
«Радиолокация для всех»: просто о сложном
В начале июня в свет вышла научно-популярная книга «Радиолокация для всех». Коллектив авторов под руководством генконструктора концерна «Вега», члена-корреспондента РАН, Владимира Вербы успешно справился с нелегкой задачей – рассказать просто о сложном.
Радиолокация с момента своего возникновения, в первую очередь, была нацелена на решение военных задач, но сегодня без ее помощи человек не может обходиться и в своей повседневной жизни – это мобильная связь, авиаперелеты, медицинская диагностика и многое другое. Данное издание может заинтересовать даже тех, кто совсем далек от радиотехники. Пролистаем книгу вместе и расскажем вкратце об основных понятиях, физических основах радиолокации и структуре РЛС.
Первые эксперименты: радиоволны в открытом море
Термин «радиолокация» происходит от двух латинских слов: «radiare», которое означает «излучать», и «locatio» – «размещение, расположение».
Это самое общее толкование слова «радиолокация». Более точной формулировкой будет следующая. Под радиолокацией понимают область радиоэлектроники, которая занимается разработкой методов и технических устройств (систем), предназначенных для обнаружения и определения координат и параметров движения различных объектов с помощью радиоволн.
С помощью радиолокации обеспечивается решение широкого круга задач, связанных с обнаружением воздушных и наземных объектов (целей), навигацией (обеспечением вождения) различных судов (воздушных и морских), с управлением воздушным и морским движением, управлением средствами ПВО, с обеспечением безопасности движения транспортных средств, с предсказанием возникновения погодных явлений, а также с поражением наземных (морских) и воздушных объектов в любое время суток и в любых метеоусловиях.
Самолет дальнего радиолокационного обнаружения и управления А-50У
Первые упоминания о возможности использования радиоволн для обнаружения различных объектов относятся ко второй половине 90-х годов XIX столетия. В частности, годом рождения радиолокации в России считается 1897-й, когда изобретатель радио Александр Степанович Попов, проводя свои эксперименты в открытом море по установлению связи с помощью беспроводного телеграфа, обнаружил эффект отражения радиоволн. Было это так. Летом 1897 года под руководством А.С. Попова в Финском заливе проводились испытания радиоаппаратуры, изобретенного им беспроволочного телеграфа. В испытаниях принимали участие два морских судна – транспорт «Европа» и крейсер «Азия».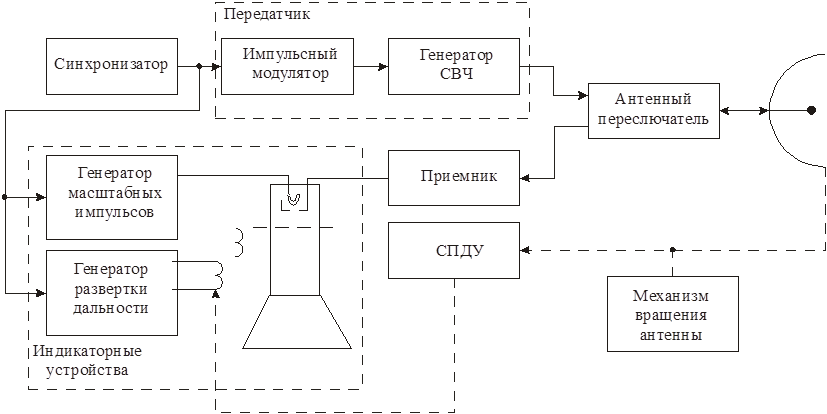
Неожиданно между кораблями прошел линейный крейсер «Лейтенант Ильин». Связь между кораблями прервалась. Через некоторое время, когда «Лейтенант Ильин» прошел линию, соединяющую корабли, связь возобновилась. Это «затенение» было замечено испытателями, и в отчете А.С. Попова по результатам экспериментов было отмечено, что появление каких-либо препятствий между передающей и приемной позициями может быть обнаружено как ночью, так и в тумане. Так родилась радиолокация.
Физика процесса: эффект Доплера, или «умное эхо»
Как и любое направление развития науки и техники, радиолокация базируется на некоторых физических основах, позволяющих обеспечивать решение стоящих перед ней задач, а именно: обнаруживать различного рода объекты и определять координаты и параметры их движения с помощью радиоволн.
Использование радиоволн, или, другими словами, электромагнитных колебаний (ЭМК), частотный диапазон которых сосредоточен в пределах от 3 кГц до 300 ГГц, определяет основные преимущества радиолокационных систем (РЛС) перед другими системами локации (оптическими, инфракрасными, ультразвуковыми). В первую очередь, это обусловлено тем, что закономерности распространения радиоволн в однородной среде достаточно стабильны как в любое время суток, так и в любое время года и, следовательно, изменение условий оптической видимости, обусловленных появлением дождя, снега, тумана или изменением времени суток, не нарушает работоспособность РЛС.
В первую очередь, это обусловлено тем, что закономерности распространения радиоволн в однородной среде достаточно стабильны как в любое время суток, так и в любое время года и, следовательно, изменение условий оптической видимости, обусловленных появлением дождя, снега, тумана или изменением времени суток, не нарушает работоспособность РЛС.
Основными закономерностями распространения радиоволн, которые позволяют обнаруживать объекты и измерять координаты и параметры их движения, являются следующие:
– постоянство скорости и прямолинейность распространения радиоволн в однородной среде (при проведении инженерных расчетов скорость распространения радиоволн принимают равной 3·10–8 м/с;
– способность радиоволн отражаться от различных областей пространства, электрические или магнитные параметры которых отличаются от аналогичных параметров среды распространения;
– изменение частоты принимаемого сигнала по отношению к частоте излученного сигнала при относительном движении источника излучения и приемника радиолокационного сигнала.
Последнее свойство радиоволн в радиолокации называют эффектом Доплера по имени австрийского ученого Кристиана Андреаса Доплера, который в 1842 году теоретически обосновал зависимость частоты колебаний, воспринимаемых наблюдателем, от скорости и направления движения источника волны и наблюдателя относительно друг друга.
Доплеровский метеорологический радиолокатор
В 1848 году эффект Доплера был уточнен французским физиком Арманом Физо, а в 1900 году – экспериментально проверен русским ученым Аристархом Белопольским на лабораторной установке. В этой связи в научно-технической литературе наименование данного эффекта можно встретить под названием «эффект Доплера – Белопольского».
Для проведения процедуры измерения расстояния до цели РЛС излучает в ее направлении зондирующий сигнал. Данный сигнал доходит до объекта, отражается от него и возвращается обратно к РЛС. Поскольку, как отмечалось ранее, скорость распространения радиосигнала в однородной среде постоянная, то для определения дальности до объекта необходимо зафиксировать момент излучения зондирующего сигнала t В результате разность (t1 – t0) позволяет определить время, в течение которого радиоволна проходит путь от РЛС к цели и обратно, которое равно 2Д, где Д – дальность до объекта (расстояние между РЛС и целью). Разность времен (t1 – t0) в радиолокации называют временем запаздывания и обозначают как tд. В результате при известной величине tд можно составить равенство 2Д = Сtд
В результате разность (t1 – t0) позволяет определить время, в течение которого радиоволна проходит путь от РЛС к цели и обратно, которое равно 2Д, где Д – дальность до объекта (расстояние между РЛС и целью). Разность времен (t1 – t0) в радиолокации называют временем запаздывания и обозначают как tд. В результате при известной величине tд можно составить равенство 2Д = Сtд
Таким образом, подводя итог процедуре измерения дальности до цели, можно констатировать, что для измерения с помощью РЛС расстояния до цели необходимо определить время запаздывания tд, которое при известной скорости распространения радиоволн позволяет определить дальность до нее.
Большой процент объектов радиолокационного наблюдения составляют подвижные или движущиеся цели. К таким целям, например, относятся самолеты, вертолеты, автомобили, люди и т. д. Основным отличительным признаком таких объектов является скорость их движения. Выявить эффект движения цели, как отмечалось ранее, можно, опираясь на эффект Доплера, который позволяет определить радиальную скорость движения цели. То есть частота принимаемых РЛС колебаний от цели, двигающейся ей навстречу, возрастает по сравнению со случаем неподвижной цели и уменьшается при удалении цели от РЛС. Данное изменение частоты принимаемого сигнала называют доплеровским смещением частоты. Величина данного смещения зависит от скорости взаимного движения носителя РЛС и цели. Необходимо заметить, что рассмотренные свойства радиоволн будут проявляться вне зависимости от условий оптической видимости в зоне радиолокационного наблюдения.
д. Основным отличительным признаком таких объектов является скорость их движения. Выявить эффект движения цели, как отмечалось ранее, можно, опираясь на эффект Доплера, который позволяет определить радиальную скорость движения цели. То есть частота принимаемых РЛС колебаний от цели, двигающейся ей навстречу, возрастает по сравнению со случаем неподвижной цели и уменьшается при удалении цели от РЛС. Данное изменение частоты принимаемого сигнала называют доплеровским смещением частоты. Величина данного смещения зависит от скорости взаимного движения носителя РЛС и цели. Необходимо заметить, что рассмотренные свойства радиоволн будут проявляться вне зависимости от условий оптической видимости в зоне радиолокационного наблюдения.
Основные классы РЛС
Выполнение частной задачи радиолокационного наблюдения, например обнаружения цели или измерения дальности до нее, осуществляется с помощью одноименных радиолокационных устройств – радиолокационного обнаружителя или радиолокационного измерителя дальности соответственно. Совокупность радиолокационных устройств, предназначенных для решения какой-либо общей задачи, например обеспечения перехвата воздушной цели либо поражения наземной цели и т. п., называется радиолокационной системой (РЛС), или радиолокатором. Техническая реализация такой системы обычно именуется радиолокационной станцией, а в англоязычной литературе – радаром.
Совокупность радиолокационных устройств, предназначенных для решения какой-либо общей задачи, например обеспечения перехвата воздушной цели либо поражения наземной цели и т. п., называется радиолокационной системой (РЛС), или радиолокатором. Техническая реализация такой системы обычно именуется радиолокационной станцией, а в англоязычной литературе – радаром.
Источником информации о цели в радиолокации служит радиолокационный сигнал. В зависимости от способов формирования радиолокационного сигнала различают следующие типы РЛС, или методы радиолокации.
1. Активные РЛС, или активный метод радиолокационного наблюдения. При данном методе с помощью РЛС формируется радиосигнал, который излучается в направлении на цель (зондирующий сигнал). В результате взаимодействия зондирующего сигнала с целью образуется отраженный сигнал, который поступает на вход приемника РЛС и затем обрабатывается в данном устройстве в целях извлечения информации о наблюдаемой цели. Данный метод радиолокационного наблюдения получил наибольшее распространение в современных РЛС. Необходимо заметить, что при использовании активного метода устройство формирования радиосигнала (передатчик) и приемник РЛС находятся в одной точке пространства.
Данный метод радиолокационного наблюдения получил наибольшее распространение в современных РЛС. Необходимо заметить, что при использовании активного метода устройство формирования радиосигнала (передатчик) и приемник РЛС находятся в одной точке пространства.
2. Активные РЛС с активным ответом. Как и в предыдущем случае, с помощью РЛС формируется радиосигнал, который излучается в направлении на цель (зондирующий сигнал). Однако радиолокационный сигнал формируется не в результате отражения излучаемых электромагнитных колебаний целью, а за счет переизлучения их с помощью специального устройства, именуемого ответчиком-ретранслятором. Данный метод широко используется в системах определения государственной принадлежности наблюдаемых объектов, управления воздушным движением, а также в радионавигационных системах.
3. Полуактивный метод радиолокации, или полуактивные РЛС. При использовании данного метода радиолокационный сигнал формируется, как при активном методе путем отражения зондирующих электромагнитных колебаний от цели. Но передающее устройство (передатчик РЛС) и устройство, принимающее отраженные сигналы (приемник РЛС), разнесены в пространстве. Данный метод, например, широко используется при наведении управляемых ракет класса «воздух – воздух» на поражаемые воздушные цели.
Но передающее устройство (передатчик РЛС) и устройство, принимающее отраженные сигналы (приемник РЛС), разнесены в пространстве. Данный метод, например, широко используется при наведении управляемых ракет класса «воздух – воздух» на поражаемые воздушные цели.
4. Пассивная радиолокация, или пассивный метод радиолокационного наблюдения, основан на приеме собственного радиоизлучения целей. Отличительной особенностью таких систем является наличие в их составе только приемного устройства. Отсутствие необходимости формирования зондирующего колебания делает такие системы высокопомехозащищенными. Данные РЛС широко применяются при пеленгации радиоизлучающих систем противника, например РЛС, входящих в систему управления ПВО противоборствующей стороны.
Таким образом, радиолокационные системы могут быть активными, полуактивными, активными с активным ответом и пассивными. Кроме того, все существующие РЛС можно разделить на следующие основные группы.
В первую группу входят РЛС класса «воздух – воздух», основной задачей которых является обнаружение, измерение координат и параметров движения воздушных целей. К данным РЛС относятся, например, радиолокационные станции перехвата и прицеливания, устанавливаемые на самолетах-истребителях, либо авиационные РЛС дальнего радиолокационного обнаружения воздушных целей.
Радиолокационная станция контроля территорий «Форпост-М»
Вторую группу составляют РЛС класса «воздух – поверхность». Данные РЛС служат для получения радиолокационного изображения земной поверхности либо информации о координатах и параметрах движения наземных целей. К данным системам относятся, например, РЛС обзора Земли, которые обеспечивают получение радиолокационного изображения поверхности Земли и информации о координатах и параметрах движения наземных целей. В эту группу входят также и РЛС, обеспечивающие радиолокационную разведку наземных объектов и наблюдение малоразмерных наземных целей.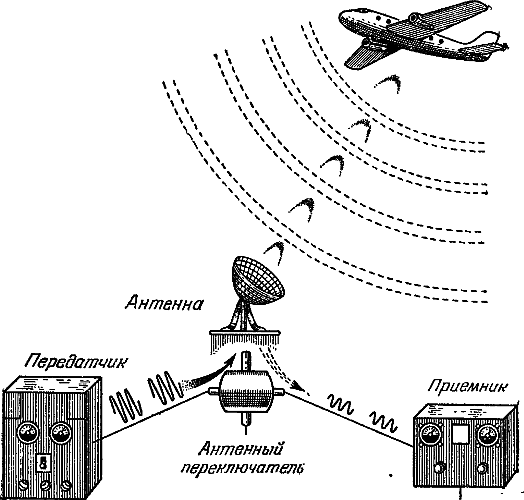
В третью группу входят РЛС класса «поверхность – воздух», основной задачей которых, как и радиолокаторов первой группы, является обнаружение, измерение координат и параметров движения воздушных целей. Однако местом установки таких систем являются либо поверхность Земли, либо объекты наземной и морской техники (подвижные или стационарные). Типичным представителем таких систем являются РЛС обнаружения, входящие в системы управления воздушным движением или противовоздушной обороны страны, а также РЛС, призванные для наблюдения за метеорологической обстановкой.
Четвертую группу составляют РЛС класса «поверхность – поверхность», основной задачей которых является обнаружение, измерение координат и параметров движения наземных целей либо воздушных объектов при перемещении последних по поверхности Земли. Типичным представителем таких систем являются, например, РЛС обзора летного поля, которые входят в системы управления движением самолетов при рулении их по летному полю.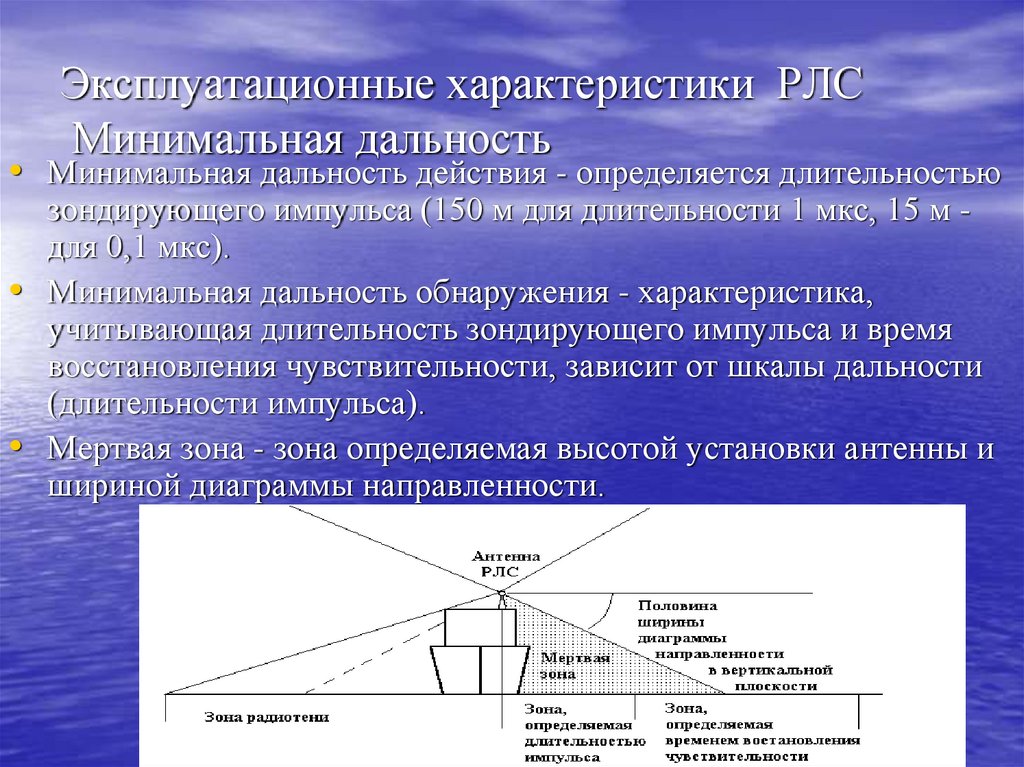
Из приведенных примеров РЛС заявленных классов следует, что на первом месте в названии класса стоит слово, обозначающее место установки радиолокатора, а на втором – слово, определяющее объект, по которому работает РЛС. В частности, например, если речь идет о классе РЛС «поверхность – воздух», то это значит, что РЛС находится на земной поверхности, а объектами ее наблюдения являются воздушные цели.
Кроме отмеченных, существует еще одна группа РЛС, которые строятся по многофункциональному принципу и объединяют в себе решение задач, например, возлагаемых как на радиолокационные системы класса «воздух – воздух», так и на системы класса «воздух – поверхность». Другими словами, данные РЛС объединяют в себе функции радиолокаторов различных классов. Такими, например, являются бортовые РЛС, устанавливаемые на современные истребители.
РЛС «Жук-АЭ» для истребителя МиГ-35
В то же время необходимо отметить, что, несмотря на проведенное выше разделение РЛС на классы, существуют специальные РЛС, которые строятся под решение специфических задач и под данное разделение на классы не подпадают. Например, РЛС, решающие задачи диагностики состояния организма человека либо наблюдения объектов, скрытых за преградами, либо наблюдения космических объектов и т.п. Но в целом приведенная классификация позволяет разделить все существующие РЛС по функциональному предназначению.
Например, РЛС, решающие задачи диагностики состояния организма человека либо наблюдения объектов, скрытых за преградами, либо наблюдения космических объектов и т.п. Но в целом приведенная классификация позволяет разделить все существующие РЛС по функциональному предназначению.
Таким образом, радиолокационные системы делятся на пять больших классов: РЛС класса «воздух – воздух», РЛС класса «воздух – поверхность», РЛС класса «поверхность – воздух», РЛС класса «поверхность – поверхность» и многофункциональные РЛС.
Как «искусственный интеллект» ищет цель
Состав элементов радиолокационной системы, конечно же, зависит от назначения системы и задач, решение которых возлагается на нее. Тем не менее можно рассмотреть некоторую обобщенную структуру РЛС и рассказать о предназначении элементов такого радиолокатора.
Представим структурную схему гипотетической РЛС, в основу работы которой положен активный метод радиолокации при импульсном режиме излучения, то есть с использованием импульсных зондирующих сигналов в виде чередующихся во времени отрезков колебаний.
На данной структурной схеме можно представить шесть основных элементов типовой РЛС, которые будут иметь место вне зависимости от принципов ее построения, – передатчик (ПРД), приемник (ПРМ), антенная система (АНТ), антенный переключатель (АП), система управления и синхронизации, система обработки.
Передатчик, или передающий тракт РЛС, обеспечивает формирование зондирующего радиосигнала, усиление его до требуемого уровня мощности и передачу в антенную систему. Антенна в импульсном радиолокаторе работает как на передачу, так и на прием. Переключение антенны из режима излучения в режим приема обеспечивается с помощью антенного переключателя, который управляется сигналами системы управления и синхронизации.
Приемник РЛС обеспечивает предварительное преобразование принятого сигнала. Во-первых, осуществляет доведение уровня принятого сигнала до необходимого значения для успешной работы последующих узлов радиолокатора. Во-вторых, осуществляет преобразование (чаще уменьшение) несущей частоты принимаемого сигнала для снижения требований к элементам системы обработки. В-третьих, обеспечивает предварительную селекцию полезного сигнала (сигнала, отраженного от цели) из сигналов помех, которые действуют одновременно с полезным сигналом.
Во-вторых, осуществляет преобразование (чаще уменьшение) несущей частоты принимаемого сигнала для снижения требований к элементам системы обработки. В-третьих, обеспечивает предварительную селекцию полезного сигнала (сигнала, отраженного от цели) из сигналов помех, которые действуют одновременно с полезным сигналом.
После предварительного преобразования в приемнике сигнал поступает в систему обработки, в которой решаются задачи по выделению из принятого сигнала информации о цели. Система обработки в современных РЛС представляет собой цифровую вычислительную систему, подобную обычному компьютеру или совокупности компьютеров. Поэтому данный элемент РЛС часто еще называют цифровой системой обработки.
Необходимо заметить, совокупность алгоритмов, закладываемых в систему обработки, определяет возможности РЛС и качество решения задач радиолокационного приема радиолокатором. Часто говорят, что система обработки определяет «интеллект» РЛС. Хотя термин «интеллект», конечно же, применим только к человеку. Однако современные технологии позволяют создавать технические системы, например, роботы, обладающие искусственным интеллектом. Современный уровень разработки алгоритмов в РЛС таков, что термин «искусственный интеллект» вполне применим и к современным радиолокаторам.
Однако современные технологии позволяют создавать технические системы, например, роботы, обладающие искусственным интеллектом. Современный уровень разработки алгоритмов в РЛС таков, что термин «искусственный интеллект» вполне применим и к современным радиолокаторам.
Подробнее о радиолокационных системах, их применении и перспективах читайте в книге «Радиолокация для всех» (В.С. Верба, К.Ю. Гаврилов, А.Р. Ильчук, Б.Г. Татарский, А.А. Филатов / под редакцией члена-корреспондента РАН В.С. Вербы).
РАДИОЛОКАЦИОННАЯ СТАНЦИЯ • Большая российская энциклопедия
Авторы: С. Л. Мишенков
РАДИОЛОКАЦИО́ННАЯ СТА́НЦИЯ (РЛС; радиолокатор, радар), устройство для обнаружения и определения местоположения объектов (целей) методами радиолокации. По характеру функционирования различают РЛС обзора и сопровождения. РЛС обзора периодически зондирует все угловые направления т. н. сектора ответственности, обнаруживает движущиеся объекты и прокладывает трассы их движения в проекции на земную поверхность или в пространстве. РЛС сопровождения в течение всего рабочего цикла измеряет координаты движущихся относительно РЛС объектов. Многофункциональные РЛС совмещают обзор и сопровождение.
н. сектора ответственности, обнаруживает движущиеся объекты и прокладывает трассы их движения в проекции на земную поверхность или в пространстве. РЛС сопровождения в течение всего рабочего цикла измеряет координаты движущихся относительно РЛС объектов. Многофункциональные РЛС совмещают обзор и сопровождение.
Состав и структура РЛС зависят от используемого метода радиолокац. наблюдения. РЛС для активной радиолокации содержит радиопередающее и радиоприёмное устройства, включая передающую и приёмную антенны (иногда одну универсальную), формирующие радиолучи с определёнными диаграммами направленности, позволяющими одновременно сканировать заданные сектора пространства обзора. Управление сканированием в РЛС первоначально осуществлялось механически (поворотом и/или качанием антенны), совр. РЛС используют, как правило, электронные методы сканирования (напр. , переключением элементов фазированной антенной решётки). Принятые сигналы обрабатываются вычислит. устройством и поступают на индикаторное устройство, отображающее направление на цель, характер наблюдаемого объекта (размеры, тип), расстояние до него, высоту, скорость и предполагаемую траекторию движения.
, переключением элементов фазированной антенной решётки). Принятые сигналы обрабатываются вычислит. устройством и поступают на индикаторное устройство, отображающее направление на цель, характер наблюдаемого объекта (размеры, тип), расстояние до него, высоту, скорость и предполагаемую траекторию движения.
Дальность действия РЛС зависит гл. обр. от мощности передатчика, частоты излучаемого (зондирующего) сигнала, параметров передающей и приёмной антенн, спектральной плотности мощности шума и др. Для определения расстояния чаще всего применяют импульсную модуляцию, измеряя время запаздывания отражённых от цели сигналов по отношению к сигналам передатчика. Для измерения скорости (радиальной) движения объекта с высокой точностью обычно используют Доплера эффект. Угловые координаты цели находят по положению (углам наклона) лучей диаграммы направленности антенны. Для повышения помехоустойчивости приёма применяют кодирование передаваемых сигналов. Местоположение объекта в пространстве чаще всего устанавливают одноврем. измерением дальности и пеленга объекта из точки расположения РЛС.
Для повышения помехоустойчивости приёма применяют кодирование передаваемых сигналов. Местоположение объекта в пространстве чаще всего устанавливают одноврем. измерением дальности и пеленга объекта из точки расположения РЛС.
Большинство РЛС работает в диапазоне от декаметровых до миллиметровых волн; их применяют в воен. деле, в мор., воздушной и космич. навигации, а также в астрономии, метеорологии и др.
Радар | Определение, изобретение, история, типы, применение, погода и факты
принцип работы радара
Смотреть все СМИ
- Ключевые люди:
- Луис Альварес Уильям Вебстер Хансен Сэр Роберт Александр Уотсон-Уотт Фредерик Эммонс Терман Альберт Хойт Тейлор
- Похожие темы:
- радиолокационная астрономия поперечное сечение радара функция неоднозначности СКР-270 ручное отслеживание
Посмотреть весь связанный контент →
Узнайте, как работает радар
Посмотреть все видео к этой статье радар , электромагнитный датчик, используемый для обнаружения, определения местоположения, отслеживания и распознавания объектов различного рода на значительных расстояниях. Он работает, передавая электромагнитную энергию к объектам, обычно называемым целями, и наблюдая отраженное от них эхо. Целями могут быть самолеты, корабли, космические корабли, автомобили и астрономические тела или даже птицы, насекомые и дождь. Помимо определения присутствия, местоположения и скорости таких объектов, радар иногда также может определять их размер и форму. Что отличает радар от оптических и инфракрасных датчиков, так это его способность обнаруживать удаленные объекты в неблагоприятных погодных условиях и точно определять их дальность или расстояние.
Он работает, передавая электромагнитную энергию к объектам, обычно называемым целями, и наблюдая отраженное от них эхо. Целями могут быть самолеты, корабли, космические корабли, автомобили и астрономические тела или даже птицы, насекомые и дождь. Помимо определения присутствия, местоположения и скорости таких объектов, радар иногда также может определять их размер и форму. Что отличает радар от оптических и инфракрасных датчиков, так это его способность обнаруживать удаленные объекты в неблагоприятных погодных условиях и точно определять их дальность или расстояние.
Радар является «активным» сенсорным устройством, поскольку он имеет собственный источник освещения (передатчик) для обнаружения целей. Обычно он работает в микроволновом диапазоне электромагнитного спектра, измеряемом в герцах (циклах в секунду), на частотах от 400 мегагерц (МГц) до 40 гигагерц (ГГц). Однако он использовался на более низких частотах для приложений дальнего действия (частоты до нескольких мегагерц, что является ВЧ [высокочастотным], или коротковолновым, диапазоном), а также на оптических и инфракрасных частотах (частоты лазерного радара, или лидар). Компоненты схемы и другое оборудование радарных систем различаются в зависимости от используемой частоты, а размеры систем варьируются от достаточно маленьких, чтобы поместиться на ладони, до таких огромных, что они могут заполнить несколько футбольных полей.
Компоненты схемы и другое оборудование радарных систем различаются в зависимости от используемой частоты, а размеры систем варьируются от достаточно маленьких, чтобы поместиться на ладони, до таких огромных, что они могут заполнить несколько футбольных полей.
Радар быстро развивался в 1930-х и 40-х годах, чтобы удовлетворить потребности военных. Он по-прежнему широко используется в вооруженных силах, где зародились многие технологические достижения. В то же время радары находят все большее число важных гражданских применений, в частности управление воздушным движением, наблюдение за погодой, дистанционное зондирование окружающей среды, авиационная и корабельная навигация, измерение скорости в промышленных целях и для правоохранительных органов, космическое наблюдение и планетарные исследования. наблюдение.
Радар обычно включает излучение узкого луча электромагнитной энергии в космос от антенны ( см. на рисунке). Узкий луч антенны сканирует область, где ожидаются цели. Когда цель освещается лучом, он перехватывает часть излучаемой энергии и отражает часть обратно в сторону радиолокационной системы. Поскольку большинство радиолокационных систем не передают и не принимают одновременно, одна антенна часто используется с разделением времени как для передачи, так и для приема.
Когда цель освещается лучом, он перехватывает часть излучаемой энергии и отражает часть обратно в сторону радиолокационной системы. Поскольку большинство радиолокационных систем не передают и не принимают одновременно, одна антенна часто используется с разделением времени как для передачи, так и для приема.
Britannica Quiz
Разберись с аббревиатурами ASAP Vocabulary Quiz
Приемник, прикрепленный к выходному элементу антенны, выделяет нужные отраженные сигналы и (в идеале) отбрасывает те, которые не представляют интереса. Например, интересующим сигналом может быть эхо от самолета. Сигналы, которые не представляют интереса, могут быть эхо-сигналами от земли или дождя, которые могут маскировать и мешать обнаружению желаемого эхо-сигнала от самолета. Радар измеряет местоположение цели по дальности и угловому направлению. Дальность, или расстояние, определяется путем измерения общего времени, которое требуется радиолокационному сигналу, чтобы пройти туда и обратно до цели и обратно (9).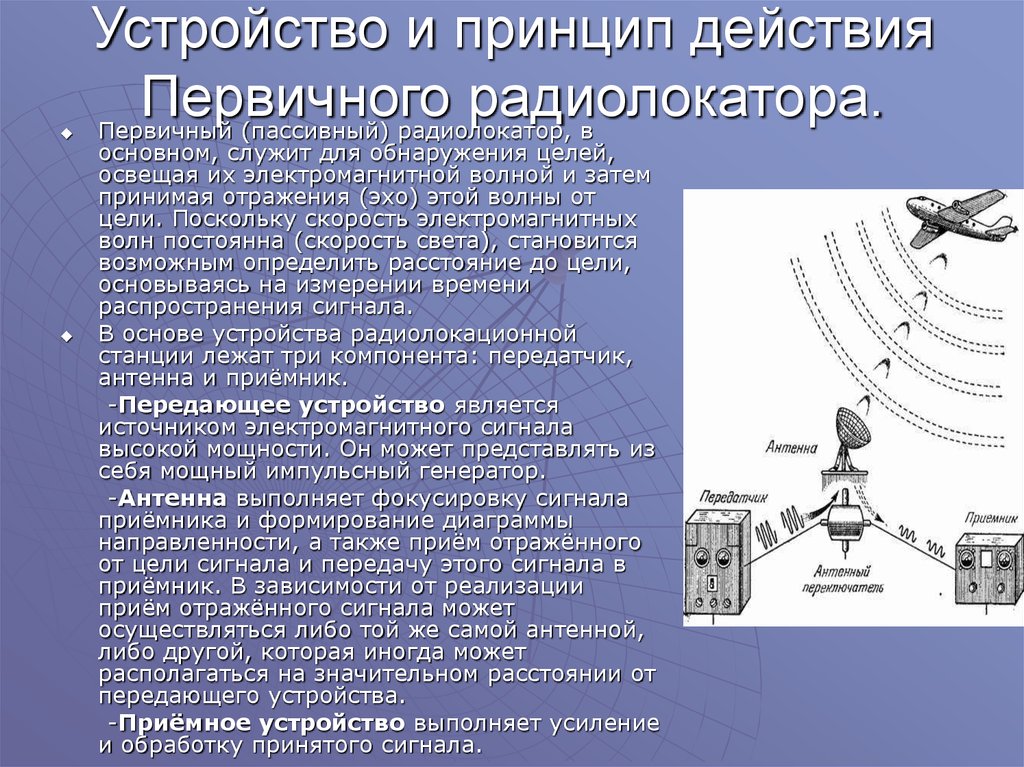 0031 см. ниже ). Угловое направление цели определяется по направлению, в котором направлена антенна в момент приема эхо-сигнала. Путем измерения местоположения цели в последовательные моменты времени можно определить недавний трек цели. Как только эта информация будет установлена, можно предсказать будущий путь цели. Во многих применениях обзорных радаров цель не считается «обнаруженной», пока не будет установлено ее отслеживание.
0031 см. ниже ). Угловое направление цели определяется по направлению, в котором направлена антенна в момент приема эхо-сигнала. Путем измерения местоположения цели в последовательные моменты времени можно определить недавний трек цели. Как только эта информация будет установлена, можно предсказать будущий путь цели. Во многих применениях обзорных радаров цель не считается «обнаруженной», пока не будет установлено ее отслеживание.
Радар | Определение, изобретение, история, типы, применение, погода и факты
принцип работы радара
Смотреть все СМИ
- Ключевые люди:
- Луис Альварес Уильям Вебстер Хансен Сэр Роберт Александр Уотсон-Уотт Фредерик Эммонс Терман Альберт Хойт Тейлор
- Похожие темы:
- радиолокационная астрономия поперечное сечение радара функция неоднозначности СКР-270 ручное отслеживание
Посмотреть весь связанный контент →
Узнайте, как работает радар
Посмотреть все видео к этой статье радар , электромагнитный датчик, используемый для обнаружения, определения местоположения, отслеживания и распознавания объектов различного рода на значительных расстояниях.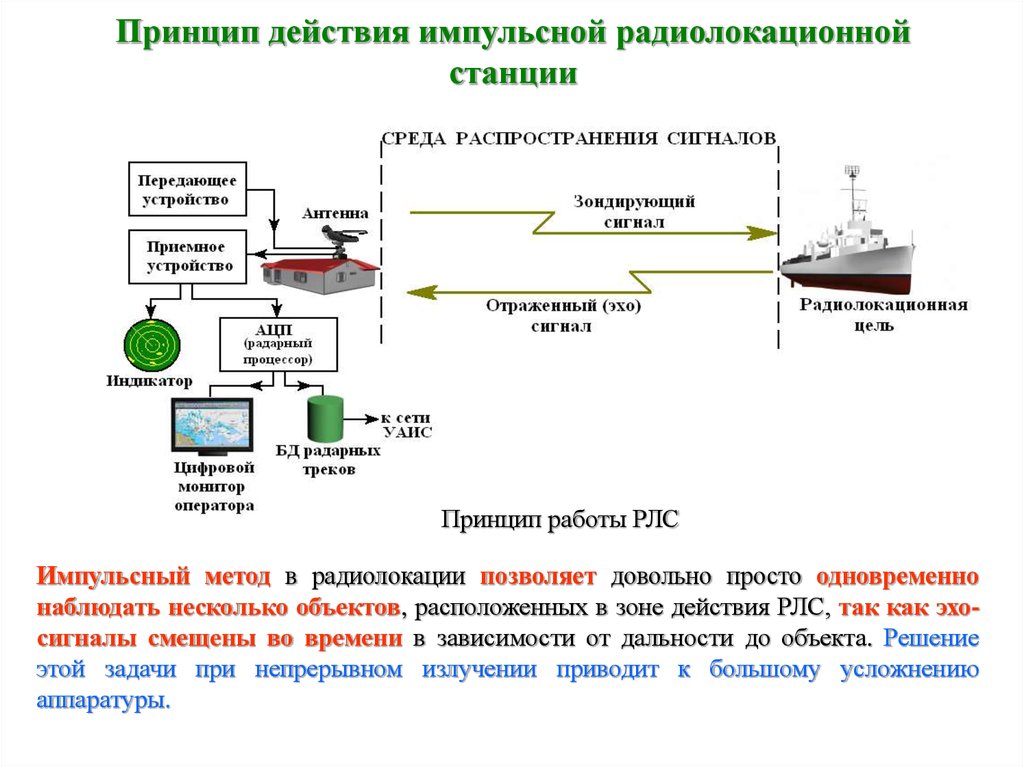 Он работает, передавая электромагнитную энергию к объектам, обычно называемым целями, и наблюдая отраженное от них эхо. Целями могут быть самолеты, корабли, космические корабли, автомобили и астрономические тела или даже птицы, насекомые и дождь. Помимо определения присутствия, местоположения и скорости таких объектов, радар иногда также может определять их размер и форму. Что отличает радар от оптических и инфракрасных датчиков, так это его способность обнаруживать удаленные объекты в неблагоприятных погодных условиях и точно определять их дальность или расстояние.
Он работает, передавая электромагнитную энергию к объектам, обычно называемым целями, и наблюдая отраженное от них эхо. Целями могут быть самолеты, корабли, космические корабли, автомобили и астрономические тела или даже птицы, насекомые и дождь. Помимо определения присутствия, местоположения и скорости таких объектов, радар иногда также может определять их размер и форму. Что отличает радар от оптических и инфракрасных датчиков, так это его способность обнаруживать удаленные объекты в неблагоприятных погодных условиях и точно определять их дальность или расстояние.
Радар является «активным» сенсорным устройством, поскольку он имеет собственный источник освещения (передатчик) для обнаружения целей. Обычно он работает в микроволновом диапазоне электромагнитного спектра, измеряемом в герцах (циклах в секунду), на частотах от 400 мегагерц (МГц) до 40 гигагерц (ГГц). Однако он использовался на более низких частотах для приложений дальнего действия (частоты до нескольких мегагерц, что является ВЧ [высокочастотным], или коротковолновым, диапазоном), а также на оптических и инфракрасных частотах (частоты лазерного радара, или лидар). Компоненты схемы и другое оборудование радарных систем различаются в зависимости от используемой частоты, а размеры систем варьируются от достаточно маленьких, чтобы поместиться на ладони, до таких огромных, что они могут заполнить несколько футбольных полей.
Компоненты схемы и другое оборудование радарных систем различаются в зависимости от используемой частоты, а размеры систем варьируются от достаточно маленьких, чтобы поместиться на ладони, до таких огромных, что они могут заполнить несколько футбольных полей.
Радар быстро развивался в 1930-х и 40-х годах, чтобы удовлетворить потребности военных. Он по-прежнему широко используется в вооруженных силах, где зародились многие технологические достижения. В то же время радары находят все большее число важных гражданских применений, в частности управление воздушным движением, наблюдение за погодой, дистанционное зондирование окружающей среды, авиационная и корабельная навигация, измерение скорости в промышленных целях и для правоохранительных органов, космическое наблюдение и планетарные исследования. наблюдение.
Радар обычно включает излучение узкого луча электромагнитной энергии в космос от антенны ( см. на рисунке). Узкий луч антенны сканирует область, где ожидаются цели.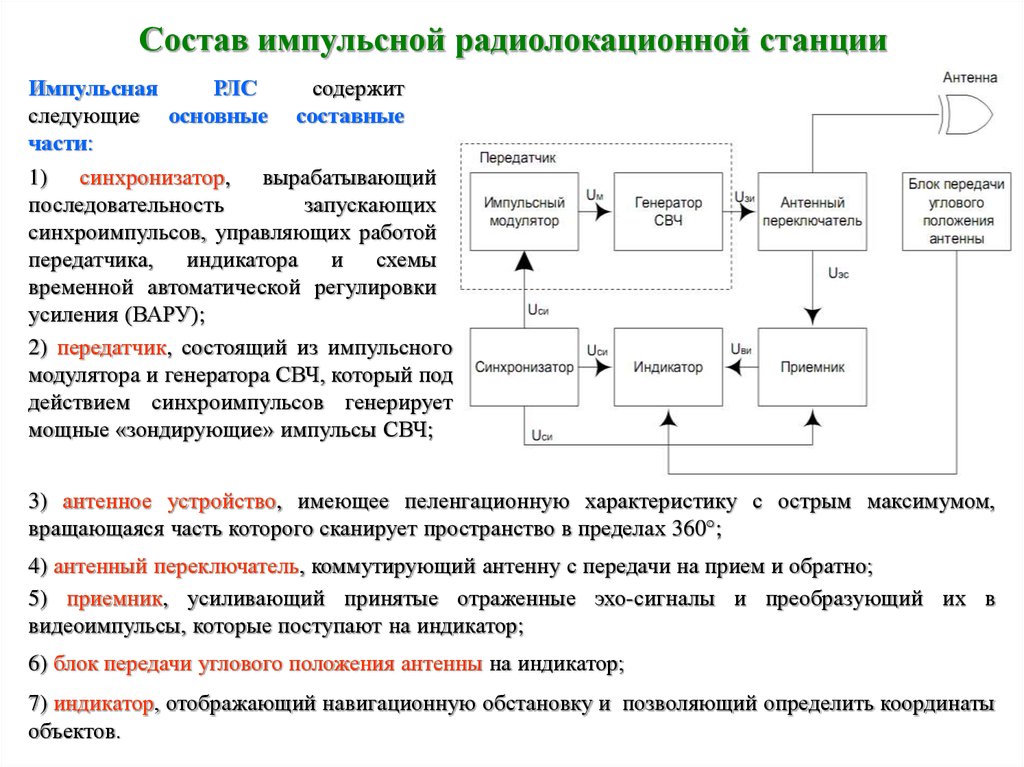 Когда цель освещается лучом, он перехватывает часть излучаемой энергии и отражает часть обратно в сторону радиолокационной системы. Поскольку большинство радиолокационных систем не передают и не принимают одновременно, одна антенна часто используется с разделением времени как для передачи, так и для приема.
Когда цель освещается лучом, он перехватывает часть излучаемой энергии и отражает часть обратно в сторону радиолокационной системы. Поскольку большинство радиолокационных систем не передают и не принимают одновременно, одна антенна часто используется с разделением времени как для передачи, так и для приема.
Britannica Quiz
Разберись с аббревиатурами ASAP Vocabulary Quiz
Приемник, прикрепленный к выходному элементу антенны, выделяет нужные отраженные сигналы и (в идеале) отбрасывает те, которые не представляют интереса. Например, интересующим сигналом может быть эхо от самолета. Сигналы, которые не представляют интереса, могут быть эхо-сигналами от земли или дождя, которые могут маскировать и мешать обнаружению желаемого эхо-сигнала от самолета. Радар измеряет местоположение цели по дальности и угловому направлению. Дальность, или расстояние, определяется путем измерения общего времени, которое требуется радиолокационному сигналу, чтобы пройти туда и обратно до цели и обратно (9).