
Зачем нужен квадрокоптер и что с ним делать?
|
Раньше беспилотники были чем-то из области фантастики, но время не стоит на месте, сейчас они стали более доступны и активно входят в нашу жизнь. Google и Tesla тестируют беспилотные автомобили на улицах городов, военная промышленность успешно использует беспилотные самолеты. Еще одно применение эта технология нашла в летающих дронах с камерой — квадрокоптерах. Благодаря своим возможностям они могут залететь в самые удивительные места. Мы нашли несколько способов использования квадрокоптеров.
Для съемки видео, клипов и фильмовТем, кто ведет блог, снимает тест-драйвы, влоги, клипы и т.
Для проведения личных и коммерческих фотосессийКвадрокоптер можно использовать для различных креативных фотосессий. С их помощью можно наиболее полно снимать и фотографировать различные спортивные, коммерческие и светские мероприятия, с большим числом участников. А также проводить личные фотосессии, съемку свадеб и торжеств.
Для поиска людей и объектовНа мощные модели квадрокоптеров можно установить профессиональную аппаратуру. Камеры с высоким разрешением проводят детальную съемку местности и помогают найти потерянные объекты. Высокоточные тепловизоры можно использовать для очень важного дела — поиска пропавших людей в темное время суток, в лесах, пустынях и непроходимых местах. Для этого нужен коптер с широким радиусом полета, большой длительностью работы, способный выдержать вес прибора.
Для полетов в городе и на природеВ игровом плане квадрокоптер — как радиоуправляемый вертолет с камерой, только более устойчивый в воздухе, благодаря нескольким винтам и системе стабилизации.
Для развлечения и розыгрышейЧто только не делают с дронами изобретательные люди. Например передают друг другу приятные посылки и записки. Или привязывают к нему фальшивые купюры на ниточку и разыгрывают людей. Один шутник из Америки даже сделал костюм для дрона — теперь это привидение пугает всю округу. А некоторые компании используют дроны для привлечения внимания во время рекламных акций. Обратите внимание: в России, для полетов на высоте более 50 м, необходимо согласование с Росавиацией. Посмотреть подробные характеристики и купить квадрокоптер для новичка или профессионала Вы можете в нашем интернет-магазине.
|
|
 д. летающий дрон поможет выйти на новый уровень. Съемка на разной высоте, в движении, на сложной местности, панорамная и круговая съемка — все это доступно для квадрокоптера. Система стабилизации убирает раскачивание и тряску, за счет чего получается качественное видео. Профессиональные модели заменяют съемку с вертолета и используются даже на съемках высокобюджетных фильмов.
д. летающий дрон поможет выйти на новый уровень. Съемка на разной высоте, в движении, на сложной местности, панорамная и круговая съемка — все это доступно для квадрокоптера. Система стабилизации убирает раскачивание и тряску, за счет чего получается качественное видео. Профессиональные модели заменяют съемку с вертолета и используются даже на съемках высокобюджетных фильмов.


разбираемся в простых игрушках с ценой до 30 000 рублей
Елена,
Беспилотников становится все больше. Из техники военного назначения, эти дистанционно управляемые летательные аппараты успешно перешли в категорию любимых игрушек для взрослых. Сегодня купить квадракоптер может любой желающий – благо рынок предлагает большой выбор моделей.
Зачем нужны дроны? Понятно, что здорово запустить в небо радиоуправляемый вертолет. И еще раз, и еще. А потом дать позапускать его друзьям и наслаждаться завистливыми возгласами. Можно устроить гонки квадрокоптеров. К примеру, радиоуправляемый 350-граммовый дрон Walkera Runner 250 Race Quadcopter RTF разгоняется до максимума практически мгновенно. Модель миникоптера Parrot Minidrone Swing мало того, что носится, как пуля, так еще управляется со смартфона и внешне напоминает миниатюрный корабль пришельцев. А дрон Blade® Nano QX 3D умеет летать пузом к верху и оснащен механизмом выравнивания и стабилизации полета.
А дрон Blade® Nano QX 3D умеет летать пузом к верху и оснащен механизмом выравнивания и стабилизации полета.
Но многим владельцам квадрокоптеров недостаточно просто пилотировать, им нужно больше. И именно эти экспериментаторы-энтузиасты придумывают для коптеров новые применения. А крупные компании, к примеру, Амазон, вплотную рассматривают возможность внедрения инновационных решений по улучшению транспортировки посылок с использованием квадрокоптеров.
Улыбайтесь, вас снимают
Человек, придумавший, закрепить на квадрокоптере видеокамеру, несомненно, был гением. Летающая камера позволила изучать труднодоступные местности, наблюдать за животными в естественной среде обитания, отслеживать состояние озонового слоя, охранять границы и важные объекты. Возможности квадрокоптеров успели оценить рекламщики, папарацци, организаторы свадебных церемоний, экстремалы всех мастей и спортсмены. Но что значат все научные достижения мира на фоне дрон-сэлфи.
Дайте человеку дрон, и вопрос «Зачем нужен квадрокоптер с камерой?» даже не придет ему в голову. Конечно, никто не умаляет заслуг квадрокоптеров в создании уникальных кадров с высоты птичьего полета и великолепных панорамных съемок. Но в первую очередь человек с летающей камерой будет снимать себя любимого. А с учетом того, что современные коптеры умеют четко держать заданную высоту, следуют за своим владельцем, как на привязи, и транслируют видео в режиме онлайн, как Hubsan X4 FPV H501S, снимать видео – одно удовольствие. А с мини-коптером Parrot Minidrone Hydrofoil NewZ можно делать фантастические снимки в море. У этого малыша с катерной конструкцией имеются подводные пропеллеры, удерживающие его над водой.
Конечно, никто не умаляет заслуг квадрокоптеров в создании уникальных кадров с высоты птичьего полета и великолепных панорамных съемок. Но в первую очередь человек с летающей камерой будет снимать себя любимого. А с учетом того, что современные коптеры умеют четко держать заданную высоту, следуют за своим владельцем, как на привязи, и транслируют видео в режиме онлайн, как Hubsan X4 FPV H501S, снимать видео – одно удовольствие. А с мини-коптером Parrot Minidrone Hydrofoil NewZ можно делать фантастические снимки в море. У этого малыша с катерной конструкцией имеются подводные пропеллеры, удерживающие его над водой.
А зачем нужен квадрокоптер именно вам?
Тысячи владельцев радиоуправляемых дронов ежедневно придумывают новые способы использования летающих машинок. Квадрокоптеры позволяют почувствовать себя настоящим журналистом, дают возможность продемонстрировать роскошную картинку, снятую с точки, недоступной человеку. Легендарные Фантомы (DJI Phantom) относятся к любительскому оборудованию, но осуществляют профессиональную фото и видео съемку, а управлять ими сможет даже ребенок.
Квадрокоптером можно транспортировать мелкие предметы. Крупные и тяжелые вещи дрон не потянет, но баночку пива оттранспортирует без проблем. Французский квадракоптер Parrot Minidrone Mambo оснащен специальным захватом для переноски грузов, а еще вооружен «пушкой», стреляющей шариками. Берегись соседский кот!
Многие модели квадрокоптеров (например, Cheerson CX-20) оснащены функцией автопилота. С ней дрон не потеряется, даже если вылетит из поля зрения и потеряет сигнал с пульта управления. В памяти вертолета заложена команда возврата в точку взлета, причем путь к месту возвращения коптер проложит самостоятельно.
Один американский папочка стал объектом ожесточенных перепалок, позволив своей восьмилетней дочери самостоятельно ходить в школу. Пойдя навстречу самостоятельной малышке, папа подстраховался и всю дорогу контролировал ее с помощью коптера. Его идея не нашла отклика у других родителей, зато воодушевила многих собачников. Благодаря квадрокоптеру, владельцам четвероногих совсем не обязательно маяться под дождем.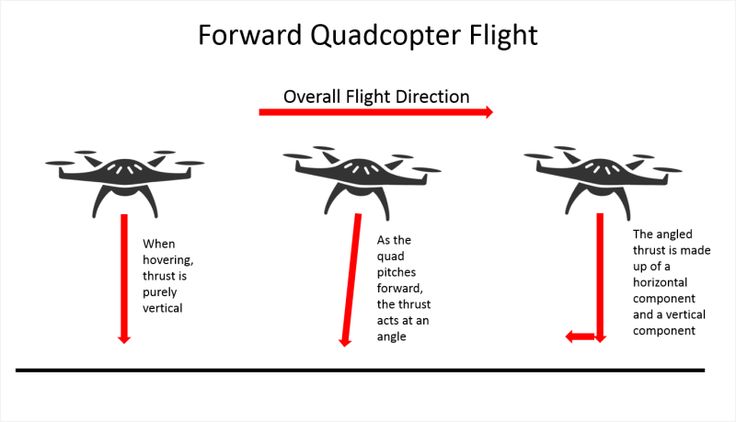 Можно запустить дрон, например, SYMA X8G, и наблюдать, как псинка сделает свои дела, не выходя из дома.
Можно запустить дрон, например, SYMA X8G, и наблюдать, как псинка сделает свои дела, не выходя из дома.
Каталог дронов в Интернет-магазине Medgadgets.
Метки дрон, Квадрокоптер, коптер, подборка
Как работает квадрокоптер вместе с пропеллерами и моторами
Понимание направления двигателя дрона и пропеллера, а также конструкция показывают нам, как работает квадрокоптер.
Современные квадрокоптеры очень легко летают в любом направлении. Они также могут очень плавно зависать на месте. Инженерия и дизайн отличаются от самолета или вертолета для полета.
В этом посте мы рассмотрим, как летает квадрокоптер, требуемое направление двигателя, конфигурацию, настройку, конструкцию пропеллера, а также тягу двигателя квадрокоптера и необходимые расчеты.
Есть также несколько отличных видеороликов и ссылок на очень интересные соответствующие статьи для дальнейшего чтения о том, как летает квадрокоптер.
Как работает квадрокоптер Итак, как квадрокоптер парит или летит в любом направлении, поднимается или опускается в момент касания стика пульта дистанционного управления. Дроны также могут летать автономно через запрограммированное программное обеспечение для навигации по путевым точкам и летать в любом направлении от точки к точке. Итак, давайте посмотрим на технологию квадрокоптера, которая делает это возможным.
Дроны также могут летать автономно через запрограммированное программное обеспечение для навигации по путевым точкам и летать в любом направлении от точки к точке. Итак, давайте посмотрим на технологию квадрокоптера, которая делает это возможным.
Направление пропеллера вместе с вращением и скоростью двигателя дрона делают его полет и маневренность возможными.
Контроллер полета квадрокоптера отправляет информацию двигателям через их электронные схемы управления скоростью (ESC) о тяге, оборотах в минуту, (оборотов в минуту) и направлении. Контроллер полета также будет объединять данные IMU, гироскопа и GPS, прежде чем сигнализировать двигателям квадрокоптера о тяге и скорости вращения ротора.
Несмотря на то, что сегодняшние технологии дронов и квадрокоптеров полностью современны, они все еще используют старые принципы полета самолета, гравитации, действия и реакции.
При изготовлении квадрокоптеров, пропеллеров и двигателей также важно учитывать 4 силы, влияющие на весь полет (вес, подъемная сила, тяга и сопротивление).
Математика также используется для расчета тяги двигателя квадрокоптера, в то время как аэродинамика самолета используется для проектирования пропеллера и движения воздуха над, под и вокруг квадрокоптера.
Важность того, как работает и летает квадрокоптерС небольшим опытом управление квадрокоптером становится автоматическим. Вы перемещаете стики на наземной станции дистанционного управления, которые направляют квадрокоптер в любом направлении, в котором вы хотите, чтобы он летал. Нам не нужно думать о том, что делают двигатели или пропеллеры.
Теперь предположим, что ваш квадрокоптер летел неправильно. Возможно, он тянет в одном направлении или зависает не плавно. Что ж, понимание того, как работает и летает квадрокоптер, поможет вам определить проблему с двигателем или пропеллером, особенно если визуальный осмотр не выявил неисправности.
Когда вы понимаете конструкцию пропеллера квадрокоптера и тягу двигателя, вы можете вносить изменения в свой квадрокоптер, например, снимать камеру и устанавливать другую полезную нагрузку, например датчик времени полета или лидар.
Полеты с другой полезной нагрузкой повлияют на управление, полет и баланс дрона. Тогда другая полезная нагрузка потребует другой тяги двигателя квадрокоптера.
Если вы строите или проектируете квадрокоптеры, понимание конструкции двигателя и пропеллера является важной информацией. Вам нужна правильная конфигурация двигателя квадрокоптера, соответствующие пропеллеры, электронные схемы управления скоростью, а также IMU и GPS вместе с правильным корпусом.
Если вы хотите узнать больше обо всех других компонентах, из которых состоит наш обычный дрон, прочитайте эту потрясающую статью о всех типах технологий дронов.
Хорошо, давайте теперь посмотрим, как летает дрон, а именно на пропеллер квадрокоптера, направление и дизайн двигателя.
Объяснение направления двигателя и пропеллера квадрокоптера Как летает квадрокоптер По сути, движение стиков дистанционного управления посылает сигналы на центральный контроллер полета. Этот центральный контроллер полета отправляет эту информацию на электронные контроллеры скорости (ESC) каждого двигателя, которые, в свою очередь, направляют свои двигатели на увеличение или уменьшение скорости.
Этот центральный контроллер полета отправляет эту информацию на электронные контроллеры скорости (ESC) каждого двигателя, которые, в свою очередь, направляют свои двигатели на увеличение или уменьшение скорости.
Движение ручки дистанционного управления → Центральный контроллер полета → Электронные схемы управления скоростью (ESC) → Двигатели и пропеллеры → Движение или зависание квадрокоптера.
Центральный контроллер полетаТеперь центральный контроллер полета также получает информацию от IMU, гироскопа, модулей GPS и датчиков обнаружения препятствий, если они установлены на квадрокоптер. Он выполняет вычислительные расчеты с использованием запрограммированных параметров полета и алгоритмов, а затем отправляет эти данные на электронные регуляторы скорости.
Фактически, большинство полетных контроллеров включают в себя IMU, GPS, гироскоп и множество других функций для управления полетом и стабильностью квадрокоптера. Довольно часто они имеют двойные IMU для резервирования и других функций безопасности, таких как Return-To-Home.
Примером центрального контроллера полета может быть новый контроллер полета DJI N3. Он имеет множество функций и может работать с различными двигателями.
Электронные схемы управления скоростью (ESC)Каждый двигатель квадрокоптера имеет схему, называемую электронной регулировкой скорости (ESC). Электронный регулятор скорости — это электронная схема, предназначенная для изменения скорости электродвигателя, его направления, а также торможения.
Электронные регуляторы скорости являются важным компонентом современных квадрокоптеров. Они обеспечивают высокую мощность, высокую частоту и высокое разрешение трехфазного переменного тока для двигателей. В то же время эти ESC действительно маленькие и компактные.
Квадрокоптеры и дроны полностью зависят от переменной скорости двигателей, приводящих в движение пропеллеры. Это широкое разнообразие и тяга RPM, а также контроль скорости двигателя / пропеллера дают квадрокоптеру все необходимое управление для полета.
Чтобы узнать больше об электронных регуляторах скорости, просмотрите это потрясающее видео под названием «Основы радиоуправления — регуляторы скорости».
Двигательная установка дронаРегуляторы скорости вращения являются одним из очень важных компонентов двигательной установки дрона. ESC должны иметь соответствующие двигатели дрона, которые, в свою очередь, должны иметь совместимые пропеллеры. Вот список компонентов двигателя и силовой установки дрона;
- Статор двигателя
- Моторный звонок (ротор)
- Обмотки
- Подшипники
- Система охлаждения
- Электронные регуляторы скорости
- Программа обновления ESC
- Пропеллеры
- Проводка
- Рука
Чтобы квадрокоптер поднялся в воздух, должна быть создана сила, равная или превышающая силу тяжести. Это основная идея подъемной силы самолета, которая сводится к управлению восходящей и нисходящей силой.
Это основная идея подъемной силы самолета, которая сводится к управлению восходящей и нисходящей силой.
Теперь квадрокоптеры используют конструкцию двигателя и направление пропеллера для движения, чтобы в основном контролировать силу тяжести, воздействующую на квадрокоптер.
Вращение лопастей пропеллера квадрокоптера толкает воздух вниз. Все силы действуют парами (третий закон Ньютона), что означает, что для каждой силы действия существует равная (по величине) и противоположная (по направлению) сила противодействия. Следовательно, когда ротор давит на воздух, воздух давит на ротор вверх. Чем быстрее вращаются роторы, тем больше подъемная сила и наоборот.
Теперь дрон может делать три вещи в вертикальной плоскости: зависать, подниматься или опускаться.
Наведение 900:12 — Для зависания чистая тяга четырех винтов толкает дрон вверх и должна быть точно равна силе гравитации, тянущей его вниз.
Climb Ascend — Путем увеличения тяги (скорости) четырех роторов квадрокоптера, чтобы восходящая сила превышала вес и силу тяжести.
Прежде чем углубляться в настройку двигателя и пропеллера квадрокоптера, давайте немного объясним терминологию, используемую, когда он летит вперед, назад, вбок или вращается во время зависания. Они известны как тангаж, крен и рыскание.
Рыскание — Это вращение или поворот головы квадрокоптера вправо или влево. Это основное движение для вращения квадрокоптера. На большинстве дронов это достигается перемещением левой ручки газа влево или вправо.
Шаг — это движение квадрокоптера вперед и назад. Шаг вперед обычно достигается нажатием ручки газа вперед, что заставляет квадрокоптер наклоняться и двигаться вперед, от вас. Шаг назад достигается перемещением ручки газа назад.
Roll — Большинство людей путают с Roll and Yaw. Крен заставляет квадрокоптер лететь боком, влево или вправо. Крен управляется правой ручкой газа, заставляя его лететь либо влево, либо вправо.
Большинство высокотехнологичных дронов, таких как квадрокоптер Yuneec Q500 4k, позволяют управлять им двумя разными способами. Вы можете управлять дроном, как если бы вы были пилотом и на самом деле в квадрокоптере. Вы используете ручки управления по-разному, независимо от того, приближается ли дрон к вам или улетает от вас.
Вот короткое видео, в котором очень просто показано, что такое движения по крену, тангажу и рысканию.
Направление двигателя квадрокоптера Для отклонения от курсаОтклонение или вращение головы квадрокоптера вправо или влево. На дронах, таких как DJI Mavic Pro или последний Mavic 2 Pro, движение по рысканью управляется правым джойстиком на пульте дистанционного управления. Перемещение стика влево или вправо заставит квадрокоптер поворачиваться влево или вправо.
Движение наземной станции дистанционного управления отправляет сигналы на контроллер полета, который, в свою очередь, отправляет данные для цепей ESC квадрокоптера, которые управляют конфигурацией двигателей и скоростью двигателей.
Чтобы увидеть, как это работает на самом деле, взгляните на приведенную ниже схему конфигурации пропеллера квадрокоптера. На диаграмме показан квадрокоптер DJI Phantom 3, вид сверху с роторами, помеченными цифрами от 1 до 4. ), а двигатели 1/3 вращаются по часовой стрелке (двигатели CW). С двумя наборами двигателей квадрокоптера, настроенных на вращение в противоположных направлениях, общий угловой момент равен нулю.
Угловой момент — это вращательный эквивалент линейного количества движения, который рассчитывается путем умножения угловой скорости на момент инерции. Что такое момент инерции? Это похоже на массу, за исключением того, что имеет дело с вращением. Угловой момент зависит от того, насколько быстро вращаются роторы.
Концептуально, момент инерции можно рассматривать как представление сопротивления объекта изменению угловой скорости.
Если на двигателях квадрокоптера нет крутящего момента, то общий угловой момент должен оставаться постоянным, равным нулю. Чтобы понять угловое движение вышеупомянутого квадрокоптера, подумайте о 2 и 4 синих роторах против часовой стрелки, имеющих с положительным угловым моментом и зеленые двигатели квадрокоптера, вращающиеся по часовой стрелке, с отрицательным угловым моментом. Я назначу каждому двигателю значение -4, +4, -4, +4, что равно нулю
Чтобы понять угловое движение вышеупомянутого квадрокоптера, подумайте о 2 и 4 синих роторах против часовой стрелки, имеющих с положительным угловым моментом и зеленые двигатели квадрокоптера, вращающиеся по часовой стрелке, с отрицательным угловым моментом. Я назначу каждому двигателю значение -4, +4, -4, +4, что равно нулю
Чтобы повернуть дрон вправо, затем уменьшите угловую скорость двигателя 1, чтобы получить угловой момент -2 вместо -4. Если бы ничего другого не произошло, общий угловой момент квадрокоптера теперь был бы +2. Такого не может быть. Теперь дрон будет вращаться по часовой стрелке, так что угловой момент корпуса дрона будет равен -2.
Уменьшение скорости вращения ротора 1 действительно привело к вращению дрона, но также вызывает проблему. Это также уменьшило тягу двигателя 1. Теперь результирующая восходящая сила не равна силе гравитации, и квадрокоптер опускается.
Также тяга двигателя квадрокоптера неодинакова, поэтому квадрокоптер становится неуравновешенным.
Для вращения дрона без создания вышеуказанных дисбалансов необходимо уменьшение скорости вращения двигателей 1 и 3 с увеличением скорости вращения роторов 2 и 4.
Угловой момент роторов по-прежнему не равен нулю, поэтому корпус дрона должен вращаться. Однако общая сила остается равной силе гравитации, и дрон продолжает зависать. Поскольку нижние упорные винты расположены по диагонали друг от друга, дрон все еще может оставаться сбалансированным.
Объявление: Проверьте это превосходное предложение DJI Mavic 2 Zoom на Amazon.
Направление винта квадрокоптера для тангажа и крена Поскольку большинство квадрокоптеров симметричны (например, DJI Phantom 4 Pro V2, Autel X-Star и дрон Holy Stone HS 100), нет никакой разницы между движением вперед или назад. То же самое и с движением из стороны в сторону. Как лететь вперед также объясняет, как лететь назад или вбок.
Чтобы лететь вперед, необходимо увеличить обороты двигателя квадрокоптера (скорость вращения) роторов 3 и 4 (задние двигатели) и уменьшить скорость вращения роторов 1 и 2 (передние двигатели). Суммарная сила тяги останется равной весу, поэтому дрон останется на том же вертикальном уровне.
Кроме того, поскольку один из задних роторов вращается против часовой стрелки, а другой по часовой стрелке, увеличенное вращение этих двигателей по-прежнему будет производить нулевой угловой момент. То же самое относится и к передним роторам, поэтому дрон не вращается.
Однако большая сила в задней части дрона означает, что он будет наклоняться вперед. Теперь небольшое увеличение тяги для всех роторов создаст результирующую силу тяги, которая имеет компонент для балансировки веса вместе с компонентом поступательного движения.
Видео о том, как работает квадрокоптер Вот отличное видео, которое очень доступно объясняет, как работает и летает квадрокоптер.
В следующем видео обсуждается направление двигателя квадрокоптера.
Как работают двигатели квадрокоптераВыше мы обсуждали, как работают двигатели и пропеллеры квадрокоптера. Вот некоторая дополнительная информация о двигателях для квадрокоптеров с учетом последних разработок и инноваций в технологии двигателей, а также ведущих брендов.
Бесколлекторные двигатели для квадрокоптеров Почти все квадрокоптеры, выпущенные за последние несколько лет и планируемые к выпуску, используют бесколлекторные электродвигатели. Бесщеточные двигатели квадрокоптера более эффективны, надежны и тише, чем щеточные двигатели. Тип двигателя и его конструкция очень важны.
Стабильность очень важна для квадрокоптера, поэтому верхние двигатели производят очень небольшую вибрацию двигателя, а это означает, что контроллеру полета требуется меньше усилий для поддержания устойчивости квадрокоптера.
Вот 2 отличные статьи, в которых рассказывается все о бесколлекторных двигателях и о том, как выбрать двигатель для квадрокоптера.
- Бесколлекторные двигатели и принципы их работы
- Как выбрать двигатели для квадрокоптера
У квадрокоптера должно быть 4 двигателя. Чтобы квадрокоптер был сбалансирован, вращение пропеллера должно быть направлено к основному корпусу квадрокоптера. Для этого вам необходимо настроить двигатель квадрокоптера следующим образом:
- Передний левый — двигатель по часовой стрелке (CW)
- Передний правый — двигатель против часовой стрелки (против часовой стрелки)
- Задний левый — двигатель против часовой стрелки (CCW)
- Задний правый — двигатель по часовой стрелке (CW)
Примечание: Убедитесь, что гребные винты на двигателях расположены правильно. Вы хотите установить пропеллер против часовой стрелки на двигатели против часовой стрелки и т. д.
Вы хотите установить пропеллер против часовой стрелки на двигатели против часовой стрелки и т. д.
В настоящее время DJI является крупнейшим производителем потребительских и профессиональных мультикоптеров. Они поставляют на рынок 70% дронов. Они также производят отличный ассортимент стабилизаторов и камер Zenmuse.
В последние годы они производят первоклассные двигатели для квадрокоптеров и мультикоптеров для собственных дронов, а также силовые установки, которые каждый может купить и использовать для создания собственного БПЛА.
Новейшие мультикоптерные двигатели от DJI: E5000, E2000, Snail и E305.
Все их новейшие двигатели или силовые установки содержат двигатель квадрокоптера, винты, электронные схемы управления скоростью и систему охлаждения. Двигатель DJI E5000 и большинство других двигателей защищены от дождя.
Теперь мы видим, как квадрокоптеры используются на фермах для обследования земли, заборов и зданий, а также для наблюдения за посевами. Мультикоптеры также можно использовать для опрыскивания сельскохозяйственных культур с помощью квадрокоптера DJI MG-1S, специально созданного для этой цели. При опрыскивании сельскохозяйственных культур важно иметь герметичный двигатель.
Компания T-Motor — двигатели, регуляторы скорости и пропеллерыТакже известна как Tiger Motor, производящая передовые силовые установки для БПЛА. Они специализируются на двигателях, ESC и пропеллерах. T-Motor производит двигатели для квадрокоптеров высочайшего качества, которые широко используются для аэрофотосъемки, промышленного, сельскохозяйственного и коммерческого применения.
Двигатели от T-MotorT-Motor Модельный ряд из 32 двигателей:
- 4 ЕВ Мощность
- 4 U Эффективный тип
- 4 двигателя типа P
- 8 Тип навигации
- 4 FPV типа
- 4 Антигравитационный
- 4 Тип карданного подвеса
T-Motor имеет 17 следующих типов цепей ESC;
- 4 Серия Альфа
- Серия 4 пламени
- 3 Воздушная серия
- 4 серии FPV
- 2 серии T
Схемы ESC действительно высокого качества. Давайте кратко рассмотрим функции T-Motor Alpha 40A LV ESC.
Давайте кратко рассмотрим функции T-Motor Alpha 40A LV ESC.
Alpha 40A LV — это регулятор скорости с низким уровнем шума, температуры и помех, который очень быстро реагирует.
Технология Field Oriented Control (FOC) – принцип FOC заключается в управлении выходной мощностью двигателя посредством регулировки тока и угла, которые управляют магнитным полем и крутящим моментом двигателя.
Серия T-Motor Alpha содержит следующие интеллектуальные функции и средства защиты двигателя;
- Защита от короткого замыкания
- Защита от перегрузки по току
- Защита от потери дроссельной заслонки
- Защита двигателя от блокировки
- Защита от низкого напряжения
- Антикоррозийный
- Пыленепроницаемый и водонепроницаемый
- Нанопокрытие
- Сверхлегкий корпус
- Эффективное охлаждение
Ассортимент пропеллеров T-Motor широк: FPV, сверхлегкие, полированные, складные из пластика и углеродного волокна различных размеров.
Вот статья, в которой показано, как рассчитать тягу двигателя квадрокоптера с помощью математической формулы.
В Интернете также есть несколько калькуляторов тяги двигателя квадрокоптера. Вот 3 наиболее часто используемых калькулятора тяги и подъемной силы квадрокоптера;
- Калькулятор тяги мультикоптера eCalc
- Калькулятор подъемной силы квадрокоптера DriveCalc
- Калькулятор тяги GoBrushless
Пропеллеры для квадрокоптеров изготавливаются из самых разных материалов, размеров и цен, начиная с нижнего и заканчивая верхним диапазоном. Как правило, более дешевые опоры менее точно изготовлены и более подвержены вибрации.
Это особенно относится к относительно большей части спектра винта, при этом различия становятся менее заметными для небольших судов. Если вы летите на квадрокоптере с намерением снимать лучшие аэрофотоснимки или фильмы, то стоит потратиться на пропеллеры высшего качества. Кроме того, используйте качественный Prop Balancer, чтобы проверять пропеллеры вашего квадрокоптера каждые несколько полетов.
Если вы летите на квадрокоптере с намерением снимать лучшие аэрофотоснимки или фильмы, то стоит потратиться на пропеллеры высшего качества. Кроме того, используйте качественный Prop Balancer, чтобы проверять пропеллеры вашего квадрокоптера каждые несколько полетов.
Есть три простых измерения, которые следует учитывать при выборе пропеллеров, если вы проектируете или хотите улучшить свой квадрокоптер.
Длина – Первая – длина (диаметр), обычно указывается в дюймах. Длина винта – это диаметр диска, который образует винт при вращении.
Чем выше номинальное значение Kv ваших двигателей, тем меньше должны быть винты. Меньшие винты обеспечивают большую скорость, но снижают эффективность. Большую пропеллерную установку (с соответственно двигателями с низким Kv) легче стабильно летать. Он также потребляет меньше тока и поднимает больший вес.
Если вы собираете квадрокоптер, лучший способ определить правильный диапазон для моторов и пропеллеров — обратиться к рекомендациям производителя.
Шаг стойки – Это второе измерение также очень важно. Размеры винта указаны в виде 21 x 7,0 дюймов (533 x 178 мм), что соответствует системе движения DJI E2000. Первая цифра относится к длине винта, как указано выше. Второй — шаг, определяемый как расстояние, на которое винт будет проталкиваться вперед через твердое тело за один полный оборот. Например, этот гребной винт с шагом 7,0 дюймов будет двигаться вперед на 7,0 дюймов за один оборот.
Отверстие — Последнее известно как измерение диаметра, которое представляет собой просто размер отверстия в центре опоры. Это должно быть согласовано с валом выбранных вами двигателей. Имеются адаптеры для уменьшения диаметра отверстия винта. В качестве альтернативы, некоторые винты, например, производимые T-Motor, используют систему прямого крепления, при которой винты крепят винты непосредственно к головке двигателя.
Самоблокирующийся — Большинство современных квадрокоптеров используют самоблокирующиеся винты. Они называют это «самоблокирующимся», потому что на квадрокоптере 2 двигателя вращаются по часовой стрелке, а другие 2 вращаются против часовой стрелки. Используя резьбу пропеллера, противоположную направлению вращения двигателя, пропеллеры автоматически блокируются и не расшатываются во время полета.
Они называют это «самоблокирующимся», потому что на квадрокоптере 2 двигателя вращаются по часовой стрелке, а другие 2 вращаются против часовой стрелки. Используя резьбу пропеллера, противоположную направлению вращения двигателя, пропеллеры автоматически блокируются и не расшатываются во время полета.
Чем больше шаг, тем выше тяга и необходимая мощность двигателя. Обычно в мультикоптерах используются винты с шагом от 3 до 5 дюймов. Более низкие частоты более эффективны. Чем больше опора (либо увеличивающийся диаметр, либо шаг, либо и то, и другое), тем больше энергии требуется для ее вращения. Тем не менее, больший винт или большая длина шага увеличат скорость вашего самолета, но также потреблят больше энергии.
Вообще говоря, винт с меньшим диаметром или шагом может вращаться быстрее (более высокие обороты), потому что двигателю не нужно прилагать столько усилий, чтобы вращать его, поэтому он потребляет меньший ток. Они, как правило, работают более плавно и чувствуют себя более отзывчивыми на клюшки. Более быстрое изменение числа оборотов из-за меньшей инерции помогает стабильности квадрокоптера.
Они, как правило, работают более плавно и чувствуют себя более отзывчивыми на клюшки. Более быстрое изменение числа оборотов из-за меньшей инерции помогает стабильности квадрокоптера.
Квадрокоптер поставляется с 4 пропеллерами, причем пропеллеры для вращения по часовой стрелке и против часовой стрелки имеют разную конструкцию. Когда вы покупаете или просматриваете гребные винты, вы прочитаете о CW, что означает вращение по часовой стрелке, и CCW, что означает вращение гребных винтов против часовой стрелки.
Следовательно, для создания тяги необходимы соответствующие пропеллеры CCW и CW, а также противоположное движение по рысканию, которое компенсирует друг друга в полете. Чтобы узнать больше о пропеллерах для квадрокоптера, вот хорошая статья под названием «Как выбрать пропеллеры для мини-квадрокоптера».
На изображении ниже показаны винты квадрокоптера DJI Mavic Pro по часовой и против часовой стрелки. Оба отмечены «8330F», что является реквизитом по умолчанию, поставляемым с Mavic Pro. Однако на винте CW он фактически помечен как «8330F CW». Так что хорошо бы внимательно посмотреть на ваши реквизиты, чтобы узнать, являются ли они CW или CCW.
Оба отмечены «8330F», что является реквизитом по умолчанию, поставляемым с Mavic Pro. Однако на винте CW он фактически помечен как «8330F CW». Так что хорошо бы внимательно посмотреть на ваши реквизиты, чтобы узнать, являются ли они CW или CCW.
Материал пропеллера квадрокоптера, как правило, пластик или углеродное волокно. Однако вы также можете купить деревянные пропеллеры, которые вы обычно видите в секторе авиамоделей.
Как выбрать лучший пропеллер для квадрокоптераДалее представлено потрясающее видео, которое поможет вам выбрать лучший пропеллер. Действительно есть над чем подумать.
Как работает квадрокоптер?
Содержание
- 1 Как летают квадрокоптеры
- 2 Моторы
- 3 Пропеллеры
- 4 Электронные регуляторы скорости (ESC)
- 5 Контроллеры полета и приемники 6 Радиопередатчики
- 0086
- 7 Аккумуляторы
- 8 Рама
- 9 Вывод
Квадрокоптеры, дроны — как бы вы их ни называли, эти маленькие устройства одновременно увлекательны и доставляют массу удовольствия! А для тех из вас, кто занимается самостоятельным строительством, квадрокоптер может стать отличным проектом.
Но как именно работает квадрокоптер? Как он летает и какие компоненты вам нужно собрать, чтобы сделать его самостоятельно? Следуй за мной, и я открою для тебя эту тайну.
Как летают квадрокоптеры
В этой статье я сосредоточусь на квадрокоптерах, но многое из того, что я здесь объясняю, применимо и к другим летательным аппаратам с более чем четырьмя винтами. Так что, если вы строите октокоптер, многое из того, что вы здесь прочитали, также будет применимо.
Прежде чем я объясню, как работает квадрокоптер или любой мультиротатор, нам нужно определить несколько важных понятий — тангаж, рыскание и крен. Эти термины относятся к трем измерениям, в которых самолет в полете может свободно перемещаться.
- Шаг — Шаг относится к носовой части самолета, поднимающейся или опускающейся. Вы можете думать об этом как о скалолазании или дайвинге .
- Рыскание – С другой стороны, рыскание относится к повороту носовой части самолета влево или вправо.
 Вы можете просто думать об этом как о повороте.
Вы можете просто думать об этом как о повороте. - Крен – Чтобы понять крен, подумайте об оси, идущей от передней части самолета к задней. Когда самолет катится, он включает этот доступ. Вы также можете думать о ролле как о наклоне.
Квадрокоптеры используют 4 двигателя. Два из этих двигателей вращаются по часовой стрелке, а два других вращаются против часовой стрелки. Как показано здесь, двигатели на одной оси вращаются в одном направлении.
Высота — это термин, с которым вы, вероятно, знакомы — он просто описывает движение вверх или вниз. Квадрокоптер может либо парить, либо регулировать высоту, применяя равную тягу ко всем четырем винтам.
Для настройки Yaw , или заставить его поворачиваться влево или вправо, квадрокоптер применяет большую тягу к одному набору двигателей. Например, квадрокоптер может приложить большую тягу к двум двигателям, которые вращаются по часовой стрелке, чтобы совершить поворот.
Тангаж и крен , с другой стороны, регулируются путем приложения большего усилия к одному ротору и меньшего к другому противоположному ротору. Например, квадрокоптер может регулировать свой шаг, прикладывая большую тягу к двигателю, вращающемуся по часовой стрелке спереди, и меньшую тягу к двигателю, вращающемуся по часовой стрелке, прямо напротив сзади.
Одна вещь, которая делает квадрокоптеры легкими в управлении, заключается в том, что вам фактически не нужно регулировать скорость двигателя вручную, так как именно здесь вступают в действие контроллер и электроника. Я расскажу об электронике чуть позже, но сначала давайте осмотрим моторы.
Моторы
Мотор квадрокоптераБез моторов ваш квадрокоптер никуда не летит, и очень важно выбрать правильные. К сожалению, технические характеристики двигателя иногда могут сбивать с толку.
В большинстве квадрокоптеров используются бесщеточные двигатели постоянного тока, хотя двигатели более дешевых квадрокоптеров и микрокоптеров часто имеют щетки.
Бесщеточные двигатели состоят из ротора с постоянным магнитом и ряда окружающих его электромагнитов, которые также называются полюсами. Бесщеточные двигатели могут иметь от 2 до 14 полюсов. Чем больше число полюсов, тем точнее можно управлять двигателем.
Бесщеточные двигатели имеют три провода, эти провода управляют двигателями тремя фразами. Изменяя соединения на этих проводах, вы можете заставить двигатель вращаться по часовой стрелке или против часовой стрелки.
Одной из ключевых характеристик двигателя квадрокоптера является его рейтинг KV. KV означает не киловольты, а число оборотов в минуту (об/мин), которое двигатель будет вращать, когда к двигателю приложена разность потенциалов в 1 вольт без нагрузки. KV также можно представить как об/мин/вольт. Типичные рейтинги KV для квадрокоптеров составляют от 500 до 2500. Двигатель с низким KV может вращать большой винт и, таким образом, создавать большую тягу.
Как правило, квадрокоптеры весом более 1 кг будут использовать двигатель в диапазоне от 700 до 900 КВ. Вертолеты весом от половины до 1 килограмма используют двигатели мощностью от 900 до 1300 кВ. Для судов весом менее 500 граммов используются двигатели мощностью от 1300 до 2200 кВт.
Вертолеты весом от половины до 1 килограмма используют двигатели мощностью от 900 до 1300 кВ. Для судов весом менее 500 граммов используются двигатели мощностью от 1300 до 2200 кВт.
Другим важным фактором является максимальный номинальный ток двигателя. Вам необходимо знать это значение, измеренное в амперах, прежде чем выбрать электронный регулятор скорости (ESC) и аккумулятор.
Номинальная тяга двигателя указывается в сочетании с размером гребного винта. Это важная спецификация, требующая знания общего веса вашего квадрокоптера, имейте в виду, что этот вес включает в себя вес самих моторов.
Основное эмпирическое правило заключается в том, что комбинация двигателя и гребного винта должна быть способна генерировать тягу, вдвое превышающую вес корабля. Таким образом, для квадрокоптера с четырьмя двигателями это означает, что каждый отдельный двигатель должен обеспечивать тягу, равную половине веса всего квадрокоптера. Другими словами, для квадрокоптера весом 1 кг требуется четыре двигателя, каждый из которых способен развивать тягу не менее половины килограмма.
Другой важной характеристикой двигателя является диаметр вала. Это важно, так как определяет, какие пропеллеры вы сможете подобрать к двигателю.
Вам также следует обратить внимание на расположение крепежных винтов и креплений двигателя, чтобы убедиться, что двигатель можно правильно установить на раму квадрокоптера.
Пропеллеры
Пропеллер квадрокоптераДиаметр и шаг являются двумя основными характеристиками пропеллера. Гребные винты обычно продаются в наборах с 2 винтами по часовой стрелке и 2 винтами против часовой стрелки.
Пропеллеры бывают разных диаметров и шагов и могут быть изготовлены из пластика, углеродного волокна или даже дерева. Маленькие пропеллеры диаметром менее 8 дюймов используются для гонок и акробатики наряду с моторами с высоким КВ. Пропеллеры диаметром более 8 дюймов используются с двигателями с низким KV в конструкциях, предназначенных для подъема тяжелых грузов, таких как видеокамеры.
Pttch обычно определяется как «пройденное расстояние за один оборот». Более высокий шаг означает более медленное вращение, которое увеличивает скорость вашего автомобиля, но также потребляет больше энергии. Вы действительно можете увеличить время полета своего квадрокоптера, просто заменив пропеллеры с меньшим шагом. Пропеллеры с меньшим шагом могут генерировать больший крутящий момент и требуют, чтобы ваш двигатель потреблял меньше тока.
Более высокий шаг означает более медленное вращение, которое увеличивает скорость вашего автомобиля, но также потребляет больше энергии. Вы действительно можете увеличить время полета своего квадрокоптера, просто заменив пропеллеры с меньшим шагом. Пропеллеры с меньшим шагом могут генерировать больший крутящий момент и требуют, чтобы ваш двигатель потреблял меньше тока.
Диаметр гребного винта относится к его размеру. Увеличение диаметра увеличивает КПД гребного винта, но также потребляет больше тока от двигателя.
Соответствие двигателя пропеллеру также является фактором устойчивости, это может быть важно при переноске камеры. Для большого квадрокоптера, который может нести большую полезную нагрузку, лучше всего подходят большие пропеллеры и двигатели с низким KV.
Электронные регуляторы скорости (ESC)
Устройство, управляющее бесщеточными двигателями постоянного тока, называется электронным регулятором скорости или ESC. Вам понадобится один из них для каждого двигателя.
ESC будет иметь три комплекта проводов. Есть три провода большого сечения, которые соединяются с тремя проводами на вашем бесколлекторном двигателе. Два других провода большого сечения подключаются к вашему распределительному щиту, по которому подается напряжение на ESC и двигатели. Там также будет три меньших провода, которые подключаются к вашему полетному контроллеру.
ESC должен быть рассчитан на максимальный ток, потребляемый вашим двигателем. Всегда разумно выбирать ESC с номинальным значением выше, чем максимальный ток двигателя.
Полетные контроллеры
Полетный контроллер квадрокоптераПолетный контроллер — это мозг вашего квадрокоптера. Это устройство, которое контролирует скорость ваших двигателей, отправляя сигналы на ваши ESC.
Усовершенствованные полетные контроллеры имеют больше функций и связаны с такими датчиками, как гироскопы, акселерометры, гидролокаторы, GPS и магнитометры. Простые полетные контроллеры содержат только гироскопы, и этого вполне достаточно для большинства новичков.
Контроллер полета будет принимать сигналы от бортового радиоприемника, чтобы вы могли дистанционно управлять своим квадрокоптером. Затем он делает свое волшебство и посылает сигналы ESC для управления скоростью двигателя.
Полетные контроллеры на самом деле представляют собой небольшие компьютеры, поэтому их можно программировать и обновлять, подключив их к компьютеру. Несмотря на свою сложность, полетные контроллеры на самом деле не так уж и дороги.
Радиопередатчики и приемники
Пульт дистанционного управления квадрокоптеромВаш квадрокоптер будет иметь бортовой радиоприемник, и вы будете управлять устройством с помощью ручного радиопередатчика. Как приемник, так и передатчик определяются количеством каналов, которые они поддерживают, и частотой, на которой они работают.
Каждый канал радиосистемы управляет одной функцией или устройством квадрокоптера. Как минимум, вам понадобятся каналы для управления квадроциклом, хотя большинство людей начинают как минимум с шести. Дополнительные каналы можно использовать для управления освещением или карданным двигателем для позиционирования камеры.
Дополнительные каналы можно использовать для управления освещением или карданным двигателем для позиционирования камеры.
Четыре основных канала используются следующим образом: один канал для газа, один канал для поворота вправо и влево, один канал для тангажа вперед и назад и один для крена влево и вправо – другими словами, газ, рыскание, тангаж и крен. Канал также можно использовать для переключения между различными режимами полета.
Если вы планируете использовать несколько квадрокоптеров, вы можете купить один передатчик и несколько совместимых приемников, очевидно, это позволит вам управлять только одним коптером за раз. Это хорошая стратегия, поскольку она позволяет вам позволить себе передатчик хорошего качества, приемники, как правило, довольно недороги.
Комбинации передатчик-приемник работают в двух разных режимах, эти режимы в основном определяют конфигурацию управления на передатчике.
Конфигурация режима 1 имеет управление рулем высоты на левом джойстике и управление дроссельной заслонкой на правом джойстике. Режим 2 меняет эти элементы управления на противоположные, и это самая популярная конфигурация. Если вы новичок, обычно рекомендуется настроить ваше оборудование на работу в режиме 2.
Режим 2 меняет эти элементы управления на противоположные, и это самая популярная конфигурация. Если вы новичок, обычно рекомендуется настроить ваше оборудование на работу в режиме 2.
Аккумуляторы
Без аккумулятора ваш квадрокоптер никуда не денется. Выбор аккумулятора — одно из самых важных решений, которое вы принимаете при проектировании и сборке квадрокоптера.
Батареи большего размера будут иметь большую емкость и, следовательно, позволят увеличить время полета. Однако по мере увеличения емкости аккумулятора увеличивается и его вес, а увеличение веса вашего квадрокоптера сократит время полета, поскольку для подъема полезной нагрузки от ваших двигателей потребуется больше тока. Имейте в виду, что более тяжелый квадрокоптер также менее маневренный.
Основной характеристикой батареи является ее текущая емкость, которая измеряется в миллиамперах в час или «мАч». Аккумулятор емкостью 2200 мАч может обеспечить ток 2,2 ампера в течение 1 часа.
Другой характеристикой аккумулятора является его напряжение. Аккумуляторы состоят из нескольких ячеек, каждая ячейка обычной LiPo батареи способна выдавать 3,7 вольта. Таким образом, напряжение батареи обычно указывается как кратное 3,7 вольта, например 3,7 вольта, 7,4 вольта, 11,1 вольта и 14,8 вольта. Если вы выберете батарею с более высоким напряжением, убедитесь, что и ваш ESC, и двигатели способны поддерживать это напряжение.
Аккумуляторы состоят из нескольких ячеек, каждая ячейка обычной LiPo батареи способна выдавать 3,7 вольта. Таким образом, напряжение батареи обычно указывается как кратное 3,7 вольта, например 3,7 вольта, 7,4 вольта, 11,1 вольта и 14,8 вольта. Если вы выберете батарею с более высоким напряжением, убедитесь, что и ваш ESC, и двигатели способны поддерживать это напряжение.
Рама
Наконец мы подошли к раме, она скрепляет ваш квадрокоптер. Рамы могут быть изготовлены из различных материалов, таких как дерево, пластик или углеродное волокно. Углеродное волокно может быть очень прочным для своего веса, но также может быть и хрупким, фактор, который следует учитывать, так как вы, несомненно, разобьёте свой квадрокоптер в какой-то момент.
Размер рамы квадрокоптера указывается в миллиметрах, это расстояние между моторами вашего квадроцикла. Распространенные размеры 180, 250 и 400 миллиметров. Гоночные квадрокоптеры обычно имеют диаметр 250 миллиметров.
При выборе рамы для вашего квадроцикла убедитесь, что в ней достаточно места и свободного пространства для установки таких вещей, как регулятор скорости и полетный контроллер, а также любых дополнительных предметов, таких как камеры, которые вы хотите носить с собой.