модели
Поток данных между доплеровской фильтрацией и постобработкой в простой модели после выбора организации данных, которая оптимизирует постобработку. Обработка представлена на рисунке 23.
Рисунок 23Поток данных между доплеровской фильтрацией и постобработкой в простой модели.
Распределение доплеровской фильтрации производится по размеру луча. Каждое ядро DSP будет обрабатывать один луч. После доплеровской фильтрации ядра DSP не должны связываться друг с другом. Им нужно просто переставить данные локально, прежде чем начать постобработку. Было предложено и сопоставлено три метода для выполнения такой перегруппировки данных. Первый метод заключается в интеграции перегруппировки данных в конце доплеровской фильтрации, второй метод заключается в выполнении этой перегруппировки данных с использованием EDMA, а третий — в выполнении этого с использованием ЦП.Из сравнительного исследования, представленного в таблице 7, наиболее эффективным способом выполнения этой перегруппировки данных является их интеграция в конце доплеровской фильтрации.
Таблица 7 Сравнение методов преобразования данных5.2.4 Синтез оптимизации
Оптимизация, предложенная нами для уменьшения межпроцессорной связи в базовой модели прямого отображения, полностью устранила межпроцессорную связь между формированием диаграммы направленности и сжатием импульсов, а также между доплеровской фильтрацией и постобработка (рисунок 24).В результате обработка формирования диаграммы направленности и сжатия импульсов, а также обработка доплеровской фильтрации и постобработка могут быть объединены в одном блоке (рисунок 25). Предлагаемые оптимизации также значительно сократили межпроцессорную связь между сжатием импульсов и доплеровской фильтрацией. Параллельная машина выполняет 94% межпроцессорной связи параллельно со сжатием импульсов.
Рисунок 24Простая модель после оптимизации.
Рисунок 25Простая модель после предохранителя.
Оптимизация, выполненная для модели прямого отображения, основана на распределении формирования луча и сжатия импульсов на ядрах DSP по размеру импульса (Np) и распределении доплеровской фильтрации и постобработки на ядрах DSP по размеру луча (Nb). Если эти два параметра изменяются и они не равны или не кратны количеству ядер DSP, одно или несколько ядер DSP будут обрабатывать несколько лучей или импульсов или останутся в режиме ожидания.Изменение других параметров цепочки обработки импульсно-доплеровского радиолокационного сигнала, таких как количество диапазонов (Nr), количество каналов (Nc) и количество доплеровских фильтров (Nd), не влияет на оптимизацию, выполняемую для простой модели.
5.3 Эксперименты и результаты
Результаты реализации сценария использования цепочки обработки импульсно-доплеровского радиолокационного сигнала на предлагаемой параллельной машине с использованием простой модели до оптимизации представлены на рисунке 26.Полученное общее время обработки составляет 10 мс. Это намного больше, чем ограничение реального времени варианта использования, которое составляет около 1,64 мс. Параллельный КПД составляет около 9%. Межпроцессорная связь SRIO занимает 92% от общего времени обработки.
Рисунок 26Результаты внедрения до оптимизации.
Результаты реализации с использованием оптимизированной прямой модели представлены на рисунке 27.Полученное общее время обработки составляет 0,96 мс, что ниже ограничения реального времени. Полученный параллельный КПД составляет около 90%. Предыдущие работы [3, 21–25], в которых использовалась прямая модель для распространения приложения радара на параллельном компьютере на основе межсоединения RapidIO, достигли параллельной эффективности, не превышающей 40%.
Рисунок 27Результаты реализации после оптимизации.
Nifty 50: Радар Доплера
ДОПЛЕР РАДАР
Исследования финансируется NSF в Национальном центре атмосферных исследований (NCAR) и в университетах способствовал развитию доплеровского радара как инструмент метеорологических исследований.
Доплеровский радар — это то, что большинство американцев видит каждый вечер в теленовостях и сводки погоды. Большинство, но не все телеканалы в США теперь имеют Доплеровский радар.
NSF профинансировал NCAR и несколько университетов для внесения важных уточнений к программным и аппаратным технологиям, связанным с доплеровским радаром, которые расширило использование этих радаров как в исследовательских, так и в эксплуатационных целях.
Доплер авансы
Обычный радар предоставляет информацию о местоположении и интенсивности
осадков, связанных со штормом, а доплеровский радар добавляет
способность различать
движение воздуха во время шторма.
Допплер радар помогает ученым и метеорологам видеть или обнаруживать приземный ветер ножницы, которые опасны для самолетов. Доплеровская радиолокационная технология также позволяет метеорологи, чтобы прогнозировать местоположение и суровость погоды с большей точность, что привело к улучшению общедоступных безопасность и, в некоторых случаях, спасение жизней.
Исследование шторма
NSF также принимал участие в разработке наземных и бортовых
Доплеровские радары, которые широко используются в фундаментальных исследованиях
о метеорологических явлениях от торнадо до сильных зимних бурь.
Недавним значительным достижением стал сбор подробной информации.
трехмерный
распределение ветра и осадков вблизи вихрей торнадо. такая информация начинает раскрывать природу
процессы образования и рассеивания этих очень разрушительных и опасных для жизни
бури.
Почему график БПФ импульсного доплеровского радара является зеркальным? (Видео)
Когда дело доходит до радара, для преобразования сигналов временной области в частоты используется БПФ (быстрое преобразование Фурье).Примером его использования является преобразование двойных каналов импульсного доплеровского радара из временной области в данные дальномерного доплеровского сдвига.
Типичный сигнал, отраженный обратно от объекта к радару, может выглядеть так, как на рисунке 1, когда он оцифрован аналого-цифровой (A / D) платой радара. Плата A / D преобразует радиочастотные сигналы в цифровые для обработки. Если мы возьмем БПФ этого сигнала, результат будет показан на рисунке 2. Часто задают вопрос: «Почему график БПФ импульсного доплеровского радара является зеркальным?
Ответ заключается в том, что это не зеркальное отображение.Одна половина графика — отрицательные частоты, а другая половина графика — положительные частоты (см. Рисунок 3). Чтобы сделать график более понятным, нам нужно изменить порядок индексов на оси абсцисс. На Рисунке 4 показан Рисунок 2 с измененным порядком индексов, показанным красным. Как вы можете видеть на этом графике, зеркальное отображение исчезло, и сильный отклик нанесен в центр графика.
Рис. 1. Радиолокационный сигнал в приемнике после применения демодуляции.
Рисунок 2. Это график БПФ сигнала на рисунке 1.
Рис. 3. Пояснение к графику БПФ. Хотя индексы линейно растут, их представление данных противоречит здравому смыслу.
Рис. 4. После изменения порядка индексов красная линия выше представляет типичное представление графика БПФ радиолокационного сигнала. Обратите внимание, что красные числа под осью x — это новые упорядоченные индексы.
Для импульсного доплеровского радара индексы могут быть объединены с PRF (частотой повторения импульсов) и переданной частотой для получения скорости по оси x этих графиков.Скорость — это вектор, поэтому отрицательная скорость означает, что объект удаляется от радара, а положительная скорость означает, что он приближается к радару. PRF — это количество импульсов, передаваемых радаром в секунду.
Чтобы преобразовать волновые числа оси x в доплеровские скорости, нам нужно сначала вычислить максимальную однозначную скорость радара. Максимальная однозначная скорость импульсного доплеровского радара вычисляется по формуле:
Макс.радиальная скорость (м / с) = V rmax = C * f PRF / (4 * f TX ),
где C = скорость света (м / с),
f PRF = PRF (Гц)
f TX = частота передачи (Гц).
После вычисления этой скорости мы можем вычислить доплеровское разрешение для радара по формуле:
Доплеровское разрешение (м / с) = Vrmax / (количество интегрированных импульсов / 2).
Импульсный доплеровский радар интегрирует импульсы во времени для вычисления доплеровских скоростей. Это также приводит к тому, что интегральная мощность значительно превышает мощность одиночного импульса. Новая ось x создается путем умножения переупорядоченных индексов на разрешение Доплера, как показано на рисунке 5.
Рисунок 5 построен для радара с частотой передачи 10 ГГц, частотой повторения импульсов 4000 Гц и интегрированием 128 импульсов.Используя приведенные выше уравнения, Vrmax = +/- 30 м / с, а доплеровское разрешение = 0,46875 м / с.
Рисунок 5. Используя PRF и передаваемую частоту, индексы могут быть преобразованы в доплеровскую скорость.
Метров в секунду обычно не используется для измерения скорости, поэтому мы можем использовать преобразование V км / ч = (V м / с /1000) * 3600. На рисунке 6 показан тот же график, что и на рисунке 5, но с преобразованием оси x в километры в час (км / ч).
Рисунок 6.Это доплеровский график с рисунка 5 с преобразованием оси x в километры в час.
Как указывалось ранее, максимальная скорость, которую может измерить импульсный доплеровский радар в этом примере, составляет +/- 30 м / с, что составляет +/- 108 км / ч. Что произойдет, если объект движется с радиальной скоростью (скоростью по направлению к радару или от него), превышающей 108 миль в час? Его скорость обернется отрицательной стороной сюжета. Вот почему для этих максимумов используется термин «однозначная скорость (или скорость)».Разработчики радаров должны тщательно проектировать свои радиолокационные системы так, чтобы интересующий объект появлялся в этих максимальных пределах. Чтобы решить проблему обнаружения объектов с неоднозначной скоростью, разработчик радара может увеличить частоту PRF или снизить передаваемую частоту. Поскольку после создания радара изменить передаваемую частоту труднее, легче изменить PRF.
На рисунке 6 мы видим, что сигнатура объекта разнесена на 0 Гц. В данном конкретном случае это связано с тем, что на рисунке 1 подпись была конечной.Это артефакт БПФ конечного сигнала. Чем шире этот сигнал на рисунке 1, тем уже будет сигнатура на рисунке 6. Но могут быть и другие причины разброса сигнатуры импульсного доплеровского радара. К ним относятся:
- Объект качается или имеет части, которые движутся относительно основного тела. Если человек качается или его руки или кисти движутся, сигнал может распространяться по соседним ячейкам Доплера при нулевом Доплеровском режиме. Это можно увидеть на деревьях, ветви которых раскачиваются на ветру.
- Отраженный от объекта сигнал может быть настолько сильным, что насыщает приемник радара. Думайте о насыщении как о питье воды из садового шланга на полную мощность. Вы не можете пить достаточно быстро, поэтому вы теряете воду на землю. То же самое и с радаром. Принимаемый сигнал настолько силен, что превышает способность радара поглотить его полностью. Сигнал ограничен, что означает потерю информации о сигнале. Это приводит к доплеровскому распространению вокруг сигнатуры основного тела при прохождении через БПФ.
- Отказ компонента радара может привести к доплеровскому расширению и многим другим артефактам на графике БПФ. Например, если радар теряет когерентность (обычно это происходит из-за неисправного компонента, такого как локальный осциллятор), то доплеровский сигнал может распространяться или действительно отражаться на обеих сторонах графика.
Независимо от причины доплеровского расширения в сигнатуре объекта, вы увидите расширяющуюся каплю на обоих концах спектра для медленно движущегося объекта, если вы забудете изменить порядок индексов.Если вы правильно изменили порядок индексов, вы увидите это как одну каплю в центре или рядом с центром.
Другой пример зеркального отображения:
Рисунок 6 представляет доплеровскую сигнатуру объекта на заданном расстоянии. График можно преобразовать в один ряд цветных прямоугольников, как показано на рисунке 7. На этом рисунке для БПФ используется 16 импульсов, что дает 16 столбцов. Величина Доплера представлена в цвете. Переупорядочивание индексов на рисунке 7 не производилось, поэтому сигнатура медленно движущегося объекта будет отображаться на внешних краях графика, как показано на рисунке 8.Изменение порядка индексов позволит доплеровским сигнатурам для медленно движущегося объекта появиться в центре (см. Рисунок 9). Дополнительные ряды ящиков могут быть уложены друг на друга, что означает увеличение дальности при движении вверх. Это показано на рисунке 10 и обычно называется диаграммой доплеровского диапазона.
Рис. 7. График БПФ можно также представить в виде ряда прямоугольников, где уровень сигнала представлен цветом.
Рис. 8. Это показывает, что объект вошел в зону действия, контролируемую радаром.Красные прямоугольники на графике без изменения порядка указывают на то, что объект почти неподвижен.
Рисунок 9. Это рисунок 8 после изменения порядка индексов и преобразования доплеровской частоты в скорость.
Рис. 10. Это диаграмма дальномерного допплера. Доплеровская скорость указывается для каждого диапазона.
Посмотрите это видео с дальномером, на котором изображен человек, идущий на улице:
Рисунок 11 — это диаграмма дальности-доплера для радара X-диапазона, предназначенного для обнаружения людей.Сюжет был изменен и показывает идущего человека, удаляющегося от радара. Однако с правой стороны есть меньшая подпись, которая является результатом движения рук и ног человека в сторону радара.
Рис. 11. Верхний график представляет собой пиковый доплеровский сигнал, видимый на расстоянии от 0 до 65 метров от радара. Нижний график — это график доплеровского диапазона, который также известен как график доплеровской интенсивности во времени.
Частота повторения импульсов (PRF): частота, с которой импульсы передаются радаром в секунду.
Доплер: изменение частоты, вызванное движением объекта. Частота, излучаемая радиолокационным передатчиком, смещается вверх, если объект движется к радару, и вниз, если объект движется от радара.
Доплеровское разрешение: это наименьшее приращение скорости, которое может обнаружить импульсный доплеровский радар. Радар, который пытается обнаружить движение людей, будет иметь разрешение Доплера несколько сантиметров в секунду.
График БПФ (график доплеровского диапазона): БПФ используется для преобразования данных радара во временной области в частотную область.Обнаруженные объекты и их доплеровская подпись отображаются на графике БПФ. Ось X представляет доплеровскую частоту (которая может быть преобразована в доплеровскую скорость), а ось Y — диапазон. График доплеровской дальности также называется графиком доплеровской интенсивности во времени, особенно если он записан как поток данных.